基于多信道路由控制的精量播種機優化設計
2016-03-23 06:00:25鄭仕勇覃德澤鮑秀蘭
農機化研究 2016年5期
鄭仕勇,朱 強,覃德澤,鮑秀蘭
(1.賀州學院 計算機科學與信息工程學院,廣西 賀州 452899;2.中原工學院 信息商務學院,鄭州 450007;3.華中農業大學,武漢 430070)
?
基于多信道路由控制的精量播種機優化設計
鄭仕勇1,朱強2,覃德澤1,鮑秀蘭3
(1.賀州學院 計算機科學與信息工程學院,廣西 賀州452899;2.中原工學院 信息商務學院,鄭州450007;3.華中農業大學,武漢430070)
摘要:為了提高花生播種機播種的質量及作業效率,在花生引播機的路徑和排種器的控制系統中,引入了多信道獨立通信原理,降低了播種過程的漏種率;利用模糊神經網絡控制原理,結合模糊域對花生播種機的結構進行了非線性優化設計。為了驗證設計的花生精量播種機結構和控制系統的可靠性,對花生播種機進行了田間試驗,結果表明:多信道路由花生播種機的合格率要明顯高于傳統的播種機,重播率要明顯低于傳統的播種機,破碎率和空穴率都比較低。這說明播種機的路徑選擇和排種器的控制都達到了最優,為花生播種機的研究和設計提供了理論依據。
關鍵詞:精量播種;模糊控制;播種質量;神經網絡;排種器;多路由
0引言
播種機在農業生產中是非常關鍵的,為了配合農作物的生長時間,必須在較短的時間內進行播種,精量播種機可以根據農業生產的要求,將種子播種到土地里,使作物良好的生長。播種的質量好壞直接關系到作物的出苗和成長,因此對作物的產量影響很大。由于精密播種機可以保證種子在田間得到最合理的生長環境、播種質量高、株距均勻、播種深度可以調節,為作物的生長發育創造了良好的條件,不僅可以節省大量的種子,而且提高了作物的產量。為了提高播種機播種速度及播種精度,本文依據模糊控制神經網絡原理對排種器的結構進行優化,使用多路多信道控制對花生引播機和排種器進行聯合控制,大大提高了播種的效率,提高了播種的質量。
1花生精良播種機總體設計
隨著現代農業科學技術的發展,傳統農業的生產方式發生了巨大的變化,而這些變化中最主要的就是播種方式的改變,各種各樣現代化、自動化的播種方式,極大地提高了播種的效率和播種質量。
圖1為花生播種機的總體優化設計流程。由圖1可以看出:花生播種器的總體設計主要包括排種器類型的設計及排障器結構的優化(見圖2),在排種器和引播機的控制中使用多路由多信道控制,最后通過模糊神經網絡調節,對模型進行優化。
排種器傾斜角度的優化是通過模糊神經網絡控制來實現的,通過神經網絡學習算法,降低初始傾斜角度的射擊誤差,從而得到初始傾斜的設計角度。
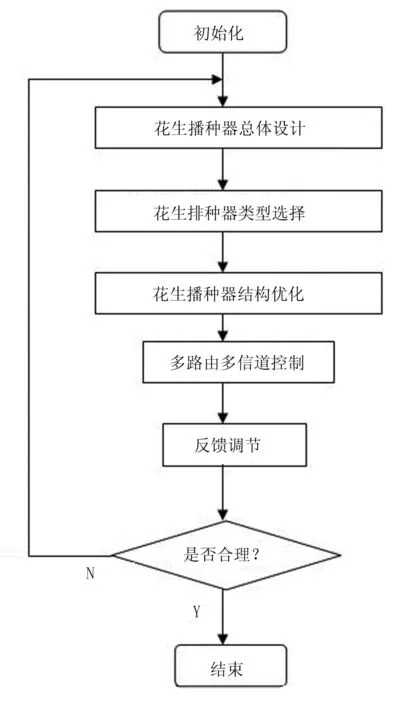
圖1 花生播種機總體優化設計
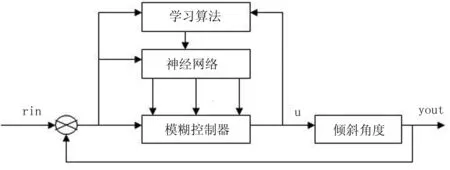
圖2 排種器結構優化設計
2花生引播機機械結構設計
播種機的主要功用性評價是利用一定的株距或者播量,將種子以一定的深度播種到土壤里,然后覆土,通過施肥、噴灑農藥和鋤草等操作,為種子的生長提供較好的條件,從而提高糧食的產量。
圖3為播種中耕通用機,其引播裝置為動力機械,主要環節是排種器的設計。排種器和引播機械通過獨立信道控制,實現了多路由多路徑的精密播種控制。排種器主要分為兩類:一是立式圓盤排種器;二是傾斜圓盤碟式排種器。立式圓盤排種器如圖4所示。
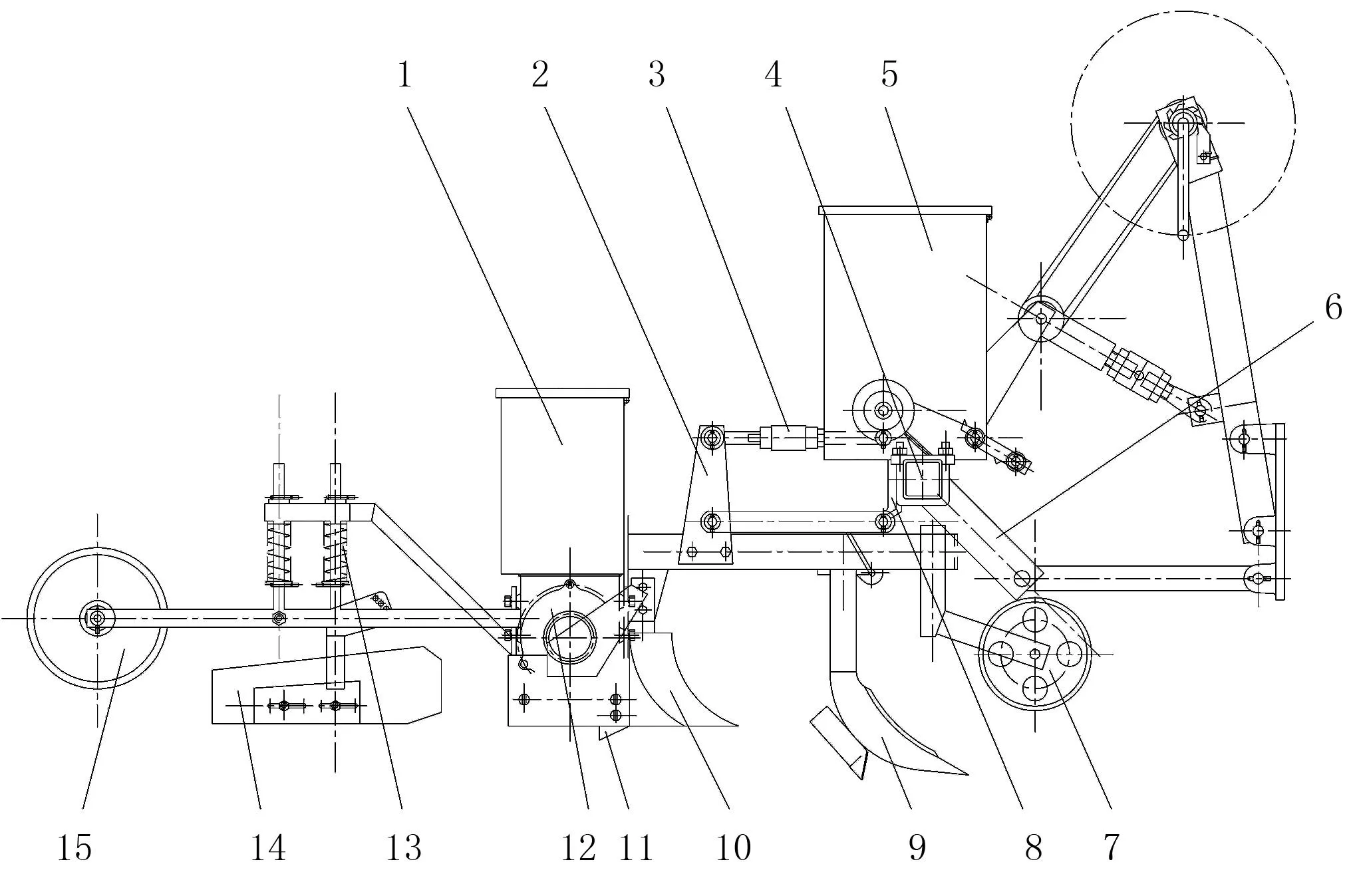
1.種箱 2.后支臂 3.仿形機構 4.主梁 5.肥箱 6.下懸掛點
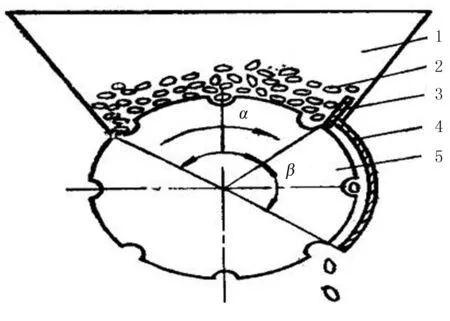
1.種箱 2.種子 3.清種板 4.護種板 5.立式圓盤
如圖4所示,圓盤的安裝方式采用和地輪一根軸式的安裝,種子首先經過圓盤的孔,然后隨著圓盤一起旋轉,多余的種子會被刮種板去掉。在護種板的作用下,種子受到自身重力的作用,投入到種溝中,完成排種作業。
圖5為傾斜圓盤碟式排種器,主分為殼體式和箱式。如圖1所示排種器工作時,驅動軸通過錐齒輪將動力傳遞到分種碟,分種碟隨之轉動; 位于種箱下部充種區的種子滑入由分種匙和隔板斜交形成的持種空間,隨著分種碟旋轉運動,種子由分種匙向上托起。
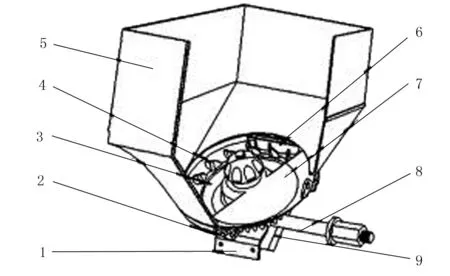
1.固定支架 2.殼體 3.分種碟 4.分種匙 5.種箱
如圖6所示,持種空間的體積取決于分種匙頂部的厚度Hs、寬度Bs、斜圓柱半徑Rs和圓柱面相對于隔板傾斜角度s,確定合理的分種匙結構參數是保證播種質量的充分條件。
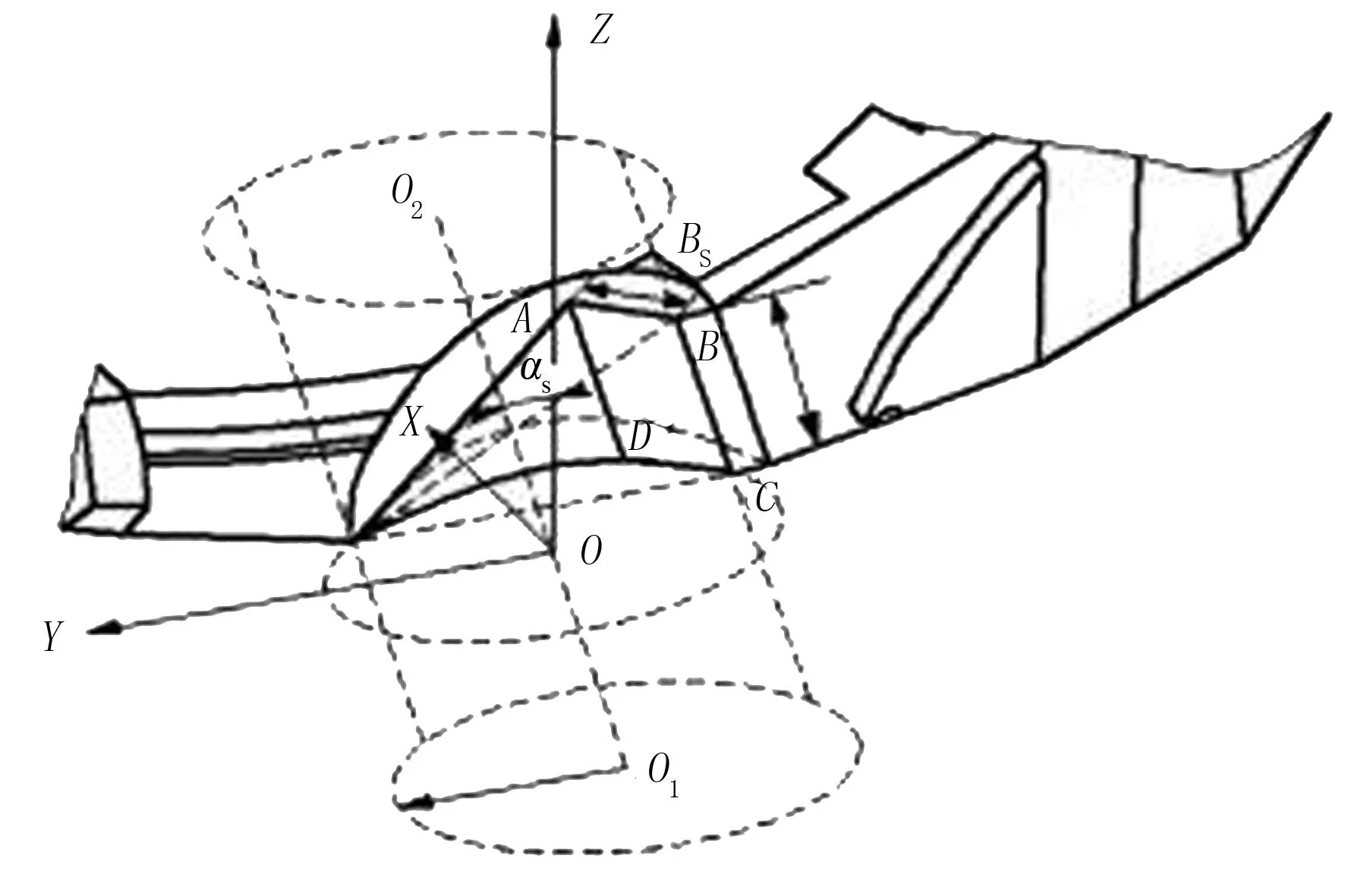
圖6 分種匙的結構
圖7表示清種過程的受力,由力的分布可以建立各個力之間的平衡關系。其主要表達式為
(mgcosβcosθ1+mω2R)cosα+mgsinβsinα-N=0
(1)
其中,m表示種子質量;g表示重力加速度;α表示導種平面角;β表示傾斜角度;ω表示角速度;R表示分種碟半徑。在臨界條件下,N為0,則表達式可以寫成
(mgcosβcosθ1+mω2R)cosα+mgsinβsinα=0
(2)
由此可以得到清種的初始角度為
(3)
影響排種器性能的好壞主要取決于分種碟轉速、傾斜角度及分種碟半徑。為了優化結構設計,需要對初始傾斜角度進行優化設計,本文采用模糊神經網絡優化算法對初始傾斜角度進行優化設計。設計網絡的結構如圖8所示。
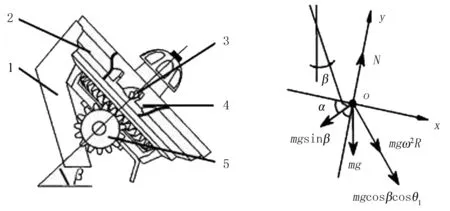
1.導種管 2.隔板 3.花生 4.分種碟 5.驅動齒輪
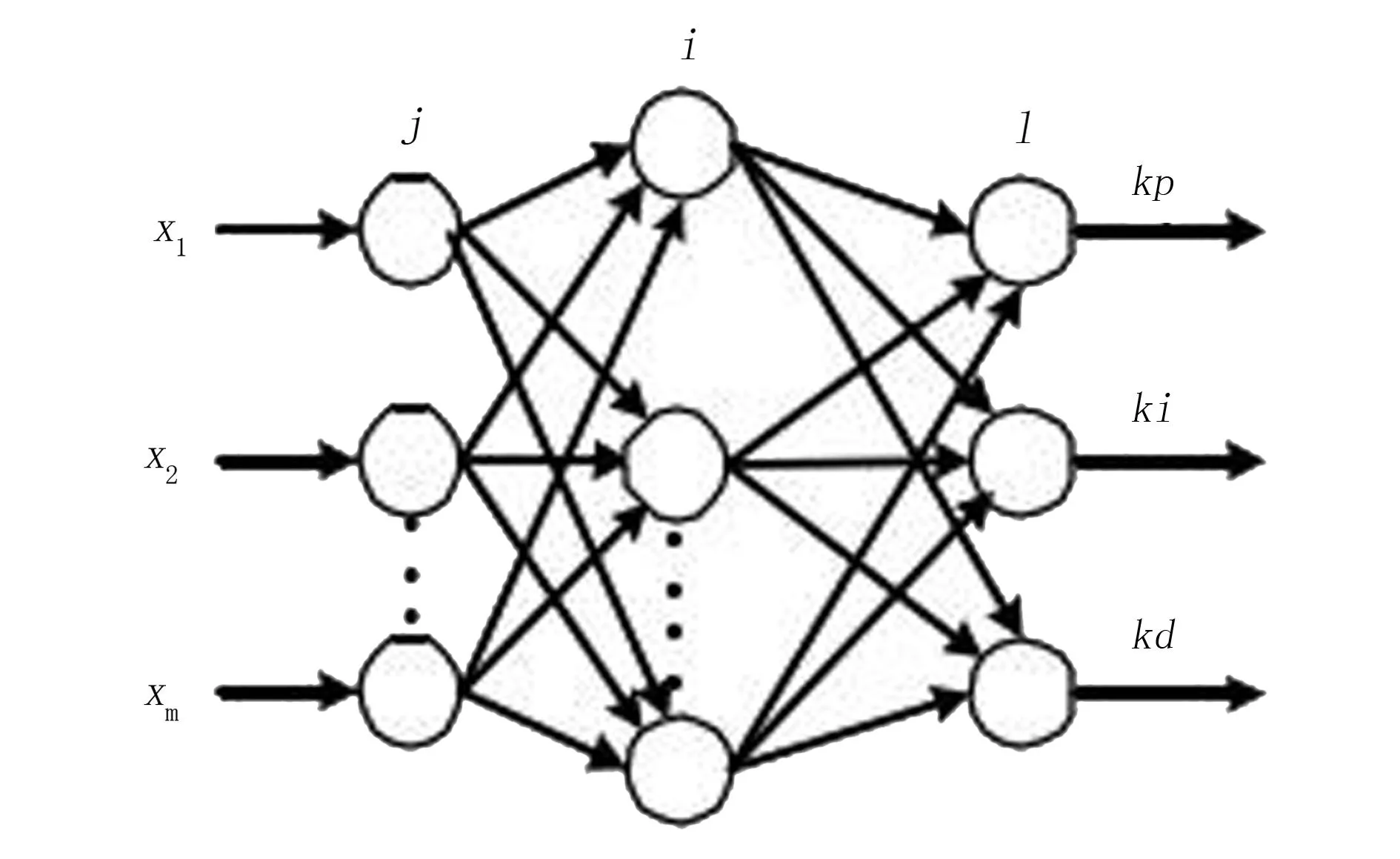
圖8 神經網絡結構圖
神經網絡結構主要有3個層次構成,包括輸入層、神經網絡算法推理計算層和輸出層,結合模糊域可以對清種粒進行非線性優化設計。對初始傾斜角度誤差E、誤差變化率EC、控制量U的模糊集合及論域定義如下:E、EC和U的集合均為{NB、NM、NS、0、PS、PM、PB}隸屬度函數均為三角函數,如圖9所示。
按照圖9的設置,可以繼續分別設置變量初始傾斜角度的隸屬度函數、變量U的隸屬函數,通過模糊控制優化可以得到如圖10所示的殘差計算曲線。
圖10表示利用模糊BP神經網絡對結構進行優化后得到的誤差曲線,利用MatLab模糊神經網絡計算可以得到初始傾斜角度的數據,根據數據可以對結構進行優化設計。
3多信道路由花生精量播種機測試
為了驗證設計的多信道路由花生精量播種機的播種效果,設計了播種機的播種試驗,分別采用獨立信道路由對播種機的路徑和排種裝置進行控制,裝置如圖11所示。
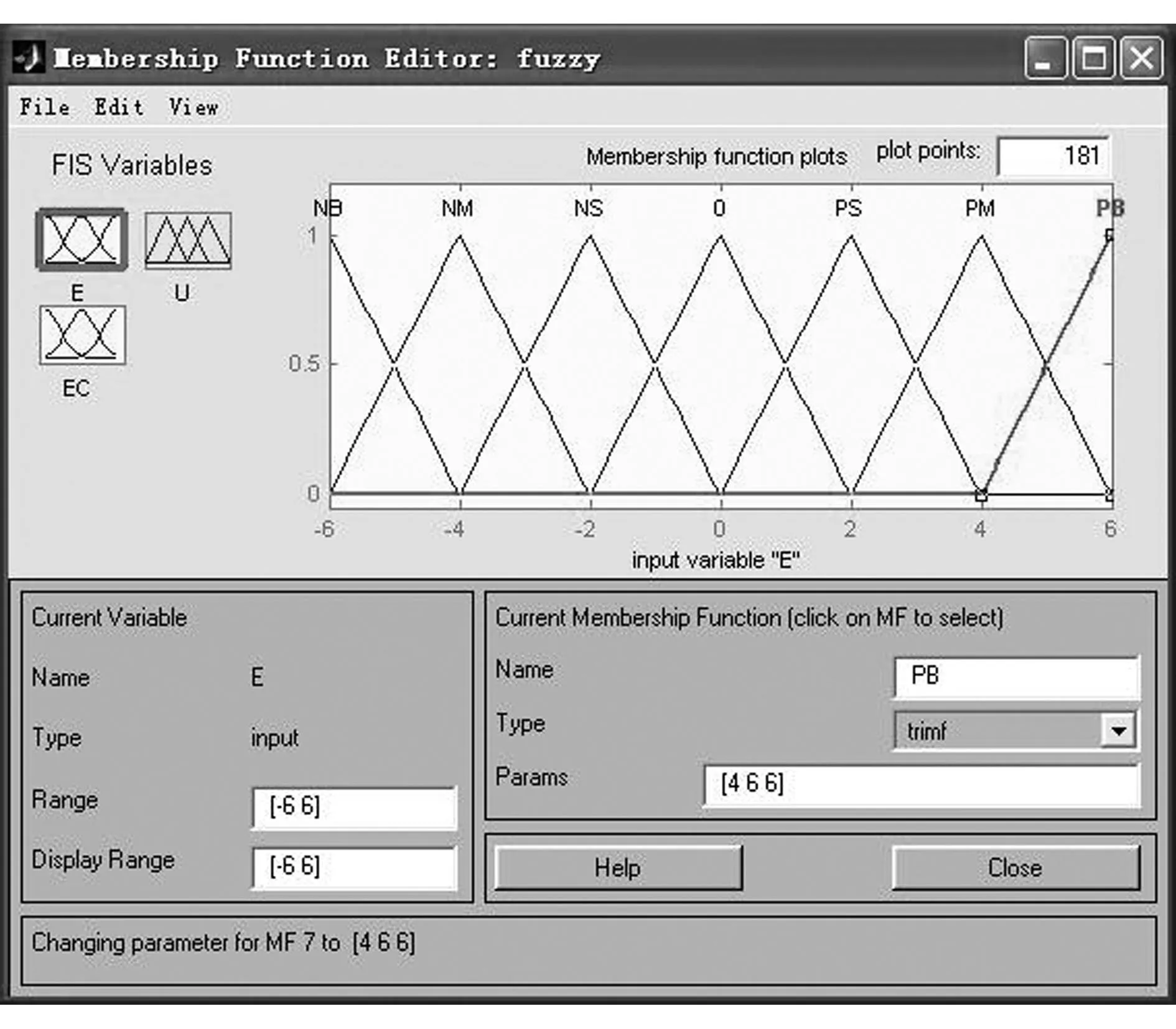
圖9 變量E的隸屬度函數
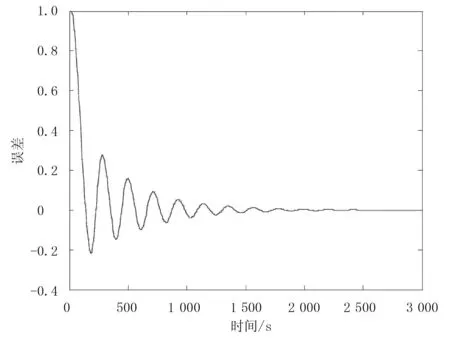
圖10 Matlab計算誤差曲線

圖11 花生精量播種機示意圖
為了驗證播種機的播種效果,以穴粒數合格率、重播率、破碎率及空穴率作為試驗指標,其統計計算公式分別如下:
穴粒數合格率為
(4)
重播率為
(5)
破碎率為
(6)
空穴率為
(7)
其中,T表示實驗過程中總的播種穴數;n1表示具有2個籽粒的穴的個數;n2表示具有3個籽粒的穴的個數;n3表示具有破碎籽粒的穴的個數;n4表示具有空穴籽粒的穴的個數。圖12為使用傳統花生播種機和多信道路由控制花生播種機進行試驗得到的合格率對比曲線。由圖12可以看出:隨著試驗測試的增加,兩種機械的試驗結果都比較穩定,說明試驗數據的有效性。由曲線可以看出:多信道路由花生播種機的合格率要明顯高于傳統的播種機,從而驗證了多信道路由控制花生播種機的有效性和可靠性。
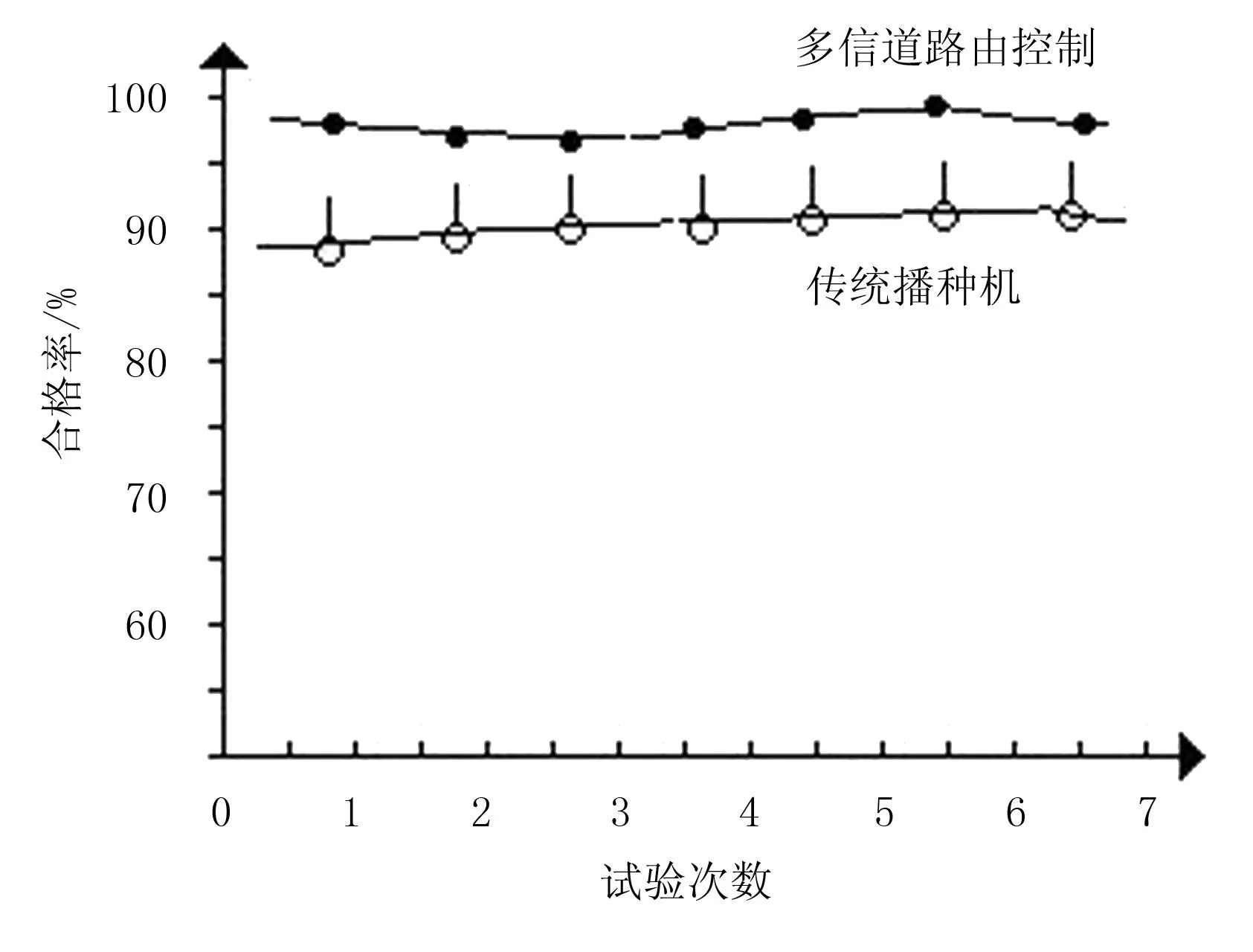
圖12 合格率對比曲線
圖13為使用傳統花生播種機和多信道路由控制花生播種機進行試驗得到的重播率對比曲線。由圖13可以看出:多信道路由花生播種機的重播率要明顯低于傳統的播種機。這是由于在多信道路由聯合控制下,播種的路徑和排種器的精度都得到了控制,從而使播種機的效果達到了最優。
表1表示多信道路由控制花生精量播種機播種過程破碎率和空穴率的實驗結果。由表1可以看出:該裝置的破碎率和空穴率都比較低,這說明播種機的路徑選擇和排種器的控制都達到了最優,從而驗證了設計的播種機械的可靠性。
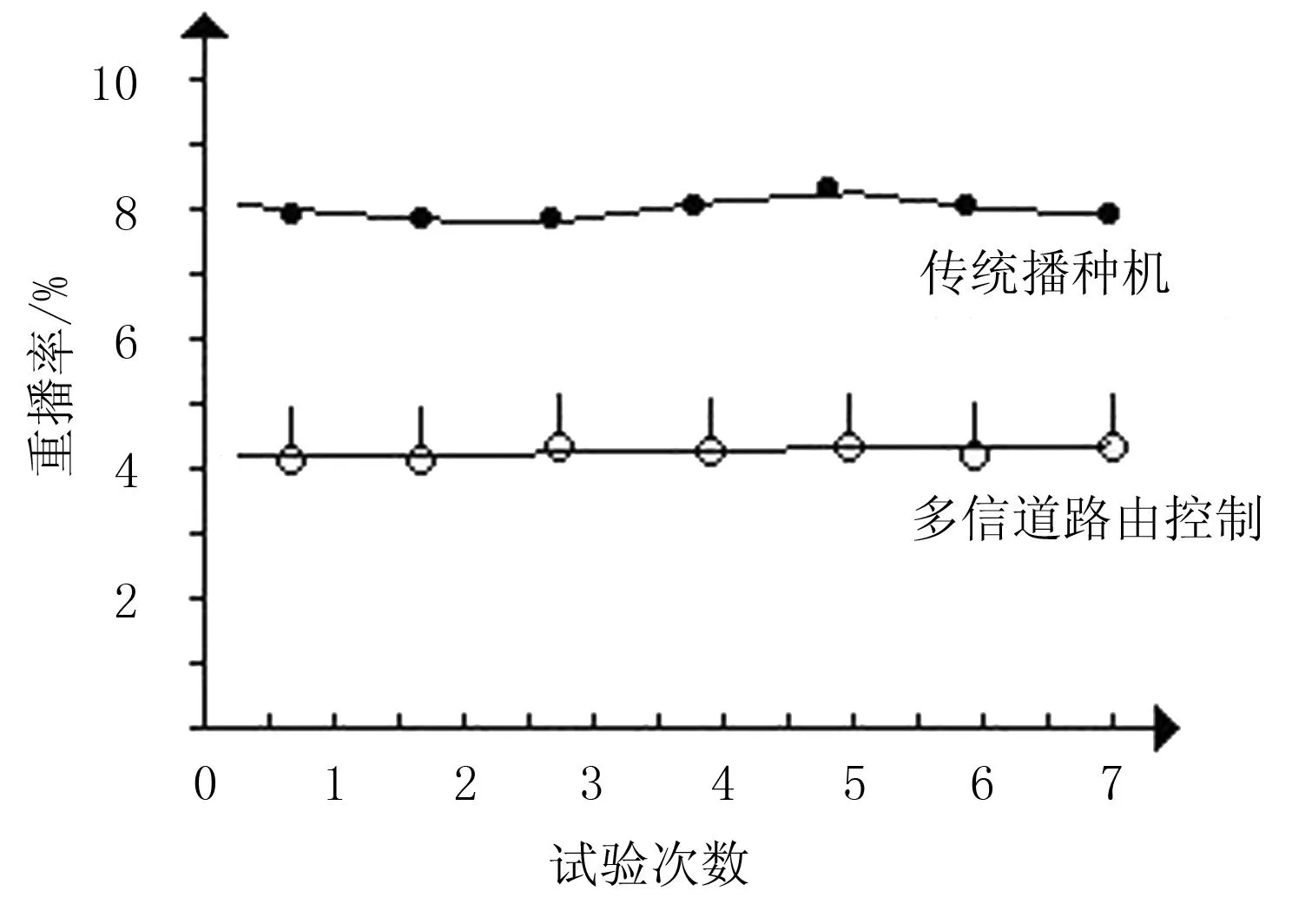
圖13 重播率隨實驗次數變化曲線
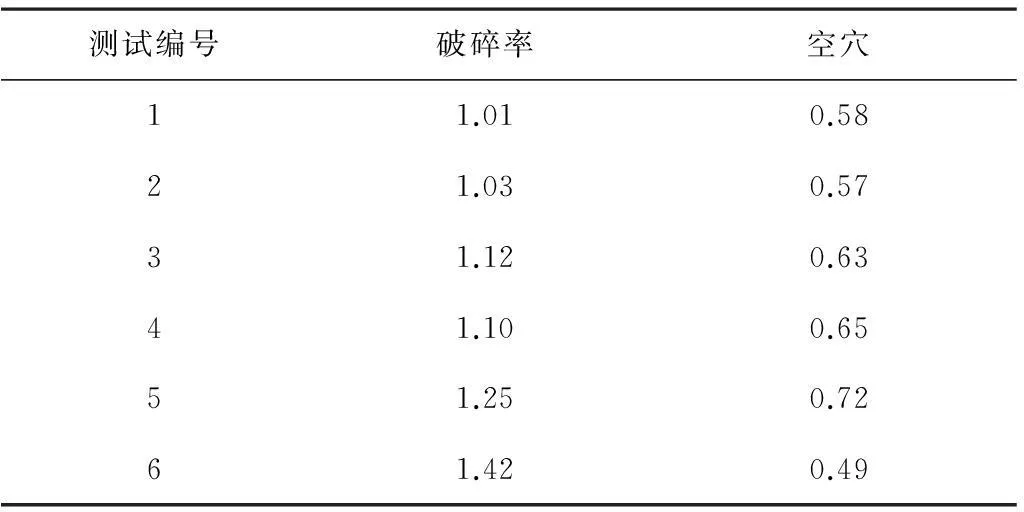
%
4結論
1)為了提高花生播種的質量,提高播種機械的作業效率,在播種路徑和控制系統中,使用了多路由多信道控制原理,從而大大降低了播種機的漏播率;采用了模糊神經控制方法對排種器的結構進行了優化設計,對播種器傾斜角度進行了神經網絡優化設計,提高了播種器結構的優化效果。
2)為了驗證裝置的有效性和可靠性,通過田間試驗的方法對裝置進行了驗證。通過驗證發現,該播種器機的合格率要明顯高于傳統的播種機,并且具有重播率低、破碎低和空穴率低等優點。
3)本文設計的花生播種器可以優化的地方還有很多,比如控制系統的優化及路徑優化等等,在今后的設計中,還需要加入更多的優化因素,使該播種機的適應性更強,應用范圍更廣。
參考文獻:
[1]顧峰瑋,胡志超,王海鷗,等.鴨嘴滾輪式花生播種器設計與運動軌跡[J].中國農機化,2010(4):60-63.
[2]劉仕昌,陳鵬,徐平.小型畜力花生播種機的設計[J].中國農機化,2013,34(2):70-72.
[3]呂小蓮,劉敏基,王海鷗,等.花生膜上播種技術及其設備研發進展[J].中國農機化,2012(1):89-92.
[4]李國林,宋煒,毛俐,等.國內外幾種主要排種器的特點[J].農業科技與裝備,2011(8):70-73.
[5]何波,李成華,張家峰.傾斜圓盤勺式精密排種器充種過程的種子運動分析[J].沈陽農業大學學報,2009,40(2):234-236.
[6]李成華,夏建滿,何波.傾斜圓盤勺式精密排種器投種過程分析[J].農業機械學報,2005,36(3):48-50.
[7]徐祝欣,田立忠,尚書旗,等.2BFD-4型花生覆膜播種機的設計與試驗[J].農業工程學報,2012,28(增刊2):13-17.
[8]張智猛,胡文廣.中國花生生產的發展與優勢分析[J].花生學報,2005,34(3):6-10.
[9]周瑞寶.中國花生生產加工產業現狀及發展建議[J].中國油脂,2005(2):79-82.
[10]王盛玉.花生生產全程機械化技術應用[J].農機科技推廣,2007(3):22-25.
[11]崔清亮,秦剛,王明富.幾種典型的精密排種器的對比分析[J].山西農業大學學報,2003(1):69-71.
[12]李亞芹,夏峰.我國發展精準農業的必要性[J].農機化研究,2006(6):4-6.
[13]高煥文,李問盈,李洪文.中國特色保護性耕作技術[J].農業工程學報,2003,19(3):1-4.
[14]王晉生,王桂英.小麥機械化播種實踐[J].農業技術與裝備,2009(9):21-22.
[15]劉蘊賢,倪道明,李從華,等.不同施肥方法對水稻生長及稻田周圍水體污染的影響[J].天津農業科學,2007,13(1):31-34.
[16]吳子岳,高煥文,張晉國.玉米秸稈切斷速度和切斷功耗的試驗研究[J].農業機械學報,2002,32(2):38-41.
[17]何偉,陳彬,張玲.DSP/BIOS 在基于DM642的視頻圖像處理中的應用[J].信息與電子工程, 2006, 4(1): 60-62.
[18]龔菲,王永驥.基于神經網絡的PID參數自整定與實時控制[J].華中科技大學學報:自然科學版,2002,30(10):298-305.
[19]趙望達,魯五一,徐志勝,等.PID控制器及其智能化方法探討[J].化工自動化及儀表,1999,26(6):45-48.
[20]谷傳綱,閻防,王彤.采用改進的BP神經網絡預測離心通風機性能的研究[J].西安交通大學學報,1999,33(3):43-47.
[21]郭艷兵,齊古慶,王雪光.一種改進的BP網絡學習算法[J].自動化技術與應用,2002,26(2):13-14.
[22]趙星星,羅克露.嵌入式實時操作系統移植技術的研究與應用[J].計算機工程,2007,33(17):90-92.
[23]馬德新,徐鵬民.實時操作系統pC/OS-11調度算法的研究[J].微計算機信息,2007,23(6):73-74.
[24]楊超,張冬泉,趙慶志.基于S曲線的步進電機加減速的控制[J].機電工程,2011,28(7):813-817.
[25]浦艷敏.關于數控系統加減速控制的研究[J].科學技術與工程,2009,9(22):6782-6785.
[26]張航偉,陳嬋娟.開放式數控系統中數控代碼的解釋與編譯[J].機械設計與制造,2011(2):147-148.
Optimization Design of Precision Seeder Based on Multi-channel Routing Control
Zheng Shiyong1, Zhu Qiang2, Qin Deze1, Bao Xiulan3
(1.College of Computer Science & Information Technology,Hezhou University,Hezhou 452899, China; 2.College of Information & Business, Zhongyuan University of Technology,Zhengzhou 450007, China; 3.Huazhong Agricultural University,Wuhan 430070, China)
Abstract:In order to improve the quality of sowing peanut seeder seeding, improve working efficiency, control system in peanut sowing machine guide path and metering device, the introduction of multi channel independent communication principle, reducing the leakage rate of seeding process; fuzzy neural network control theory, combining the fuzzy domain structure of peanut seeder the nonlinear optimization design.In order to verify the reliability of the design of peanut sowing machine structure and control system, the field test of peanut planter, find the qualified rate was higher than that of the traditional seeding machine multi channel routing peanut seeder by experiment, the replay rate was significantly lower than that of the traditional sowing machine, the broken rate and hole rate is relatively low, the description of choice and path control metering seeder has reached the optimal, and it provides a theoretical basis for the research and design of the peanut planter.
Key words:precision seeding; fuzzy control; sowing quality; neural network; metering device; multi-channel routing
文章編號:1003-188X(2016)05-0138-05
中圖分類號:S223.2+3
文獻標識碼:A
作者簡介:鄭仕勇(1983-),男,廣西桂林人,講師,碩士,(E-mail) zhengshiyong1983@163.com。
基金項目:湖北省自然科學基金項目(2014CFB322);廣西科學研究與技術開發項目(桂科轉1355009-9)
收稿日期:2015-04-15
