拖拉機半主動座椅懸架建模及控制研究
2016-03-23 02:24:38徐銳良李三妞郭志軍劉美洲羅躍輝
農機化研究 2016年1期
徐銳良,李三妞,郭志軍,劉美洲,倪 倩,羅躍輝
(1.河南科技大學 車輛與交通工程學院,河南 洛陽 471003;2.中國一拖集團有限公司 第三裝配廠,河南 洛陽 471004)
?
拖拉機半主動座椅懸架建模及控制研究
徐銳良1,李三妞1,郭志軍1,劉美洲1,倪倩1,羅躍輝2
(1.河南科技大學 車輛與交通工程學院,河南 洛陽471003;2.中國一拖集團有限公司 第三裝配廠,河南 洛陽471004)
摘要:為了改善拖拉機的乘坐舒適性,提出了將磁流變阻尼器應用于座椅懸架的新設計思路。為此,利用地面輸入模型、磁流變阻尼器模型和傳統被動座椅懸架模型建立了新型的半主動座椅懸架模型,并設計了PID控制器和模糊控制器,在MatLab/Simulink仿真環境下對半主動座椅懸架與被動座椅懸架進行仿真。仿真結果表明:半主動座椅懸架相比于傳統的被動座椅懸架,在減振方面效果明顯;而在兩種控制方法中,模糊控制效果最佳。
關鍵詞:座椅懸架;磁流變阻尼器;控制;仿真;拖拉機
0引言
中國是傳統的農業大國,而拖拉機及其改裝車是最傳統、最必不可少的農用機械。拖拉機在田間作業時存在路面不平、路況多變等客觀現實,而以往拖拉機座椅設備比較簡陋,為了改善乘坐舒適性,對拖拉機座椅的研究和改進成為必要。為此,可以從輪胎、車架和駕駛座3個方面實現減振,但要求改變駕駛座的系統動態特性時不會影響整車的其他性能[1],而且改變座椅性能應具有制造周期短、見效快及方便易行的優點。
目前,一些大馬力拖拉機為了提高乘坐舒適性,駕駛座采用了空氣彈簧的被動懸架。這種懸架雖然有一定減振作用,但由于它只是被動地去適應地面傳至座椅的振動[2],而且其阻尼特性是根據固定體重的駕駛員而設計的,這種懸架的缺點也非常明顯。由磁流變液(MRF)制成的磁流變液阻尼器(MRD)應用于座椅懸架上,可以有效耗散地面激勵引起的車輛對駕駛員的振動,改善乘坐舒適性[3];而且由于MRD具有響應快、造價低、壽命長、可調范圍大等優點,近年來受到人們極高關注。
因為被動座椅懸架的改善空間非常有限,不能有效地減小低頻段振動。所以,本文重點敘述在被動座椅懸架模型的基礎上構建半主動座椅懸架的模型來增加拖拉機乘坐舒適性的方法。同時,提出將MRD應用于拖拉機座椅懸架中,構建出阻尼可調的半主動座椅懸架模型,并采用PID控制和模糊控制策略進行Simulink仿真,驗證模型的正確性。
1建立各種模型
1.1座椅模型
本文采用某拖拉機的相關參數,結合理論動力學建模的基本理論和前人建模經驗[4-5],建立了1/2車型的五自由度振動模型。同時,在此基礎上,改座椅懸架的固定阻尼為可變阻尼,建立了基于磁流變阻尼器的半主動模型,如圖1所示。
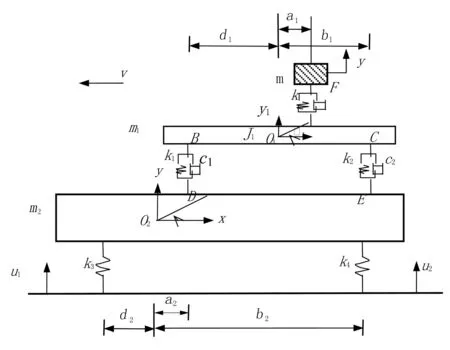
圖1 半主動座椅懸架模型
根據牛頓第二定律,被動模型和半主動模型的動力學方程分別為
(1)
(2)
1.2地面輸入模型
傳遞到拖拉機座椅的振動來源主要有發動機振動和地面輸入兩個方面。由于發動機運轉引起的周期振動及其高頻振動在很大程度上已經被座椅系統隔離,所以應主要探討由地面不平所引起的低頻范圍內的隨機振動[5]。根據田間路面不平、路況多變的實際情況,本文選取E級路面激勵為非公路田間崎嶇路面,采取車速為2km/h。其路面不平度的時域表達式見式(3),仿真框圖如圖2所示。
(3)
其中,q(t)為路面位移;G0為E級路面不平度系數;u為車輛前進速度;w為均值為0的高斯白噪聲;f0為下截止頻率[6]。
1.3磁流變阻尼器力學模型
參考Bingham粘彈-塑性模型,可以將磁流變阻尼器的阻尼力等效為基值阻尼與可控阻尼之和;而兩者分別與速度和電流相關[7],其表達式為
Fd=FM+Fv,Fv=ceVP
(4)
關于可控阻尼力與電流之間的復雜關系,因條件限制,本文無法進行試驗,且該部分不是本文研究的重點。因此,本文采用了文獻[8]的試驗數據,對其數據進行三階擬合得出阻尼力與電流的關系為
FM=0.2967I3-1.557I2+2.742I-0.2073
(5)

圖2 路面輸入模型
2控制策略
由于拖拉機乘坐舒適性是以駕駛員承受的加速度來評價的[9],因此本文以駕駛座的垂向加速度的均方根值(RMS值)最小作為控制的最終目標。MRD產生的阻尼力FM是輸入電流與座椅相對運行的非線性函數,所以選擇可調磁流變阻尼器運動產生的電流作為控制的目標[8],可以根據最終目標的變化進行實時調節控制,達到最優目標。基于前人研究成果及MRD的非線性特性,本文分別將PID控制、模糊控制應用于半主動座椅懸架系統中進行仿真,并與傳統被動模型進行對比分析。
2.1PID控制
PID控制器作為一種線性控制器,主要是根據偏差的變化情況來調節被控量的。本文采用位移式PID算法,算法表達式見式(6),其仿真框圖如圖3所示。
(6)
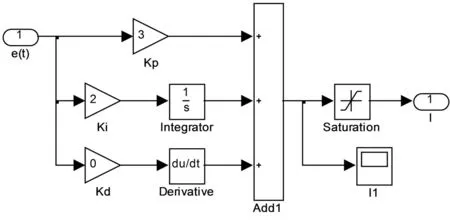
圖3 PID控制器
2.2模糊控制
在設計模糊控制器時,以拖拉機駕駛座的速度和速度變化率分別設定為控制器的兩個輸入E和dE,阻尼器的控制電流設定為輸出目標U;非模糊化(defuzzifi cation)采取重心法(centroid);E、dE、U的隸屬函數均采用三角函數;模糊子集的論域分別為[-2 2]、[-2 2]、[0 6];模糊子集分別為{NB(負大),NS(負小),Z(零),PS(正小),PB(正大)}、{NB(負大),NS(負小),Z(零),PS(正小),PB(正大)}、{Z(零),S(小),SM(小中),M(中),MB(中大),B(大)};模糊規則語句為“if A and B,then C”;模糊規則及模糊控制器如表1和圖4[10]所示。
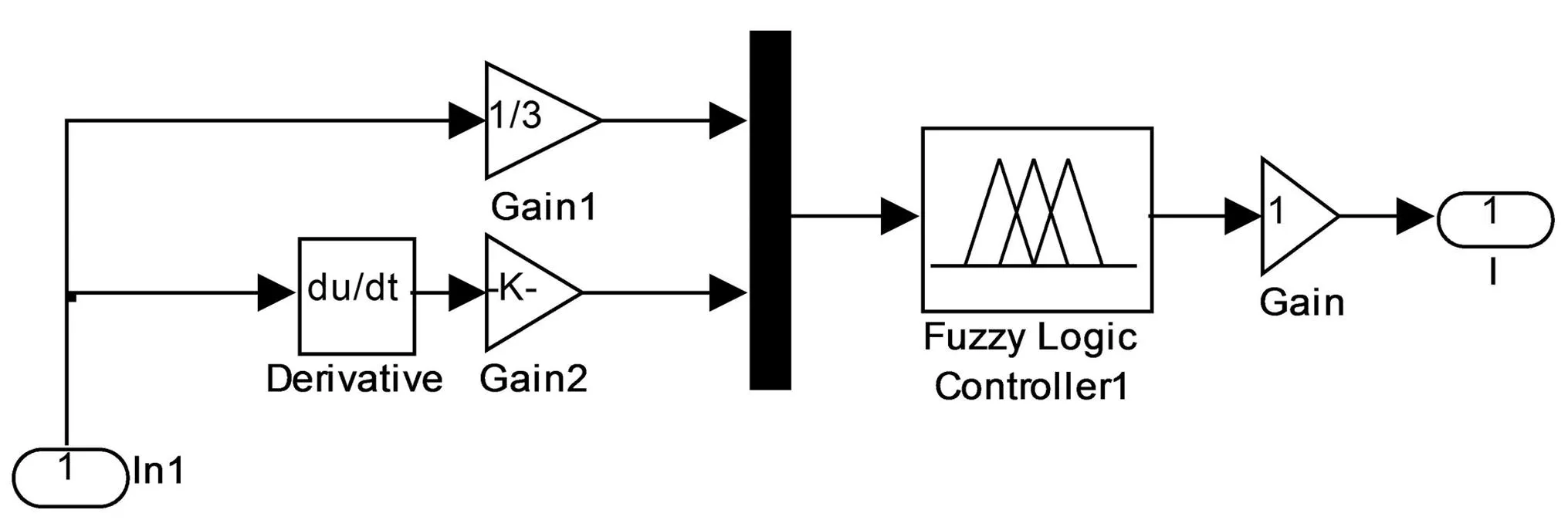
圖4 模糊控制器

dEENBNSZPSPBNBBMSMZNSMBSMSMSMSZMZZSMMPSSSSMMMSPBSMMSMBB
3基于MatLab/Simulink的仿真及分析
3.1仿真
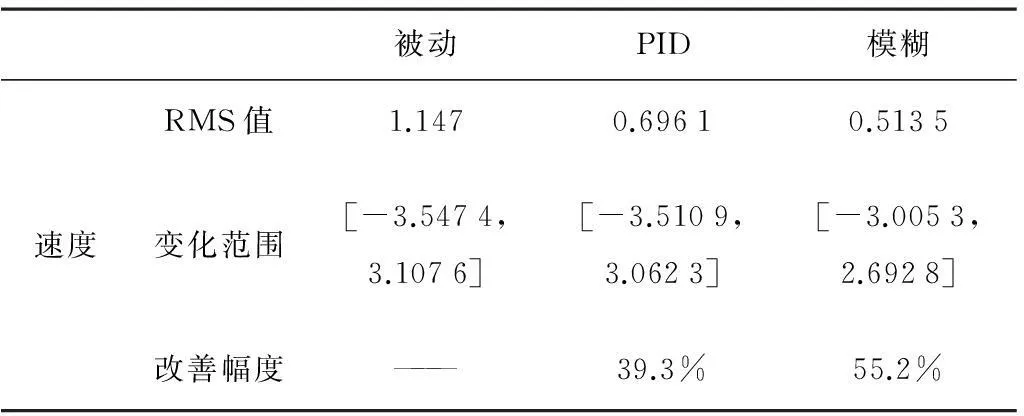
本文根據前面建立的地面輸入模型、磁流變阻尼器模型、“車-椅”動力學模型,以及PID控制器和模糊控制器模型,在Simulink環境中分別建立了被動控制、PID控制和模糊控制的仿真框圖,如圖5、圖6和圖7所示。同時,結合MatLab編程繪制仿真結果。為便于明顯觀察和對比分析3種控制,只截取仿真結果的其中一段圖像進行展示,并且將3種控制的加速度和速度分別繪于2個圖中。將3種控制的加速度及速度的均方根值、變化范圍和改變幅度制成表格形式,如表2所示。加速度仿真結果如圖8所示,速度仿真結果如圖9所示。
3.2分析
由圖8和圖9可知:當拖拉機行車路況發生改變時,PID控制和模糊控制策略均能很好地跟蹤模型。對比仿真結果圖8、圖9和均方根值表2可知:當白噪聲信號激勵路面時,基于兩種控制的磁流變半主動座椅懸架的座椅加速度和速度都遠小于傳統的被動座椅懸架;本文所建立的拖拉機五自由度模型正確可靠;采用磁流變阻尼器的半主動座椅懸架可以有效地衰減振動。表2中,對比PID控制、模糊控制下的座椅加速度、速度相對于傳統被動懸架的改善百分比和變化范圍可以看出:兩種控制都具有非常明顯的效果,而其中模糊控制為最佳。
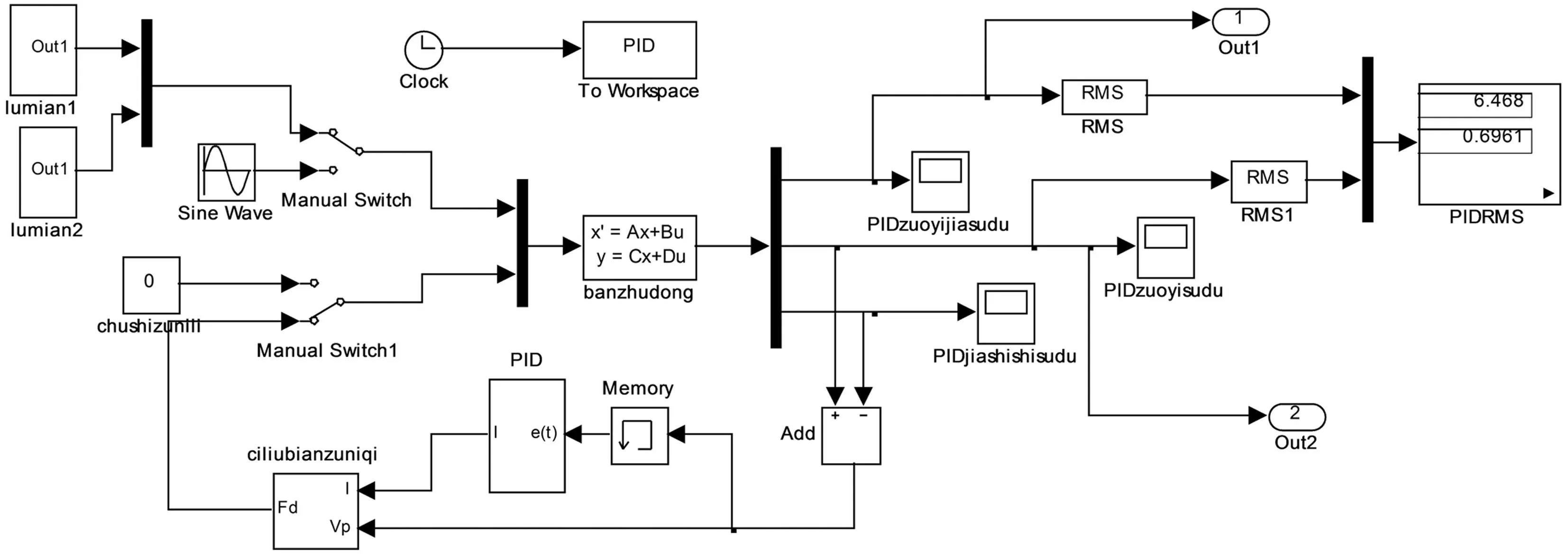
圖6 PID控制

圖7 模糊控制
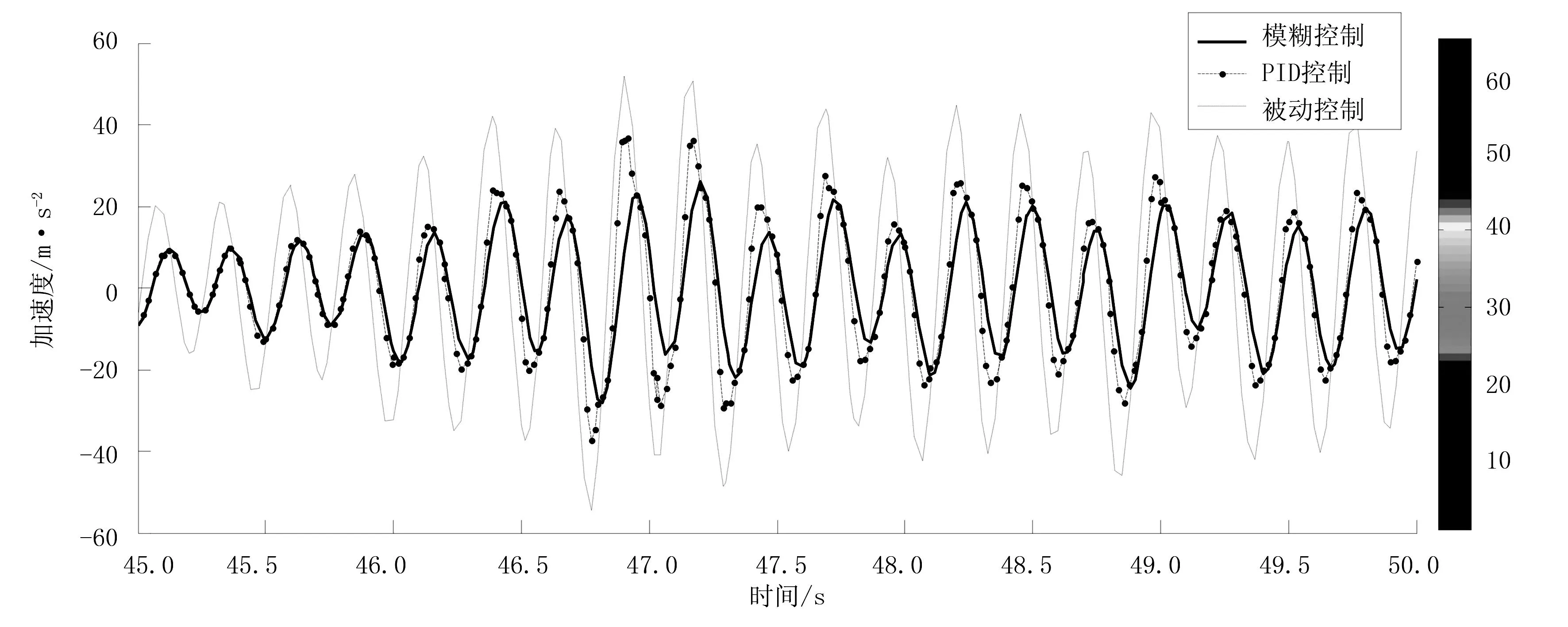
圖8 加速度仿真結果圖

圖9 速度仿真結果圖
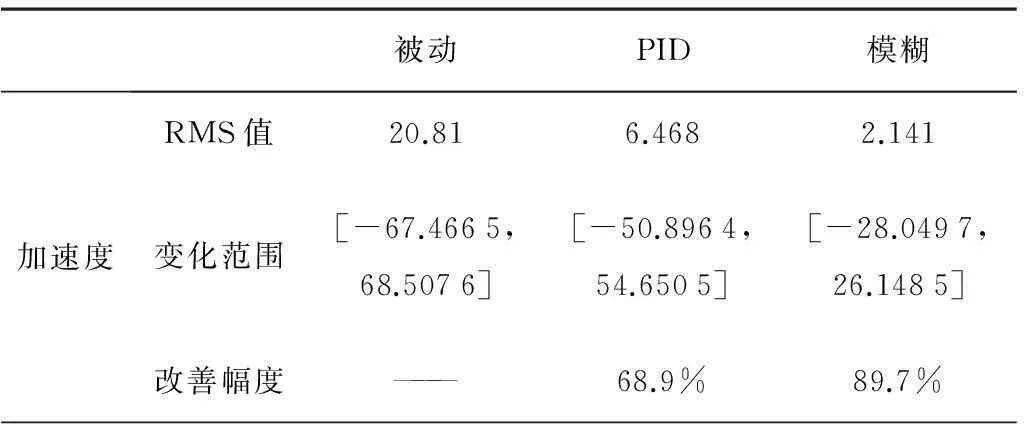
被動PID模糊加速度RMS值20.816.4682.141變化范圍[-67.4665,68.5076][-50.8964,54.6505][-28.0497,26.1485]改善幅度———68.9%89.7%
續表2
4結論
仿真結果表明:無論是PID控制,還是模糊控制,對基于磁流變阻尼器的拖拉機半主動座椅懸架系統都有非常有效的減振效果。本文建立的模糊控制模型中,存在運行速度偏慢的問題,初步判定原因是模型偏于復雜,這將是系統須進一步解決和完善的問題。本文所建立的基于磁流變阻尼器的拖拉機半主動座椅懸架模型為今后改進拖拉機的舒適性提供了一種現實可行的思路和方向,具有廣闊的應用前景。
參考文獻:
[1]黃斌,蔣祖華,嚴雋琪.汽車座椅系統動態舒適性的研究綜述[J].汽車科技, 2001(6):13-16.
[2]宋春桃.車輛座椅的磁流變液減振研究[D].南京:南京理工大學,2007:1-2.
[3]張志勇.半主動座椅懸架控制理論與實驗研究[D].長沙:湖南大學,2008:1-5.
[4]李華,戴錦軒.改善拖拉機乘坐舒適性的研究—拖拉機力學模型探討和座位參數的優化[J].北京農業機械化學院學報,1985(2):61-69.
[5]李華,戴錦軒.改善拖拉機乘坐舒適性的研究[J].農業機械學報,1985(4):13-24.
[6]喻凡.車輛動力學及其控制[M].北京:人民交通出版社,2003:23-24.
[7]薛念文,楊濤,江洪.基于磁流變減振器的半主動車輛座椅懸架的控制仿真研究[J].拖拉機與農用運輸車,2010, 37(3):12-13.
[8]楊濤.基于磁流變阻尼器的座椅懸架設計與仿真[D].鎮江:江蘇大學,2010:19-20.
[9]潘公宇,潘秋華.用磁流變液阻尼可調減振器改善車輛座椅特性的研究[J].工程機械,2007,38 (10):32-35.
[10]馮海生.基于磁流變阻尼器的半主動車輛座椅懸架研究[D].哈爾濱:東北林業大學,2010:42-45.
Modeling and Control of Tractor Semi-active Seat Suspension System
Xu Ruiliang1, Li Sanniu1, Guo Zhijun1, Liu Meizhou1, Ni Qian1, Luo Yuehui2
(1.Vehicle & Motive Power Engineering College, Henan University of Science and Techonology, Luoyang 471003,China;2. Third Assembly Plant,YTO Group Corporation, Luoyang 471004, China)
Abstract:A new idea is designed of applying MRD with the seat suspension to enhance comfort of tractor.The random roughness of road surface input model,the MRD model and the passive seat suspension model are used to establish this semi-active seat suspension system,the PID controller and the fuzzy controller.With the Matlab / Simulink software,the dissertation has a completed simulating analysis between semi-active seat suspension and traditional passive seat suspension. The simulation results indicate that the semi-active suspension is better than the passive seat suspension in restraining the vibtation and enhancing the comfort,and the fuzzy controller is better than the PID controller.
Key words:seat suspension;magneto-rheological damper;control;simulation;tractor
文章編號:1003-188X(2016)01-0039-05
中圖分類號:S219.032.9
文獻標識碼:A
作者簡介:徐銳良(1966-),男,河南洛陽人,副教授,碩士生導師,(E-mail )lyxrl@163.com。通訊作者:李三妞(1989-),女,河南新鄉人,碩士研究生,(E-mail )1054945965@qq.com。
基金項目:國家高技術研究發展計劃項目(2012AA111204)
收稿日期:2015-01-15
猜你喜歡
科技資訊(2016年18期)2016-11-15 20:09:22
數字技術與應用(2016年9期)2016-11-09 23:25:33
數字技術與應用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49
中國科技博覽(2016年18期)2016-10-19 08:43:03
科技視界(2016年21期)2016-10-17 17:06:18
商(2016年27期)2016-10-17 05:41:05
大眾理財顧問(2016年9期)2016-10-11 17:10:17
科技視界(2016年20期)2016-09-29 13:07:14
