簡述液壓挖掘機智能化設計探究
2016-03-22 04:03:34曹右可
環球市場 2016年35期
關鍵詞:智能
曹右可
山重建機有限公司
簡述液壓挖掘機智能化設計探究
曹右可
山重建機有限公司
挖掘機作為各種土木工程不可或缺的機械工具,其智能化方面的探究不但可以提升挖掘機的工作效率,從很大程度上也能保障操作人員的人身安全,具有重大的科研意義。
液壓挖掘機;智能化設計;矩陣系統
前言
液壓挖掘機是用來挖掘巖石工程的主要機械。它是用鏟斗上的斗齒切屑土石,將其裝進斗里面,提升鏟斗,接著旋轉工作臂至卸土點卸土,再回轉至挖掘點進行下一次挖掘的。最為核心的是需要操作員對其進行手柄和行走操縱桿來實現挖掘動作。然而,操作效率的有效提升和操作人員的有著密切的關系,這需要強度巨大的工作力度和控制精準度。
1 液壓挖掘機的組成
如圖1所示,液壓挖掘機主要由工作裝置、液壓系統、行走裝置、控制系統、回轉裝置、回轉平臺、動力裝置和電氣系統。根據不同的工作設備,液壓挖掘機可以配備起重、裝載、鉆孔、正鏟、反鏟以及其他不同的裝置,依次完成起重、裝載、鉆探、開挖等工作。

如圖2所示,整個手臂反鏟工作裝置,用于挖掘停機面下面的各種砂石,主要由鏟斗、連桿、搖桿, 鏟斗油缸、斗桿、斗桿油缸、動臂和動臂油缸等部工況等其他類似裝置,整個結構簡單,重量輕。反鏟鏟斗的形狀和大小與工作相關的對象,一個挖掘機鏟斗可配備各種結構。
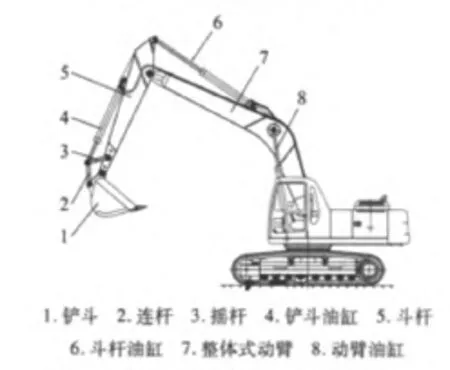
圖2 整體動臂反鏟式工作裝置的組成
2 液壓挖掘機智能控制系統設計
構建的智能挖掘機主要有4種模式:
(1)常規模式常規模式下操作人員可以通過操作電手柄、電腳踏板來控制挖掘機;
(2)遙控模式遙控模式下操作人員可通過遙控裝置進行遙控操作,且可利用遠程監控系統實現遠程操作;
(3)智能控制,以減少智能控制在實際操作的復雜性程度為目標。首先,考慮操作模型應是圖形輸入模型,依照系統的工作要求,進入預期的作業模式。智能挖掘機基于需求模型、智能路徑規劃工作。在工作的過程中,實際的工作路徑不斷與規劃路徑和修改的需求,然后根據需求模型挖掘。
首先,操作員可以使用電手柄,通過專用電動油門PLC控制器,電液比例閥組和繼電器發出指令。電動油門控制發動機轉速和功率調整泵和電機。根據柴油發動機的外特性曲線我們可以知道,柴油機接近恒扭矩調節,其輸出功率與轉速的發生了改變了。油門開度增減,柴油機輸出功率隨之增加或減少。由于輸出轉矩基本不變,柴油機速度也相應的增加或減少,也就是說,不同的油門開度對應不同的柴油發動機轉速。因此,系統增加了速度傳感器監測柴油機的油門和力量變化。液壓系統可分為定量系統和變量系統。定量系統是指系統與負載流不會改變,這取決于節流調速。
其次,操作員也可以實施遠程遙控。遙控操作主要是利用攝像機把相關的現場圖像傳輸到遠程監控計算機上,根據計算機操作員反映情況,使用遠程控制手柄PLC控制挖掘機操作命令。挖掘機工作環境通常是臟亂差,夏季的陽光照射猛烈,加上操作環境伴隨危險,在挖拆除建筑物時被廢墟掩埋的情況時有發生下。通過遠程控制操作,操作者可以坐在舒適的辦公室工作,在危險的工作環境下可以保證操作員的人身安全。
第三,操作員可以輸入的預期提前挖掘模型,和液壓挖掘機。在這個過程中,關鍵是液壓挖掘機智能定位和測距。定位技術方面,目前主要的定位技術有GPS、AFLT、A—GPS等,定位精度高的為GPS、A—GPS技術,但其定位精度最高也在10 m左右,完全不能滿足智能挖掘機作業需要。
3 壓挖掘機三維立體智能視覺矩陣系統設計
首先假定一個測距傳感器組是由A5×5。共有25個傳感器探頭,水平方向和垂直方向探測器間距是1米,面積范圍距離傳感器探測距離總共4米長和4米寬,區域為16平方米。在這個范圍內每一個距離傳感器可以測量對應點之間的距離和距離傳感器,使測量距離矩陣是B5×5。除了紅外傳感器可以測量每點溫度,溫度矩陣設置C5×5,每一點有兩種類型的識別特征距離和溫度, 此時每個點有兩種標識特征——距離和溫度,設標識特征的種類數為N,則可見N越大,越能更清楚地標識該點。
4 液壓挖掘機智能裝載設計
反鏟鵝頸型液壓挖掘機主要用于建筑行業, 在挖掘后,考慮的問題是怎么樣讓材料運輸到重型卡車上。液壓挖掘機一般會旋轉約90。材料將被發送到重型卡車,因為前面的傳感器組直接到前面,在挖掘機的過程中旋轉會產生一個更大的視角。距離測量傳感器組添加到4組, 且固定于回轉裝置與行走部固定位置,這樣的距離測量傳感器組不旋轉旋轉平臺和工作設備一齊轉動,且具有4個方向的視野。
液壓挖掘機在從前方轉到卡車裝料側時,測距傳感器組1和測距傳感器組2或3會進行信息交流對接,實現工作狀態實時跟蹤。智能液壓挖掘機在卸料前必須先確定重型卡車的位置,首先,在重型卡車車廂邊緣安裝一條標識帶。在水平方向卡車標識帶若未進入智能挖掘機工作范圍,可通過液壓挖掘機自動調整位置使其進入視覺范圍,當然調整距離是有限的,若需遠距離調整則需要調整重型卡車位置。
液壓挖掘機在從前面轉到卡車裝料側的時候,測距傳感器組1、組2或組3實現信息的交流對接,以此實現實時跟蹤的工作狀態。智能液壓挖掘機必須首先確定卸貨前重型卡車的位置。在水平方向上,如果卡車的標記不能進入智能挖掘機相關的工作范圍,液壓挖掘機可以自動調整位置的可視距離,當然,調整的距離具有局限性。
5 液壓挖掘機智能防傾覆設計
液壓挖掘機和公路行駛汽車相比,行駛狀況會更加麻煩且繁雜 ,上坡和下坡的角度后會更加大,從而大大增加側翻的概率。有必要研究如何防止液壓挖掘機在工作過程中側翻。智能液壓挖掘機有常規模式、遙控模式、智能控制3種模式,利用常規模式和遠程模式,操作人員將根據前面的路況,簡單的確定出液壓挖掘機有沒有發生側翻,并且通常不帶液壓挖掘機極限位置發生側翻的可能性,但是不同的智能控制模式,在人沒有參與的控制之下,這時液壓挖掘機是否會發生傾覆只能靠液壓挖掘機自身智能判斷控制。
通過科學的分析和研究,液壓挖掘機的側翻條件已有了相關結論。當液壓挖掘機工作裝置的工作方向平行于液壓挖掘機履帶架,液壓挖掘機的最大下坡角是450(斜率45,已是很大)。如果在這個時候和地面摩擦可以確保液壓挖掘機在坡面靜止, 整機重心G只要在L長度范圍內,只要液壓挖掘機的L長度范圍內不會翻轉,如圖10所示,這是最大的坡度,而重心在L和G的區域內 ,并且遠離邊界,只要摩擦力度夠大發生側翻的幾率微乎其微。
猜你喜歡
開放教育研究(2021年3期)2021-05-25 02:41:06
小學科學(學生版)(2020年12期)2021-01-08 09:28:04
裝備制造技術(2020年4期)2020-12-25 05:26:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
能源(2018年4期)2018-05-19 01:53:44