挖拔式木薯聯合收獲機的設計
2016-03-23 06:45:09廖宇蘭劉世豪鄭美云
農機化研究 2016年6期
王 濤,廖宇蘭,劉世豪,楊 怡,鄭美云
(海南大學 機電工程學院,海口 570228)
?
挖拔式木薯聯合收獲機的設計
王濤,廖宇蘭,劉世豪,楊怡,鄭美云
(海南大學 機電工程學院,海口570228)
摘要:針對我國木薯產業對木薯機械化收獲的需求,以及人工和半機械化收獲費時耗力、效率低等問題,設計了挖拔式木薯聯合收獲機。該機一次作業能完成木薯的挖掘、拔起、薯莖分離、薯塊和莖稈收集等工序。振動挖掘裝置的3階縱刃平面鏟具有良好的入土性和碎土性,防堵輥輪減少了土塊與雜草的堵塞和纏繞,偏心輪式的振動篩能有效地減少木薯的拔起力;夾持機構的3根夾持帶的錯位排列提高了夾持的可靠性;整機底盤裝載機架升降液壓系統能夠適應機架位置需求的調整。該設計為后續的木薯聯合收獲機的設計與研究提供了一定的參考。
關鍵詞:木薯;聯合收獲機;挖拔式;挖掘裝置;夾持輸送
0引言
木薯是世界三大薯類作物之一,廣泛種植于熱帶、亞熱帶地區,具有很高的營養價值,是重要的糧食、工業原材料和能源性作物[1-2]。近年來,隨著國家政策的支持與規劃及可再生能源生物燃料乙醇的巨大潛力,木薯需求量急劇增加。木薯已然成為了迫切需要發展的熱帶作物和綠色能源發展戰略新焦點[3]。木薯亟待機械化收獲,研發性能優異的木薯收獲機將推動整個木薯產業的發展。
目前,木薯收獲機按其收獲方式可分為挖式、拔式、挖拔結合式3種機型[4],采用拖拉機懸掛牽引作業,尚未有較成熟的、專門用于木薯收獲的機械。現階段,木薯收獲機械化程度過低,大多采用人工、畜力或半機械化收獲。目前,我國大力培育推廣適合機械化種植的木薯新品種,木薯種植農藝需求主要參考收獲機械的工作參數而制定,木薯收獲機械也要根據木薯生長特性來設計。為了提高木薯收獲的機械化程度和效率,研制出可靠和適用于不同品種的、專門的木薯聯合收獲機勢在必行。本文參考薯類和其他塊(根)莖類收獲機的收獲機理,與木薯特性相結合,研究設計了挖拔式木薯聯合收獲機。
1整機結構及主要技術參數
1.1整機結構工作原理
挖拔式自走木薯收獲機主要由多階帶縱刃的挖掘鏟、防堵輥輪裝置、振動碎土篩裝置、夾持輸送裝置、薯莖分離裝置、莖稈回收輸送裝置、木薯收集裝置、莖稈收集裝置、挖掘限深機構、傳動系統、液壓操作系統、機架和地輪等部分組成,如圖1所示。
該機全部動力由柴油內燃機提供,行走、防堵輥輪、振動篩、夾持輸送、薯莖分離及稈莖的收集由內燃機通過變速箱直接提供,挖掘裝置的升降、限深機構的調整、薯塊與莖稈收集箱的裝卸動力由液壓控制裝置供給。為了提高行走的通過性,由安裝于底盤的液壓拉桿操縱,通過調整底盤液壓裝置實現整個機架的位置調整。
工作前,木薯莖稈由人工在離地面50cm的距離處將其砍斷,預留高度是為了更有效地實現木薯的夾持和拔起。工作時,在行進的過程中液壓操縱裝置控制挖掘鏟裝置進入工作位置,同時限深機構觸及地面限定挖掘深度。多階縱刃挖掘鏟在挖掘中,導向撥輪將行走誤差和種植誤差范圍內的木薯撥入可夾持的范圍,木薯與土塊同時被挖起,在防堵輥輪運轉下將堵塞或壅土在挖掘鏟上的土壤進行破碎并帶入振動篩;木薯與土塊進而落入振動篩后,振動篩往復式振動將土塊進一步的疏松和破碎,細小土塊通過振動篩間隙落入田間;木薯莖稈被夾持輸送裝置夾持,在夾持輸送機構的輸送和機器的行走下,木薯被輸送至薯莖分離裝置處進行分離,木薯塊根直接落入收集裝置,稈莖由傳送帶將其輸至莖稈收集裝置,從而完成木薯收獲。

1.挖掘鏟 2.振動碎土篩裝置 3.前地輪 4.后地輪
1.2主要技術參數
配套動力(柴油機)/kW:≥58.8
外形尺寸(長×寬×高)/mm:3 000×2 100×1 900
工作行數:單行
適應收獲行距/cm:80~120;
挖掘深度/mm:0~350(可調)
作業速度/m·s-1:1.5~2.0
生產率/hm2·h-1:0.5~1.0
2主要機構及部件設計
2.1挖掘裝置
該機采用組合式振動型的挖掘裝置,由可調式限深輪、多階縱刃挖掘鏟、防堵和壅土輥輪、偏心輪機構組成的振動篩和導向裝置構成,如圖2所示。
2.1.1挖掘鏟
挖掘鏟的作用是挖松木薯塊根周圍的土壤,并將土壤抬升至一定高度,實現木薯與土壤的分離,降低夾持輸送裝置的拔起力,進而減少功率消耗。因此,挖掘鏟應有良好的入土性即入土阻力小,也應有較好的土壤破碎性能。為此,通過對土壤的破碎理論的研究,結合其他塊根類作物收獲挖掘鏟的結構,該機挖掘鏟的設計為3階并帶有縱刃的平面組合鏟。該鏟的第1階具有好的入土性,第2階增大對土壤的壓破從而提高其破碎性,第3階對壓破變形后的土壤更利于破碎分離。縱向刀刃主要是對土壤進行剪切壓破,提高土壤的破碎能力,同時加強鏟板的結構強度,提高挖掘鏟的性能,如圖3所示。

1.限深輪 2.挖掘鏟 3.導向裝置

圖3挖掘鏟結構與受力分析
α1、α2、α3為鏟面傾角;h1、h2、h3為提升高度;G為土壤與木薯塊的重力;P為挖掘鏟的牽引阻力;N為鏟對土壤和木薯的反作用力;μ為土壤對鏟的摩擦系數,μ=tanφ;φ為土壤與鋼的摩擦角,一般為30°~36°; CaA0為土壤附著力;γ為鏟刃張角;P0為鏟刃阻力;P1為鏟刃與土塊和雜草間的摩擦力;P2為垂直鏟刃的力;A0為單鏟寬度;L1、L2、L3為鏟面長度。
鏟面傾角α影響挖掘鏟的入土性和碎土性。結合挖掘鏟阻力和木薯與土塊的提升高度,對其受力分析(見圖3),建立方程為
Pcosα-(μN0+CaA0)-Gsinα≥0
N0-Gcosα-Psinα=0
在非粘性土壤中,挖掘鏟運動速度較小、鏟刃鋒利的條件下,CaA0可以忽略不計。鏟的傾角為
為了能有好的入土性和挖掘阻力,通過李彥晶等[5]分析研究表明:在工作速度不大的情況下,傾角α1=10°~20°時入土和阻力較小,設計取α1=15°。α2可提高土壤的破碎性和提升高度,據鄭厚貴等[6]研究表明:α=30°左右時率先發生剪切變形,具有較好的土壤破碎性,設計取α2=30°。α3掘起土塊沿挖掘鏟表面運動,需克服摩擦阻力,防止堵塞和壅土[7],因此取α3>45°-φ/2,φ為土壤的內摩擦角,設計取α3=20°。
鏟刃張角γ須對破開土壤和雜草有滑切作用,防止雜草纏繞,減少挖掘阻力。對鏟刃受力分析有
其中,φ為土壤對鋼的摩擦角。為了適應平作和壟作的木薯收獲,設計取γ=90°。
挖掘鏟的寬度主要依據木薯塊根的分布半徑決定,同時考慮種植和機器的行進誤差,在最小的動土條件下取得最佳的設計寬度。據廖宇蘭[8]等統計分析可知:木薯塊根直徑分布在76cm左右,該寬度下的挖掘鏟用于收獲時傷薯率和損失率低于2%。綜合機械的行走誤差和動土量,設計中組合式挖掘鏟的寬度為90cm。
挖掘鏟的總長度L由L1、L2、L3組成。鏟的每段長度L根據木薯和土塊的提升高度h及傾角α而得,即
L=L1+L2+L3
h=h1+h2+h3
其中,h為土塊和木薯的提升高度;h1、h2、h3為各階高度。各階傾角為:1階傾角α1=15°,2階傾角α2=30°,3階傾角α3=20°。
2.1.2振動篩機構
振動篩機構主要由偏心輪、連接件及柵條型振動篩組成,動力由變速箱通過皮帶傳動提供。振動篩采用偏心輪實現振動,置于挖掘鏟防堵輥輪之后,主要作用是將挖掘起的木薯和土塊通過振動讓其松散,提高土薯的分離效果,并減小后續的夾持輸送機構的拔起力。該機構采用柵條型篩子,偏心輪提供動力,固定連接桿前置與偏心距等長的活動連桿,活動連桿與偏心輪構成平行四邊形機構,通過四邊形的變形帶動振動篩抖松土塊和木薯。碎裂的土壤通過篩子間隙落入田間,木薯則被夾持機構拔起。振動篩結構如圖4所示。

1.偏心輪 2.機架 3.固定連接桿 4.連接桿 5.柵條型振動篩
振動篩的振動幅度由偏心距約束,偏心距的選取則參考土質和木薯的種植農藝;柵條型振動篩旨在抖動和漏土,其間隙適當偏大,參考距離為3~8 cm,振動篩由連接桿通過軸承連接于偏心輪構成振動運動。分析偏心輪的運動與振動篩的運動關系,設計中偏心輪采用順時針旋轉,可對土塊和木薯達到抖動并向后拋出的效果。
2.1.3輥輪與導向機構
為了防止挖掘裝置在挖掘過程中土塊壅土堵塞和雜草的纏繞,增設了輥輪防堵裝置,安裝于挖掘鏟與振動篩之間。工作時,挖掘鏟將土塊提升一定高度后帶輪帶動輥輪旋轉,將擁堵在鏟末端的土塊和雜草及木薯摔拋至振動篩,從而減少了牽引阻力和機械的堵塞。
由于木薯種植的不規范、倒伏和機械行走的誤差,挖掘過程中木薯桿不能很好地被夾持機構夾持拔起,因此挖掘裝置需安裝導向機構。導向機構由導向桿和撥輪構成,導向桿將倒伏或離計劃行走路線較遠的木薯導入撥輪,撥輪在挖掘過程中扶持木薯桿,防止其向前傾倒,同時將木薯桿撥入夾持輸送裝置,提高夾持率。
2.2夾持輸送裝置
夾持輸送裝置的目的是將挖掘提升后的薯塊夾持拔起,實現土薯分離,并輸送至一定高度。夾持輸送裝置主要由帶輪、夾持輸送帶、活動夾持輪、固定夾持輪、張緊輪及夾持架構成。工作原理:木薯與土塊在振動篩振動時,木薯莖稈被機構夾持,在兩邊的夾持帶同步運動的過程中木薯從土塊中拔起,輸送至薯莖分離裝置進行薯塊分離;分離后薯塊落入收集裝置,莖稈在輸送帶的作用下繼續運動直至莖稈收集裝置。夾持輸送裝置結構如圖5所示。

1.帶輪 2.夾持機架 3.張緊輪 4.彈簧
2.2.1夾持方式
木薯莖稈質脆硬,在夾持過程中易折斷,從而導致夾持失敗,增大了木薯收獲損失,因此設計中采用多段柔性夾持的方式以提高其夾持的可靠性。如圖6所示:在固定夾持輪的夾持機構一側安裝兩行夾持帶,活動夾持輪一側的夾持帶置于豎直方向的固定夾持輪側的夾持帶中間,從而形成三角形夾持;同時,活動輪側的夾持帶能隨著木薯莖稈的粗細自動調節以壓緊木薯,通過摩擦力將木薯莖稈夾持。

1.木薯莖稈 2.固定夾持輪 3.夾持帶 4.活動夾持輪 ;A、B、C夾持點
2.2.2夾持輸送裝置參數
防止夾持帶的脫落和提高木薯莖稈不被壓破,設計中采用多楔帶。多楔帶具有較好的柔性,能有效地通過其伸縮將木薯莖稈夾持;同時,在多個梯形楔作用下,能很好防止帶的脫落,使夾持穩定、可靠。
夾持裝置的夾持力、夾持帶的速度及機器的行進速度將直接影響著木薯拔起的可靠性。研究分析表明:木薯莖稈的拔起方向沿莖稈方向拔起損失率最少,拔起力最小[9]。因此,建立木薯被拔起速度與拔起力學模型,如圖7所示。
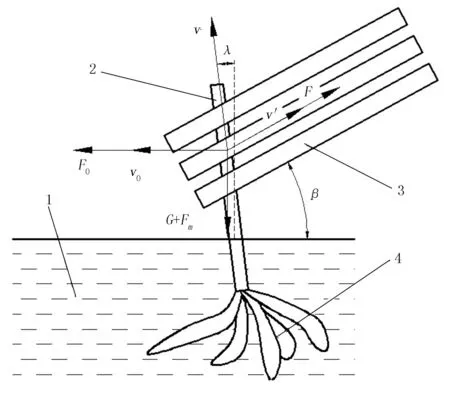
1.土壤 2.木薯莖稈 3.夾持帶 4.木薯塊根
F為夾持輸送機構對木薯莖稈莖的拔起力;F0為機器前進時對木薯桿的推力;G為木薯塊根與莖稈質量;Fm為土壤阻力;V0為機器前進速度;V為木薯的拔起速度;V′為夾持帶的運轉速度;λ為木薯前傾角度,取λ=5°~10°;β為夾持帶與地面的傾角。
圖7木薯拔起速度與拔起力學模型
由圖7的拔起力模型可得夾持輸送機構對木薯的拔起力F及夾持力F夾持的關系為
其中,F0為機器前進對木薯桿的推力;G為木薯塊根與稈莖質量;Fm為土壤阻力;β為夾持帶與地面的傾角;μ為木薯莖稈與夾持帶的摩擦因數。
通過對圖7中速度模型的分析,得夾持帶的運轉速度及木薯被拔起的速度關系為
即
由上式可得:夾持帶的運轉速度、木薯被拔起的速度均與機器的進行速度和夾持機構的傾角有關;拔起力隨拔起速度的增加而增大[10]。綜合考慮整機各個裝置的布置、動力需求及可靠的夾持率,設計木薯被拔起速度為V=2m/s,夾持機構的傾角β=35°,機械的收獲行進速度V0=1.5~2m/s。
3其他機構及部件
薯莖分離裝置采用圓盤式鋸齒刀,平行安裝于夾持輸送裝置的末端,由于木薯莖稈根部木質素較硬,因此刀具應具有較強的力學特性。薯塊收集裝置用于收集分離后的木薯塊根,由液壓系統控制,在木薯裝滿裝置后能自動傾卸。薯莖分離后的莖稈在輸送帶的作用下集中收集置于莖稈收集裝置,防止其在田間發芽生長。同時,該機底盤裝有可垂直升降的液壓系統,可以實現工作位置和行走位置的調整,滿足于不同地況的木薯收獲。
4結論與展望
1)我國木薯種植面積在逐年增加,其產業需求量供不應求,而我國的木薯機械化收獲研究起步較晚,機械化程度不高,人工收獲費時費力,制約著木薯產業的發展。目前,我國的木薯收獲機械研究仍處于研制試用階段,尚未形成成熟實用的機型。為此,本文借鑒參考其它塊根類作物較成熟的收獲機械結合木薯的生物特點設計了挖拔結合的自走式木薯聯合收獲機械。
2)該機械對木薯進行挖掘,振松塊根周圍的土壤,將木薯出土壤中拔起;再通過后續薯莖分離,對木薯塊根的收集及莖稈回收,實現了木薯從挖掘到收集的整個過程,機械化程度較高。
3)振動挖掘裝置具有好的入土性、碎土性,以及防堵塞和壅土的性能。三階帶縱刃平面組合鏟由鏟面傾角的變化適應入土傾角小、碎土傾角大的鏟面傾角變化需求;防堵塞輥輪能較好地解決土塊在鏟與機架的連接處的堵塞擁堵和與雜草纏繞;振動篩將木薯與土塊一同振動,抖松木薯塊根周圍土壤,便于拔起,減少了拔起力。
4)夾持輸送裝置采用3根多楔帶錯位分布進而對木薯莖稈進行夾持輸送。該夾持方式能有效地防止木薯莖稈的夾斷和壓碎,夾持性能可靠;多楔帶柔性較好,多楔結構能防止帶的脫落,提高了夾持輸送性能。
5)為滿足不同的木薯收獲條件,該機前置限深地輪,適應不同品種和種植農藝的收獲需求;整機底盤裝載機架升降液壓系統,適應機架位置需求的調整及不同地況的木薯收獲。
6)目前,該機尚處于理論設計階段,欠缺實地的田間試驗及進一步的參數和結構優化改進。
參考文獻:
[1]楊望,楊堅,鄭曉婷,等.木薯塊根收獲機械與技術研究現狀及發展趨勢[J].農機化研究,2012,34(6):230-235.
[2]方佳,濮文輝,張慧堅.國內外木薯產業發展近況[J].中國農學通報,2010,26(16):353-361.
[3]吳薇,柯佑鵬.中國木薯產業發展現狀及前景展望[J].中國熱帶農業,2011(3):6-9.
[4]廖宇蘭,孫佑攀,林大春,等.木薯收獲機械研究進展[J].熱帶農業工程,2009(1):55-56,60.
[5]李彥晶,魏宏安,孫廣輝,等.4U-1400FD型馬鈴薯聯合收獲機挖掘鏟的參數優化[J].甘肅農業大學學報,2011,46(5):132-136.
[6]鄭厚貴,張周強,徐武彬,等.基于土壤壓縮破壞理論的挖掘鏟的設計與分析[J].農機化研究,2011,33(11): 122-126,130.
[7]任露泉.土壤粘附力學[M].北京:機械工業出社,2011.
[8]Liao Yulan,Sun Youpan,Liu Shihao,et al. Development and prototype trial of digging-pulling style cassava harvester[J].農業工程學報,2012,28(2):29-35.
[9]余瑞明,廖宇蘭,劉世豪,等.木薯收獲機夾持輸送機構設計與力學分析[J].農機化研究,2015,37(8):74-80.
[10]楊望,蔡敢為,楊堅,等.木薯塊根拔起力的力學模型和數學模型分析[J].農業工程學報,2011,27 (11):95-100.
Design and Research of Digging Pull Cassava Combine Harvester
Wang Tao, Liao Yulan,Liu Shihao,Yang Yi, Zheng Meiyun
(College of Mechanical and Electrical Engineering, Hainan University, Haikou 570228, China)
Abstract:According to the Chinese cassava industry demanded for cassava harvest mechanization, artificial and semi mechanized harvesting were time-consuming and low efficiency,which has not been able to meet the industrial development, so the digging pull cassava harvester was designed. The cassava harvester enables a one-stop achievement of cassava digging, pulling up, clamping and conveying, separating roots from stems tuber and stem collection process. The three order flat shovel with longitudinal blade of the vibration digging device has good soil properties and soil crushing performance, and the anti-blocking roller can reduce the blocking of the soil and winding with weeds, and the vibrating screen of eccentric wheel can effectively reduce the pulling force of cassava.The clamping mechanism of the three clamping belt with dislocation arrangement can improve the reliability of clamping.The chassis is mounted lifting hydraulic system that can adapt to the needs of the adjustment of the frame’s position. This design provides a reference for the further design and research for the cassava harvester.
Key words:cassava; combine harvester; type of digging pull; digging device; clamping and conveying
文章編號:1003-188X(2016)06-0126-06
中圖分類號:S225.7+1
文獻標識碼:A
作者簡介:王濤(1989-),男,四川通江人,碩士研究生,(E-mail) wt20110320@163.com。通訊作者:廖宇蘭(1967-),女,廣東興寧人,教授,碩士生導師,(E-mail) liaoyulan@sina.com。
基金項目:國家自然科學基金項目(51365011)
收稿日期:2015-05-25
