噴桿式噴霧機藥箱藥液晃動三向力的測量與分析
2016-03-23 03:37:23張安東邱白晶蔡彥倫
農機化研究 2016年11期
張安東,邱白晶,童 翔,蔡彥倫
(江蘇大學 現代農業裝備與技術省部共建教育部重點實驗室/江蘇省重點實驗室,江蘇 鎮江 212013)
?
噴桿式噴霧機藥箱藥液晃動三向力的測量與分析
張安東,邱白晶,童翔,蔡彥倫
(江蘇大學 現代農業裝備與技術省部共建教育部重點實驗室/江蘇省重點實驗室,江蘇 鎮江212013)
摘要:針對3WPJ-500D噴桿式噴霧機在生產實踐中出現的操控穩定性差問題,從噴霧桿式噴霧機在田間作業時藥箱內藥液晃動產生的附加作用力入手探索,研制了專用的三向力傳感器。通過田間試驗測量3WPJ-500D噴桿式噴霧機在3種行駛速度和6種加液量情況下的藥箱藥液晃動三向力。藥箱藥液晃動三向力是一種交變載荷,總體上隨加液量和行駛速度的增加而增大。其中, x方向力的峰值為2 025N,出現在400L加液量、4.78km/h速度工況下;y方向力和z方向力的峰值分別為1 817N和596N,均出現在500L加液量、4.78km/h速度工況下。經計算,噴霧機500L加液量、4.78km/h速度行駛時的藥箱藥液晃三向力的合力最大值達到2 155N。試驗結果表明:相同工況下同時獲得的藥箱藥液晃動三向力數據的峰值出現的時刻并不一致,但主要的波峰和波谷在相位上接近。該研究可為進一步研究藥箱藥液晃動力對噴霧機運動的影響以及新型噴霧機的設計提供依據。
關鍵詞:噴桿式噴霧機;藥箱藥液晃動三向力;三向力傳感器;峰值;合力
0引言
液體晃動產生的附加作用力會影響整個載液系統的動力學行為。P.K.Panigrahy[1]設計了一套帶有曲柄連桿機構的試驗裝置激勵平放矩形液箱,測量分析了不同深度液體晃動對箱壁施壓的情況。Zhou L[2]分析指出部分充液的阻尼衛星在外界干擾下液體晃動會導致衛星運行軌跡的明顯不平衡,并仿真驗證了阻尼衛星的混沌運動現象。液體晃動問題在液罐車運輸領域有廣泛的研究。劉奎等[3-4]采用VOF模型對罐車液體的晃動進行數值模擬,計算了制動和轉向時罐車的受力與軸荷分布,提出應加設防波板遏制罐內液體的晃動。王云鵬[5]分析了液罐車側傾時的受力情況,在ADAMS平臺上仿真分析了不同載液量和行駛速度下液罐車的轉向和移線工況,結果表明:載液量和行駛速度的增加都會加大液罐車側翻的風險。而對于藥箱占比很大的小型噴桿式噴霧機未見相關研究。噴桿式噴霧機高重心、窄輪距、寬噴桿、載液重的特點使其作業姿態更易受到自身藥箱內液體晃動力的影響,降低其行駛穩定性,增加駕駛員的操作難度和危險。而噴霧機的機組運動又直接影響噴霧沉積均勻性[6-7]。因此,噴桿式噴霧機藥箱藥液晃動問題不可忽略,對其研究具有重要實際意義。
本文提出一種基于應變測量原理[8-9]的噴霧機藥箱藥液晃動力測量方法,設計了三向力傳感器,通過田間試驗采集了各工況下的藥液晃動三向力信息,以期為今后噴桿式噴霧機的設計開發提供依據。
1三向力傳感器的設計
1.1 試驗樣機
試驗樣機選擇3WPJ-500D噴桿式靜電噴霧機,主要參數如表1所示。液體晃動的動壓力難以直接監測,本傳感器的設計思路是通過測量藥箱的受力來間接獲取藥液晃動的附加作用力。對噴霧機藥箱藥液晃動進行力學分析,如圖1所示。
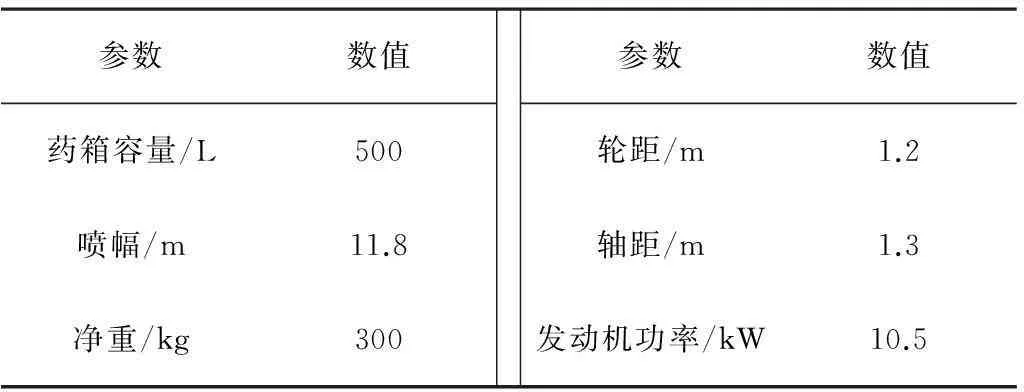
表1 噴桿式噴霧機主要技術參數
由于噴霧機在田間行駛時藥箱內藥液呈三維運動[10],藥箱在各個方向上都會受到藥液的沖擊。考慮到液體質心在三維坐標系下的變化,這里重點關注藥箱所受的3個軸向力Fx、Fy和Fz。因此,首先要求所設計傳感器要在承載藥箱的基礎上接受藥液晃動傳遞給底盤的作用力,其次對噴霧機原有結構改動小以免使測量結果失真,即滿足強度和安裝兩個要求。
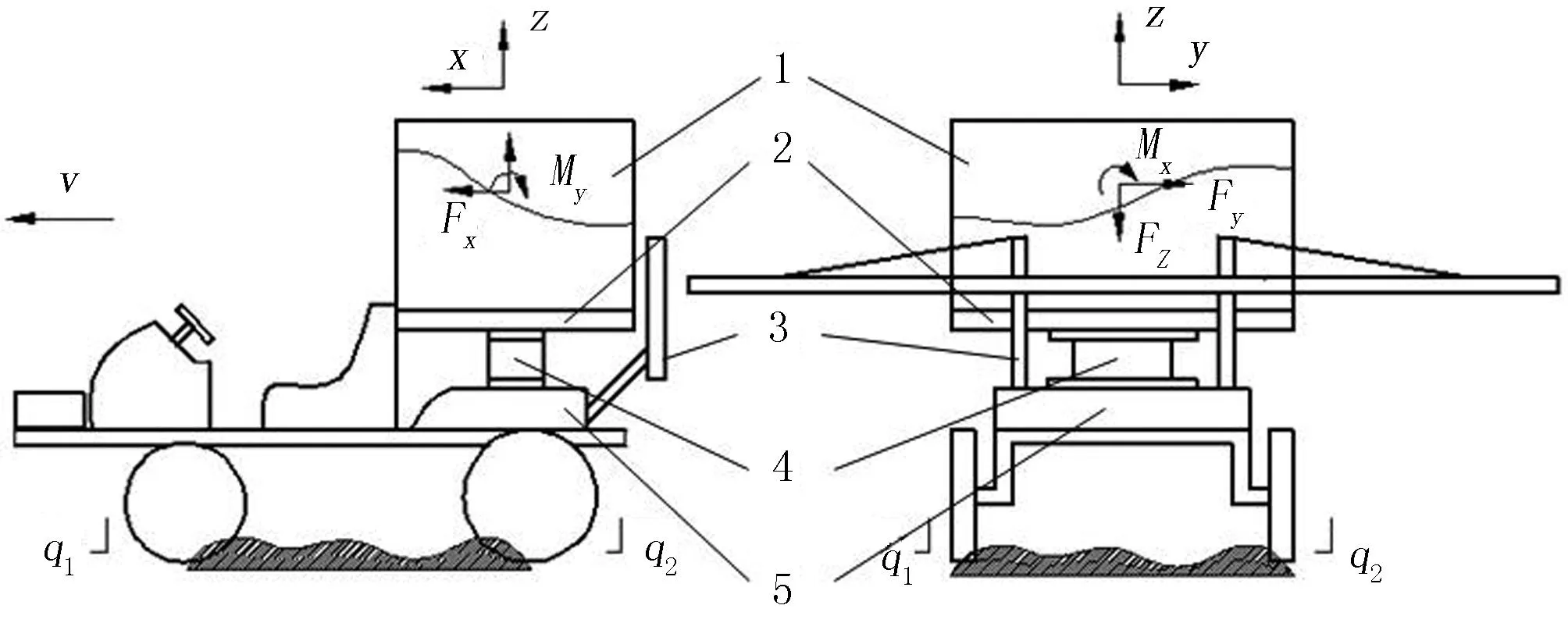
1.藥箱 2.藥箱支架 3.噴桿機架 4.傳感器 5.底盤機架
1.2 三向力傳感器的結構設計和布片
根據噴霧機藥箱藥液晃動力學模型,此傳感器的結構和布片不僅要滿足3個軸向測量方向靈敏度,還應盡量減少非測量力矩的干擾并減小各測量力之間的耦合。傳感器結構與橋路組合如圖2、圖3所示。
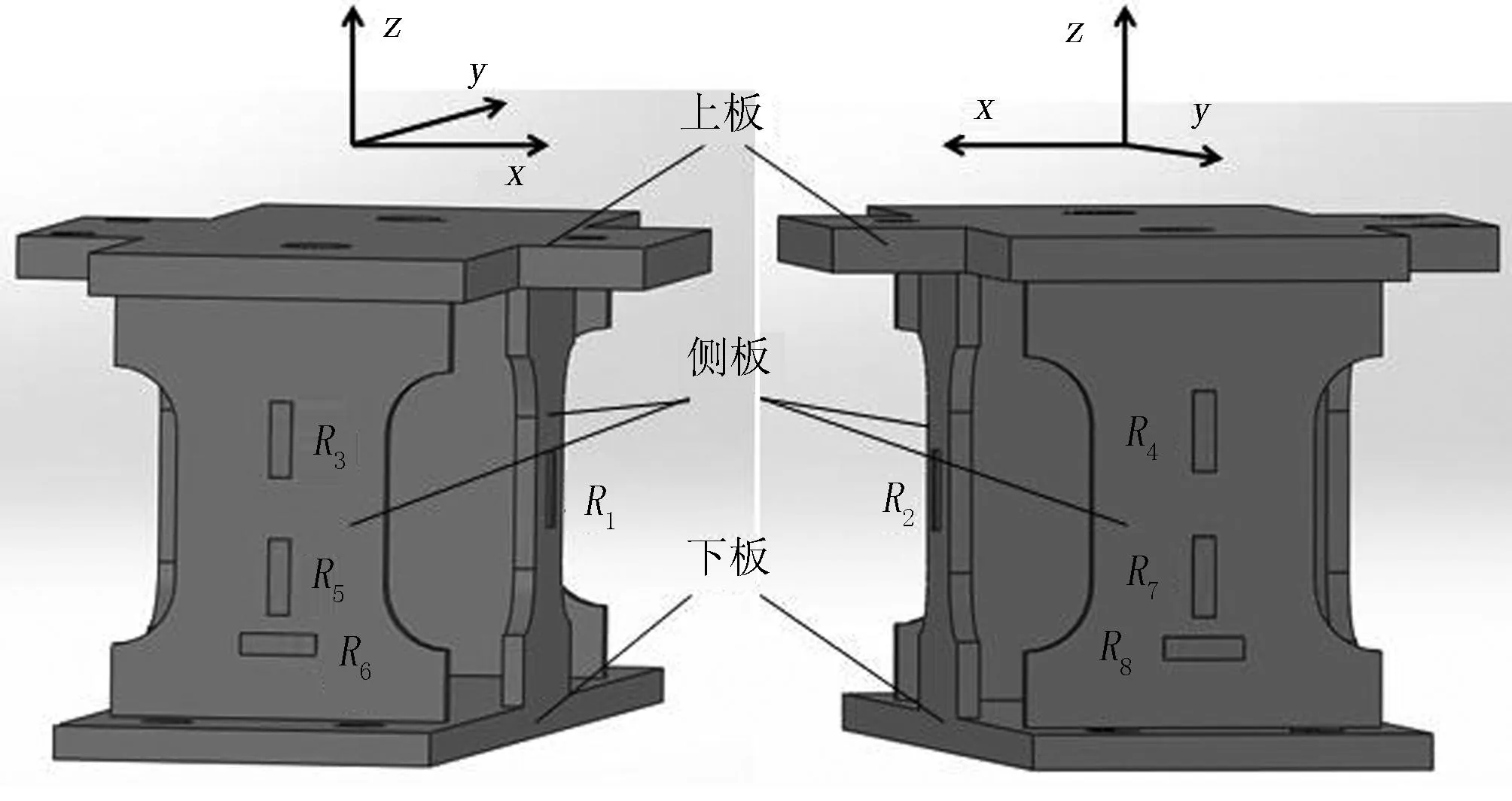
圖2 傳感器結構及應變片布片示意圖
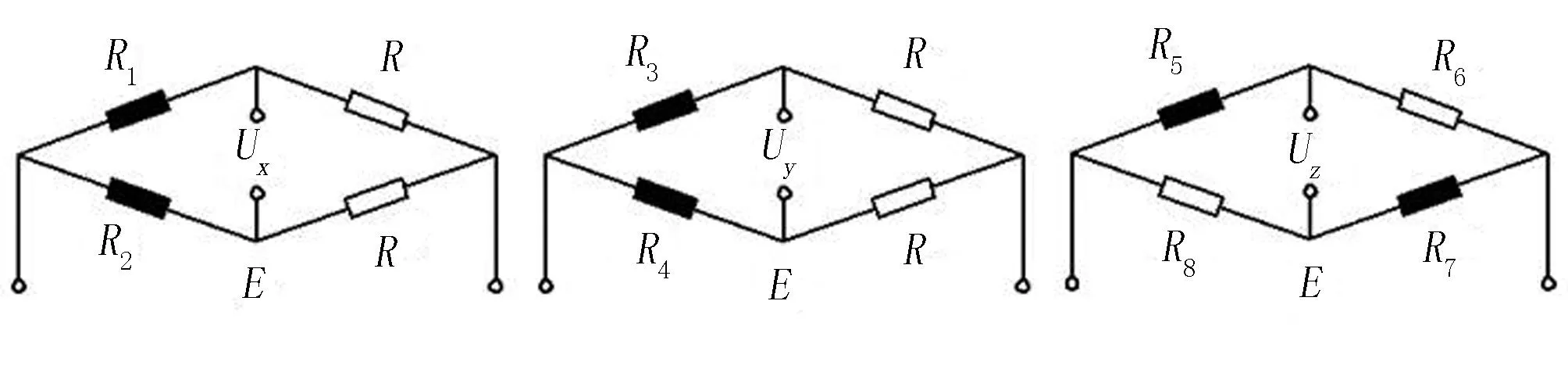
(a)x方向測量橋路(b)y方向測量橋路(c)z方向測量橋路
Ux、Uy、Uz.x、y、z方向橋路的輸出電壓E.直流電源
圖3傳感器測量橋路
Fig.3Bridge circuit of sensor
傳感器是由上板、側板和下板組成的整體對稱結構。上板作為加載端與藥箱支架相連,下板作為固定端與底盤機架相連,連接方式為螺栓連接,4塊側板作為應變梁接受晃動力并產生應變,4塊側板兩兩垂直保證對不同方向力不同的敏感程度。其中,4塊側板的厚度為3mm,上板的厚度為10mm,下板厚度為8mm,以減小受力時加載端和固定端的變形,保證應變主要發生在4塊側板上。傳感器彈性體材料選擇Q235,此鋼材的強度、塑性和焊接等綜合性能較佳。傳感器的主要結構尺寸如圖4所示。
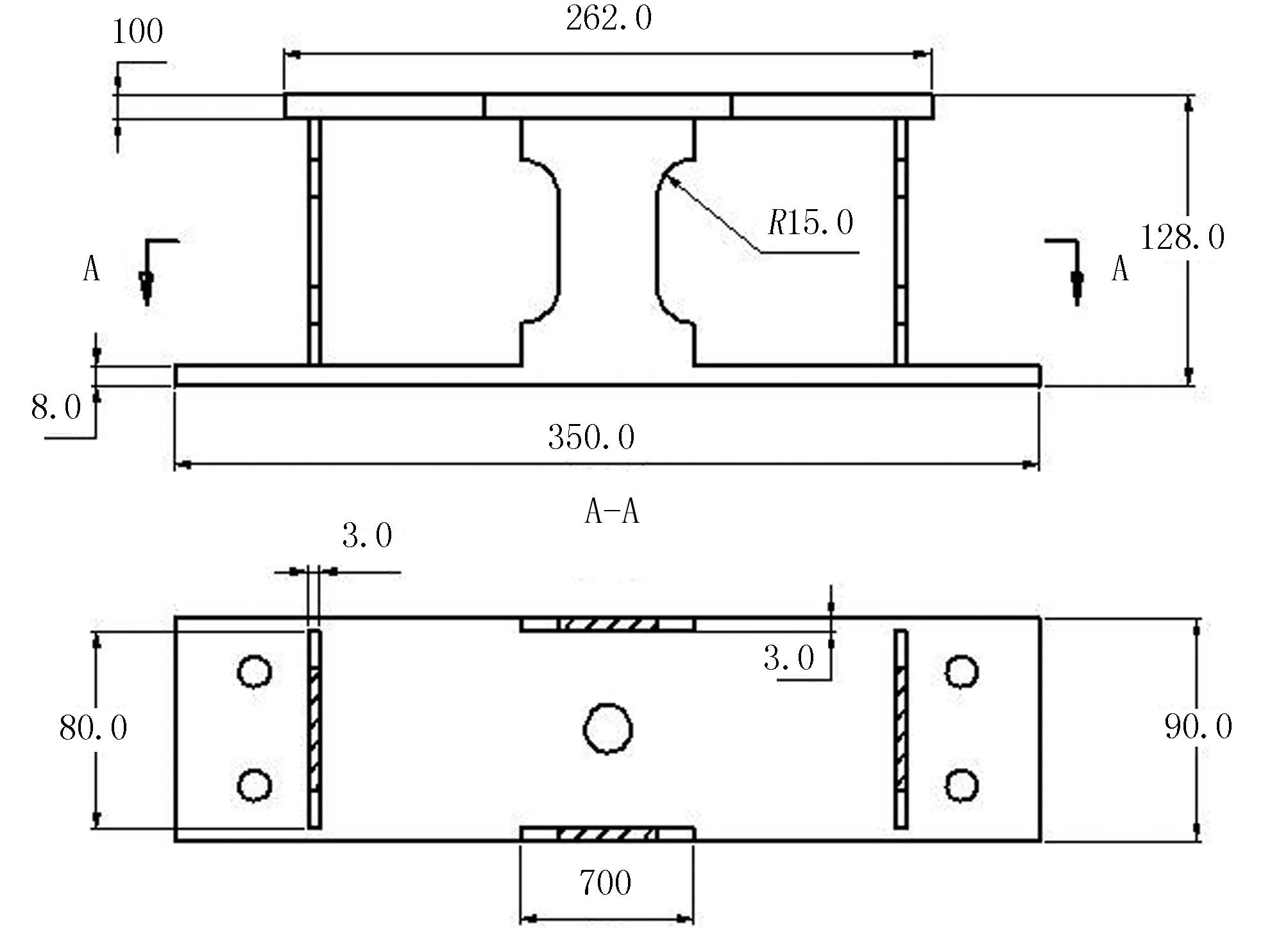
圖4 傳感器主要尺寸

2三向力傳感器的標定解耦
2. 1 三向力傳感器的耦合分析
盡管在傳感器結構設計和布片方式等方面已經考慮了力與力之間的干擾問題,但實際上,力的相互作用不可能完全靠結構或布片消除。因此,在實際測量之前必須通過標定找到所測力與傳感器電壓輸出之間的關系,以便在對測量量進行換算時修正或消除干擾[12-13]。傳感器的輸出電壓和三向力的實際關系為
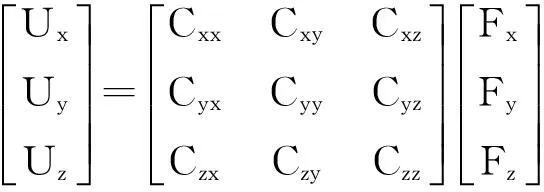
(1)
其中,Ux、Uy、Uz為各橋路電壓輸出,令式(1)中的3階矩陣為解耦矩陣C,Cxx、Cxy、…、Czz為C中元素。其中,Cxx表示x方向施加的載荷與x方向輸出電壓間的系數;Cxy表示x方向施加的載荷與y方向輸出電壓間的系數,其他系數以此類推。因此,解耦矩陣C中的9個元素可以通過靜態標定獲得。
2.2 三向力傳感器的靜態標定
本標定試驗在江蘇大學現代農業裝備與技術教育部重點試驗室進行,方法是依次在傳感器的x、y、z3個方向上加載和卸載定值砝碼[14],記錄每次加載(卸載)時3個橋路上的電壓輸出,正負方向各重復標定3次;采樣頻率為100Hz,放大倍數10。
傳感器x方向標定結果如圖5所示。x方向橋路輸出電壓的絕對值Ux(mV)與縱向載荷Fx(N)的線性關系為
y=0.169x-0.563
(2)
相關系數R2=0.998。此時, y方向橋路輸出電壓及z方向橋路輸出電壓與縱向載荷的關系分別為y=0.012x+0.108,y=0.045x+1.492。
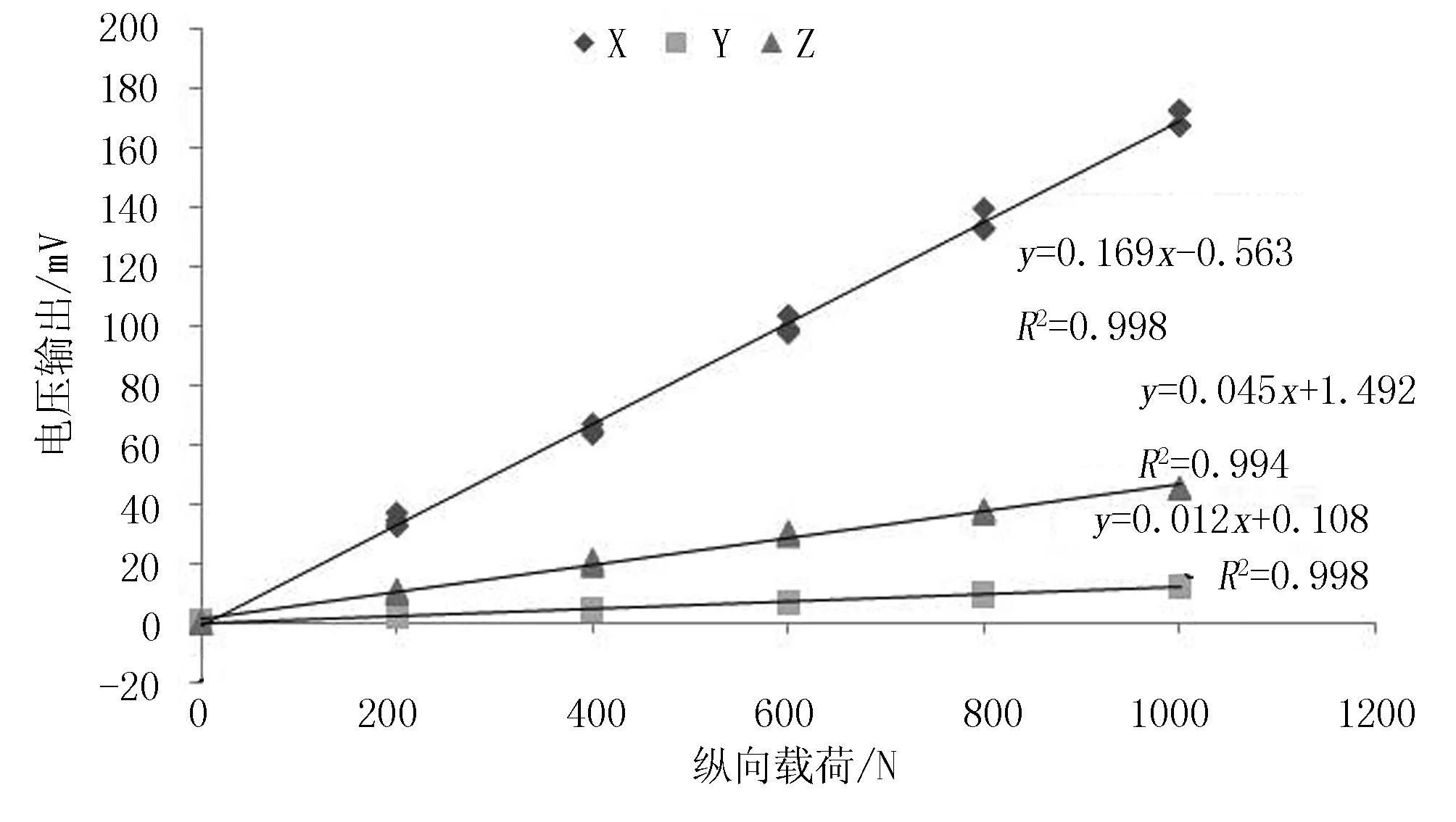
圖5 傳感器x方向標定曲線
傳感器y方向標定結果如圖6所示。y方向橋路輸出電壓的絕對值Uy(mV)與橫向載荷Fy(N)的線性關系為
y=0.046x+1.910
(3)
相關系數R2=0.991。此時,x方向橋路輸出電壓及z方向橋路輸出電壓與縱向載荷的關系分別為y=0.012x+0.107,y=0.045x+1.492。
傳感器z方向標定結果如圖7所示。y方向橋路輸出電壓的絕對值Uz(mV)與橫向載荷Fz(N)的線性關系為
y=0.225x+3.272
(4)
相關系數R2=0.992。此時,x方向橋路輸出電壓及y方向橋路輸出電壓與縱向載荷的關系分別為y=0.043x-2.720,y=0.024x-2.276。
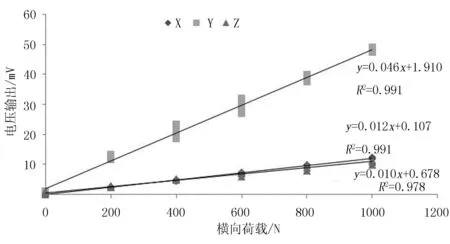
圖6 傳感器y方向標定曲線
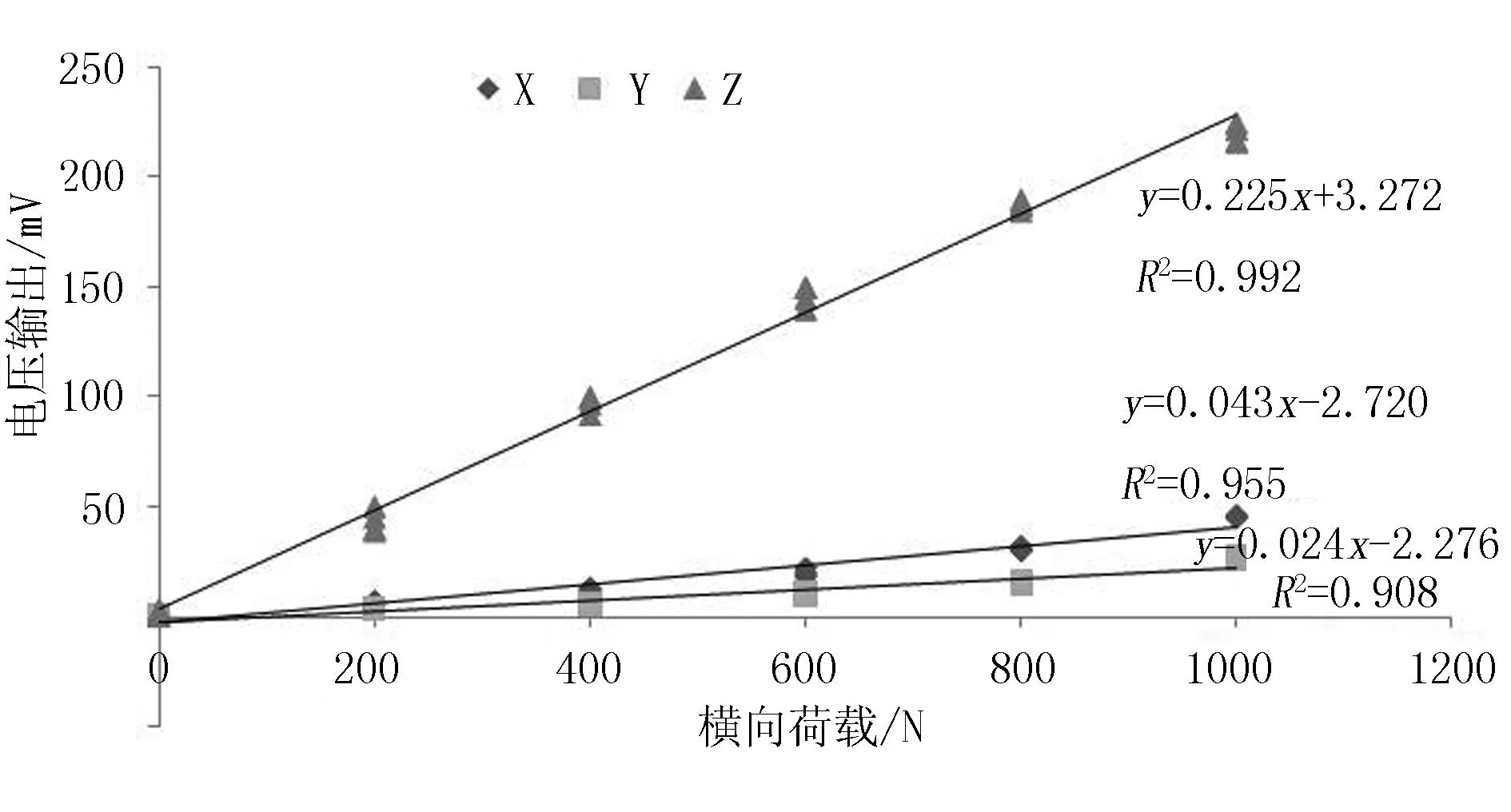
圖7 傳感器y方向標定曲線
故根據各方向標定數據的擬合曲線,得到傳感器的輸出電壓和三向力間的關系為

(5)
3噴霧機藥箱藥液晃動三向力測量試驗
3.1 試驗方案設計
試驗測量噴桿式噴霧機0~500L(步長100L),6種加液量,I擋(2.59km/h)、II擋(3.40km/h)、III擋(4.78km/h),3種速度直線行駛工況下的藥液晃動三向力,行駛速度在試驗前進行標定[15]。
試驗場地為江蘇省鎮江市一塊100m×200m的閑置田塊。用米尺量出100m長度作為數據采樣區,前后各留出20m的范圍供噴霧機加減速和轉彎。試驗場地設計如圖8所示。
與三向力傳感器配套使用的數據采集儀和動態應變儀通過纖維繩固定在噴霧機上,并在其與噴霧機之間加墊隔震材料。三向力傳感器通過螺栓安裝在藥箱支撐架正下方的噴霧機底盤機架上,安裝時各螺栓給予一定的預應力。測量裝置的布置如圖9所示。
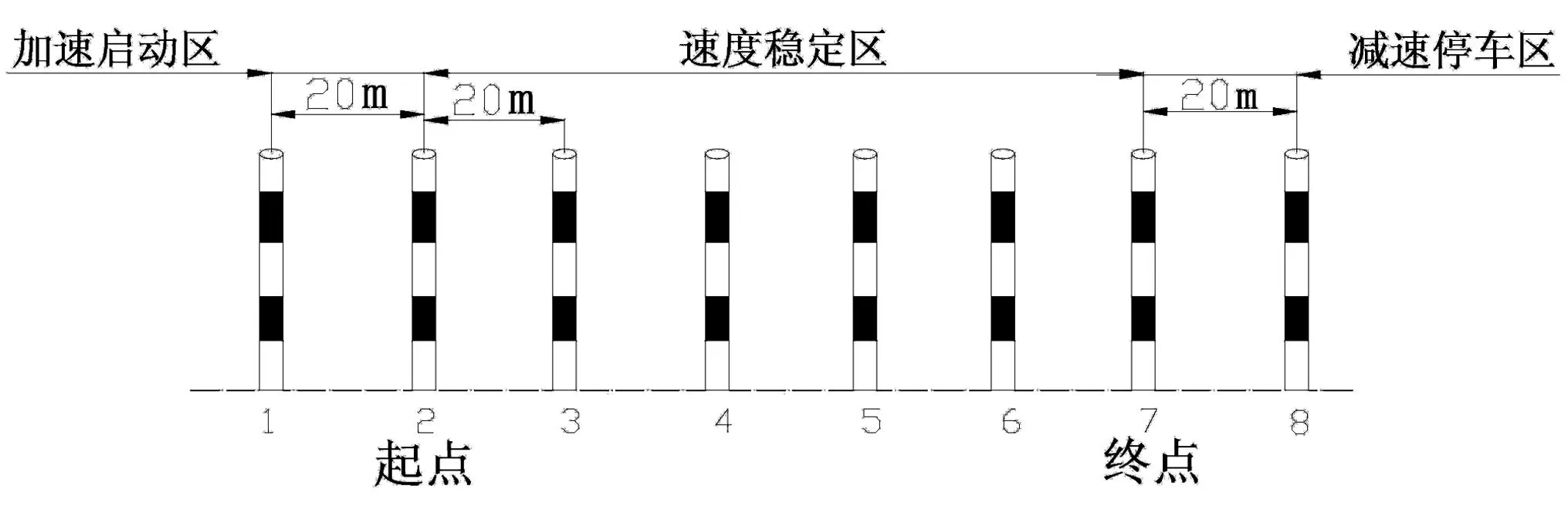
圖8 試驗場地設計
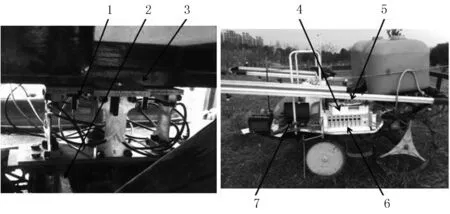
1.三向力傳感器 2.噴霧機底盤機架 3.藥箱支架
3.2 試驗結果與分析
試驗數據經50Hz低通濾波處理并按式(5)換算后,得到的結果顯示噴霧機藥箱藥液晃動三向力是一種呈隨機變化的交變載荷。當藥箱加液量為0L時傳感器也有一定的輸出,這是水箱支架和藥箱自身造成的,此時的輸出量最小。總體上藥箱藥液晃動三向力有隨加液量和速度的增加而增大的趨勢,但其峰值是隨機出現的。x方向力的峰值出現在噴霧機III擋(4.78km/h)速度行駛,加液量400L的工況下,值為2 025N;y方向力的峰值出現在噴霧機在III擋(4.78km/h)速度,加液量500L的工況下,其值為1 817N;z方向力的峰值出現在噴霧機在III擋(4.78km/h)速度,加液量500L的工況下,其值為-596N。因此,藥箱藥液晃動三向力的最大值出現在x方向,其大小相當于噴霧噴霧機滿載質量的25.3%。圖10為滿載(500L)加液量,III擋(4.78km/h)速度工況的三向力時域數據。
可見,最大載液量和最高速度工況的x方向力最值為1 939N,y方向力最值為1 817N,z方向力最值為-596N。但是,三向力最值出現的時刻不完全一致。對該工況下的三向力數據求合力,有
(6)
其中,Fi為某時刻藥液晃動力(N);F1、F2、F3分別對應藥箱藥液晃動的x方向力、y方向力和z方向力;F0為該時刻合力值(N)。500L加液量,III擋(4.78km/h)速度工況下合力的計算結果如圖11所示。
(a) x方向力
(b) y方向力
(c) z方向力
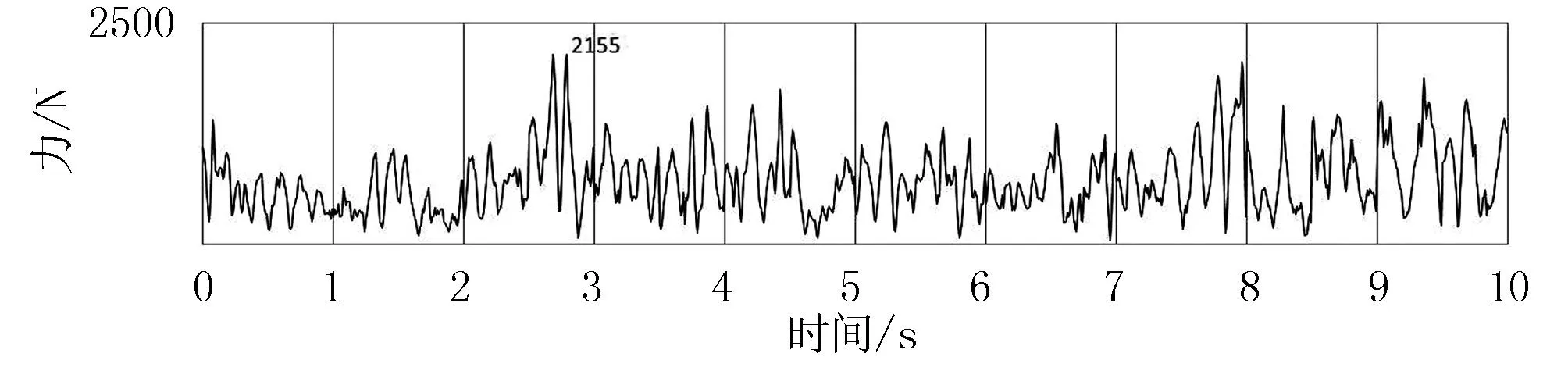
圖11 500L加液量、III擋(4.78km/h)速度下藥箱藥液晃動合力
從藥箱藥液晃動三向力的合力計算結果可知:500L加液量、4.78km/h行駛速度時合力的最大值為2 155N。雖然同一工況下同一次測得的藥箱藥液晃動三向力最值的出現有時刻差別;但是,由于藥箱內藥液的晃動是一個整體連續的過程,藥液在各個方向上的晃動同時發生,可見三向力時域數據中主要的波峰和波谷的出現在相位上是相近的。
4結論
1)設計了一種用于測量噴桿式噴霧機藥箱藥液晃動力的應變式三向力傳感器,并通過田間試驗測得噴霧機藥箱藥液晃動三向力是一種交變載荷。噴霧機藥箱藥液晃動三向力有隨加液量和速度的增加而增大的趨勢,但峰值隨機出現。其最大值為III擋(4.78km/h)速度行駛、加液量400L的工況下的x方向力,幅值為2 025N,相當于噴霧機滿載整機重量的20.3%。
2)500L加液量、III擋(4.78km/h)速度工況下,三向力合力的最大值為2 155N。相同工況下同時測量的藥箱藥液晃動三向力數據最值的出現時刻不完全一致,但各方向力時域數據中主要的波峰和波谷相位接近。
參考文獻:
[1]P K Panigrahy, U K Saha, D Maity. Experimental studies on sloshing behavior due to horizontal movement of liquids in baffled tanks [J].Ocean Engineering,2009,36: 213-222.
[2]Zhou L, Chen Y, Chen F. Stability and chaos of a damped satellite partially filled with liquid[J].Acta Astronautica, 2009, 65(11):1628-1638.
[3]劉奎,康寧.罐車制動時液體晃動的仿真分析[J].北京航空航天大學學報,2009,35(7):1403-1407.
[4]劉奎,康寧.罐車轉向時液體晃動的仿真分析[J].北京航空航天大學學報,2009,35(11):1043-1047.
[5]王云鵬,孫文財,隗海林,等.基于側傾的運輸液態危險化學品的罐式半掛汽車危險狀態辨識[J].吉林大學學報:工學版,2011,40(3):640-644.
[6]Jeon H Y, A R Womac, J Gunn.Sprayer boom dynamic effects on application uniformity[J].Transactions of the Chinese Society of Agricultural Machinery, 2004, 47(3): 647 - 658.
[7]Jan Anthonis, Jorgen Audenaert, Herman Ramon. Design optimization for the vertical suspension of a crop sprayer boom[J].Biosystems Engineering,2005,90 (2):153-160.
[8]屈鐵軍,王獻云,張梅.空冷風機系統運行時豎向擾力試驗研究[J].振動與沖擊,2013,32(10):74-79.
[9]Van NN, Matsuo T, Koumoto T, et al. Transducers for measuring dynamic axle load of farm tractor[J].Bulletin of the Faculty of Agriculture-Saga University (Japan), 2009, 94:23-35.
[10]陳向東,徐宇工,李志敏.基于多物質ALE的列車水箱晃動三維模擬及箱壁動應力研究[J].北京交通大學學報:自然科學版,2011,35(4):142-147.
[11]李生生,朱慶.國產箔式應變片在高速風洞試驗中的應用[J].氣動試驗與測量控制,1987(3):72-76.
[12]陳廣華,鞠娜,楊飛,等.基于粘貼式應變傳感器的車輛超載監測系統[J].北京航空航天大學學報,2011,37(4):409-414.
[13]Phan J V, Hocken R, Smith S T, et al. Simultaneous measurement of spatially separated forces using a dual-cantilever resonance-based touch sensor[J].Review of Scientific Instruments, 2002, 73(2):318-322.
[14]俞志偉,宮俊,吳強,等.小型三維力傳感器的設計和解耦測試研究[J].傳感技術學報,2012,25(1):38-43.
[15]邱白晶,楊寧,徐溪超,等.噴霧機前后輪相繼激勵下噴桿理想運動響應提取[J].農業機械學報,2012,43(2):55-60.
Measuring and Analyzing Liquid-sloshing Three-axis Force of Boom Sprayer
Zhang Andong, Qiu Baijing, Tong Xiang, Cai Yanlun
(Key Laboratory of Modern Agricultural Equipment and Technology, Ministry of Education & Jiangsu Province, Jiangsu University, Zhenjiang 212013, China)
Abstract:To explore the poor handling stability problems of 3WPJ - 500D boom sprayer that reflects in reproduction practice, this paper conduct the exploratory research about the additional force produced by liquid sloshing in a moving sprayer’s tank. In this paper a triaxial forces sensor for measuring liquid-sloshing three-axis force had been developed. Liquid-sloshing three-axis forces are measured in three gears of velocity, six levels of liquid volume of 3WPJ-500D boom sprayer, got the conclusion that the liquid-sloshing three-axis force is a kind of alternating load and it tend to increase with the rise of velocity and liquid volume. The peak value of x-axis force was 2025N which appeared in the condition of 400L liquid load and 4.78km/h running speed. The peak values of y-axis force and y-axis force were 1817N and -596N, respectively. They all happened in the condition of 500L liquid load and 4.78km/h running speed. The resultant force of liquid-sloshing three-axis forces in full load and 4.78km/h speed had been calculated. The maximum value of the resultant force can reach 2155N.The peak values of liquid-sloshing three-axis forces which measured in the same condition at the same time didn’t appear in same temporal points, but their main peaks and valleys had similar phase positions. This research provides basis for the further study of the kinematic and dynamic theories of boom sprayer and offers payload data for the development of innovative boom sprayer.
Key words:boom sprayer; liquid-sloshing three-axis force; triaxial forces sensor; peak value; resultant force
中圖分類號:S491
文獻標識碼:A
文章編號:1003-188X(2016)11-0108-05
作者簡介:張安東(1990-),男,安徽蕪湖人,碩士研究生,(E-mail) 714054949@qq.com。通訊作者:邱白晶(1961-),男,江蘇鎮江人,教授,博士,(E-mail)qbj@ujs.edu.cn。
基金項目:江蘇省農機三新工程項目(NJ2015-02)
收稿日期:2015-10-29