基于狗獾爪趾的仿生深松鏟振動減阻研究
2016-03-23 06:00:32白景峰呂秀婷史江濤
農機化研究 2016年5期
白景峰,李 博,呂秀婷,陳 軍,史江濤
(1.西北農林科技大學 機械與電子工程學院,陜西 楊凌 712100;2.西安亞澳農機股份有限公司,西安 710300)
?
基于狗獾爪趾的仿生深松鏟振動減阻研究
白景峰1,李博1,呂秀婷1,陳軍1,史江濤2
(1.西北農林科技大學 機械與電子工程學院,陜西 楊凌712100;2.西安亞澳農機股份有限公司,西安710300)
摘要:為降低深松作業的耕作阻力,對基于狗獾爪趾的仿生深松鏟進行了振動減阻性能的研究,將仿生減阻技術與振動減阻技術相結合,研究減阻效果。同時,在耕作速度為0.6、1.0m/s和耕作深度為250、300mm的條件下進行仿生深松鏟的振動減阻試驗。試驗結果表明:振動式深松鏟的耕作阻力隨著耕作深度和耕作速度的不斷增大而增大;在相同的試驗條件下,仿生深松鏟振動耕作方式的耕作阻力比未帶振動耕作方式的耕作阻力減小13.05%~18.94%,減阻效果明顯。
關鍵詞:振動減阻;深松作業;仿生;土槽試驗
0引言
近年來,隨著地球生態環境的嚴重惡化,世界各國面臨嚴重的生存問題,人們的生態環境意識逐漸增強,便提出了一種新型耕作方法——保護性耕作技術。即通過免耕、少耕的方法,用植物殘茬覆蓋表層土壤,增加土壤含水量,減少土壤流失,改善土壤結構,促進農業可持續發展[1-3]。深松作業作為土壤保護性耕作的四大支柱技術之一[4],近年受到了越來越多的重視。深松主要是在不翻轉土壤的情況下利用深松鏟打破土壤堅硬的底層,能有效改善耕層土壤的結構,提高土壤整體的疏松度,增大土壤內水和空氣的含量,使作物具有更強的抗旱能力,改善農作物的生長環境,提高作物的產量[5-8]。
近年來,國內外學者通過對某些有挖掘功能的動物爪趾進行了研究,發現熊、穿山甲、老鼠、達烏爾黃鼠、公雞和螻蛄等動物挖掘的過程中爪趾遇到的阻力較小。因此,學者根據動物爪趾特點提出了鏟結構設計的仿生學思路[9-11]。隨著對深松作業研究的不斷加深,振動式深松方式被許多專家學者提出并進行研究。眾多研究成果表明[12-14]:振動深松作業的耕作阻力明顯小于未進行振動的深松作業,且振動深松之后,土壤的體積質量明顯變小。
本文采用自激式振動機構,針對基于狗獾爪趾所設計的仿生深松鏟進行振動減阻研究,研究其振動減阻的效果。
1仿生深松鏟振動減阻結構
1.1試驗機構
振動式深松作業利用振動機構的振動作用,可以有效地降低深松作業的耕作阻力,減小牽引機具的能耗,同時能夠提高深松作業的耕作質量,目前常用的振動式深松機構可分為強迫式振動深松機構與自激式振動深松機構。
強迫式振動深松是指由牽引機具的動力輸出軸或者驅動電機提供動力,通過振動深松機構(偏心裝置、凸輪或者曲柄連桿結構等)使深松鏟產生周期性振動,并將振動所產生的能量作用在深松鏟上,減小土壤的剪切與摩擦阻力,從而降低深松鏟的耕作阻力。自激式振動深松是指通過彈簧等振動源,在土壤阻力的作用下使深松鏟被迫發生振動,其減阻效果主要取決于振動機構的參數、土壤物理性能、土壤結構狀態以及牽引機械的耕作速度等。在工作時,彈簧等彈性元件可以將土壤作用在深松機構的耕作阻力轉化為彈性元件的彈性勢能并帶動深松結構振動。
通過對強迫式振動深松機構與自激式振動深松機構的工作原理、結構特點與經濟性能分析,本次仿生深松鏟振動減阻性能試驗確定振動方式為自激式振動深松機構。本次試驗所采用的自激式振動深松機構(見圖1)由陜西西安亞澳農機股份有限公司提供,主要由壓力彈簧、深松鏟固定架、銷軸和主機架等構成。

圖1 自激式振動深松機構
1.2自激式振動來源
自激式振動深松是指通過壓力彈簧,在土壤耕作阻力的作用下使深松鏟被迫發生振動,從而減小耕作阻力,主要來源于以下幾方面[15]:
1)自激振動。深松作業時,由于土壤耕作阻力的影響,使深松鏟產生欠阻尼特性,進而發生自激振動。
2)土壤表層波動引起的振動。土壤表面凹凸不平,深松作業過程中,深松鏟及其固定機架以下懸掛銷銷軸為中心發生小幅度的擺動,從而造成深松鏟的振動。
3)土壤內部阻力分布不均造成的振動。由于土壤內部各個地方的硬度與含水率的不同而造成其內部耕作阻力分布不均勻,深松鏟在進行深松作業的時候,土壤會對深松鏟的作用力實時變化,作用力的不斷變化會對深松鏟產生隨機振動。
4)牽引機械自身激振所造成的振動。牽引機械在工作過程中,由于行駛地面的高低不平、發動機與液壓懸掛系統的工作及三點懸掛裝置的間隙配合,會使牽引機械自身發生一定的激振,從而帶動固定機架與深松鏟的振動。
2仿生深松鏟振動減阻試驗
2.1試驗方案
仿生深松鏟的振動減阻試驗可以采用田間試驗與土槽試驗兩種試驗方式。田間試驗土壤環境多變,且受到天氣等因素的限制,增加了試驗難度與試驗成本;而室內土槽試驗可以根據需要對土壤環境進行控制,且不受到天氣等因素的限制,且能夠更加合理的完成振動與未振動深松對比試驗。本次試驗選擇在陜西楊凌西北農林科技大學機械與電子工程學院農機化實驗室內的土槽內進行。
根據實驗目的:確定本次試驗的深松方式為帶振動與不帶振動兩種工作方式,耕作速度為0.6m/s和1.0m/s,耕作深度為250mm和300mm,試驗安排如表1所示。
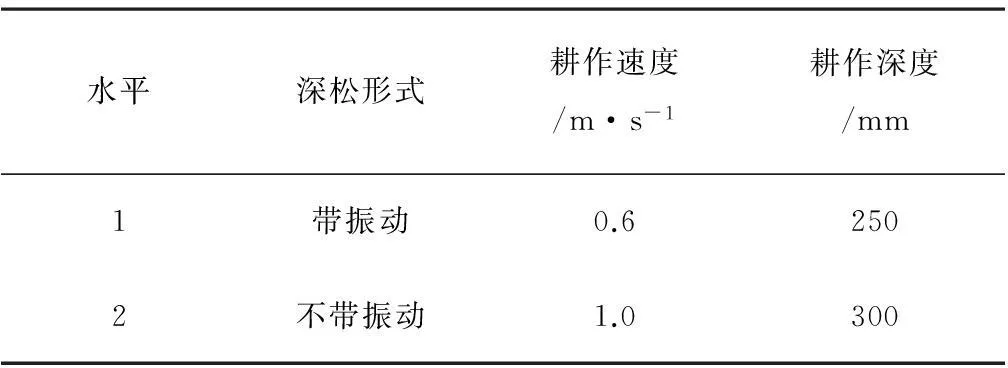
表1 仿生深松鏟振動減阻試驗方案
2.2試驗條件與裝置
試驗所采用的土壤是陜西關中農田土壤,屬于黃土母質上發育的農業土壤[16],其含水率為17%。以土槽試驗車為試驗平臺,安裝所需的試驗裝置與儀器(見圖2),試驗中選用的傳感器包括下懸掛銷傳感器(型號CYB-601S)、上拉桿傳感器(型號CYB-602S)。深松鏟耕作阻力分力的動態數據由信號采集箱采集,并通過無線傳輸設備(SZ02-USB-2K)將所采集的數據發射出來,由無線接收設備將數據接收;通過電腦中的遙測儀采集程序將其轉換成深松鏟的耕作阻力合力,并將其保存。

圖2 帶振動的固定及懸掛裝置
在試驗過程中用到的其他設備包括:室內土槽試驗車、土壤平整壓實設備、卷尺、丁字尺及數碼照相機等。
2.3試驗內容及方法
試驗所采用的室內土槽長度為23mm、寬度為1.8m,在進行試驗之前需對試驗土壤進行滲水、平整、壓實及區域劃分等準備工作。為得到相對較準確的試驗數據,將有效長度分為3部分:前6m為深松鏟入土階段和試驗車加速階段,中間11m為試驗穩定測量階段,后6m為深松鏟出土階段和試驗車減速階段。此次試驗的有效寬度為1.8m,為保證深松鏟之間的對比性和對土槽試驗空間的有效利用,每次在土槽內進行2次深松試驗,每次試驗深松鏟距離土槽導軌內側為500mm,縮短了試驗時間,提高了試驗效率。
3結果與分析
仿生深松鏟在振動與未振動兩種形式在不同試驗條件下的耕作阻力如圖3所示。
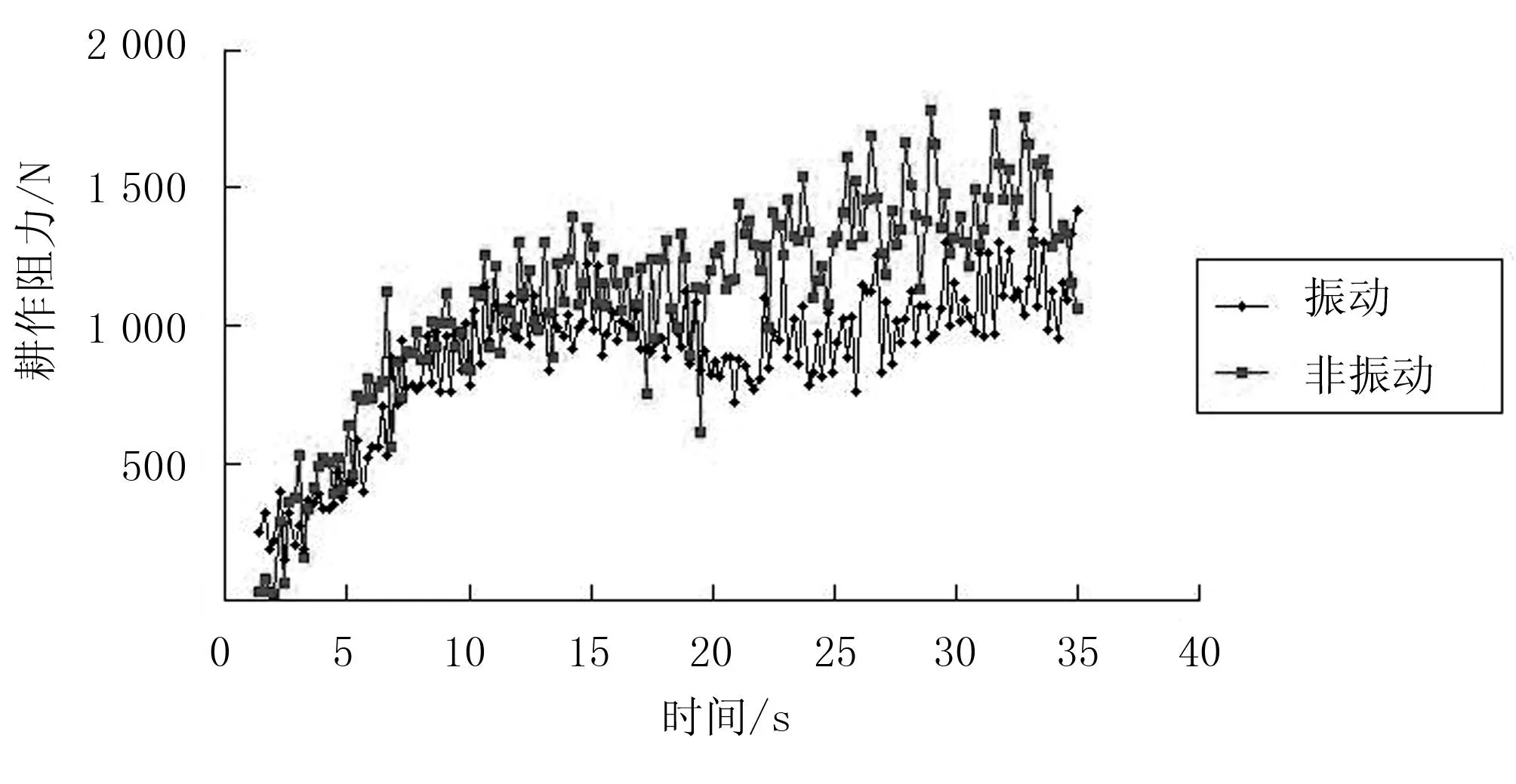
(a) 耕作速度:0.6m/s,耕作深度:250mm
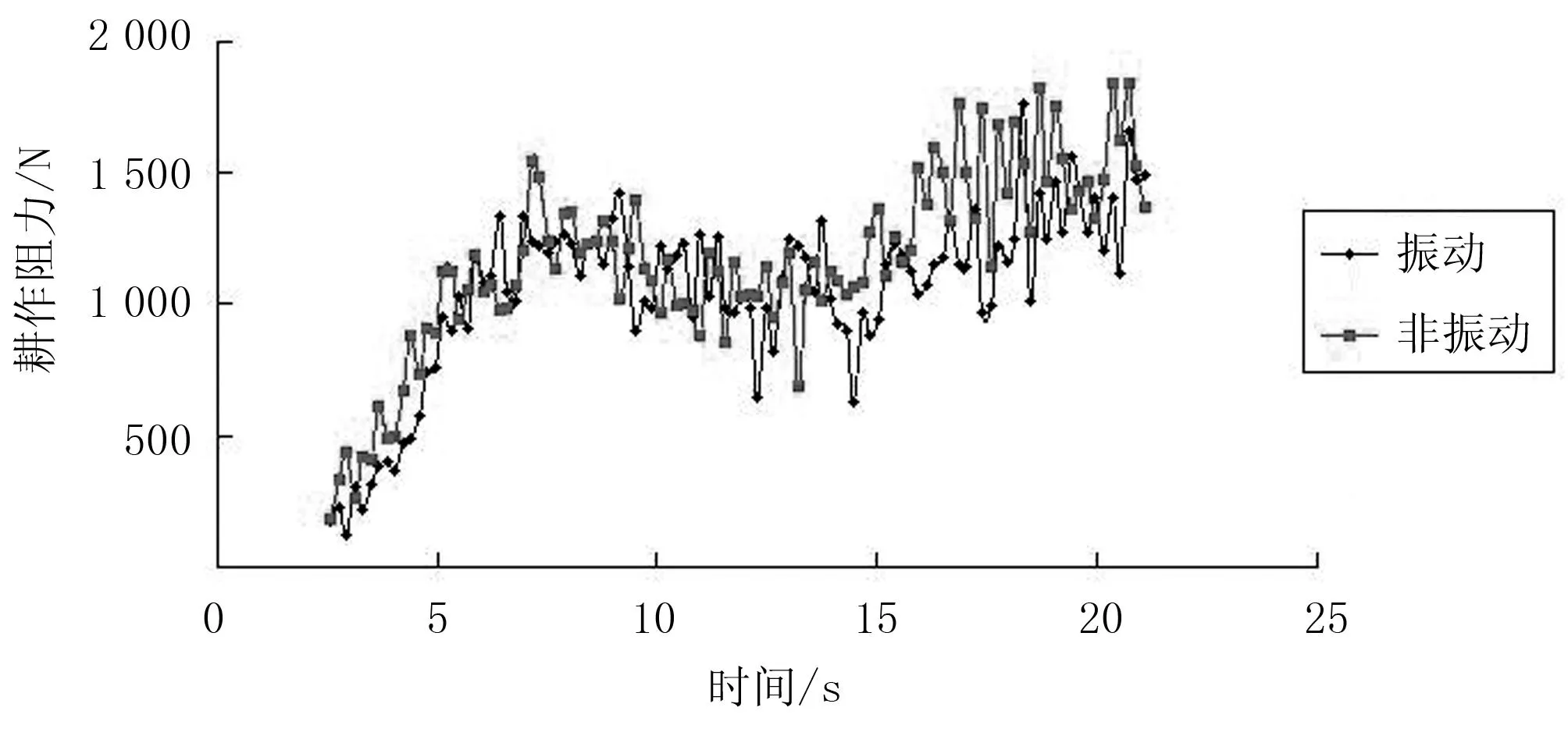
(b) 耕作速度:1.0m/s,耕作深度:250mm
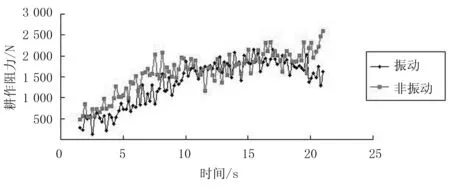
(c) 耕作速度:0.6m/s,耕作深度:300mm
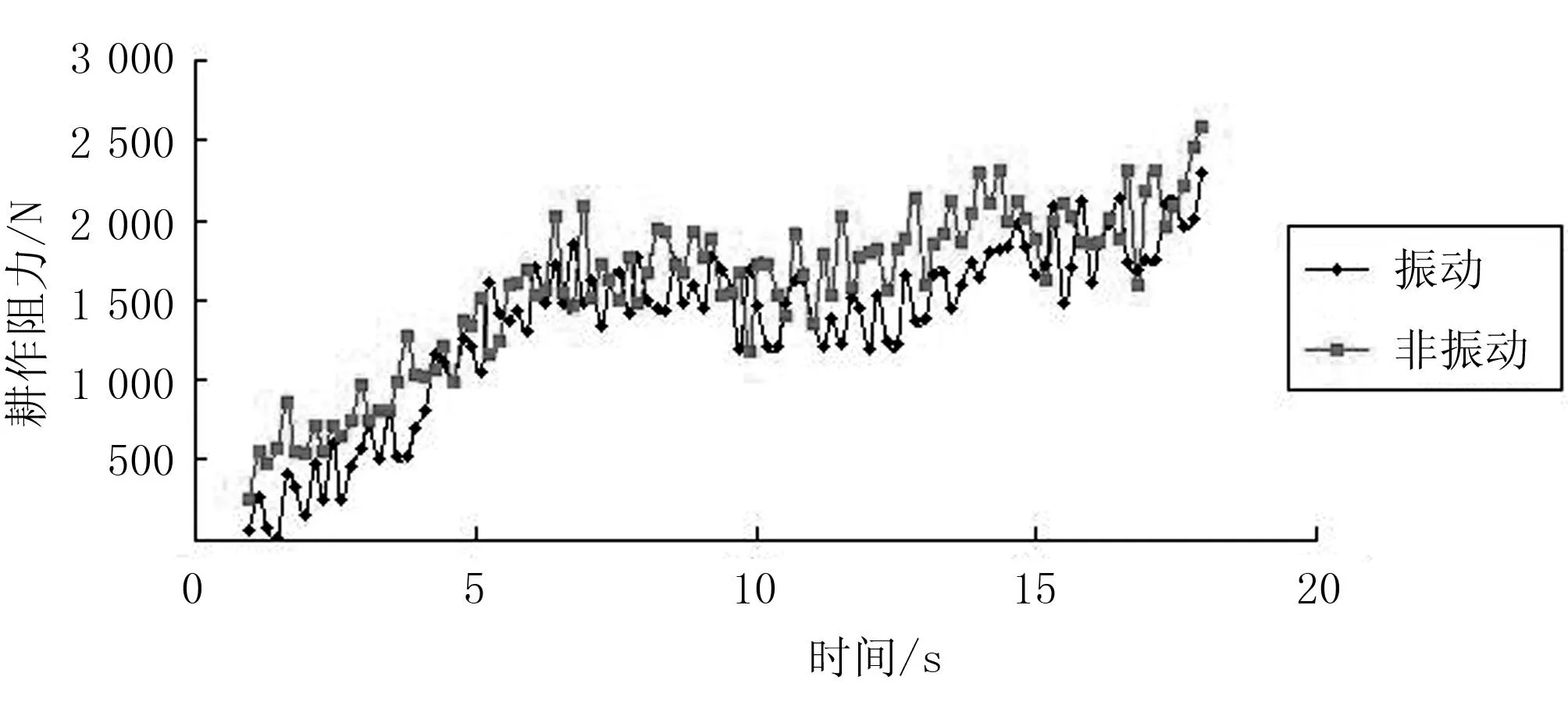
(d) 耕作速度:1.0m/s,耕作深度:300mm
在試驗過程中,由于土壤內存在一些小石塊、堅硬的土塊或者某一地區的緊實度較低,會造成耕作阻力檢測的時候出現一些奇異點(數據突然變大或者變小),在進行試驗處理時應將奇異點去除之后在進行數據分析。
表2為仿生深松鏟在振動與未振動兩種工作形式下,在耕作速度為0.6m/s與1.0m/s和耕作深度為250mm與300mm試驗條件下耕作阻力的平均值。
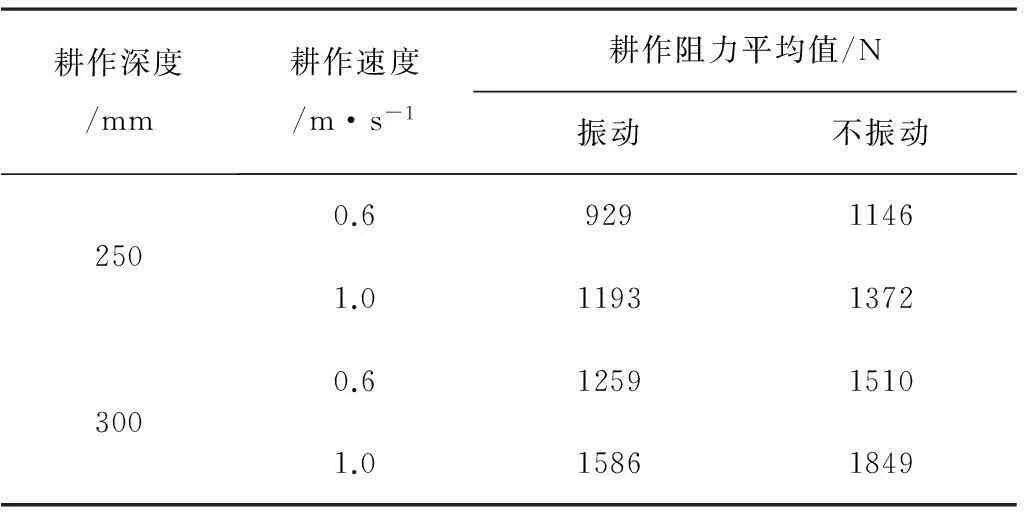
表2 仿生深松鏟振動減阻試驗結果
通過表2中的對比結果可知:當耕作深度為250mm、耕作速度由0.6m/s增大到1.0m/s時,振動式仿生深松鏟的耕作阻力增大了28.42%;當耕作深度為300mm、耕作速度由0.6m/s增大到1.0m/s時,振動式仿生深松鏟的耕作阻力增大了25.97%;當耕作速度為0.6m/s、耕作深度由250mm增大到300mm時,振動式仿生深松鏟的耕作阻力增大了35.52%;當耕作速度為1.0m/s、耕作深度由250mm增大到300mm時,振動式仿生深松鏟的耕作阻力增大了32.94%。
對上述結果進行分析可知:深松作業的耕作速度與耕作深度均對振動式仿生深松鏟的耕作阻力產生了顯著影響,其耕作阻力的變化決定于耕作速度與耕作深度的雙重作用,而且耕作深度的影響相比較耕作速度的影響更加顯著。
對表2中所示的結果進行分析可知:當速度v=0.6m/s、耕深d=250mm時,仿生深松鏟振動深松方式的耕作阻力比未進行振動深松方式的耕作阻力減小了18.94%;當v=0.6m/s、d=300mm時,仿生深松鏟振動深松方式的耕作阻力比未振動深松方式的耕作阻力減小了13.05%;當v=1.0m/s、d=250mm時,仿生深松鏟振動深松方式的耕作阻力比未振動深松方式的耕作阻力減小了16.62%;當v=1.0m/s、d=300mm時,仿生深松鏟振動深松方式的耕作阻力比未振動深松方式的耕作阻力減小了14.22%。
通過對上述結果進行分析可知,仿生深松鏟振動耕作方式的耕作阻力比未帶振動耕作方式的耕作阻力減小13.05%~18.94%,減阻效果明顯。
4結論
1)自激式振動減阻方式的振動來源主要來自自激振動、土壤表層土壤凹凸不平、土壤內部緊實度含水率不同與牽引機械自身振動等4方面。其中,自激振動為自激式振動的最主要來源。
2)振動式仿生深松鏟的耕作阻力隨著耕作深度與耕作速度的不斷增大而增大,并由兩者共同影響,且耕作深度的影響比耕作速度的影響更加明顯。
3)振動式仿生深松鏟的耕作阻力明顯小于未經振動的仿生深松鏟,且減阻效果可達到13.05%~18.94%,平均減阻15.71%,減阻效果明顯。
參考文獻:
[1]Li Bo,Liu Fangyi,Chen Jun,et al.Distinct element method analysis and field experiment of soil resistance applied on the subsoiler[J].International Journal of Agricultural and Biological Engineering,2014,7(1):54-59.
[2]楊建,王云龍,馬明任,等.保護性耕作技術在中國農業生產中的意義[J].雜糧作物,2005,25(6):386 -388.
[3]Hammond R B. Long-term conser vat ion tillage studies; impact of no -till on seedcorn maggot[ J].Crop Protection,1997, (3) : 221-225.
[4]朱瑞祥,張軍昌,薛少平,等. 保護性耕作條件下的深松技術試驗[J].農業工程學報,2009,25(6):145-147.
[5]高煥文,李洪文,王興文.旱地深松試驗研究[J].干旱地區農業研究, 1995,13(4): 126-133.
[6]李博,劉凡一,陳軍,等.深松鏟耕作阻力影響因素的離散元法仿真分析[J].農機化研究,2015,37(2):71-74.
[7]Li Bo,Liu Fanyi,Xia Rui,et al.Distinct element method analysis and experiment of a biomimetic subsoiler[J].International Agricultural Engineering Journal,2015.3(1):47-54.
[8]張海林,高旺盛,陳阜,等.保護性耕作研究現狀和發展趨勢及對策[J].中國農業大學學報,2005,10(1):16-20.
[9]朱風武,佟金.土壤深松技術及高效節能仿生研究的發展[J].吉林大學學報:工學版,2003,33(2):95-99.
[10]陳坤,胡曉麗,趙新子,等.國內外深松鏟研究現狀與展望[J].農業與技術,2010,30(3):30-34.
[11]張金波,佟金.仿生減阻深松鏟設計與試驗[J].農業機械學報,2014,45(4):141-145.
[12]李霞,付俊峰,張東興,等.基于振動減阻原理的深松機牽引阻力試驗[J].農業工程學報,2012,1:32-36.
[13]荊苗.雙排反向振動深松機的設計及田間試驗.[D].鄭州:河南理工大學,2012.
[14]邱立春,李寶筏.自激振動深松機減阻試驗研究[J].農業工程學報,2000,16(6):72-76.
[15]張璐.深松鏟減阻技術研究[D].長春:吉林大學,2013.
[16]楊有剛,張宏,馮濤,等.土壤淺深松聯合松耕機設計和淺松土試驗[J].機械工程學報,2012(19):163-168.
Study on Vibration Anti-drag of the Badger Claws Bionic Subsoiler
Bai Jingfeng1,Li Bo1,Lv Xiuting1,Chen Jun1, Shi Jiangtao2
(1.Collage of Mechanical and Electronic Engineering, Northwest A & F University, Yangling 712100, China; 2.Xi’an Yaao Agricultural Machinery Co.Ltd.,Xi’an 710300,China)
Abstract:To reduce tillage resistance, this paper research the vibration anti-drag of the bionic subsoiler based on the badger claws, and study the anti-drag effect that the bionic anti-drag technology combined with the vibration anti-drag technology. And the bionic subsoiler vibration anti-drag test condition was working as the speed of 0.6m/s and 1.0m/s, the tillage depth of 250mm and 300mm.The result shows that the tillage resistance of the vibration subsoiler increased with the increasing of tillage depth and speed.The tillage resistance of the bionic subsoiler with the condition of vibration was reduced by 13.05%~18.84% and the anti-drag effect was obvious in comparison to the bionic subsoiler with no vibration under the same test conditions.
Key words:vibration anti-drag; subsoiler; bionic; soil-bin test
文章編號:1003-188X(2016)05-0224-04
中圖分類號:S222.12+9
文獻標識碼:A
作者簡介:白景峰(1989-),男,河北滄州人,碩士研究生,(E-mail)541522260@qq.com。通訊作者:陳軍(1970-),男,寧夏固原人,教授,博士生導師,(E-mail)chenjun_jdxy@nwsuaf.edu.cn。
基金項目:“十二五”國家科技支撐計劃項目(2011BAD29B08);陜西省科學技術研究發展計劃項目(2014K02-09-03)
收稿日期:2015-04-24
