一種高精度自主導航定位的葡萄采摘機器人設計
2016-03-23 08:11:30郭素娜劉志剛
農機化研究 2016年7期
郭素娜,張 麗,劉志剛
(1.河南工業職業技術學院,河南 南陽 473000;2.南昌大學,南昌 330031 )
?
一種高精度自主導航定位的葡萄采摘機器人設計
郭素娜1,張麗1,劉志剛2
(1.河南工業職業技術學院,河南 南陽473000;2.南昌大學,南昌330031 )
摘要:為了提高葡萄采摘機器人自主導航能力,增強對葡萄成熟度的準確識別功能,降低漏采率和誤采率,設計了一種新式的基于RSSI自主導航和顏色特征提取的葡萄采摘機器人。該機器人使用RSSI定位技術,首先對裝有無線傳感器的葡萄樹進行定位,然后利用機器視覺系統對葡萄的成熟度進行判斷,并對滿足采摘條件的葡萄使用機械手進行采摘。對葡萄采摘機器人的性能進行了測試,通過測試發現:機器人對裝有傳感器的葡萄樹的準確識別率達到了95%以上,對葡萄成熟度的判斷達到了98%以上,是一種相對高效的葡萄采摘機器人。
關鍵詞:葡萄采摘;自主導航;顏色識別;漏采率;機器人
0引言
最早的機械采摘方法是采用機械振搖式和氣動振搖式,隨著科學技術的發展,農業機器人在國內外迅速發展起來。自從20世紀60年代美國人Schertz和Brown提出用機器人采摘果實之后,對采摘機器人的研究受到廣泛重視。我國農業機器人的研究起步比較晚,但正在不斷的發展。其中,包括中國農業大學的草莓采摘機器人研究、東北林業大學林木球果采摘機器人研究及上海交通大學的黃瓜機器人研究等。本文對葡萄采摘機器人進行了改進,以期得到較低漏采和誤采率的機器人。
1葡萄采摘自主導航定位機器人總體設計
果蔬采摘機器人的自動導航和識別功能都依賴于視覺系統。機器視覺就是給機器人裝上視覺傳感器,模擬人的視覺功能,從圖像或圖像序列中提取信息,對葡萄樹和葡萄進行定位和識別,使機器人完成葡萄采摘任務。視覺傳感器主要由彩色攝像機來尋找和識別成熟的葡萄,通過顏色特征的提取,得到成熟葡萄的信息;然后利用RSSI定位導航功能,對葡萄完成采摘。其基本框架如圖1所示。
葡萄自主導航機器人使用RSSI定位技術對葡萄樹進行定位,使用特征提取方法對葡萄的成熟度進行判斷。其具體采摘過程為使用RSSI定位技術首先對裝有無線傳感器的葡萄樹進行定位,然后利用機器視覺系統對葡萄的成熟度進行判斷。如果滿足采摘條件,則通過機械手對葡萄進行采摘;如果不滿足采摘條件,則繼續對葡萄進行定位。
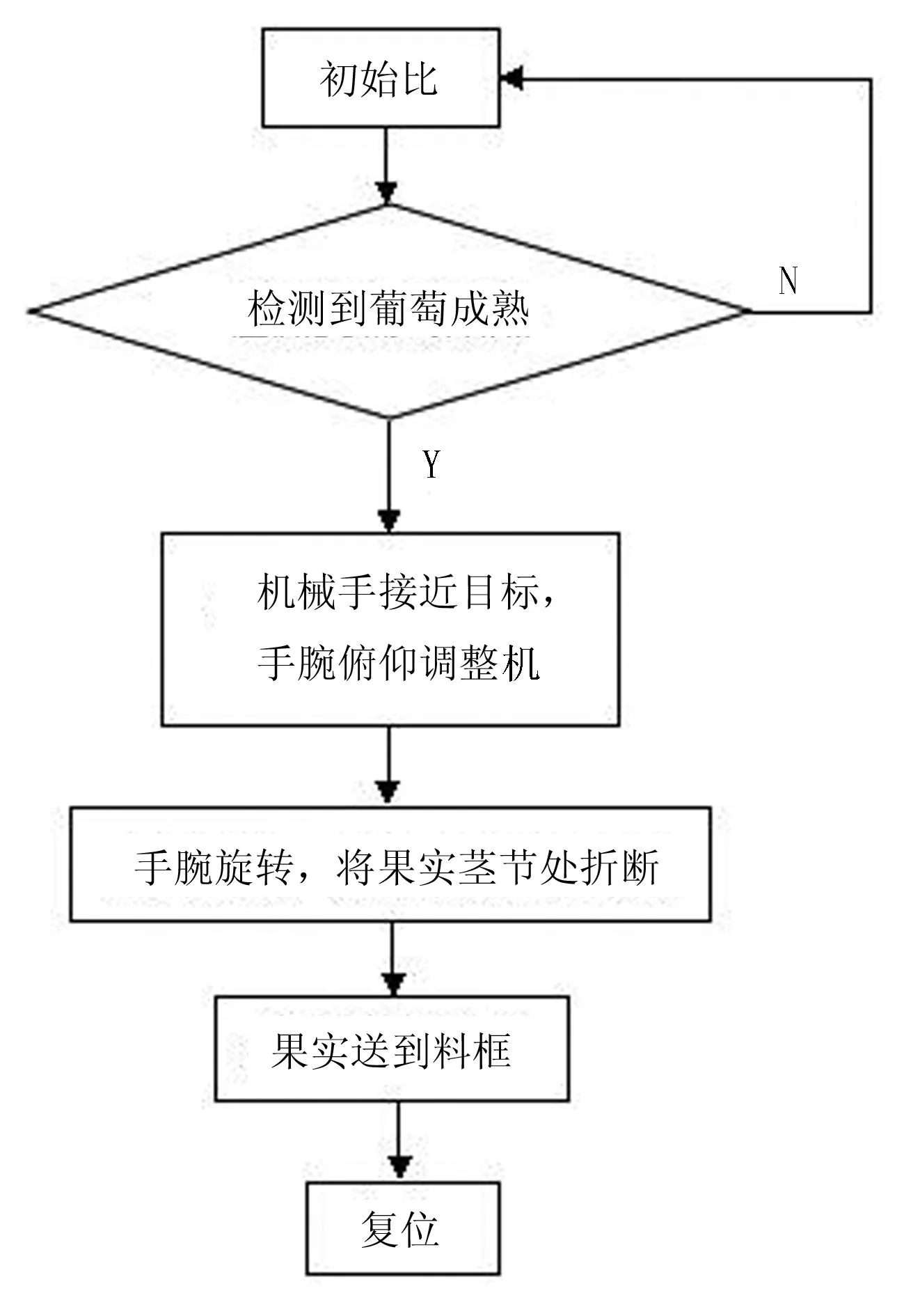
圖1 葡萄自主導航采摘機器人總體設計框架
2采摘機器人結構和定位功能設計
2.1結構設計
2.1.1機械臂基本結構
對于葡萄采摘機器人的設計需要綜合考慮采摘空間、冗余空間和姿態空間等因素,通過綜合考慮使用5 旋轉自由度和1移動的方案。其主要部分包括軀干、手臂、腰部、腕部及小臂等,其結構如圖2所示。
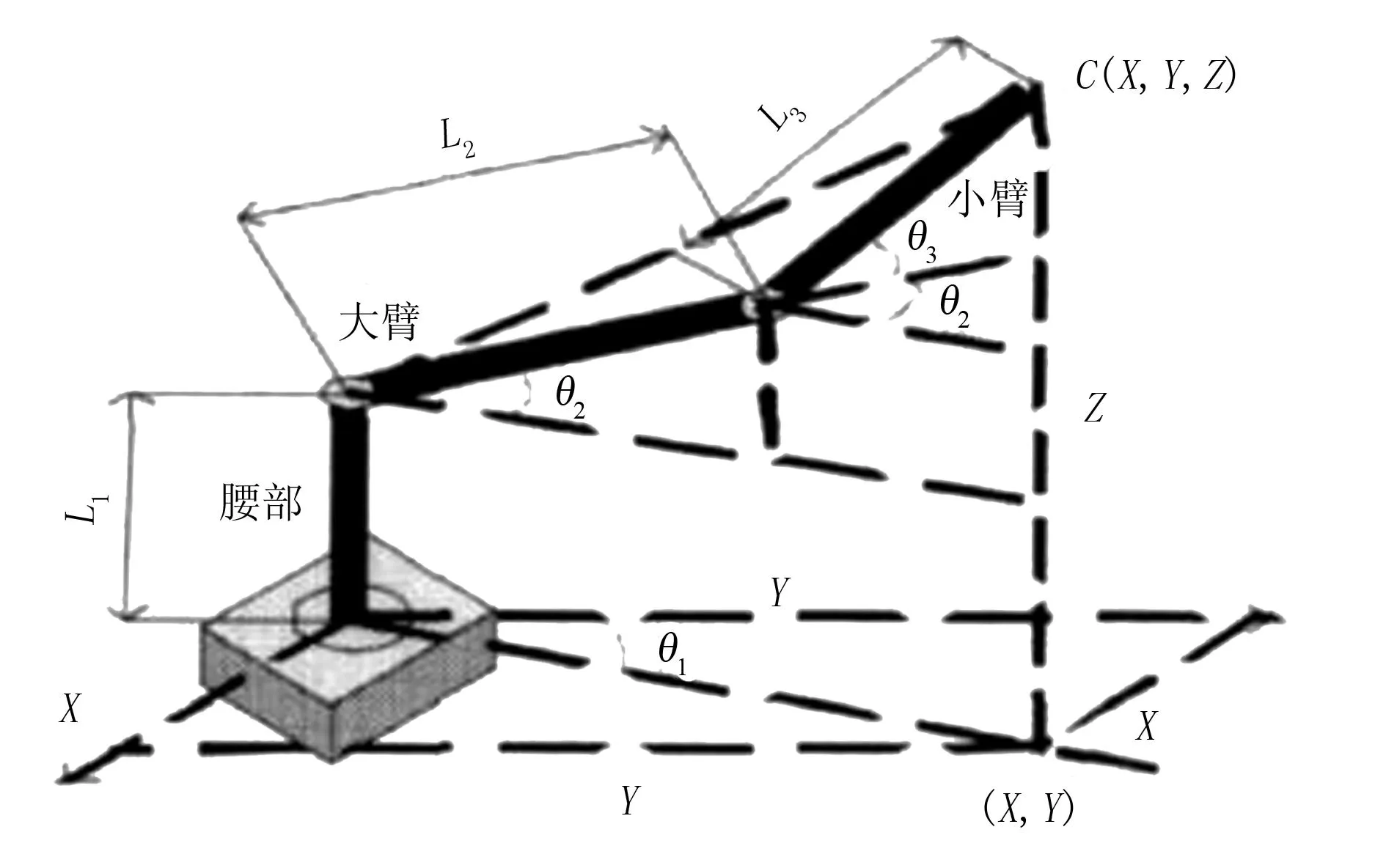
圖2 機器人基本結構示意圖
2.1.2運動控制系統
目前,采用PC作為主控器的運動控制方式,其控制方式主要有兩種:一是使用PC控制卡對電機進行控制;二是采用CAN總線對運動進行控制。基于經濟性考慮,本文選自使用第2種控制方案,其結構框架如圖3所示。
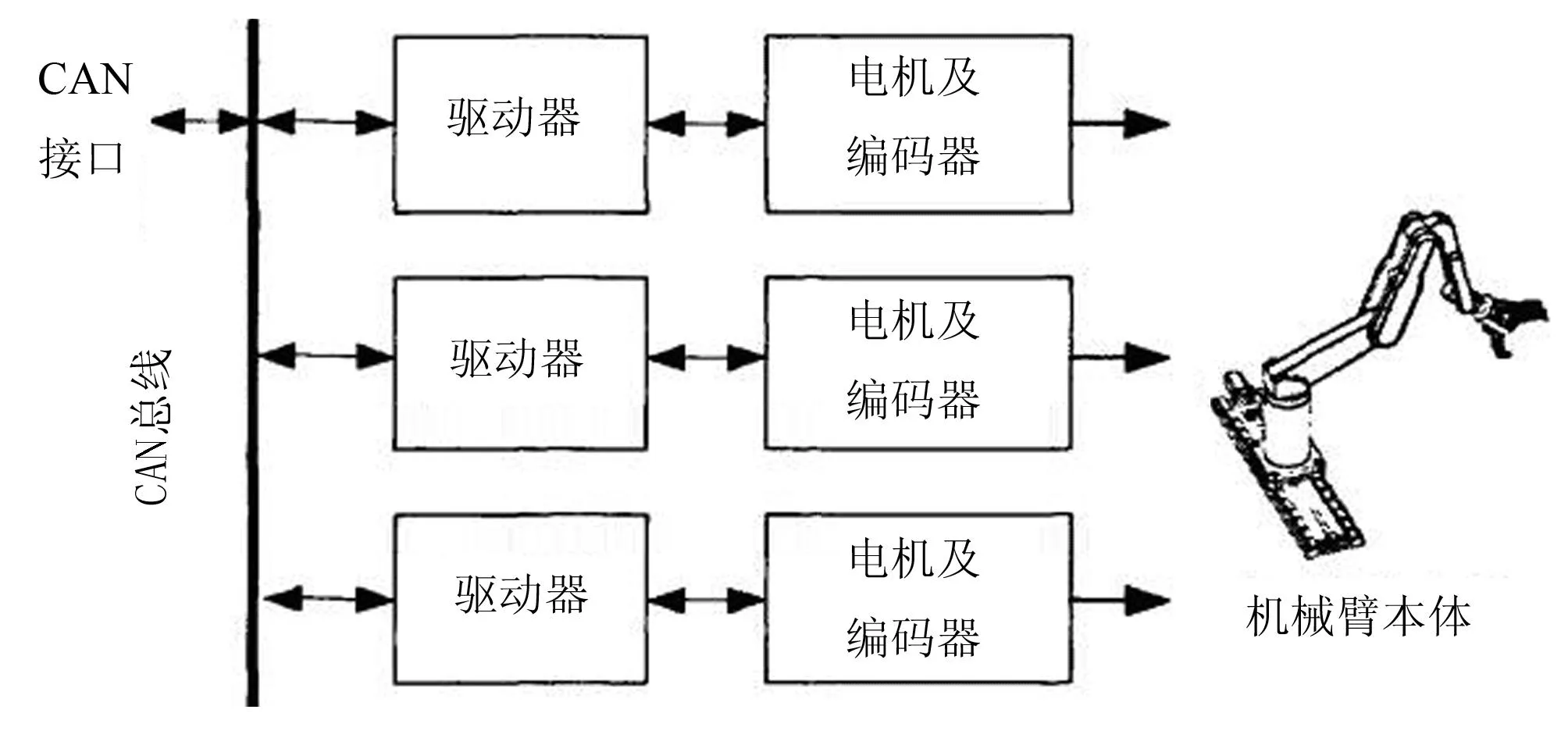
圖3 伺服電機運動控制系統控制示意圖
圖3中,硬件組成包括通用PC機或工控機,基于PCI總線的高性能的ZLG-PCI5 110 Aceelnet Micro Micro Module CAN卡、Copley Panel和Copley StepNet伺服驅動器。
2.1.3末端執行器
葡萄采摘機械在進行作業時,其末端執行機構的動作是模擬人的動作設計的,其主要動作是抓取果實,完成果實與梗的剝離(見圖4),需要使機器人的腕部繞j軸旋轉和繞i軸回轉實現。

1.機械手末端關節 2.末端執行器 3.采摘目標
機器人執行末端可以采用柔軟的復合材料作為末端執行器的材料,為了使機器人準確定位及執行末端能夠準確地識別葡萄的成熟度,需要使用相關定位和圖像處理方法實現定位和識別功能。
2.2定位功能設計
機器人大部分采用無線傳感網絡來定位,在實際作業環境中會存在較多的障礙物,因此在實際信號傳播過程中,信號會產生一定的損耗。其中信號傳輸的基本模型為
(1)
其中,PL(d)表示經過距離d后的路徑損耗;PL(d0)表示經過單位距離后的路徑損耗;d0為單位距離;X0服從高斯分布,其均值為1;n表示信號衰減因子。則接收端的信號強度可以表示為
(2)
RSSI=
(3)
考慮經濟成本等因素,該模型可以進一步簡化為
RSSI=-10nlgd-A
(4)

(5)
將每個方程分別減去最后一個方程可得
(6)
其線性表達式可以寫成
Az=b
(7)
其中
由于測量過程中存在誤差N,利用最小二乘法原理可得
Q(z)=‖b-Az‖2
(8)
對z求導得
(9)
如果AAT非奇異,則
z=(ATA)-1ATb
(10)
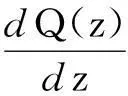
則可求出用戶坐標(x,y)。機器人的定位流程如圖5所示。
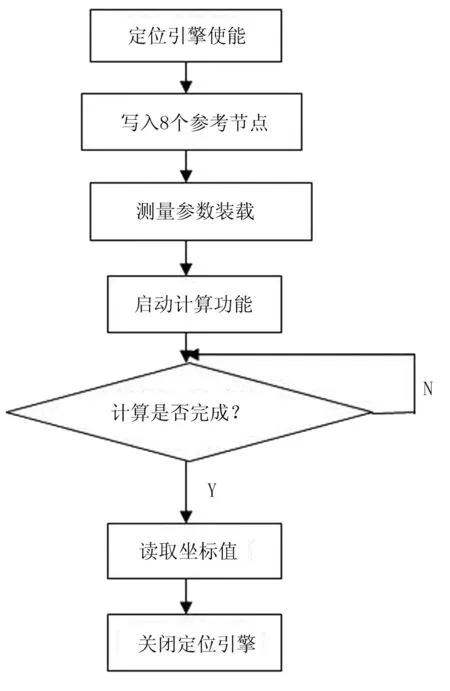
圖5 運動定位流程圖
機器人運動系統定位的主要過程包括參考點的設置、計算機處理及得到位置坐標等。當讀取坐標后,信號被以電信號的方式傳送到運動系統,通過路徑規劃,完成定位。
3自主導航葡萄采摘機器人采摘過程測試
為了驗證本文設計的葡萄采摘機器人的自主定位導航功能,在葡萄田園對采摘機器人進行了測試。測試項目主要包括葡萄樹的節點定位和葡萄成熟度的識別,測試機器人如圖6所示。

圖6 葡萄采摘機器人測試示意圖
假設測試節點個數為50個,即有50顆葡萄樹,其中包括39個已知節點和11個未知節點,坐標系是60m×60m,節點通信半徑為120m。通過計算,得到了如圖7所示的節點鄰里關系圖。

圖7 節點鄰居關系圖
根據RSSI定位原理,可以測試未知節點,為了有效地表示位置節點,使用圓圈對位置節點進行標記,用星形表示已知節點,如圖8所示。其中,圓圈部分表示待摘葡萄穗的葡萄樹。通過RSSI定位功能,對圓圈進行定位,最后通過計算得到了如圖9所示的定位誤差曲線。
由圖9可以看出:隨著時間的變化,定位誤差的峰值比較平穩,最大定位誤差不超過15cm,定位精度較高;普通樹定位完成后需要對葡萄成熟度進行識別。
圖10表示主要顏色特征提取的灰度直方圖結果。機器人的邏輯判斷模塊可以根據灰度值對葡萄的成熟度進行判斷,當滿足采摘的顏色閾值時,便對葡萄進行采摘。通過多次測試,得到了如表1所示的測試采摘結果。
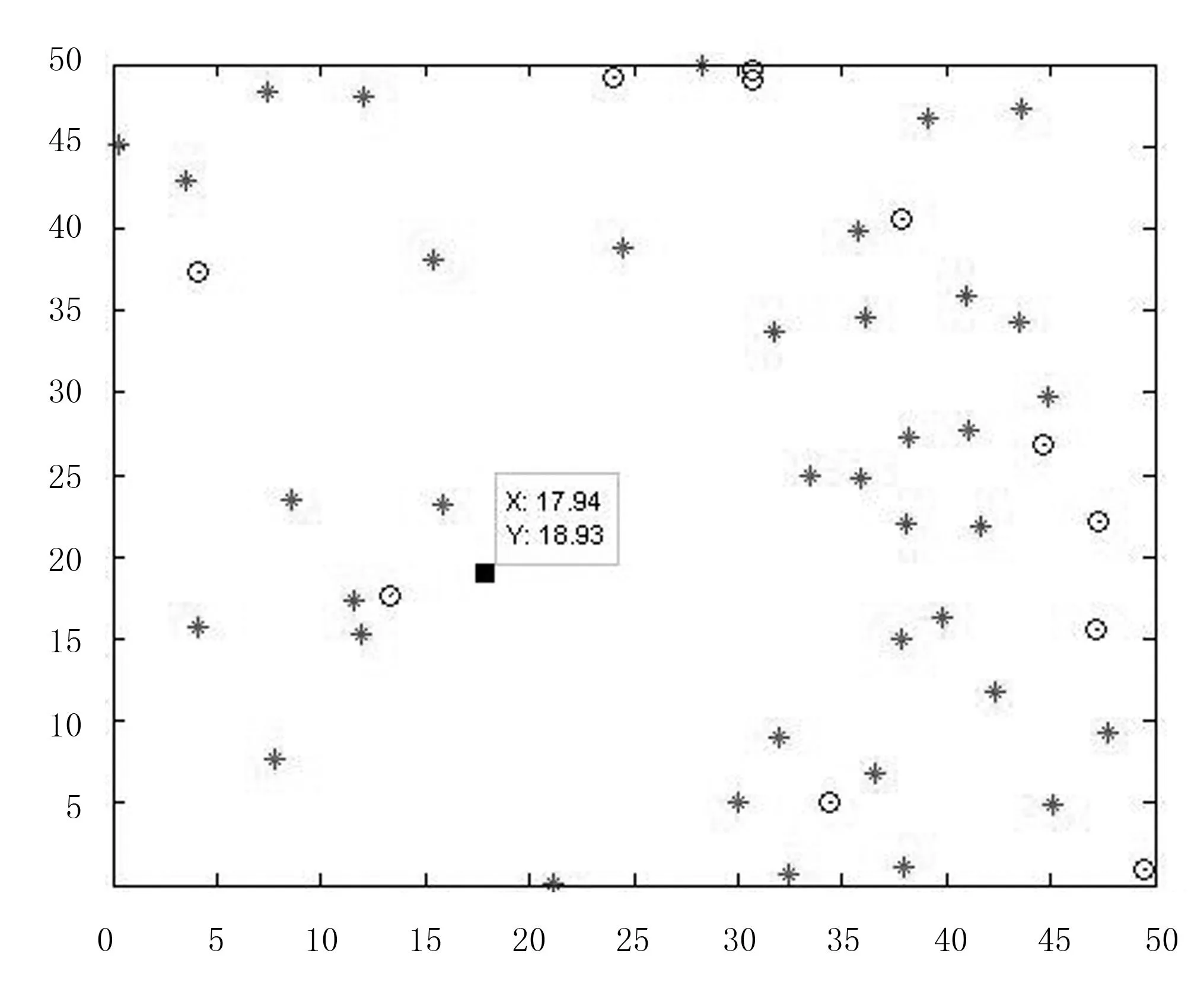
圖8 節點定位結果圖
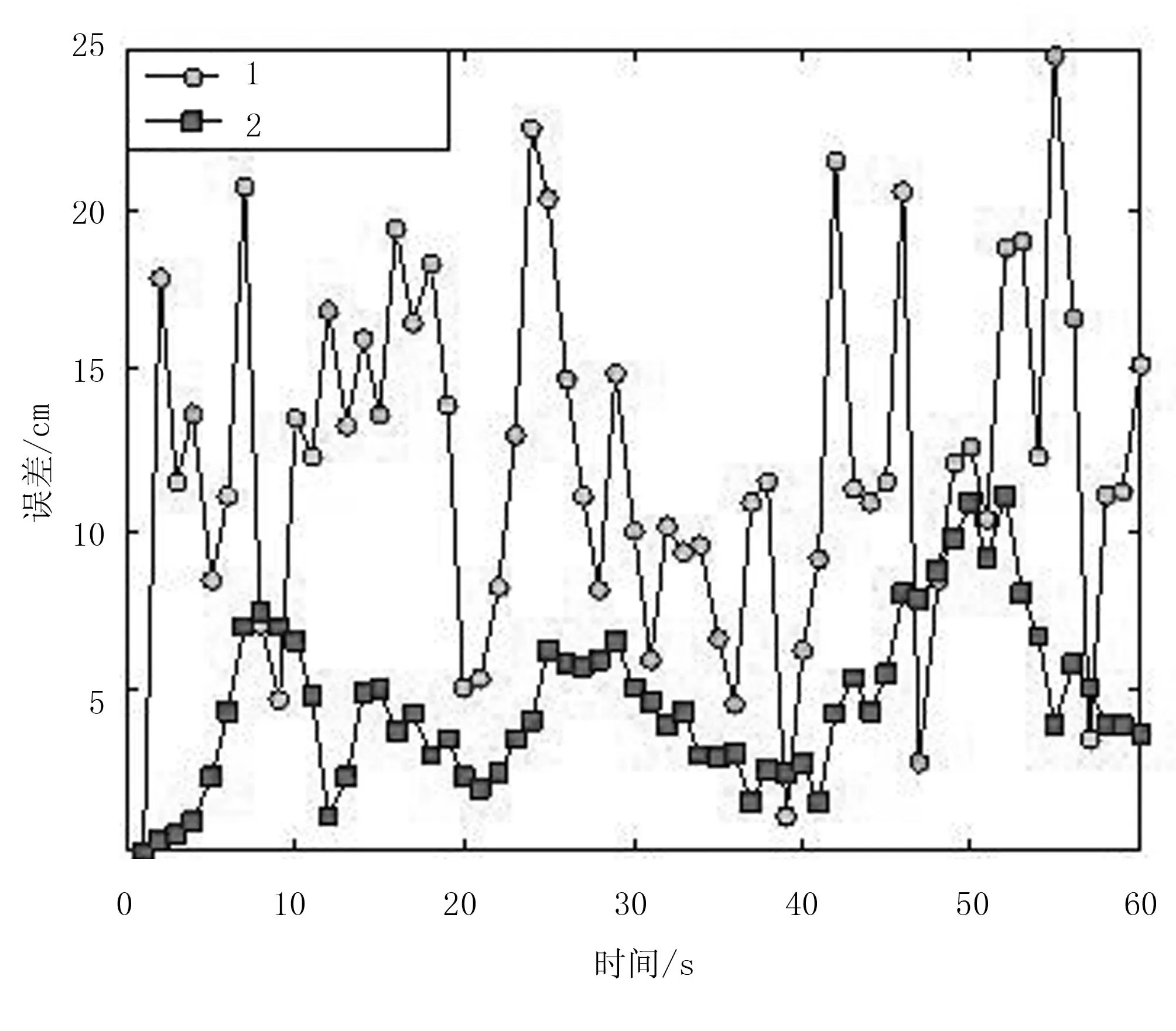
圖9 距離定位誤差
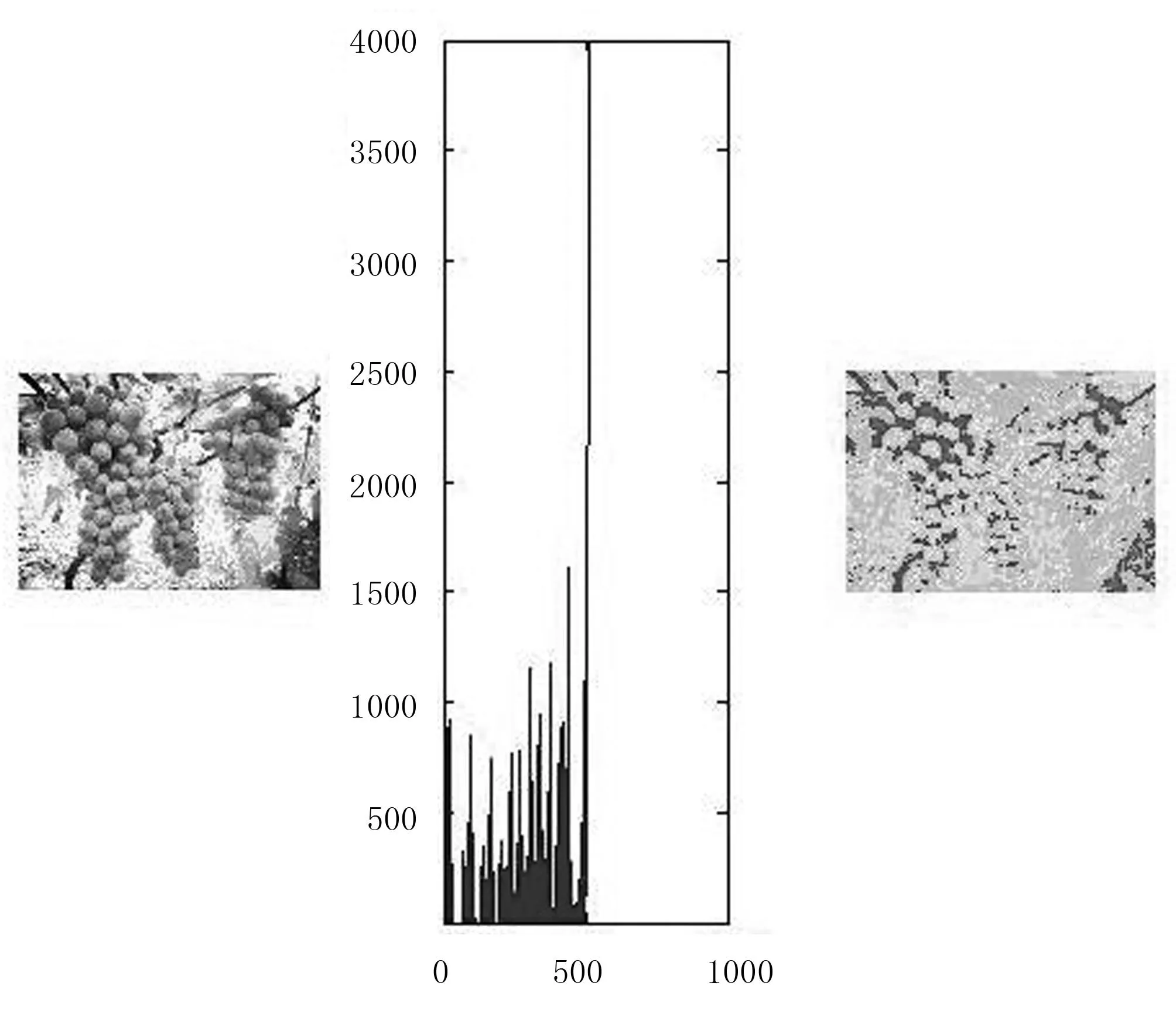
圖10 顏色特征提取
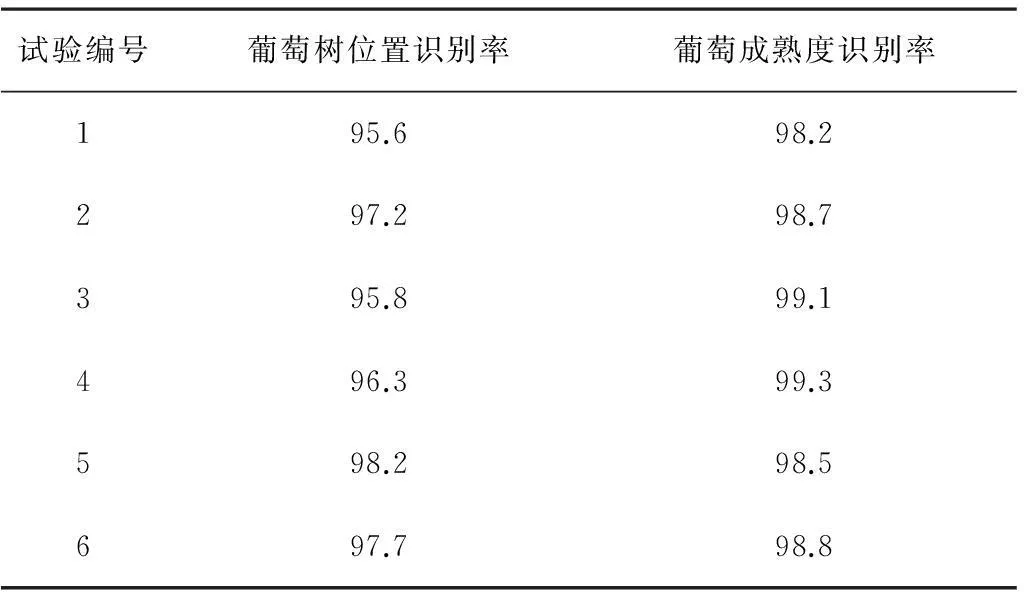
%
表1表示機器人采摘葡萄過程中導航和葡萄成熟度的準確識別率。由表1可以看出:機器人對裝有傳感器的葡萄樹的準確識別率達到了95%以上,對葡萄成熟度的判斷達到了98%以上,識別率較高,可以滿足葡萄采摘的需要。
4結論
基于RSSI無線傳感器定位原理和顏色特征提取理論,設計了一款新的自主導航的葡萄采摘機器人,并對執行末端、運動控制系統和導航定位系統進行了設計。通過對機器人的自動導航和葡萄成熟度識別進行測試,最終得到了定位誤差曲線和圖像顏色特征提取結果。由測試結果可以看出:機器人對葡萄樹定位和葡萄成熟度識別的精度較高。
參考文獻:
[1]任維政, 徐連明.基于RSSI的測距差分修正定位算法[J].傳感器技術學報,2008,21(7):1247-1250.
[2]王永才, 趙千川,鄭大鐘.傳感器網絡自身定位方法的設計與實現[J].計算機工程與應用,2005, 41(13):4-6.
[3]李娟, 王珂, 李莉.基于錨圓交點加權質心的無線傳感器網絡定位算法[J].吉林大學學報:工業版, 2009,39(6):1649-1653.
[4]楊鳳, 史浩山, 朱靈波, 等.一種基于測距的無線傳感器網絡智能定位算法[J].傳感器技術學報, 2008,27(1):135-140.
[5]劉艷文, 王福豹, 段渭軍,等.基于DV-Hop定位算法和RSSI測距技術的定位系統[J].計算機應用, 2007,27(3):516-527.
[6]孫佩剛, 趙海, 羅玎玎.智能空間中RSSI定位問題研究[J].電子學報,2007, 7(35):1240-1245.
[7]江冰, 吳元忠, 謝冬梅.無線傳感器網絡節點自身定位算法的研究[J].傳感技術學報, 2007(6): 1381-1385.
[8]李連, 朱愛紅.無線傳感器網絡中的定位技術研究[J].微計算機信息:測控自動化, 2005, 21(9): 133-135.
[9]李建中, 高宏.無線傳感器網絡的研究進展[J].計算機研究與發展,2008,45(1):63-72.
[10]邱天爽,唐洪,李婷,等. 無線傳感器網絡協議與體系結構[M].北京:電子工業出版社, 2007.
[11]石鵬, 徐鳳燕, 王宗欣.基于傳播損耗模型的最大似然估計室內定位算法[J].信號處理,2005, 21(5):502-504.
[12]李洪欣,楊建中.基于兩參數的表冷器建模方法研究[J].建筑熱能通風空調,2009,28(6):15-17.
[13]孟慶山.水源熱泵機組變流量水系統節能優化探討[J].制冷與空調,2010,10(1):84-89.
[14]謝志勇,張鐵中,趙金英.基于 Hough 變換的成熟草莓識別技術[J].農業機械學報,2007,38(3): 106-109.
[15]王東,趙宇,王秀紅.一種改進的DFT迭代的MIMO-OFDM系統信道估計算法[J].應用科技,2009(3):19-22.
[16]徐文穎,張靜,董建萍.導頻信道估計中的插值算法[J].上海師范大學學報,2007,12(6):41-46.
[17]陳暉,陳曉光.基于直接判決導頻跟蹤的OFDM系統快時變信道估計[J].通信學報,2006,9(27):1-5.
[18]李文見, 姬江濤.輪履復合式農業機器人越避障控制研究[J].河南科技大學學報: 自然科學版, 2007(8): 57-59.
[19]王仲民, 戈新良, 唐智強.多傳感器信息融合技術研究現狀和發展趨勢[J].河北工業大學學報,2003, 32(2): 30-35.
[20]國剛, 王毅.應用BP神經網絡進行手寫體字母數字識別[J].人工智能及識別技術, 2008,4(6):1459-1460.
[21]施少敏, 馬彥恒, 陳建泗.基于BP神經網絡的數字識別方法[J].兵工自動化,2006, 25(10): 40-41.
[22]許穎泉.用神經網絡進行數字圖像識別研究[J].應用科技, 2008(12):59-60.
A High Precision Autonomous Navigation Positioning Grape Picking Robot Design
Guo Suna1, Zhang Li1, Liu Zhigang2
(1.Henan Polytechnic Institute,Nanyang 473000,China; 2.Nanchang University,Nanchang 330031,China)
Abstract:In order to improve the autonomous navigation capability of grape picking robot, and strengthen the function of accurate identification of the grape maturity, lower leakage rate and error rate, a new type of autonomous navigation and color feature extraction based on RSSI grape picking robot has been designed. Grape picking robot using RSSI positioning technology first fixing the vine with wireless sensors, then use the machine vision system on grape maturity of judgment, and to meet the use conditions of the grapes picked for picking manipulator. Grape picking robot performance was tested, by testing found that the robot with sensors of vine of accurate recognition rate reached more than 95%, their appreciation of the grape maturity reached more than 98%, high recognition rate,which is a relatively efficient grape picking robot.
Key words:grape harvest; autonomous navigation; color identification; leakage rate of mining; robot
文章編號:1003-188X(2016)07-0020-05
中圖分類號:S225.93;TP242
文獻標識碼:A
作者簡介:郭素娜(1981-),女,河南鄧州人,講師,碩士。通訊作者:劉志剛(1980-),男,湖北天門人,副教授,博士,(E-mail)fiberhome@126.com。
基金項目:國家自然科學基金青年基金項目(51305152)
收稿日期:2015-05-24
