采摘機器人執行端機械結構優化和電量模糊控制設計
2016-03-23 06:45:01呂俊霞李玉華汪小志鮑秀蘭
農機化研究 2016年6期
呂俊霞,李玉華,汪小志,鮑秀蘭
(1.河南工業職業技術學院 機電工程系,河南 南陽 473000;2.南昌工學院,南昌 330108;3.南昌大學 資源環境與化工學院,南昌 330031;4.華中農業大學,武漢 430070)
?
采摘機器人執行端機械結構優化和電量模糊控制設計
呂俊霞1,李玉華1,汪小志2,3,鮑秀蘭4
(1.河南工業職業技術學院 機電工程系,河南 南陽473000;2.南昌工學院,南昌330108;3.南昌大學 資源環境與化工學院,南昌330031;4.華中農業大學,武漢430070)
摘要:末端執行器是果蔬采摘機器人的另一重要部件,通常被認為是機器人的核心技術之一。為了提高采摘機器人執行末端的工作效率,增加機器人的有效作業時間,提出了一種新的優化方法。該方法將采摘機器人執行末端采用伺服電機控制,對機器人的電量進行實時顯示,以備及時充電;對機械手在運動學上進行優化設計,采用模糊控制理論實現了執行末端輸出功率和電量的模糊控制。該設計縮短了采摘機器人執行末端的響應時間,降低了果實破損率,提高了作業的有效時間,為采摘機器人的現代化和自動化設計提供了較有價值的參考。
關鍵詞:采摘機器人;執行末端;輸出功率;模糊控制
0引言
獲得果實和分離果實是采摘機器人末端執行結構的兩個主要任務,主要通過抓取、吸收和勾取等方式完成,同時用扭斷和剪切等方法實現果實和果更梗的分離。一般來說,果實的獲取方法主要分為夾持類和非夾持類,分離果實與果梗的方式有傳統的扭斷、折斷、拉斷及通過剪刀或切刀進行切斷,還有新式的熱切割方法等。
圖1為美國研發的一款西紅柿采摘機器人的執行末端。該機器人的執行末端是夾持類執行末端,本文設計的果實采摘機器人也采用夾持類執行末端。
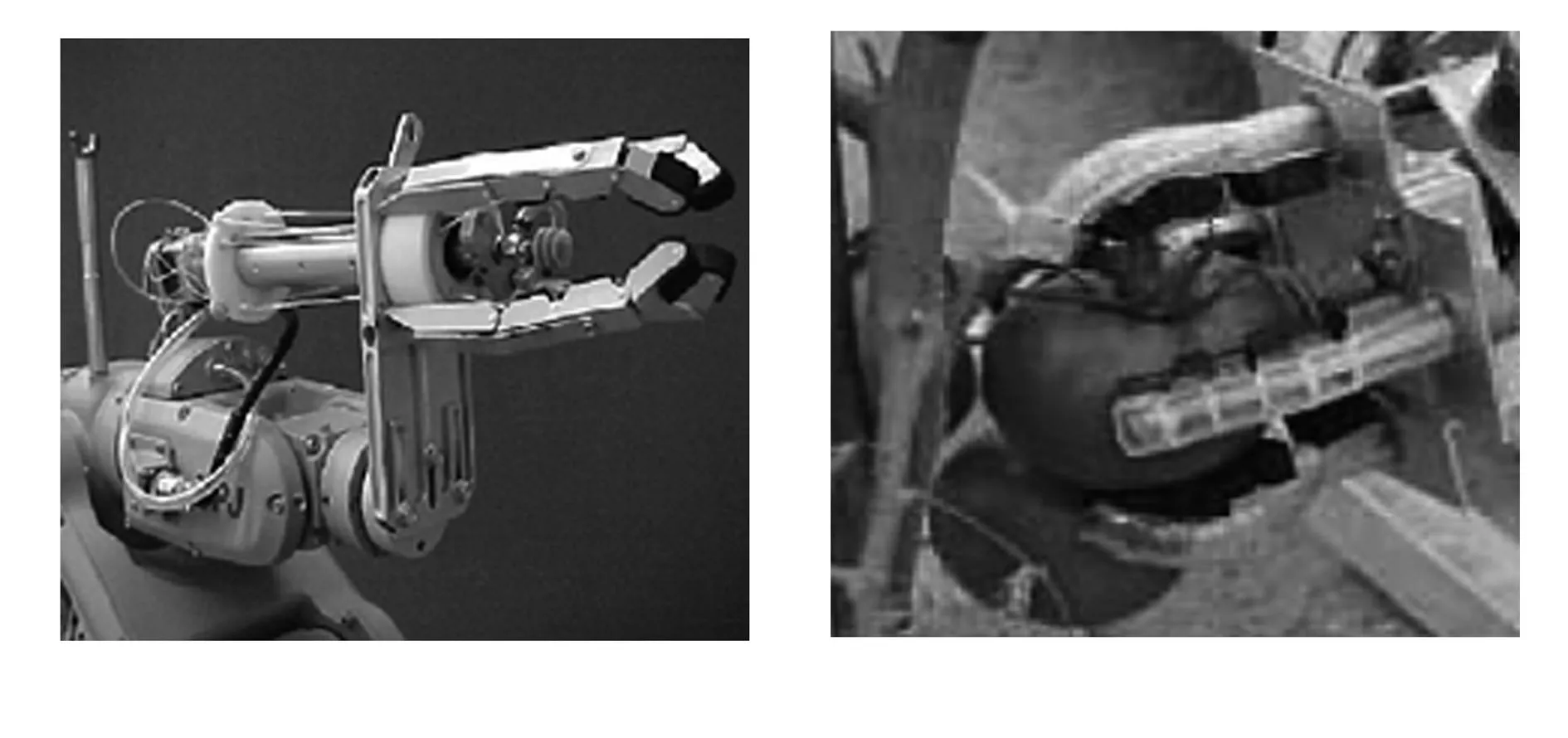
圖1 采摘機器人末端執行器
1采摘機器人執行末端機械結構設計
為了完成果實的采摘任務,選取了夾持類抓取工具作為采摘機器人的機械執行末端,其材料應用可變形材料,大大提高了變形的適應能力,避免了快速抓取帶來的損害。抓取結構示意圖如圖2所示。
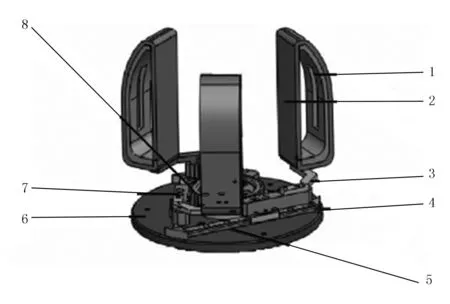
1.機械爪 2.彈性材料硅膠 3.連接桿 4.止動塊
圖3為采摘機器人執行末端的抓取結構。其中,在兩指上使用了橡膠等可變形材料,防止對果實產生機械損傷。手指的夾持結構采用伺服電機機械控制,利用錐齒輪傳動,實現運動過程。
在采摘機器人的采摘作業過程中,主要使用直流伺服電機進行控制,采摘任務主要通過兩個動作來完成:一是攝像機的果實定位過程,二是機械抓取過程。采摘機器人的攝像機部分采用eye-in-hand方式安裝。假設目標果實在基坐標系內的坐標為(Xbo,Ybo,Zbo),其在攝像機坐標系內的坐標為(Xg,Yg,Zg),與其在攝像機成像平面上的2D坐標(X1,Y1)之間的關系為
(1)
其中,f為攝像機的焦距。
采摘機器人在運動學上可以將結構簡化,如圖4所示。

1.手指 2.真空波紋吸盤 3.雙向螺桿
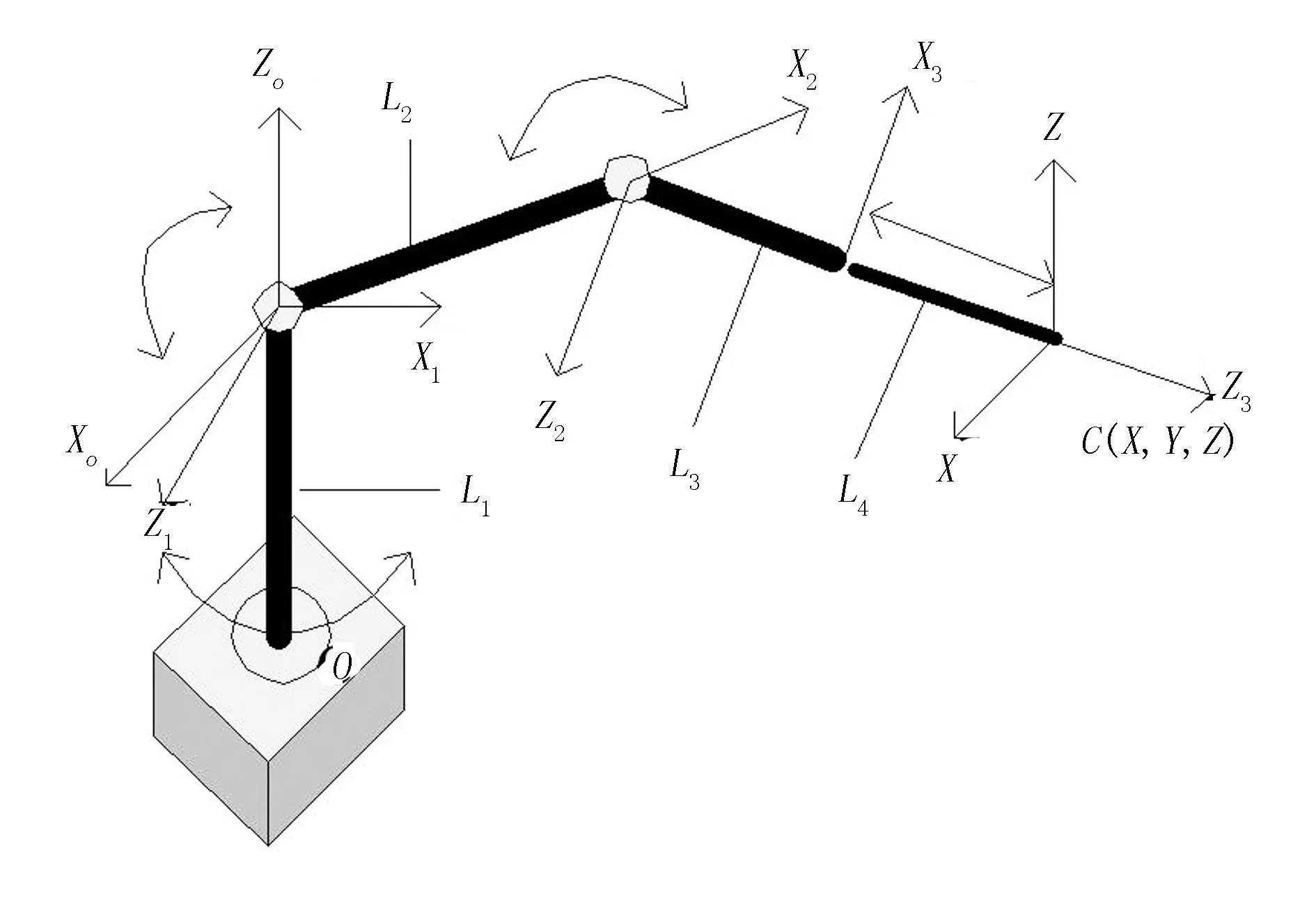
圖4 采摘機器人結構示意圖
利用該簡化模式,可以對機器人基坐標和攝像機坐標進行位置轉換,利用幾何方法可以得到如圖5的幾何關系圖。
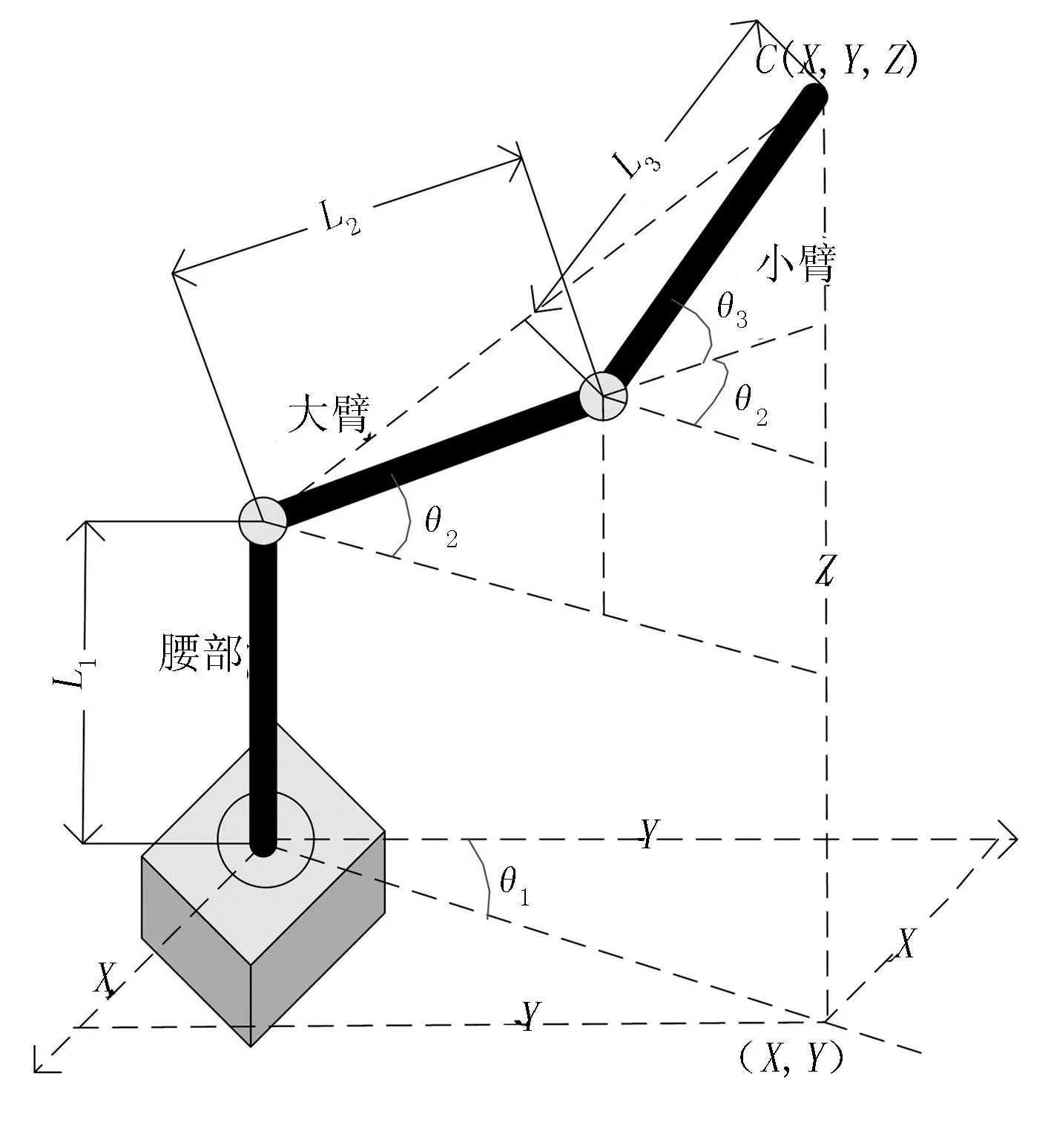
圖5 采摘機器人關節幾何關系圖
由圖5可得
X={L22+L32-2×L2×L3×cos(π-θ3)-[L2×
sinθ2+L3×sin(θ2+θ3)]2/(1+tg2θ1)}1/2
(2)
Y=X×tgθ1
(3)
Z=L1+L2×sinθ2+L3×sin(θ2+θ3)
(4)
其中,L1、L2、L3為采摘機器人腰部、大臂、小臂的長度;θ1、θ2、θ3為采摘機器人2、3、4空間自由度。
據此可以得到果實在基本坐標系(Xbo,Ybo,Zbo)內與其在攝像機坐標內的關系為
Xg=Xbo-X,Yg=Ybo-Y,Zg=Zbo-Z
(5)
為了實現采摘機器人執行末端的運動學優化設計,可針對伺服電機對運動結構進行優化。電機的轉速計算公式為
n=(線速度×60×減速比)/(2×pi×軸半徑)
(6)
則末端執行機構的計算功率為
(7)
根據計算功率,可以合理地選擇電機。根據輸出功率方面進行選擇,則有
(8)
其中,Fω為工作機阻力;vω為工作機的線速度;ηω為工作機的效率;Fω=μN,μ表示輪與地面之間的摩擦因數。
2機器人電池電量精確顯示和模糊控制
現在的機器人在待機時電流很大,電量的消耗非常快,因此電池的壽命都比較短暫。為了將電池的壽命延長,推出了各種解決方案。通用的方法如下:通過計算電池的電壓、電流、電路、溫度及電池的時間得到電池的電量,使用這樣的方法,電量的顯示用百分數來計量,并且需要精度非常高的放大器、儲存器及電流感應的電阻器。采摘機器人執行末端伺服直流電機電池為二次充放電電池,其特性如表1所示。
在多數便攜應用中,需要隨時了解電池剩余容量以估算電池使用時間,其庫侖計法如圖6所示。
庫侖計法對電池的剩余電量的估算方法是通過對流入和流出的電流凈電荷來進行估算。使用這樣的方法對流入和流出的電池總電流來進行積分,最終所得到的靜電荷數就是剩余的電池容量。電池的容量可以進行預置,也可以后期在充電完整周期當中進行學習。通過對電池的自放電進行補償,使容量隨著溫度的變化而變化,最終可以獲得讓人比較滿意的精度。電池電量計將流入和流出的電池總電流持續進行積分,最終把積分所得到的凈電荷數當作所剩余的容量。其中,RSNS是mΩ級的檢流電阻,RL是負載電阻。電池通過RSNS、開關對RL放電時的電流I0在RSNS的兩端所產生的壓降為VS(t)=I0(t)×RSNS。電量計將持續檢測RSNS兩端所產生的壓差VS,并將它通過ADC轉換為N位數字量Current(簡稱CR),之后用時基確定的速率對其進行累加,M位累加結果Accumulated_Current(簡稱ACR)的單位是Vh(伏時)。將量化后的VS最終進行累加,相當于對它進行了積分,則電池電量的結果為
(9)
因此,將ACR值除以檢流電阻RSNS的阻值即得到以Ah(安時)為單位的電池容量。ADC轉換結果和累加后的結果都帶有符號位,按照圖1中的連接方式,充電時CR為正,ACR遞增;放電時CR為負,ACR遞減。外部微控制器可以讀取CR和ACR值,經過換算得到真實的充放電電流和電量值。在機器人電池工作過程中,電池容量受溫度的影響,平臺加溫度補償電路如圖7所示。
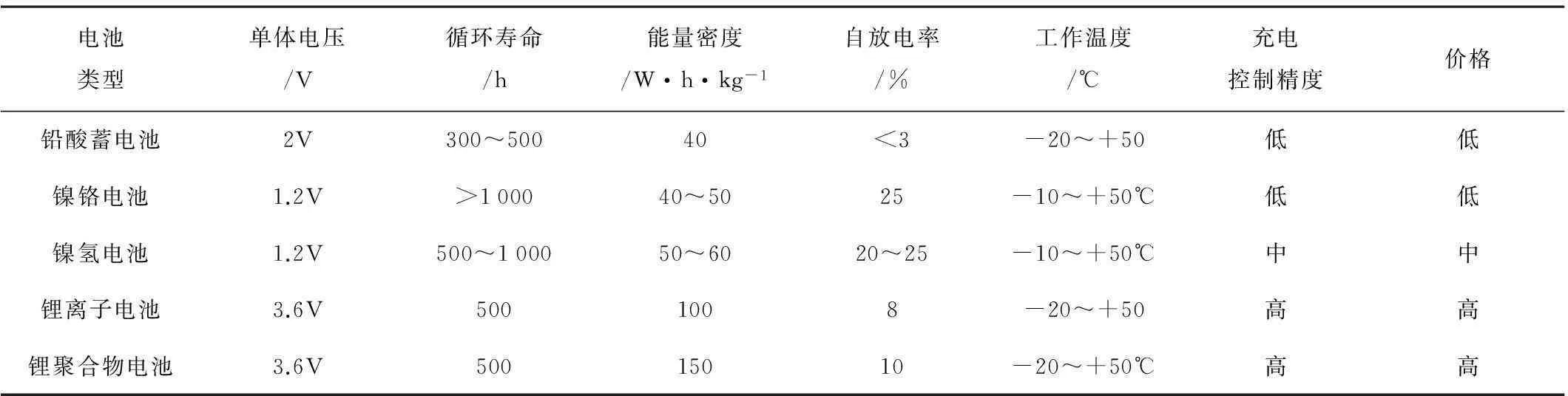
表1 二次充放電電池特性數據表

圖6 庫侖發設計過程示意圖

圖7 溫度補償示意圖
在圖7中的NTC電阻的B值在2 000~6 000k之間,這里的溫度系數為k。對B組的值不能用越大越好或者越小越好來衡量,應主要看在什么地方使用。一般來說,作為溫度補償、溫度測量和抑制浪涌電阻所使用用的產品,在相同條件下是B組越大越好。原因是:隨著溫度變化,電阻值的變化隨著B組值的增大而增大,從而更加靈敏。
為了對機器人的電量和輸出功率進行聯合控制,達到節能的效果,對執行末端采用模糊控制,以電量作為輸入端,以輸出功率作為輸出端,其結構示意圖如圖8所示。
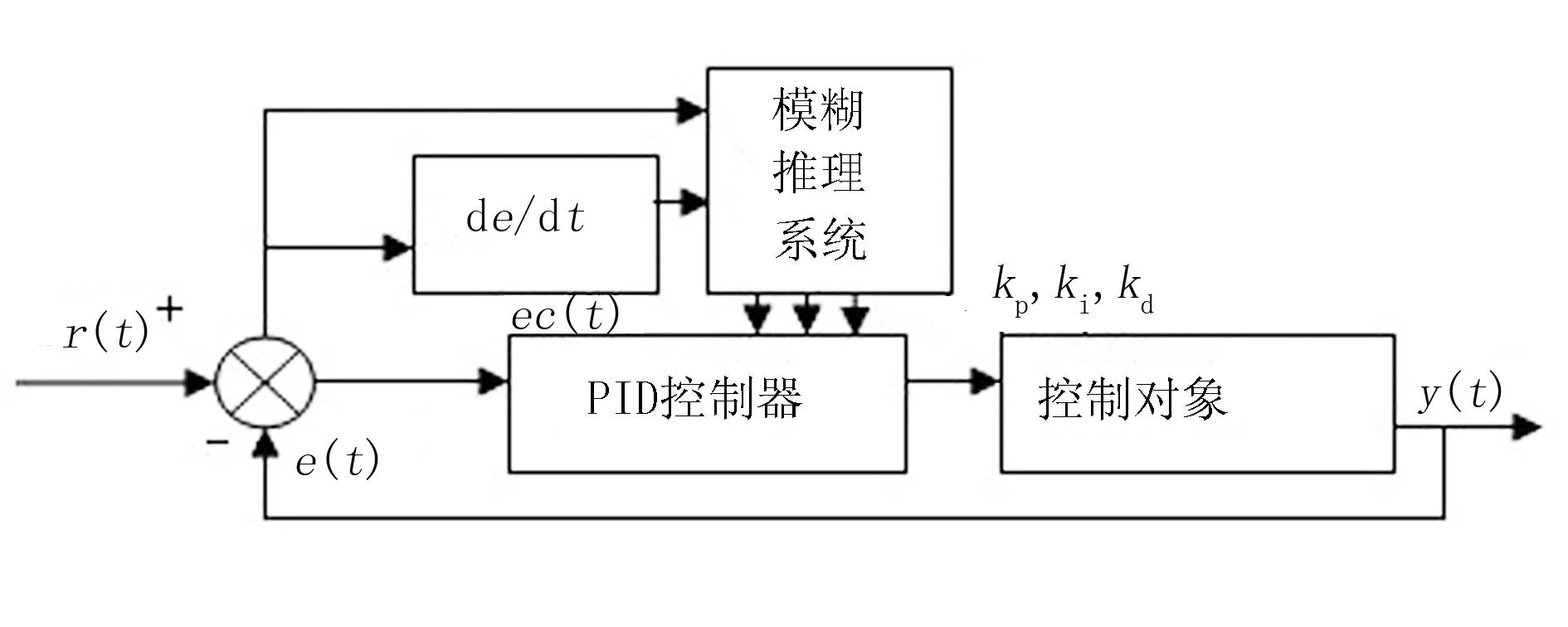
圖8 運動學模糊控制示意圖
3機器人執行末端性能測試結果與分析
為了測試采摘機器人執行末端機械優化的有效性和可靠性,本次研究采用機器人大棚草莓采摘試驗的形式,對優化前后的機器人進行測試,過程如圖9所示。
在相同實驗大棚內對優化前和優化后的果實采摘機器人效果進行了測試,在對比測試之前,首先測試機器人的響應實現,結果如圖10所示。

圖9 機器人測試示意圖
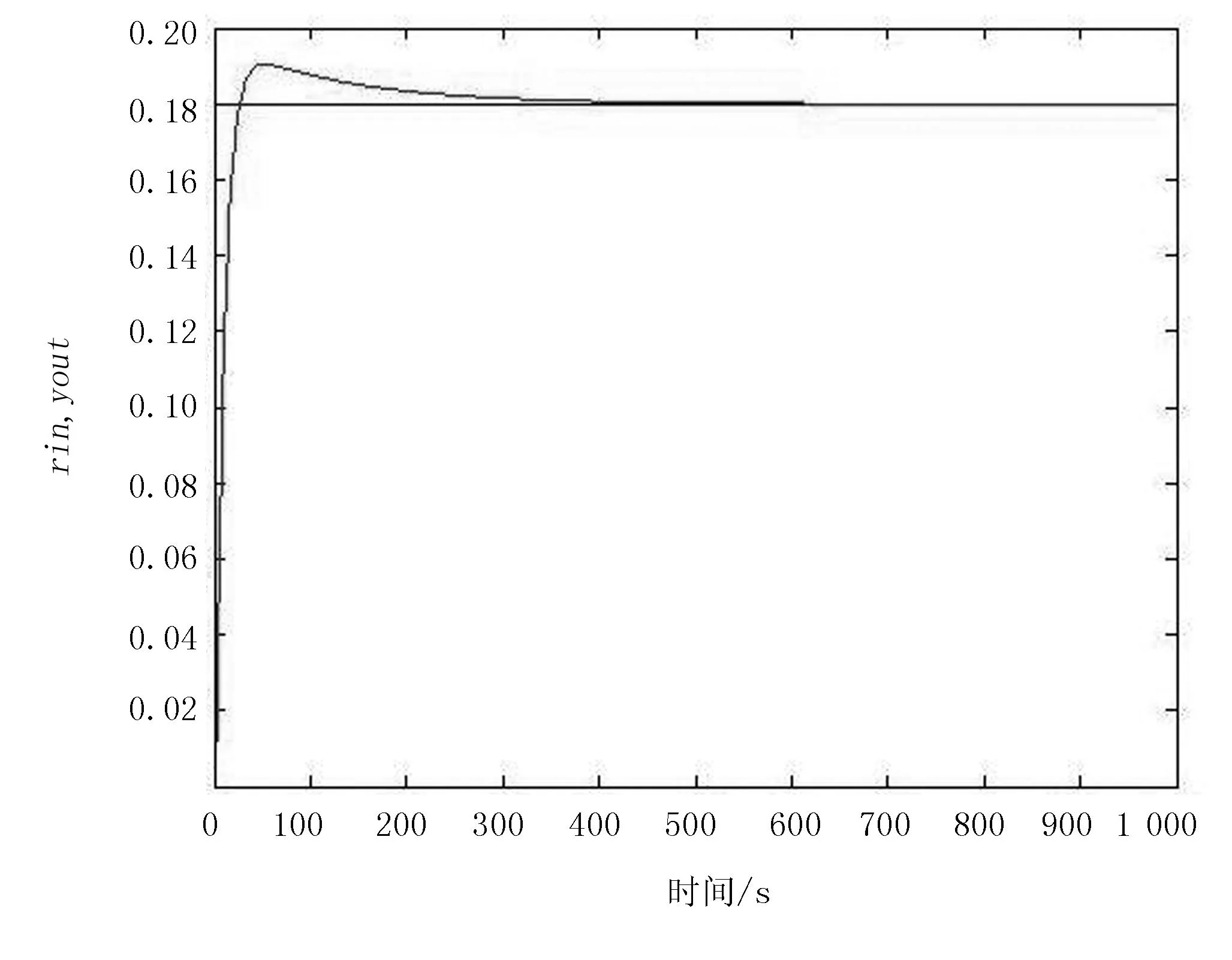
圖10 采摘機器人執行末端響應時間
由圖10可以看出:采摘機器人采用模糊控制后,響應時間較短,魯棒性較好,響應過程平穩。通過響應時間和優化前機器人的比較,得到了如表2所示的結果。
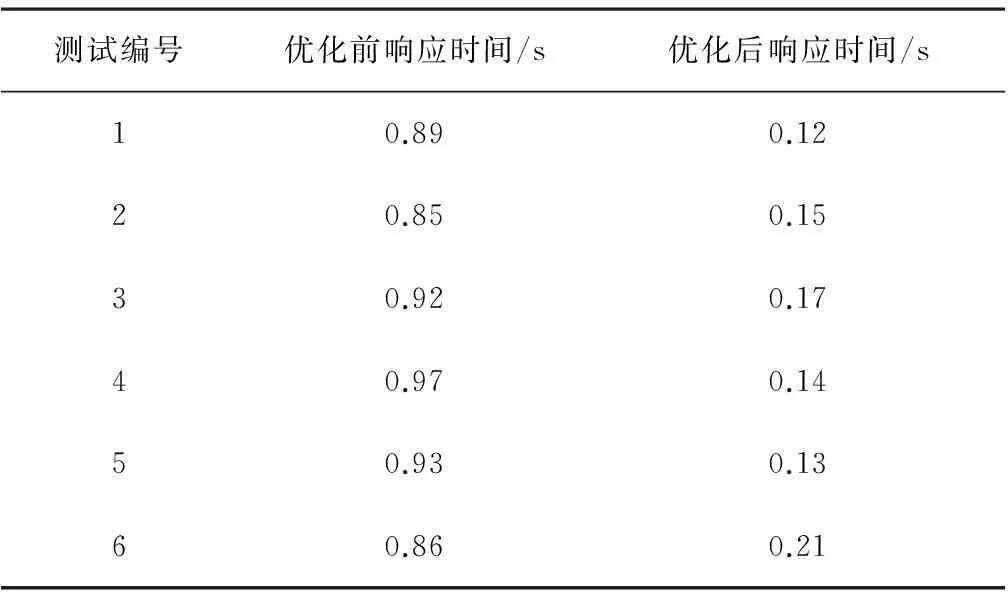
表2 優化前后響應時間測試結果
由表2可以看出:相對于優化前的執行末端,優化后響應時間更短,從而大大提高了機械作業效率。
表3表示采摘機器人執行末端的總體測試數據。由表3可以看出:優化后機器人執行末端表現出了優良的特性,在破碎率和漏率上都有所降低,作業時間也大大縮短,從而驗證了該機器人的果實采摘的高效和可靠性。
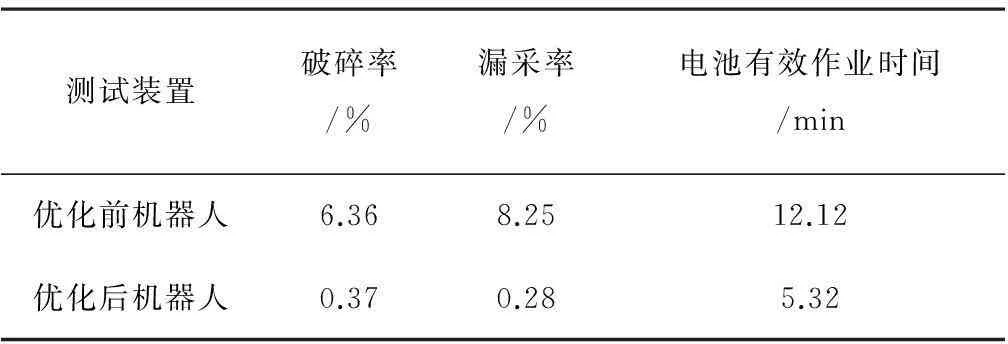
表3 機器人執行末端測試數據
4結論
為了提高采摘機器人執行末端伺服電機電池的有效作業時間、降低果實采摘的漏采率和破碎率,提出了一種新的機器人執行末端優化方法。該方法采用模糊控制理論實現了電池和執行末端的聯合控制,建立了攝像機和執行末端的運動學坐標;通過對電池電量的實時顯示功能,實現了電量的優化配置;通過對輸出功率的優化,實現了節能的效果。
為了測試采摘機器人執行末端機械優化的有效性和可靠性,通過大棚草莓采摘試驗對機器人進行了測試。測試發現:優化后大大縮短了采摘機器人執行末端的響應時間,且降低了果實的破損率,提高了作業的有效時間,從而驗證了該機器人的果實采摘的高效和可靠性。
參考文獻:
[1]胡煉,羅錫文,曾山,等.基于機器視覺的株間機械除草裝置的作物識別與定位方法[J]. 農業工程學報,2013(10):22-27.
[2]何東健,喬永亮,李攀,等.基于SVM-DS多特征融合的雜草識別[J].農業機械學報,2013(2):151-157.
[3]宋懷波,何東健,潘景朋.基于凸殼理論的遮擋蘋果目標識別與定位方法[J].農業工程學報, 2012(22):56-70.
[4]彭衛繪,談樂斌.基于MATLAB的粘連小球球徑提取方法[J].計算機系統應用,2012(6):251.
[5]張春龍,黃小龍,劉衛東,等.苗間鋤草機器人信息獲取方法的研究[J]. 農業工程學報,2012(9):55-59.
[6]金小俊,陳勇,侯學貴,等.基于機器視覺的除草機器人雜草識別[J]. 山東科技大學學報:自然科學版, 2012(2):112-117.
[7]高國琴,王威,丁琴琴.農業并聯機器人同步滑模控制[J]. 農業機械學報,2012(9):241-247.
[8]周俊,趙高陽,劉銳,等 .基于粒子濾波的蘋果采摘機器人目標姿態估算 [J].農業機械學報,2011,42(3):161-165.
[9]謝志勇,張鐵中.基于 RGB 彩色模型的草莓圖像色調分割算法[J].中國農業大學學報,2006,1l(1):84-86.
[10]趙鵬,趙德安.雙目立體視覺在果樹采摘機器人中的應用[J].農機化研究,2009,31(1):212-214.
[11]王磊,段會川.Otsu方法在多閾值圖像分割中的應用[J].計算機工程與設計,2008,29(11):2844-2845, 2972.
[12]戚繼忠,王自強.基于 ARM7TDMI 實現 CF 卡存儲的文件系統設計[J].微處理機,2007(1):114-115.
[13]秦培龍,李國,李艷紅.基于 S3C44B0X 的 Bootloader 設計與實現[J].微計算機信息,2008(2):153-155.
[14]謝志勇,張鐵中,趙金英.基于 Hough 變換的成熟草莓識別技術[J].農業機械學報,2007,38(3):106-109.
[15]王東,趙宇,王秀紅.一種改進的DFT迭代的MIMO-OFDM系統信道估計算法[J].應用科技,2009,3(3):19-22.
[16]徐文穎,張靜,董建萍.導頻信道估計中的插值算法[J].上海師范大學學報,2007,12(6):41-46.
[17]張鐵中,楊麗,陳兵旗,等.農業機器人技術研究進展[J].中國科學:信息科學,2010,40(S1):71-87.
[18]畢昆,趙馨,侯睿鋒,等 . 機器人技術在農業中的應用方向和發展趨勢 [J].中國農學通報,2011,27(4):469-473.
[19]周俊,劉銳,張高陽.基于立體視覺的水果采摘機器人系統設計[J].農業機械學報,2010,41(6):158-162.
[20]宋健,孫學巖,張鐵中,等.開放式茄子采摘機器人設計與試驗[J].農業機械學報,2009,40(1):143-147.
[21]趙慶波,趙德安,姬偉,等.采摘機器人視覺伺服控制系統[J].農業機械學報,2009,40(1):152-156.
[22]蔣煥煜,彭永石,申川,等.基于雙目立體視覺技術的成熟番茄識別與定位[J].農業工程學報,2008,24(8):279-283.
[23]謝志勇,張鐵中,趙金英.基于 Hough 變換的成熟草莓識別技術[J].農業機械學報,2007,38(3):106-109.
Mechanical Structure Optimization and Power Fuzzy Control Design of Picking Robot end Effector
Lv Junxia1, Li Yuhua1, Wang Xiaozhi2,3, Bao Xiulan4
(1.Henan Polytechnic Institute, Nanyang 473000, China; 2.Nanchang Institute of Science & Technology, Nanchang 330108, China; 3.School of Resources Environment & Chemical Engineering, Nanchang University, Nanchang 330031, China; 4.Huazhong Agricultural University,Wuhan 430070, China)
Abstract:The end effector is fruit and vegetable picking robots is another important component, its design is generally considered to be one of the core technology of the robot. In order to improve the picking robot execution at the end of the work efficiency, increase the robot time for the effective operation of the proposed a new optimization method, which will be picking robot end effector is controlled by the servo motor, power of the robot for real-time display, to prepare for the timely charge, and manipulator in kinematics to optimize the design of the fuzzy control theory to realize the terminal output power and electric quantity of fuzzy control is performed. Greatly shorten the picking robot to perform at the end of the response time, and reduce the breakage rate of fruit, improve the operation time, provides a valuable reference for picking the modernization and automation design of robot.
Key words:picking robot; end effector; output power; fuzzy control
文章編號:1003-188X(2016)06-0036-05
中圖分類號:S24;S225.92
文獻標識碼:A
作者簡介:呂俊霞(1963-),女,河南新鄉人,副教授,碩士。通訊作者:汪小志(1981-),女,武漢人,講師,博士研究生,(E-mail)wangxiaozhi@ncu.edu.cn。
基金項目:湖北省自然科學基金項目(2014CFB322)
收稿日期:2015-05-20
