基于ADAMS馬鈴薯收獲機振動篩的運動特性分析
2016-03-23 06:00:15張天會張永華
農機化研究 2016年5期
果 霖,張天會,王 冉,張永華
(云南農業大學 機電工程學院,昆明 650201)
?
基于ADAMS馬鈴薯收獲機振動篩的運動特性分析
果霖,張天會,王冉,張永華
(云南農業大學 機電工程學院,昆明650201)
摘要:馬鈴薯收獲機是馬鈴薯生產過程中一種非常重要的機械,但馬鈴薯收獲機振動篩的運動規律復雜,經常發生傷薯問題。為此,以某型號馬鈴薯收獲機多桿機構的振動篩為研究對象,利用Creo建立了振動篩的參數化模型,并利用ADAMS對振動篩的運動特性進行了分析。通過分析得到振動篩的振幅范圍5.5~31.8mm略微超出了最佳范圍10~30mm;速度范圍105.5~535.2mm/s符合小于600mm/s的最佳要求;加速度范圍0.7~18.7mm/s2,其最小值小于最佳取值范圍2.5~20mm/s2的下界。利用ADAMS可以準確高效地得到振動篩的運動特性,為振動篩的優化設計提供了理論依據。
關鍵詞:馬鈴薯收獲機;振動篩;ADAMS;運動特性
0引言
馬鈴薯以其適應性強、產值高、營養豐富等特點,在我國得到了越來越廣泛的推廣和種植,在國內的消費量也以平均每年8%的速度增長[1]。在馬鈴薯大量種植過程中,需要有多種相應的機械進行作業,馬鈴薯收獲機就是其中一種。我國馬鈴薯收獲機起步比較晚,雖然發展較快,但是還存在多種問題[2]。振動篩是影響馬鈴薯收獲機收獲質量最重要的機構之一,馬鈴薯常常在振動篩的速度大小、方向突變區及抖動加速強烈區受傷[3]。
馬鈴薯震動篩多采用四桿機構或多桿機構。多桿機構可以提高馬鈴薯的分離質量,但其運動特性的分析過程復雜,很大程度上增加了產品研發周期和成本,很難使產品達到最佳效果。
本文針對馬鈴薯在振動篩抖動運輸的過程中容易受傷的問題,以某型號馬鈴薯收獲機多桿機構的振動篩為對象,利用參數化建模軟件Creo建立振動篩的三維模型,并利用ADAMS分析振動篩的振幅、加速度等運動特性。
1振動篩模型
本文研究的馬鈴薯振動篩是由多個連接桿構成的,是一個典型的多桿機構,如圖1所示。其中,前掛桿的兩端分別與篩架和機架鉸接在一起,后掛桿的兩端分別與機架和上連桿鉸接在一起,上連桿的兩端分別與篩架和驅動搖桿鉸接在一起,驅動搖桿鉸接在機架的一端。振動篩工作時,機架與馬鈴薯收獲機保持相對靜止,外部動力帶動驅動搖桿轉動,進而帶動篩架和篩條做周期運動。
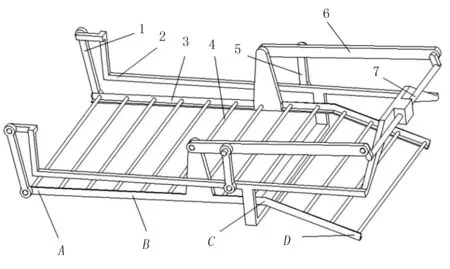
1.前掛桿 2.機架 3.篩架 4.篩條 5.后掛桿
2ADAMS運動分析
2.1ADAMS運動方程
在ADAMS內的每一個構件都與其他的構件通過運動副進行連接,這些運動就構成了運動分析的代數方程。假設運動副構成的約束方程的個數為nh,則用系統廣義坐標矢量表示的運動學約束方程組為[4]
(1)
穩定的機械系統的自由度為0,故施加自由度為0的約束,有
ΦD(q,t)=0
(2)
聯立式(1)和式(2)可得
(3)
對式(3)進行求導,并令Φt(q,t)=-v ,即可得到速度方程為
(4)

(5)
其中,q為廣義坐標系列陣;q、v為廣義速度陣列;Φ為描述完整約束的代數方程陣列。
2.2分析設置
根據馬鈴薯振動篩的形狀及大小,利用Creo參數化建模軟件,建立振動篩的參數化模型,將模型保存成*.x_t格式的文件[5],并將模型導入到ADAMS中。
模型的所有構件都是通過運動副連接起來的,且振動篩的機架與馬鈴薯收獲機保持相對靜止,所以按照振動篩的實際狀況,在所有構件鉸接的位置施加轉動副約束,并利用固定約束將機架與大地固定在一起[6]。整個振動篩模型中含有13個轉動副約束和1個固定約束。本文只研究振動篩的運動特性,所以不需要對振動篩各個構件的質量及材料等參數進行設定。
馬鈴薯振動篩的額定工作轉速為383r/min,在振動篩的驅動搖桿上施加一個大小為383r/min的驅動轉動。
施加完相關運動副約束和轉動驅動后的振動篩模型如圖2所示。
為了分析振動篩的運動特性,在振動篩的篩架上建立4個標記點作為測量點,分別為A、B、C、D。其中,B點位于振動篩的質心位置,測量點的位置如圖1所示。
2.3求解設置
模型運動時間的長短和數據點的多少可以通過設置求解的時間和求解的步數來控制。振動篩的轉速為267r/min,為了觀察兩個完成周期的運動特性,這里將求解時間設置為0.45s,并將求解步數設置為300。
3求解結果
經過計算求解之后,進入ADAMS后處理模塊,利用后處理模塊將ADAMS的計算結果轉化為特性曲線的形式,用曲線表示馬鈴薯振動篩各個測量點的運動特性,根據處理得到4個測量點的運動特性曲線。分析得到振動篩的運動特性的相關數據,如表1所示。
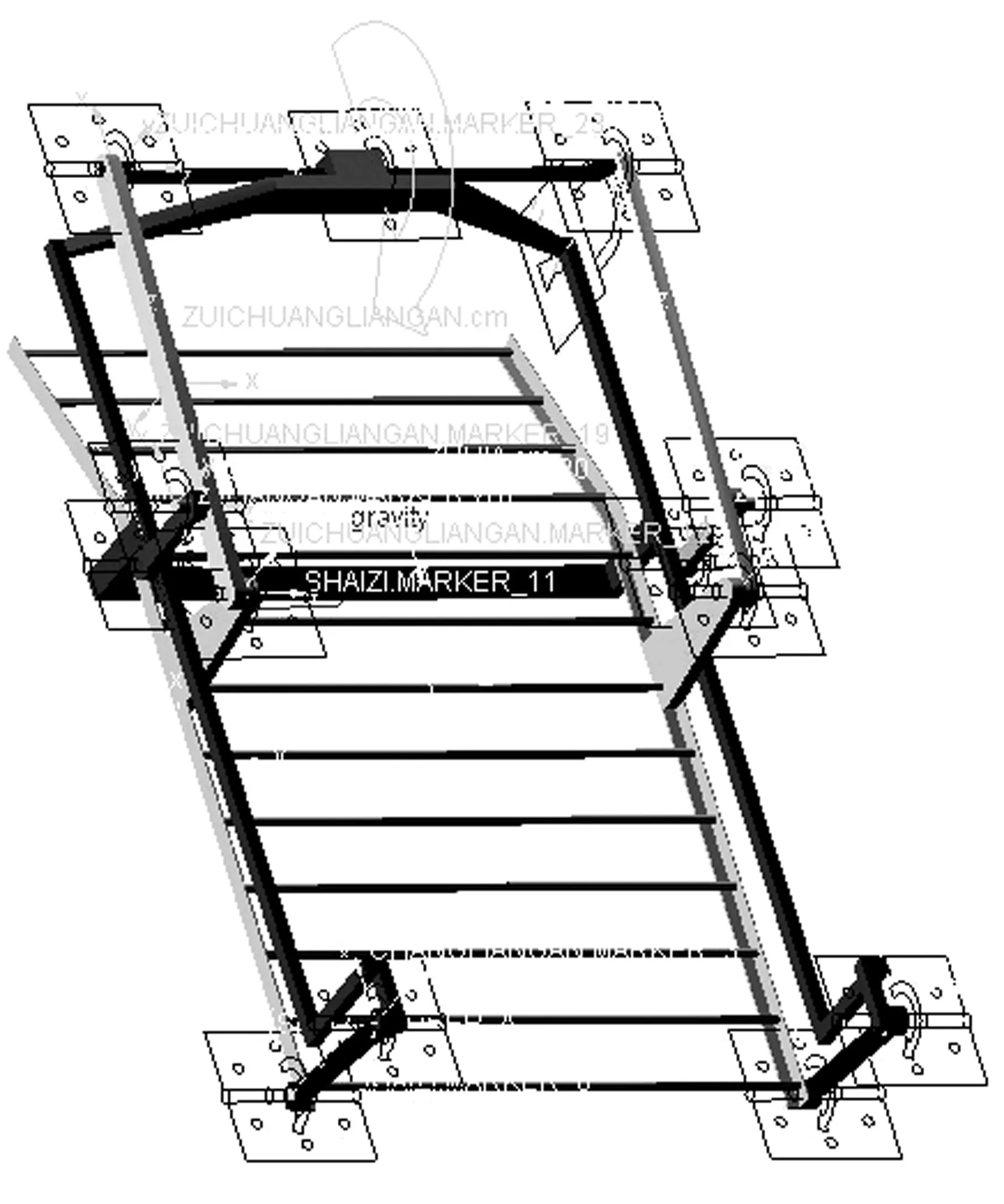
圖2 振動篩模型約束
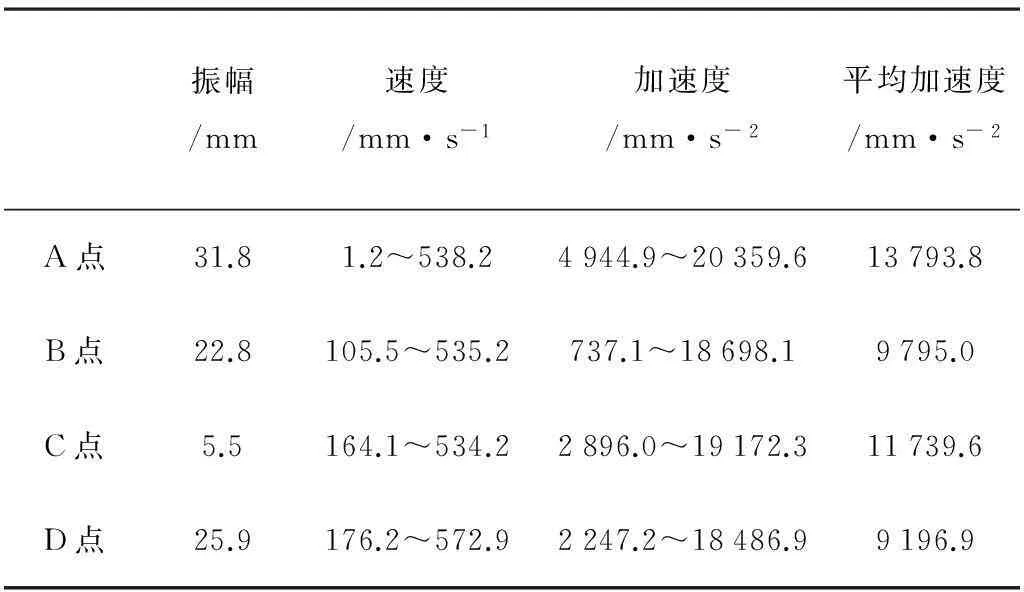
振幅/mm速度/mm·s-1加速度/mm·s-2平均加速度/mm·s-2A點31.81.2~538.24944.9~20359.613793.8B點22.8105.5~535.2737.1~18698.19795.0C點5.5164.1~534.22896.0~19172.311739.6D點25.9176.2~572.92247.2~18486.99196.9
圖3是馬鈴薯振動篩4個測量點位移曲線。由圖3可以看出:曲線A和曲線B的波峰和波谷出現的時間相同,曲線C和曲線D的波峰和波谷出現的時間相同,曲線A和曲線D的波峰和波谷出現的時間相差半個運動周期;振幅最大的點為A點,最大值為31.8mm,最小的振幅為5.5mm,振動篩質心B點振幅為22.7mm,理論研究和試驗結果表明,尾部振動篩最佳的振幅范圍為10~30mm[7],A點和C點的振幅略偏離最佳振動范圍。
圖4是篩面上各個測量點在x方向的位移曲線。由圖4可以看出:篩面從前到后各點在x方向的位移不斷增大,使得篩子后端的物體可以很好地被拋出機體。
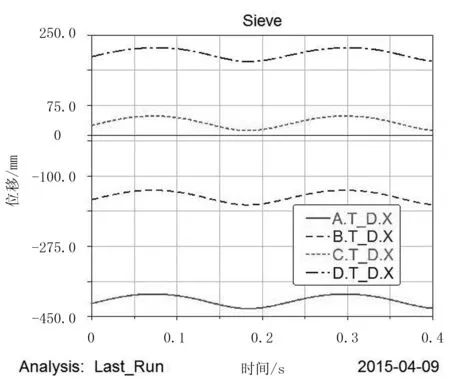
圖4 曬面各點在x方向的位移曲線
圖5是馬鈴薯振動篩4個測量點的速度曲線。從圖5可以看出:B點、C點、D點的速度曲線基本一致,質心B點的運動速度范圍為105.5~535.2mm/s;而在馬鈴薯塊莖不脫離振動篩的的條件下,振動篩質心的運動速度應小于600mm/s[7],符合最佳分離要求。
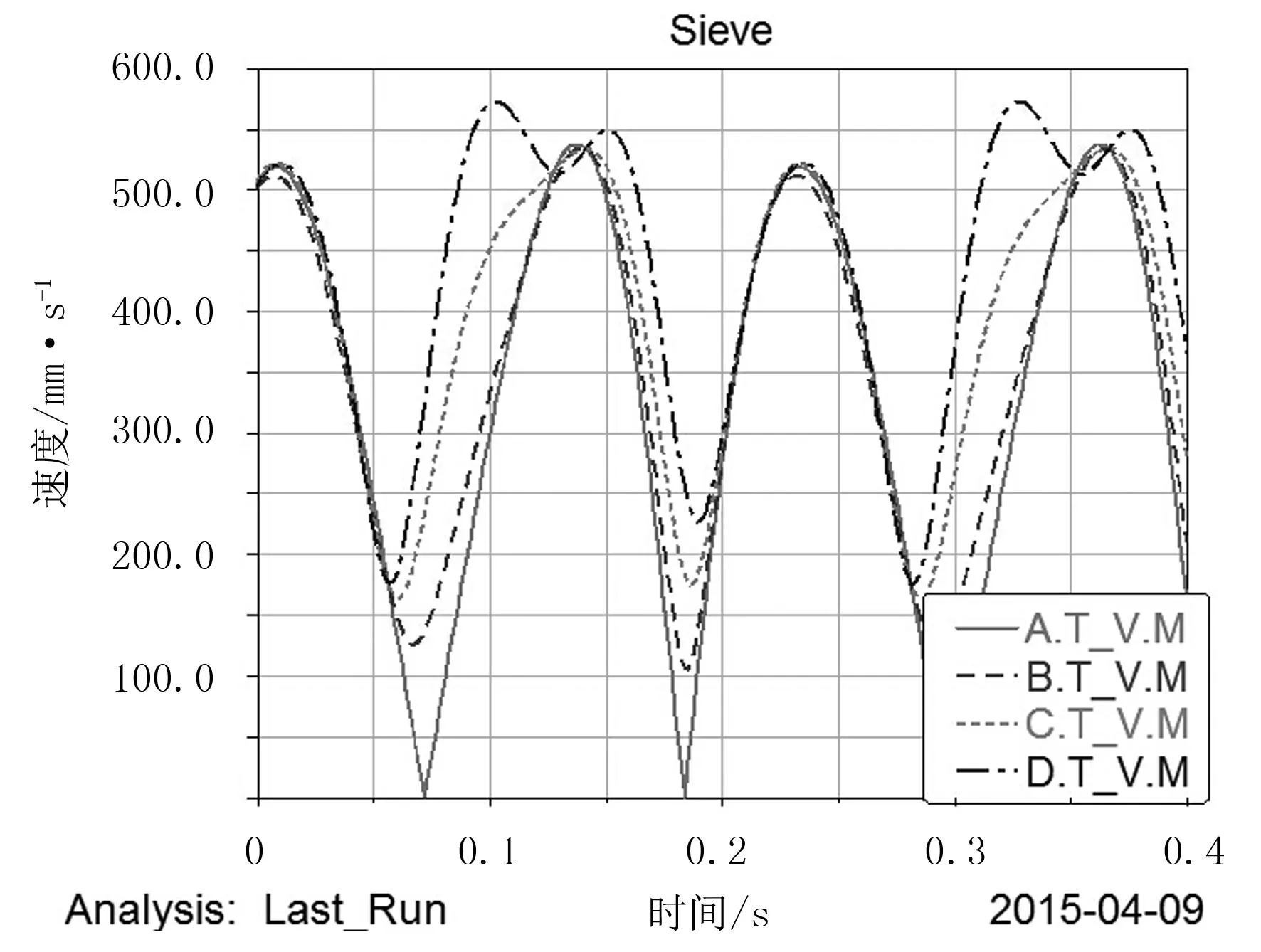
圖5 合成速度曲線
圖6是馬鈴薯振蕩篩質心B點x、z方向的速度分量。
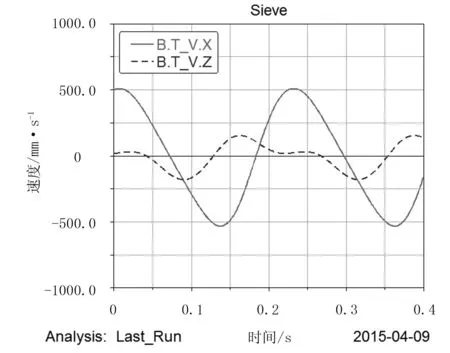
圖6 質心B點x、z方向的速度分量曲線
由圖6可以看出:B點x方向的速度分量和z方向的速度分量的波峰和波谷沒有重合;B點x方向的速度分量的最大值小于510mm/s,不會發生傷薯問題[7]。
圖7是馬鈴薯振動篩4個測量點的加速度曲線。由圖7可以看出:質心位置B點的加速度范圍是0.7~18.7mm/s2,而在馬鈴薯塊莖不脫離振動篩的條件下,振動篩質心的運動加速度范圍是2.5~20mm/s2[7],點B的最小加速度低于最佳范圍的下界。
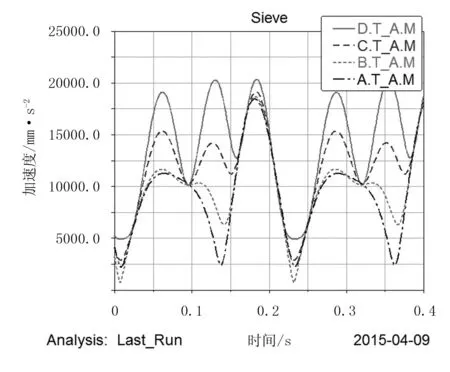
圖7 合成加速度曲線
4結論
1)所分析的馬鈴薯振動篩的振幅最大值為31.8mm,最小值5.5mm,振幅范圍偏出了理論最佳振幅范圍10~30mm,應當進行適當的優化設計。
2)所分析的馬鈴薯振動篩質心的速度范圍是105.5~535.2mm/s,符合運動速度小于600mm/s的最佳值;所分析的馬鈴薯振動篩質心的加速度范圍是0.7~18.7mm/s2,其最小值小于最佳取值范圍2.5~20mm/s2的下界。
3)在對馬鈴薯振動篩運動特性分析的過程中,應用Creo建立了振動篩的參數化模型,并利用ADAMS對振動篩的振幅、速度等特性進行分析,得到了振動篩運動時的參數,為檢驗振動篩的工作性能提供了依據,也為振動篩的優化設計提供了數據支持。
參考文獻:
[1]史明明,魏宏安,劉星,等.國內外馬鈴薯收獲機械發展現狀[J].農機化研究,2013,35(10):213-217.
[2]宋言明,王芬娥.國內外馬鈴薯機械的發展概況[J].農機化研究,2008(9):224-227.
[3]劉寶,張東興,李晶.馬鈴薯收獲機主要問題機理分析及其對策[J].農機化研究,2009,31(1):14-16.
[4]韓興,李昌,于曉光,等.基于ADAMS/View明弧焊接機器人運動仿真分析[J].焊接學報,2013(4):69-72.
[5]郝雙雙,李陽星,劉訓濤,等.基于ADAMS的帶式輸送機實體仿真模型建立方法[J].煤礦機械,2008,29(2):178-180.
[6]楊莉.馬鈴薯挖掘機擺動分離篩的仿真與參數優化[D].呼和浩特:內蒙古農業大學,2009:17-21.
[7]賈晶霞.馬鈴薯收獲機關鍵部件設計與試驗研究[D].北京:中國農業大學,2006:66-70.
Kinematics Analysis on Potato Harvester Vibration Sieve Based on ADAMS
Guo Lin, Zhang Tianhui, Wang Ran, Zhang Yonghua
(College of Mechanical and Electrical Engineering,Yunnan Agricultural University,Kunming 650201,China)
Abstract:Potato harvester is a kind of very important machinery in potato production,but the movement of the potato harvester’s vibration sieve is complex and vibration sieve offer damage potato. This article takes a type of potato harvester’s vibration sieve as the research object.The simplified 3D model of the vibration sieve was built by Creo,and analyzed the motion characteristics of vibrating sieve by ADAMS.The analysis results show that the amplitude range which is 5.5mm~31.8mm is bigger than the optimum range which is 10~30mm;the speed range which is 105.5~535.2mm/s is in accordance with the best standard which is samller than 600mm/s; the acceleration range is 0.7~18.7mm/s2,the smallest acceleration is out of the optimum range which is 2.5~20mm/s2. ADAMS can be used to accurately obtain the motion characteristics of vibrating screen, and provides the theoretical basis for the acceptance and optimization design of vibrating sieve.
Key words:potato harvester; vibration sieve; ADAMS; motion analysis
文章編號:1003-188X(2016)05-0024-04
中圖分類號:S225.7+1
文獻標識碼:A
作者簡介:果霖(1986-),男,昆明人,講師,碩士,(E-mail)1265120@qq.com。通訊作者:張永華(1974-),男,云南曲靖人,講師,碩士。
基金項目:云南省應用基礎研究項目(2013FD021);云南省教育廳基金項目(2014Y188)
收稿日期:2015-04-24
