穴盤苗斜楔塊片狀式取苗末端執(zhí)行器設計
2016-03-23 08:11:40毛罕平胡圣堯溫貽芳韓綠化儲建華高新浩
農機化研究 2016年7期
胡 靜,毛罕平,胡圣堯,3,溫貽芳,于 霜,韓綠化,儲建華,高新浩
(1.蘇州工業(yè)職業(yè)技術學院,江蘇 蘇州 215104;2.江蘇大學 現(xiàn)代農業(yè)裝備與技術教育部重點實驗室,江蘇 鎮(zhèn)江 212013;3.常州工學院,江蘇 常州 213022)
?
穴盤苗斜楔塊片狀式取苗末端執(zhí)行器設計
胡靜1,2,毛罕平2,胡圣堯2,3,溫貽芳1,于霜1,韓綠化2,儲建華1,高新浩1
(1.蘇州工業(yè)職業(yè)技術學院,江蘇 蘇州215104;2.江蘇大學 現(xiàn)代農業(yè)裝備與技術教育部重點實驗室,江蘇 鎮(zhèn)江212013;3.常州工學院,江蘇 常州213022)
摘要:取苗末端執(zhí)行器,是穴盤苗自動取苗機構的核心工作部件。為此,依據我國穴盤苗生產實際情況,設計了一種斜楔塊片狀式取苗末端執(zhí)行器。選擇72穴西葫蘆穴盤苗作為試驗測試對象,通過初步試驗對比分析了不同夾持手指的取苗效果,優(yōu)選出叉子形夾持手指取苗效果最好。同時,進行全因素試驗研究叉子形手指取苗特性,得出當手指長度L為130mm、插入深度h為30mm、夾持角度β為12°時,取苗末端執(zhí)行器的成功率達到95%,秧苗傷苗率為5%,兼顧取苗質量又減少了對秧苗的損傷。
關鍵詞:穴盤苗;移栽機;末端執(zhí)行器
0引言
穴盤苗技術是20世紀70年代中期在歐美國家率先發(fā)展起來的一種適合工廠化種苗生產的育苗方式,80年代中期引入我國,近年來得到空前發(fā)展。穴盤育苗移栽不僅具有普通移栽種植的特點,還可以節(jié)省種子、便于規(guī)范化管理、培育壯苗且移栽后沒有緩苗期,非常適合機械化栽植作業(yè),可有效減少勞動力,提高作業(yè)效率。
目前,我國穴盤苗栽植機械處于半機械作業(yè)水平,移栽過程中需要人工取苗喂入栽植機,移栽效率低、用工量大[1]。而取苗末端執(zhí)行器作為穴盤苗自動取苗機構的核心工作部件,直接和穴盤苗缽體接觸,在盡量不傷苗的情況下,將穴盤苗從穴盤孔穴中夾取出來。國內學者對穴盤苗自動移栽機的研究主要集中在取苗機構的研發(fā)上[2-6],僅僅實現(xiàn)了取苗的軌跡要求,沒有有效合理地設計取苗末端執(zhí)行器。
本文依據我國穴盤育苗實際情況,設計一種斜楔塊片狀式取苗末端執(zhí)行器,通過初步試驗對比分析不同型式夾持手指的取苗效果,優(yōu)選出適合我國穴盤育苗情況的最好夾持手指,再進行全因素試驗研究取苗特性,最終完成穴盤苗自動移栽機取苗末端執(zhí)行器設計。
1取苗末端執(zhí)行器設計
移栽機上的取苗末端執(zhí)行器,按夾持手指形狀,可分為片狀和針式。對針式取苗末端執(zhí)行器,按手指數量又可分為兩針式、三針式、四針式[7-8]。三針和四針式取苗可靠性優(yōu)于兩針式,但容易傷苗,且結構比較復雜。兩針式不易傷苗,但要求秧苗盤根充分,這樣才能將秧苗夾取出來[9]。對兩針式夾持,通過研究發(fā)現(xiàn)對育苗質量的要求很高,當苗缽盤根不好時,兩針夾持容易把苗缽夾碎,從而導致取苗失敗。
本文設計的取苗末端執(zhí)行器,采用片狀夾持手指,具體結構如圖1所示。

1.蓋板 2.固定塊 3.拉桿 4.壓縮彈簧 5.U型折板
取苗末端執(zhí)行器,包括蓋板、固定塊、拉桿、壓縮彈簧、U型折板、彈性片及斜楔塊。其中,鋼絲繩和拉桿固定連接,拉桿末端和斜楔塊固定,在拉桿的拉動下,斜楔塊沿拉桿方向滑動,使彈性片開合,從而夾取和釋放缽體。
如圖2(a)所示,取苗末端執(zhí)行器在取苗工作時,以與豎直方向成γ角度來執(zhí)行取苗動作,穴盤的受力如圖2(b)所示。取苗末端執(zhí)行器兩夾片以β角度夾緊缽體,將缽苗從穴盤中取出,這個過程缽體受到夾持手指方向摩擦力f1、f2,夾持手指法向載荷P1、P2,缽體所受拔苗力P,缽體側邊角度θ。力P的影響因素較多,包括缽體成分、含水率、缽體大小,與穴盤孔壁的粘附性等,P值可通過實驗測定平均值[10]。摩擦力f1、f2只考慮土壤滑移摩擦力。
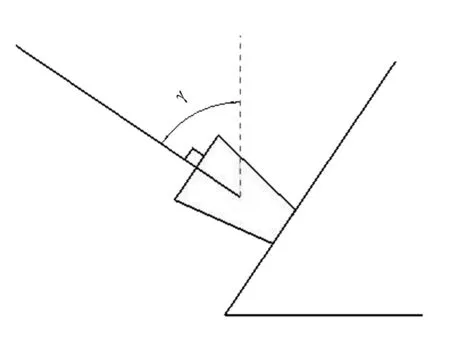
(a) 取苗示意圖
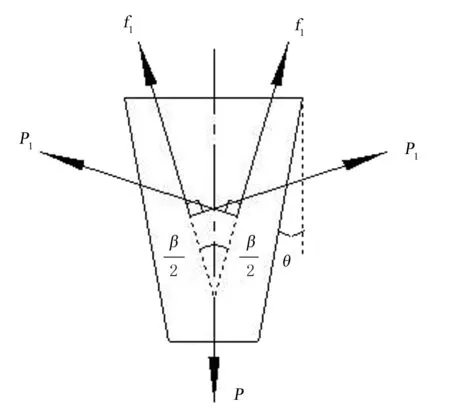
(b) 缽體受力分析
受力分析為
f1=f2
(1)
p1=p2
(2)
fi=upi(i=1,2)
(3)
(4)
聯(lián)立方程組解得
(5)
從式(5)可知:取苗末端執(zhí)行器夾持手指的夾持力,即夾持手指法向載荷P1、P2的大小,由P、β、μ3個因素決定,由于對同一種移栽對象拔苗力P、靜摩擦因數μ基本不變,所以夾持手指的夾持力主要由夾持角度β決定。
2取苗試驗設計
試制取苗末端執(zhí)行器樣機,將其安裝在導向槽取苗臺上,實現(xiàn)對穴取苗,如圖3所示。選擇72穴西葫蘆穴盤苗作為試驗測試對象,含水率為55%~60%。

圖3 取苗末端執(zhí)行器取苗試驗臺
2.1夾持手指型式
取苗末端執(zhí)行器夾持手指的形狀直接影響取苗的成功率,本試驗設計了3種夾持手指末端的形狀,如圖4所示。選用的材料是65錳鋼,1號和2號都是錐形手指,2號手指比1號手指寬,夾持力大于1號,3號手指為叉子形。
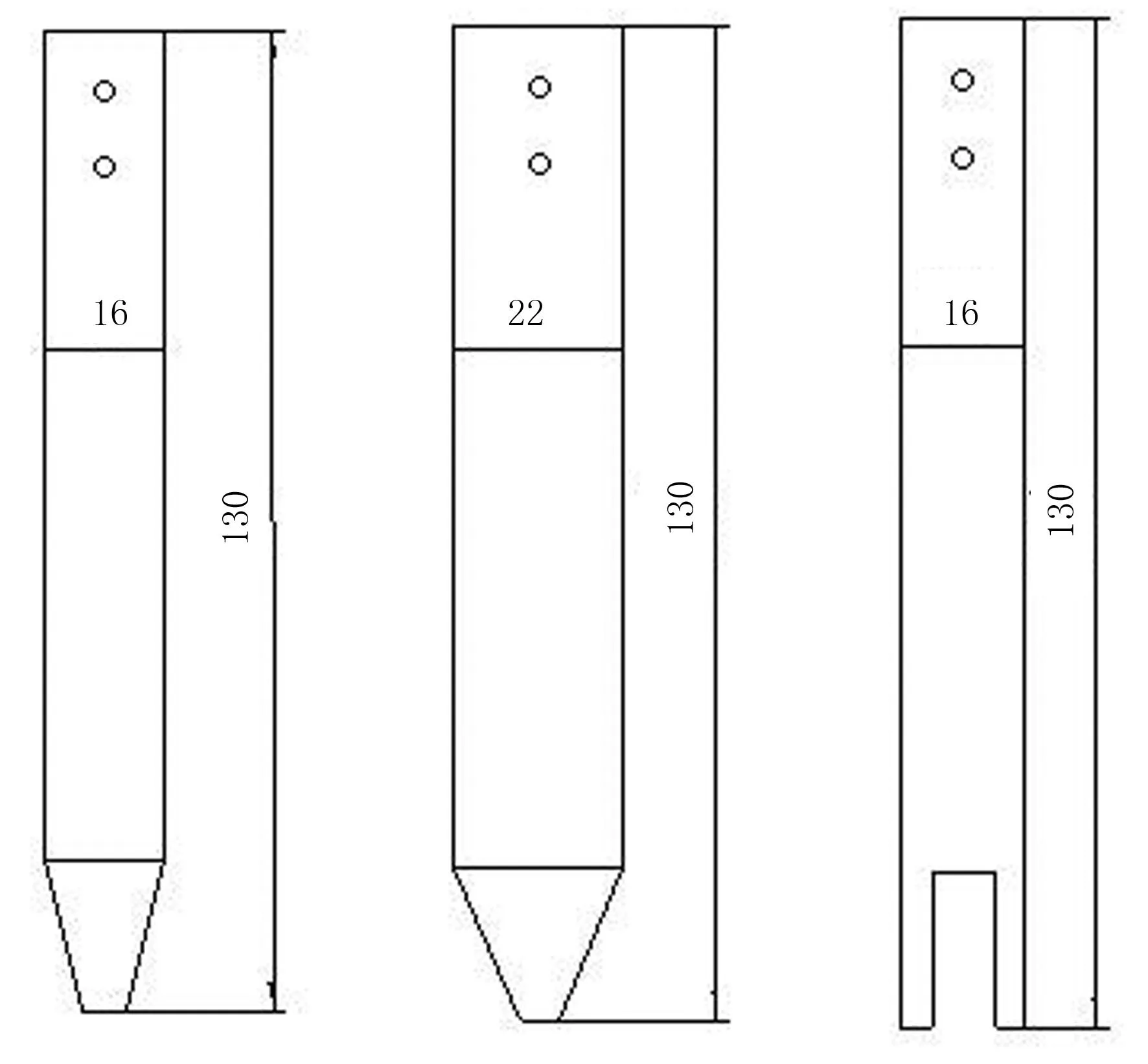
1號 2號 3號
2.2試驗參數
通過取苗末端執(zhí)行器夾苗分析,得出對同一種移栽對象缽體所受的拔苗力P、靜摩擦因數μ基本不變,夾持力主要由夾持角度β決定。此外,取苗時,取苗末端執(zhí)行器插入缽體中的深度h影響夾持力度,夾持手指長度L的不同會影響夾持片的剛度。所以,最終確定出取苗試驗的參數:夾持角度β,插入深度h,夾持手指長度L。取苗試驗參數設定如表1所示。
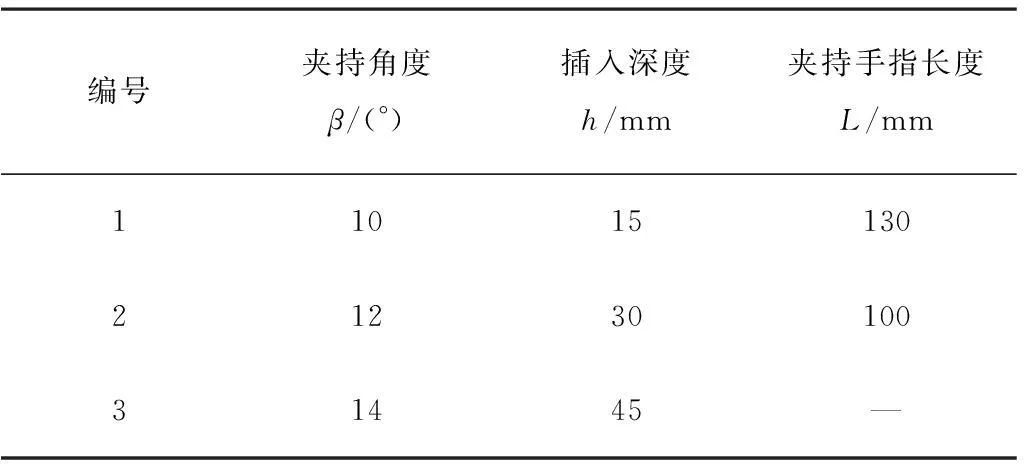
表1 取苗試驗參數
表中“—”內容為空缺,表示數據量少或無法實現(xiàn)。
調整參數的方法是:試驗時,通過調整斜楔塊在夾持手指中的位置來改變夾持角度β;通過調整移箱和取苗部件的相對位置來改變插入深度h;通過安裝不同長度的夾持手指來改變夾持手指長度L。
2.3評價指標
1)取苗成功率。取苗末端執(zhí)行器將秧苗從穴盤中取出并成功投苗,作為取苗成功的標準,即
2)取苗傷苗率。取苗末端執(zhí)行器在進行夾苗時,容易把缽體夾碎,在投苗過程中,滑塊推苗有可能會損傷苗莖或者葉子。由于現(xiàn)在還沒有傷苗標準,以把缽體破壞超過整體1/4、苗莖弄斷作為傷苗標準;而葉片的損傷不會太大程度影響秧苗的生長,可不作考慮。
計算式為
3取苗試驗與結果
3.1初步試驗
表2是不同型式夾持手指的取苗試驗結果。從表2可以看出:取苗成功率最高的是3號取苗片,最差的是2號取苗片;傷苗率最低的是3號取苗片,最高的是2號取苗片。2號取苗片末端采用錐形,與3號的叉子形相比,插入缽體中的面積較大,而缽體基本被根系盤繞住;2號取苗片很難充分插入土中,反而會將缽體壓碎,將根須切斷,導致取苗成功率差,傷苗率高。1號取苗片由于插入缽土中的面積比2號小,取苗成功率比2號略高,但傷苗率也比較高。通過對比,采用3號叉子形夾持手指,取苗效果最好,因此選擇3號叉子形夾持手指作為最佳方案。
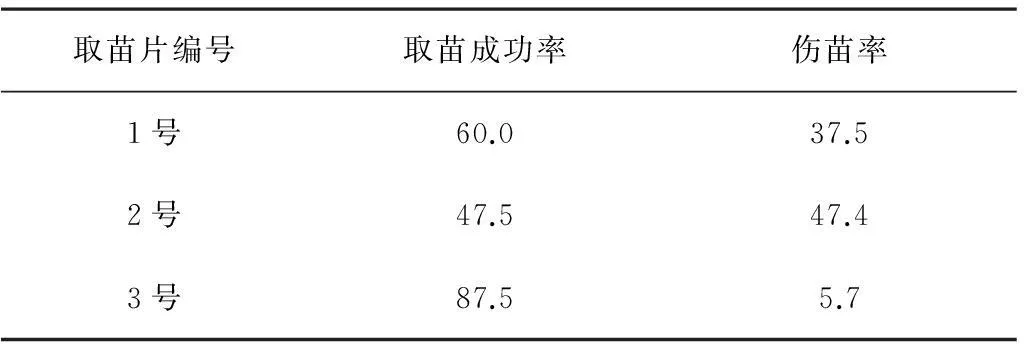
表2 不同夾持手指取苗試驗記錄
3.2最優(yōu)試驗
通過初步試驗分析,選擇3號叉子形夾片作為取苗末端執(zhí)行器的夾持手指,根據試驗設計的3個參數:夾持手指長度L、插入深度h、夾持角度β,進行全因素試驗,每組取苗的株數為20株。試驗結果如表3所示。
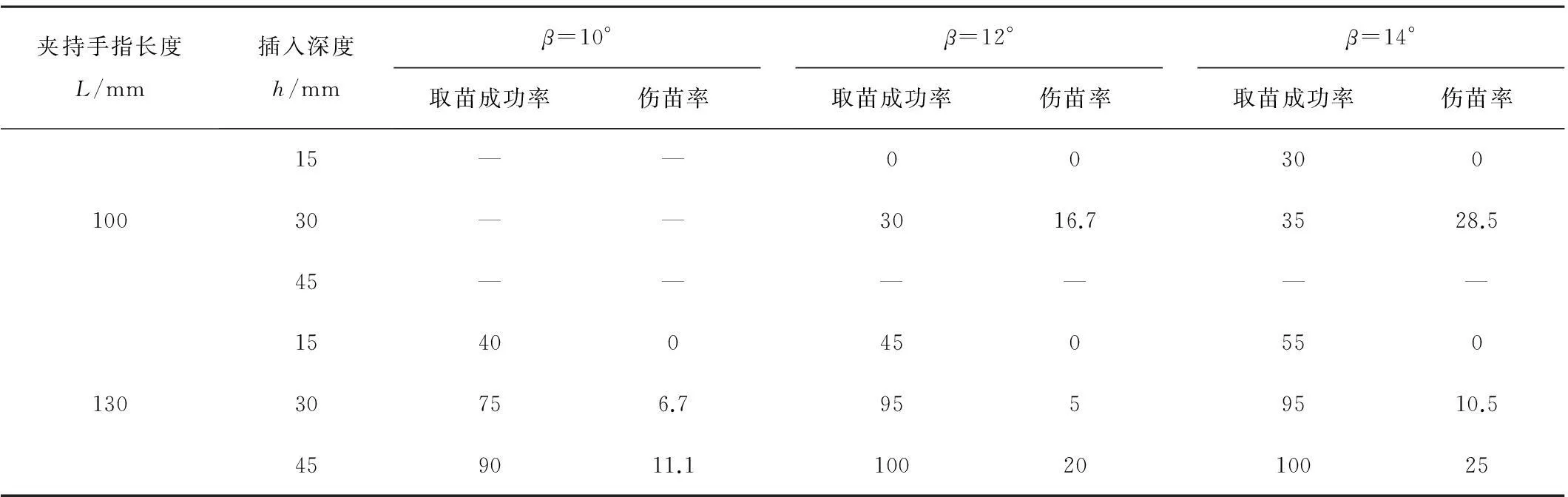
表3 取苗試驗記錄
表中“—”內容為空缺,表示數據量少或無法實現(xiàn)。
通過全因素試驗,當取苗末端執(zhí)行器的夾持手指長度為100mm時,取苗成功率很低。這是因為當取苗末端執(zhí)行器取苗時夾持力不夠,難以夾缽脫盤。當取苗末端執(zhí)行器的夾持手指長度為130mm,且插入深度為45mm時,取苗末端執(zhí)行器達到較高取苗成功率;但由于取苗末端執(zhí)行器插入較深,缽體容易被夾壞,并且隨著夾持角度β的增加,斜楔塊到取苗末端執(zhí)行器末端的距離越來越近,比較容易壓斷苗莖,導致傷苗率較高。當取苗末端執(zhí)行器的夾持手指長度為130mm、插入深度為15mm時,傷苗率具有較低數值,取苗成功率也比較低。這是因為取苗末端執(zhí)行器插入缽體的深度較淺,往往取不出苗缽,在攜苗投遞過程中,容易將苗缽甩出,從而不能成功將取出的苗缽投到栽植器接杯里,于是達不到理想的取苗移栽效果。
通過綜合對比,最佳的參數組合是夾持手指長度L為130mm、插入深度h為30mm、夾持角度β為12°,如圖5所示,在該參數組合下,取苗末端執(zhí)行器取出秧苗后苗的狀態(tài),秧苗基本上無損傷。

圖5 完成取苗后苗的狀態(tài)
4結論
1)對于斜楔塊片狀式取苗末端執(zhí)行器,夾持手指的夾持力主要由夾持角度β決定,此外,取苗時,取苗末端執(zhí)行器插入缽體中的深度h影響夾持力度,夾持手指長度L的不同會影響夾持片的剛度。
2)通過試制樣機進行初步取苗和最優(yōu)取苗試驗,得出當夾持手指長度L為130mm、插入深度h為30mm、夾持角度β為12°時,取苗末端執(zhí)行器的成功率達到95%,同時秧苗傷苗率最低,為5%。這一最優(yōu)組合兼顧取苗質量又減少對秧苗的損傷。
3)所設計的取苗末端執(zhí)行器僅僅對西葫蘆穴盤苗做了取苗效果試驗分析,達到了最優(yōu)取苗效果,滿足實際取苗要求,更多的試驗對象只需在最優(yōu)組合條件下作進一步研究。
參考文獻:
[1]張麗華,邱立春,田素博.穴盤苗自動移栽機的研究進展[J].農業(yè)科技與裝備,2009,10(5):28-31.
[2]張麗華,邱麗春,田素博,等.指針夾緊式穴盤苗移栽爪設計[J].沈陽農業(yè)大學學報,2010, 41(2):235-237.
[3]孫國祥,汪小旵,何國敏,等.穴盤苗移栽機末端執(zhí)行器設計與虛擬樣機分析[J].農業(yè)機械學報,2010,41(10):47-53.
[4]俞高紅,劉炳華,趙勻,等.橢圓齒輪行星輪系蔬菜缽苗自動移栽機構運動機理分析[J].農業(yè)機械學報,2011,42(4):53-57.
[5]葉秉良,余高紅,陳志威,等.偏心齒輪-非圓齒輪行星系取苗機構的運動學建模與參數優(yōu)化[J].農業(yè)工程學報,2011,27(12):7-12.
[6]MaoHanping,Ding Wenqin, Liu Fa, et al.Structure design and simulation analysis on the plug seedlings auto-transplanter[J].IFIP Advances in Information and Communication Technology, 2011, 344: 456-463.
[7]Edathiparambil Vareed Thomas. Development of a mechanism for transplanting rice seedlings[J].Mechanism and Machine Theory, 2002,37:395-410.
[8]Ting K C,Giacomelli G A, Ling P P. Workability and productivity of robotic plug transplanting workcell kcting[J].In Vitro Cell.Dev.Biol, 1992,28(1):5-10.
[9]Ting KC,Giacomelli G A,Shen S J.Robot workcell for transplanting of seedlings partⅡ-end-effector development[J].American Society of Agricultural Engineers,1990,33(3):1013.
[10]Yang Y, Ting K C,Giacomelli G A.Factors affecting performance of sliding-needles gripper during robotic transplanting of seedlings[J].ASAE,1991,7(4):493-498.
Abstract ID:1003-188X(2016)07-0133-EA
Design of a Sheet-typed End-effector with Oblique Wedge for Picking up Plug Seedlings in Automatic transplanting
Hu Jing1,2, Mao Hanping2, Hu Shengyao2, 3, Wen Yifang1, Yu Shuang1,Han Lvhua2, Chu Jianhua1, Gao Xinghao1
(1.Suzhou Institute of Industrial Technology, Suzhou 215104,China;2.Key Laboratory of Modern Agriculture Equipment and Technology, Ministry of Education, Jiangsu University, Zhenjiang 212013,China;3.Changzhou Institute of Technology, Changzhou 213022;China)
Abstract:End-effector for picking up seedlings is the core components of the automatic transplanters.A sheet-type picking seedlings end-effector by oblique wedge for plug seedlings was designed,which 72 zucchini plug seedlings was considered as testing subjects.Picking seedlings effect of different gripping fingers was analyzed by the initial tests, and then the best picking seedlings effect was with fork-shaped gripping fingers. By full factors’ picking seedlings testing for fork-shaped gripping fingers, when finger’s length is 130 mm, inserting depth is 30 mm, and gripping angle is 12 degree, the success rate of picking seedlings end-effector is up to 95% and injury rate of seedlings is 5%, which is good at both picking seedlings quality and less damage to plug seedlings. At last, picking seedlings end-effector for plug seedling automatic transplanting is designed.
Key words:plug seedlings; transplanter; end-effector
文章編號:1003-188X(2016)07-0133-04
中圖分類號:S223.92
文獻標識碼:A
作者簡介:胡靜(1984-),女,江蘇連云港人,博士,(E-mail)hujingyangran@126.com。
基金項目:國家自然科學基金項目(61233006、31201659、31401286);“十二五”國家科技支撐計劃項目(2014BAD08B03);江蘇省普通高校研究生科研創(chuàng)新計劃項目(CXZZ11_0581、CXLX13_67);江蘇高校優(yōu)勢學科建設工程項目(蘇財教[2014]37號);江蘇省高校自然科學基金(11KJB210001);江蘇省高校自然科學研究計劃項目(13KJD510001);農業(yè)部“948”項目(2004-Q1)
收稿日期:2015-07-04
