考慮工程約束的高可信度氣動外形優化設計
2016-03-24 08:12:30雷國東鐘敏鄭遂
航空工程進展 2016年1期
雷國東,鐘敏,鄭遂
(中國航空研究院 飛行物理研究中心,北京 100012)
?
考慮工程約束的高可信度氣動外形優化設計
雷國東,鐘敏,鄭遂
(中國航空研究院 飛行物理研究中心,北京100012)
摘要:實際氣動設計中遇到的工程問題較為復雜,然而能夠用于實際工程設計的高可信度氣動外形優化設計工具較少。基于飛行器設計工程實際中的各種復雜氣動約束和幾何約束要求,集成高可信度非結構網格RANS方程求解器、彈簧比擬網格變形技術、FFD外形參數化、RBF代理模型、粒子群優化器,構建多設計點氣動外形優化設計工具,并應用于先進低速層流翼型和高亞聲速超臨界機翼的氣動外形優化設計中(包括單設計點和多設計點),進行考慮/不考慮氣動約束和幾何約束的氣動外形優化設計分析。結果表明:多設計點氣動外形優化設計工具有效,約束條件和智能優化器自動有效地引導了層流翼型和亞聲速機翼外形的有利改變。
關鍵詞:氣動約束;幾何約束;FFD外形參數化;RBF代理模型;粒子群優化器
0引言
飛行器設計過程中使用高可信度的計算流體力學(CFD)方法逐漸普遍化,設計人員不僅希望有一個高可信度的流場分析工具(例如各種CFD軟件),更希望具有自動化功能的高可信度設計工具[1]。早期的氣動優化設計大多基于低可信度的CFD模型(例如波音公司的TRANAIR軟件),無法覆蓋整個飛行包線內的流動。而實際工程的氣動優化設計通常是一個多設計點、關注細節(特別是民用飛機)并包括多種復雜的氣動和幾何限制的有約束優化過程,因此迫切需求基于N-S方程求解器的高可信度優化設計方法和工具,但是與高可信度的氣動分析工具相比,目前高可信度的氣動優化設計工具不夠成熟,在國內的工程設計中應用并不普遍。
高可信度的氣動優化技術包括高可信度的氣動分析和高可信度的代理模型,例如Huang Likeng[2]利用Co-Kriging代理模型技術構建多層次可信度的氣動優化技術。
目前高可信度氣動外形優化設計研究主要有三類策略:①耦合高可信度CFD求解器的直接優化設計;②基于伴隨方程的優化設計(Adjoint Based Optimization,簡稱ABO),該方法由Antony Jameson等提出,典型文獻見[3-4],目前在NASA FUN3D、DLR TAU軟件、商業CFD軟件Fluent、Star CCM+等上均獲得應用,國內陳頌等[5]在自主開發的氣動設計軟件也集成了該方法;③基于代理模型的優化設計(Surrogate Based Optimization,簡稱SBO),典型的技術總結見文獻[6],具體的實現技術是采用了實數編碼的遺傳算法構建的氣動外形優化技術[7-9]。
第①類策略對計算資源的要求極高,經費和時間消耗極大;第②類策略(SBO)型在三類策略中具有計算量居中,時間消耗最少,算法簡單且魯棒性高,可以采用梯度或者全局性尋優方法,易于擴展解決多設計點優化問題;第③類策略(ABO)型在三類策略中計算量最小,但是基于梯度的優化方法只能得到局部優化結果,推進式的優化并行效率不高,不能充分發揮大型計算集群的功能,算法復雜難以擴展解決多設計點優化設計問題。
由于實際氣動設計中遇到的工程問題較為復雜,而工程問題需要完整性的解決方案,能用于實際工程設計的高可信度氣動外形優化設計工具較少,目前國內設計人員改進飛行器的氣動性能主要通過經驗試湊和低可信度的方法,在研的一些高可信度氣動優化設計工具通常是基于結構網格求解器,設計人員應用不方便。
本文從實際氣動設計需求出發,闡述充分考慮多種工程實際氣動約束和幾何約束的氣動外形優化設計技術,集成非結構網格RANS方程求解器、自由變形(Free Form Deformation,簡稱FFD)外形參數化、RBF代理模型、粒子群優化算法、多設計點優化設計等技術以提升高可信度氣動優化設計技術在飛行器設計過程中的成熟度,推動其廣泛應用。
1氣動求解器
1.1控制方程
采用直角坐標系下的三維可壓縮流動N-S方程,守恒型RANS方程可寫成[10]:
(1)
(2)
(3)
(4)
(5)
μtot=μ+μtur
(6)

(7)
式中:Ω為求解域;t為時間;ρ為密度;p為靜壓;T為靜溫;vi為速度分量;H為焓;δij為克羅內克函數;S為其他源項;μ和μtur為粘性系數與湍流粘性系數;Prd和Prt為普朗特數與湍流普朗特數。
1.2湍流模型
采用Spalar-Allmaras湍流模型(簡稱SA湍流模型)[11],通過求解與湍流粘性系數有關的單一場方程得到湍流粘性系數。SA湍流模型方程如下:
(8)

湍流粘性系數
(9)

1.3數值離散方法
采用基于格點的有限體積法離散守恒型控制方程,在非結構網格特別是全四面體網格中,格點的數量約為網格的1/5~1/6,圍繞格點構建控制體(如圖1所示)能夠大幅地減少計算量,以節點為中心、連接接網格中心、網格面中心、網格棱邊中點構成的小三角面片組成的多面體作為空間離散的控制體[11]。
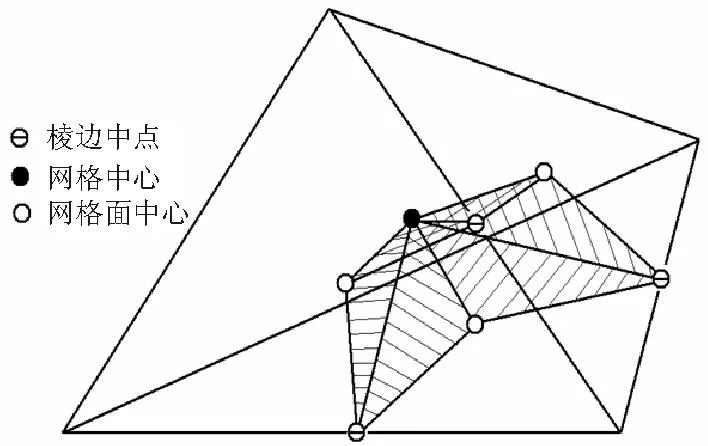
圖1 對偶剖分及控制體的構建
積分型式的控制方程為

(10)
本文求解器的無粘通量算法有中心格式(JST格式)和迎風格式(ROE格式),中心格式(JST格式)無粘通量計算方法如下:
(11)
(12)
(13)
(14)
λi=∑k∈N(i)λik
(15)
φij=4φi/(φi+φj)
(16)
φi=[λi/(4λij)]p
(17)
(18)
(19)
(20)
(21)
式中:N(i)為i點鄰節點集合;pi為i點壓力;S2和S4為延伸參數;Ni為i點鄰節點數;κ(2)和κ(4)為延伸參數。
迎風格式(ROE格式)無粘通量計算方法如下:
(22)
粘性通量計算中的梯度項處理方法如下:

(n-αfs)
(23)
αf=s·n
(24)
式中:n為相鄰控制體界面單位法向量;s為相鄰控制體中心連線單位向量。
本文求解器采用時間推進方法求解穩態流場問題,時間項處理如下:
(25)
(26)
(27)
(28)
(29)
(30)
(31)
(32)
aij=(ai+aj)/2
(33)
(34)
式中:Vij為控制體網格面中心速度分量;NCFL為CFL數;Aij為i節點和j節點構成棱邊網格面面積;μij為i節點和j節點構成棱邊中點處粘性系數;nij為i節點和j節點構成棱邊單位方向矢量;aij為i節點和j節點構成棱邊中點處聲速;ai為i節點處聲速。
1.4網格變形方法
采用網格變形的方法批量自動化地生成樣本計算網格,網格變形(包括邊界層網格)采用彈簧比擬法,該方法對于全四面體網格穩健性較好,各向異性四面體網格邊界層的生成相對三棱柱網格邊界層較為容易,四面體是空間填充性最好的基本幾何體,對于基于格點的求解器還具有計算量小的特點。基于Hook定律,對于每一個網格節點,受到的合力可寫為
Fi=∑j∈N(i)Kij(Δxj-Δxi)
(35)
剛性系數定義為
(36)
根據節點受力平衡
(37)
(38)
(39)
式中:n為迭代次數;N(i)為節點i的鄰節點集合;xi為i節點坐標。
1.5外形參數化方法
外形參數化方法是構建優化設計系統或方法的關鍵技術,工程實際的幾何外形都是三維情形,盡管二維問題可擴展為三維問題統一處理,但是使用二維參數化方法可以使問題得到極大的簡化,給出二維翼型的參數化處理方法,即Hicks-Henne參數化方法;對于三維幾何外形,例如三維機翼,則采用通用性更強的FFD參數化方法。
Hicks-Henne參數化方法是一種擾動參數化方法,采用一系列凸包函數的疊加對原始翼型物面網格進行擾動以達到改變翼型幾何外形的目的,參數化的翼型幾何外形可描述為

(40)
(41)
(42)
FFD外形參數化方法是一種通用性較好,功能強大的外形參數化方法[12],用于驅動物面網格變形,體網格變形則采用前面的彈簧比擬方法。用于處理幾何約束的幾何外形變形也采用FFD外形參數化方法。
x(u,v,w)=
(43)

對于二維翼型,初始坐標數據已知,變形方法也是確定的,因此樣本翼型的坐標數據可以推算得到,參數化方法可以用于驅動體網格變形和幾何約束的計算。由于兩種參數化方法用到的基函數均是光滑函數,在初始幾何外形具有良好光滑性的基礎上,這兩種幾何外形參數化方法給出的優化幾何外形也具有較好的光滑性;這兩種參數化函數導致的幾何外形變形是在初始幾何外形基礎上的光滑擾動,優化后的幾何外形能否出現非物理的變形則是由智能優化算法和各種氣動約束和幾何約束所決定,通過后面的算例予以證明。
2智能優化器
2.1代理模型
對于工程數值仿真優化問題(包括氣動外形優化設計),由于高可信度的數值仿真計算量較大,直接將采用高可信度的數值仿真嵌入智能優化器,代價極大而且效率極低。代理模型是解決這一問題的較好技術,可以降低計算費用,提高優化效率。代理模型中的樣本計算并行度極高,適宜應用計算機集群計算。代理模型的種類較多,包括二次多項式、Kriging函數、RBF函數(RadialBasisFunction)、人工神經網絡ANN等。本文采用的基于RBF函數的代理模型是其中一種數學模型,簡單、適應性廣,是健壯性較好的代理模型[6]。
RBF函數插值原理:

(44)
本文的RBF函數φ(ξ)采用WendlandC2函數:
(45)
ξ=‖r-ri‖/R
(46)
使用代理模型能夠大幅減少計算時間的原因是:(1)替代優化器中對高可信度求解器的反復調用,樣本目標函數和各種約束的高可信度計算是智能優化系統計算量的絕大部分,而代理模型與之相比是一個微小量,(2)多層次的并行性,各個樣本計算之間沒有信息交互,完全是獨立的,由于每一個樣本的高可信度計算本身可調用一定規模的并行計算,樣本群的計算也可在更粗一級的粒度上實現并行計算,兩個不同粒度的并行性為調用大批量計算資源減少計算時間提供了可能。
2.2粒子群算法
粒子群算法是一種群智能優化算法,粒子群優化算法是對鳥群捕食群體智能的模擬,如果多維空間有一塊食物,模擬鳥群群體智能搜索的過程,單個鳥兒不僅依靠自身的認知能力搜索食物,同時也觀察其他鳥兒搜索的情況(即社會認知),以便隨時調整自身的認知,從而更快找到食物的準確位置。與遺傳算法[13-14]相比,粒子群優化算法沒有選擇、交叉、變異模塊,適合實數建模,簡單高效。粒子群算法的數學原理是以速度和位移模型給出的,一種任意單個粒子的運動速度模型如下:
Vid=wVid+c1r1(pid-xid)+c2r2(gd-xid)
(47)
位移更新模型:
xid=xid+Vid
(48)
式中:w為粒子運動速度的慣性權;Vid為粒子i的d維速度分量;pid為粒子i的d維自身最佳位置;xid為粒子i的d維位置分量;gd為粒子群的d維全局最佳位置;c1和c2為常數;r1,r2為0~1的隨機數,模擬鳥群速度分布的多變性。
上述速度模型公式中,wVid為慣性速度項,描述每一個粒子上一秒速度對下一秒速度的影響;c1r1(pid-xid)為自身認知項,描述單個粒子對自身認為的最佳捕食位置的速度反應;c2r2(gd-xid)為社會認知項,描述單個粒子對粒子群公認的最佳捕食位置的速度反應。收斂情況下,自身認知和社會認知將趨于同一位置。
(1) 例1
為了形象闡述粒子群優化算法的全局搜索性能,采用函數y=xsinx,x∈[0,4π](如圖2所示)測試粒子群算法能否找到全局最小值,而不是局部最小值,此函數有兩個極小值。
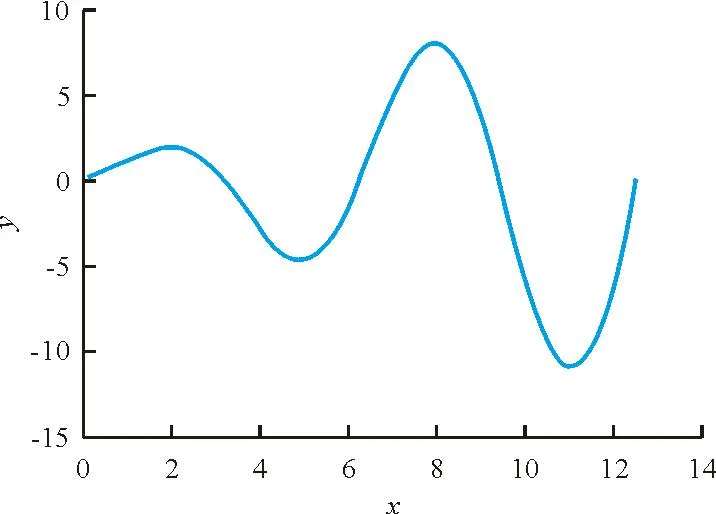
圖2 曲線y=xsinx
均勻分布初始樣本即粒子群的初始位置,如圖3所示。優化迭代收斂情況如圖4所示。
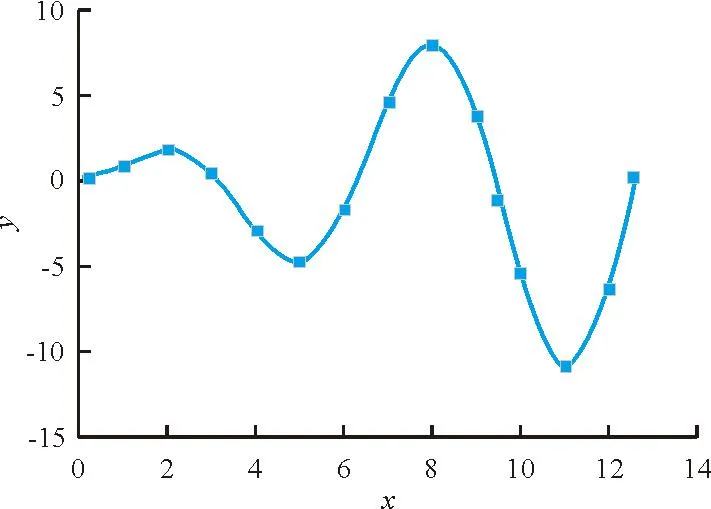
圖3 粒子群初始位置分布
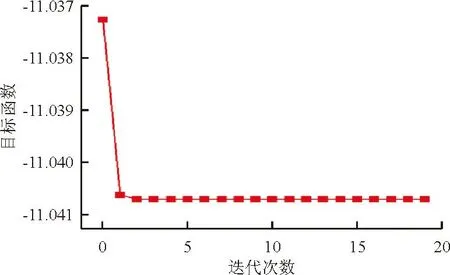
圖4 優化迭代收斂情況
從圖4可以看出:粒子群優化算法很快便收斂到全局最小值,并沒有在非全局最小值附近停留。
(2) 例2
簡單的二維問題可以顯示粒子群算法的優化性能,對于二維函數:
可以看出該函數在x=-1.5,y=3.0時,z=0最小。
二維問題優化迭代收斂示意圖如圖5所示。
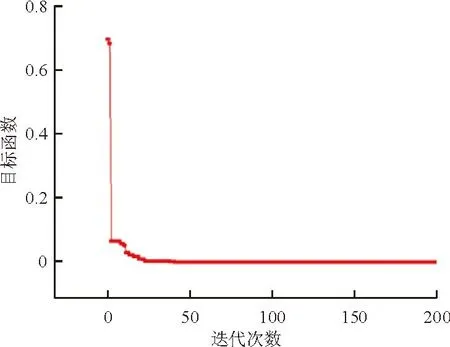
圖5 二維問題優化迭代收斂示意圖
從圖5可以看出:采用均勻分布的初始樣本即粒子群的初始位置,粒子群算法很快便找到了該測試函數的最小值。
2.3多目標方法

權系數的選取可以由經驗獲得(例如本文機翼雙設計點優化設計時采用0.5和0.5),該種處理簡單有效。線性加權處理方法的主要問題是構造帕內托前沿時,即使權系數均勻分布,前沿點也很難均勻分布,因此需要采用其他技術處理,但是工程人員只需要一組有效的多目標優化值,線性加權即可做到。
2.4氣動約束處理
在SBO型優化思路下,氣動約束的處理也可用代理模型的方法處理,將各個樣本的氣動約束分別計算出來,構建代理模型。采用罰函數法將有約束優化轉化為無約束優化。
氣動約束:CA0≤CA≤CA1
目標函數:Fobj
轉為無約束的目標函數:
max[0,-(CA1-CA)]}
(49)
式中:β為懲罰因子。
2.5幾何約束處理
實際飛行器設計工程中幾何外形不可能完全按照氣動最優的幾何設計,幾何外形必須在一定的限制下設計,這些限制即幾何約束,幾何約束非常重要,例如機翼前后梁的高度影響機翼的結構強度和內部油箱的設計。幾何約束處理類同于氣動約束處理。
幾何約束:GA0≤GA≤GA1
目標函數:Fobj
轉為無約束的目標函數:
max[0,-(GA1-GA)]}
(50)
式中:β為懲罰因子。
對于三維機翼氣動優化設計,各個控制剖面的翼型所有坐標點數據已知,FFD變形后的所有坐標點數據也可計算得到,并且計算量不大,因此各個剖面的最大相對厚度和某些弦向比例位置處的相對厚度等均可計算得到,形成樣本數據集,構建代理模型,如圖6所示,對于每個翼型剖面,約束前梁、后梁和最大厚度處的相對厚度。
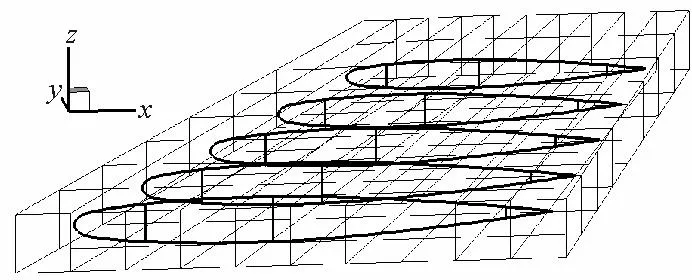
圖6 用于幾何約束處理的FFD框
2.6優化流程組織
優化流程采用C++語言和Linux-shell編程,批量計算作業任務采用OpenPBS軟件,不同部件之間的交互采用數據文件,具體流程如下:
(1) 網格生成
根據初始幾何外形,生成初始氣動計算網格,生成施加幾何約束的初始控制翼剖面,以散點數據形式給出。
(2) 文件配置
氣動計算文件配置,Hicks-Henne控制點或FFD框控制點設置,采用拉丁-超立方方法生成設計變量樣本集文件。
(3) 網格變形
根據設計變量樣本集,參數化算法驅動初始表面網格變形,輔以彈簧比擬法驅動體網格變形,自動批量生成樣本網格;參數化算法驅動初始控制翼剖面散點移動,生成樣本控制翼剖面散點集。
(4) 批量計算
調用高可信度CFD程序計算各個樣本氣動力系數和樣本控制翼剖面的幾何約束。
(5) 數據收集
收集樣本氣動力系數和幾何約束,形成氣動力系數樣本集和幾何約束樣本集。
(6) 代理模型
根據氣動力系數樣本集和幾何約束樣本集,構建氣動力系數代理模型和幾何約束代理模型。
(7) 智能優化
調用智能優化器進行單設計點或多設計點優化,得到優化設計變量。
(8) 幾何重構
根據優化設計變量,采用網格變形程序得到優化網格并計算氣動力系數,采用參數化方法得到優化后的控制翼剖面散點數據并計算幾何約束。得到的優化氣動力數據和幾何約束用于檢驗優化流程的有效性,如果優化有效,根據優化后的表面網格重構優化后的幾何外形。
3驗證算例
3.1低速層流翼型優化設計
以GAW-1翼型為原始翼型,以Hicks-Henne參數化方法構建批量樣本幾何外形,考慮三個設計點(巡航、爬升和最小平飛狀態),并考慮翼型表面為部分層流狀態。
巡航狀態(如表1所示):高度為3 000m,Ma=0.313,升力系數定為0.4。
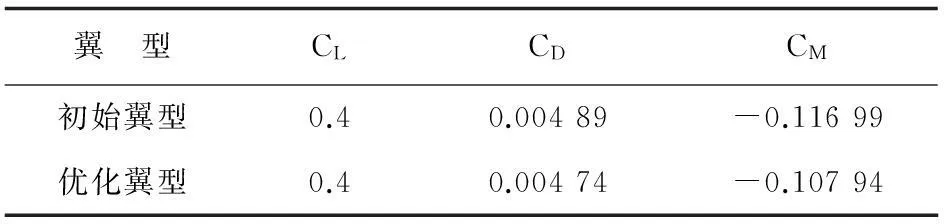
表1 巡航狀態
爬升狀態(如表2所示):高度為海平面狀態,Ma=0.189,升力系數定為0.88。
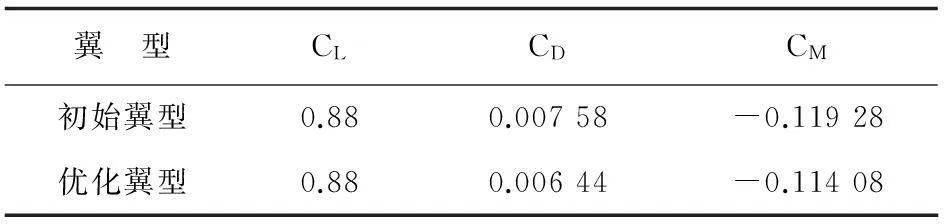
表2 爬升狀態
最小平飛狀態(如表3所示):Ma=0.091,高度定為海平面狀態。
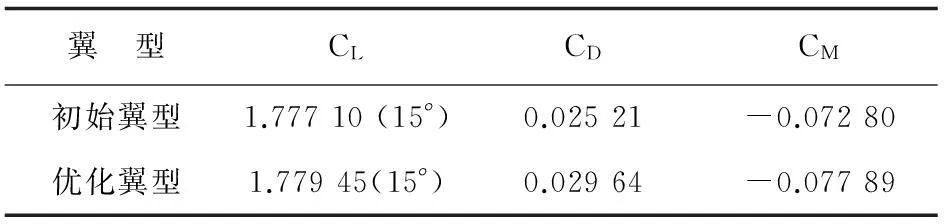
表3 最小平飛狀態
從表1~表3可以看出:三個設計點在滿足所設定的氣動約束和幾何約束的前提下,前兩個設計點阻力系數小于GAW-1翼型,而第三個設計點設計攻角的升力系數大于GAW-1翼型。
前兩個設計點的氣動約束除了升力系數約束,還包括低頭力矩系數不高于初始翼型,這兩個設計點的設計目標為阻力系數;第三個設計點的目標為升力系數,要求α=15°時升力系數高于初始翼型,但是對阻力系數和俯仰力矩系數沒有約束;三個設計點的幾何約束為翼型最大相對厚度17%不變。以GAW-1翼型為原始翼型,優化前后的翼型形狀如圖7所示。

圖7 優化前后對比(GAW-1翼型)
3.2高亞聲速超臨界機翼優化設計
以高亞聲速超臨界機翼CAE-AVM為初始機翼[15](如圖8所示),雖然此機翼巡航設計點Ma=0.85,但本文研究其在Ma為0.77和0.79時的氣動性能。以FFD參數化方法構建批量化樣本幾何外形(如圖9所示),考慮兩個設計點,第一個設計點Ma=0.77,α=1°,海拔高度為13 000m;第二個設計點Ma=0.79,α=1.92°,海拔高度為13 000m。兩個設計點的優化目標函數均為阻力系數,氣動約束為保證升力系數和俯仰力矩系數不變,幾何約束為保持前梁、后梁和最大相對厚度處的相對厚度不變,前梁位置為20%當地弦長,后梁位置為70%當地弦長,最大相對厚度位置可以浮動。幾何約束是施加在展向y=(1.275 23m,7.281 55m)區間均勻分布的7個翼剖面上。采用SA湍流模型計算粘性效應,采用各向異性四面體劃分邊界層。FFD框采用的xyz方向框條數目為(11,9,2),設計變量為FFD框節點z坐標移動量,移動范圍定為(-0.03m,0.03m),采用拉丁超立方方法構造500個樣本。
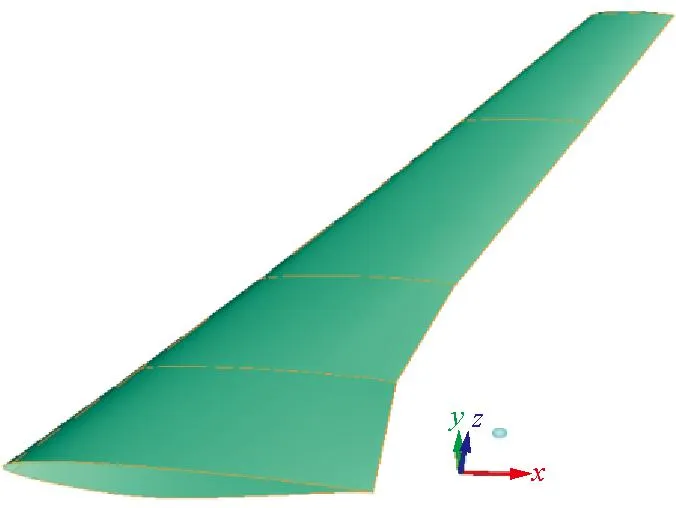
(a) 高亞聲速超臨界機翼外形
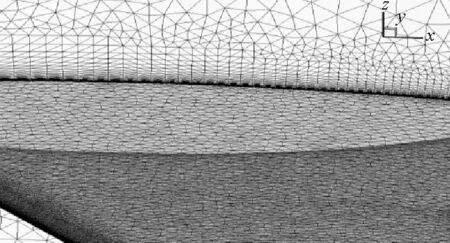
(b) 翼根部位各向異性四面體邊界層表面網格
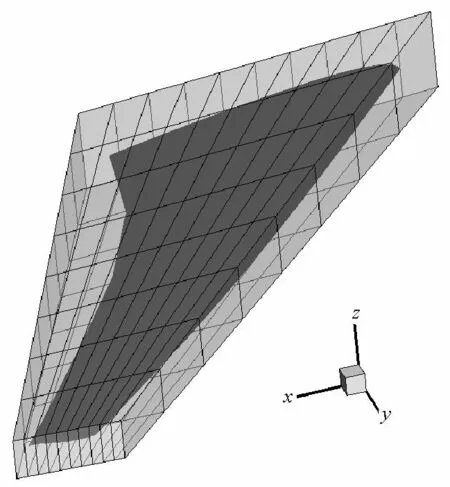
圖9 高亞聲速超臨界機翼的FFD框
3.2.1單設計點優化
分別單獨考慮第一和第二設計點,且僅考慮氣動約束,氣動約束是保持兩個設計點各自的升力系數和俯仰力矩系數不變,從CFD程序驗算后的優化結果如表4~表5所示。
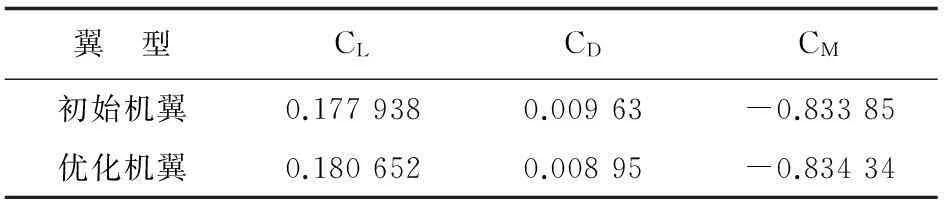
表4 單獨考慮第一設計點優化前后氣動力/力矩系數
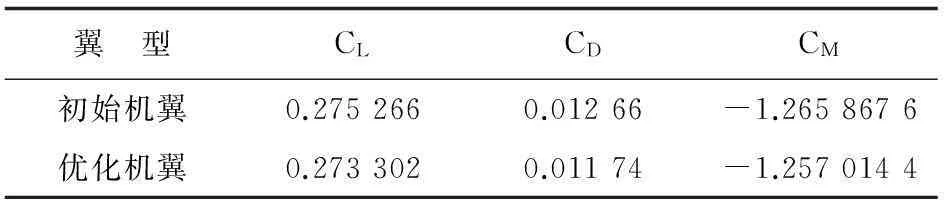
表5 單獨考慮第二設計點優化前后氣動力/力矩系數
從表4~表5可以看出:第一設計點阻力系數減小了6.8個單位,升力系數和俯仰力矩系數近似滿足約束;第二設計點阻力系數減小了9.2個單位,升力系數和俯仰力矩系數近似滿足約束,優化程序和代理模型較好地起到了引導氣動外形優化的作用。
3.2.2雙設計點優化
(1) 不考慮幾何約束
采用上下兩個設計點的樣本數據,但是要求一套設計變量對兩個設計點同時優化,目標函數仍是阻力系數,氣動約束是保持兩個設計點各自的升力系數和俯仰力矩系數不變,且不考慮幾何約束,優化前后氣動力系數如表6~表7所示。
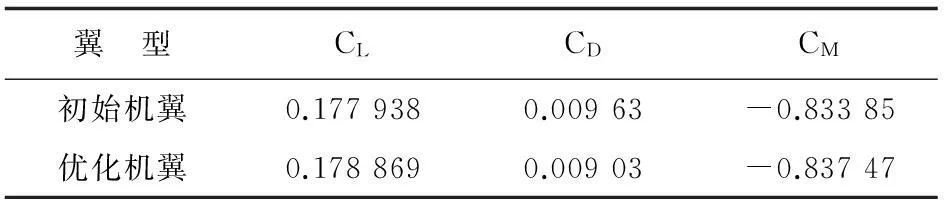
表6 第一設計點氣動力系數(共兩個設計點)
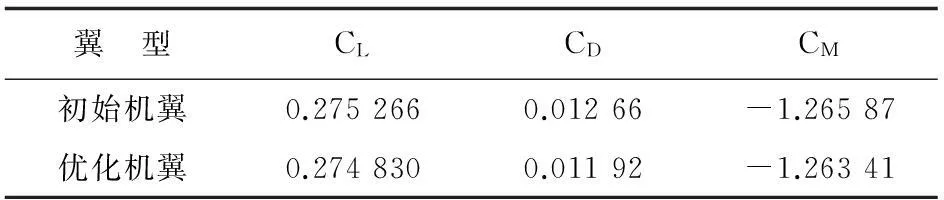
表7 第二設計點氣動力系數(共兩個設計點)
從表6~表7可以看出:兩個設計點的阻力系數分別降低了6.0個阻力單位和7.4個阻力單位,而升力系數和俯仰力矩系數基本保持不變。
60%展向位置的翼剖面變化如圖10所示。

圖10 優化前后機翼展向60%站位處翼型變化示意
(2) 考慮幾何約束
同時考慮氣動約束和幾何約束的雙設計點優化,氣動約束是保持兩個設計點各自的升力系數和俯仰力矩系數不變;幾何約束是考慮前梁、后梁和最大相對厚度處相對厚度不變,共21個幾何約束,樣本幾何約束通過FFD變形初始翼剖面坐標獲得。采用前面兩個設計點的氣動力系數樣本數據,兩個設計點的優化結果如表8~表9所示。
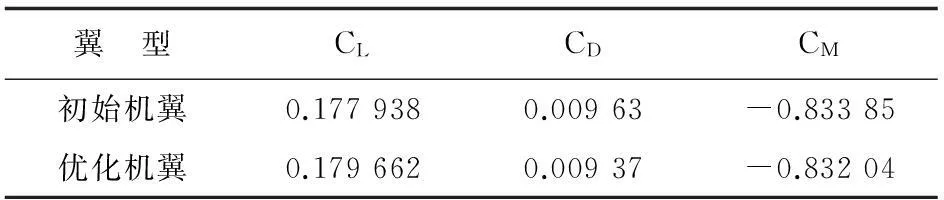
表8 第一設計點氣動力系數(共兩個設計點 幾何約束)

表9 第二設計點氣動力系數(共兩個設計點 幾何約束)
從表8~表9可以看出:兩個設計點的阻力系數分別降低了2.6個阻力單位和3.3個阻力單位,而升力系數和俯仰力矩系數基本保持不變。
60%展向位置的翼剖面變化如圖11所示。
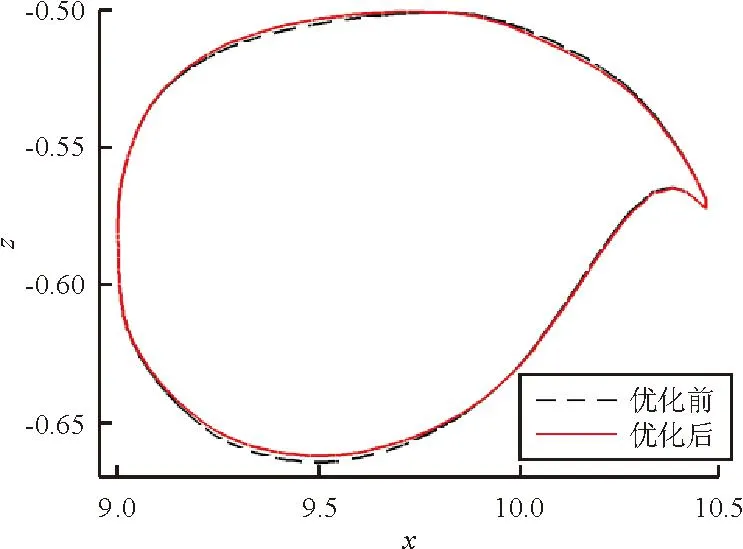
圖11 優化前后機翼展向60%站位處翼型變化
(3) 不考慮/考慮幾何約束對比
如果不施加幾何約束,前梁和最大厚度位置處相對厚度減小,從而不利于機翼結構和油箱的設計。由于約束了前后梁處和最大相對厚度處的相對厚度,機翼前后梁和最大厚度處將只能同時上移、同時下移或者不變,從而維持三個位置的相對厚度不變,從給出的翼剖面形狀可以看出,智能優化器自動化地引導了幾何外形改變。幾何約束施加處的相對厚度增量(優化后-優化前)分布曲線如圖12所示。
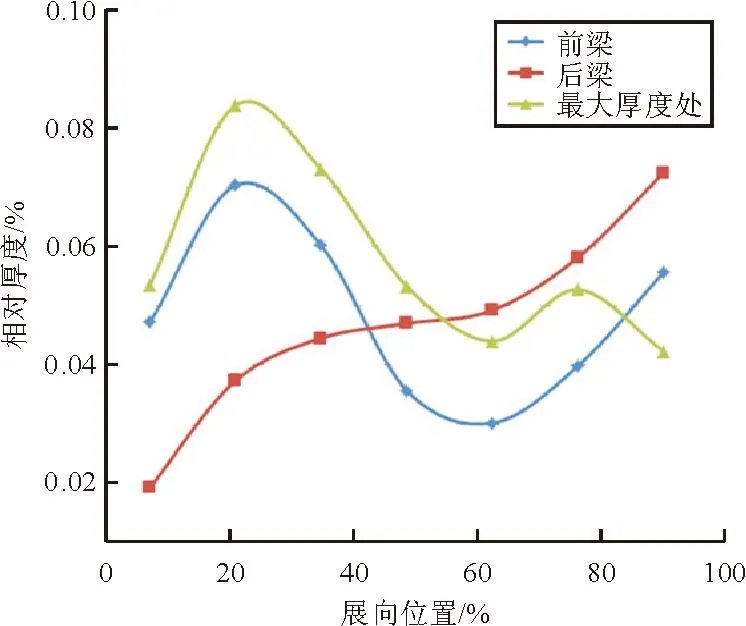
圖12 幾何約束處優化前后相對厚度變化量
從圖12可以看出:僅有最大不超過0.1%的的相對厚度增加(相對厚度增加有利于前后梁和油箱的設計),優化器在使氣動約束和幾何約束滿足的同時有效地減小了兩個設計點的阻力系數。
4結束語
(1) 本文通過集成計算流體力學、參數化幾何、多目標優化三個方面的技術構建了一套適合實際工程設計要求的飛行器氣動外形優化設計工具,并應用該工具進行了低速層流翼型和高亞聲速超臨界機翼多設計點外形優化設計。
(2) 無論是低速翼型還是高亞聲速機翼,在滿足各種氣動約束和幾何約束的前提下,優化后的幾何外形均具有與初始幾何外形相當的光滑性,并且各個設計點氣動性能的改善較為顯著,從而驗證了本文優化設計工具和方法的有效性。
(3) 本文后續將開展翼身組合體及全機構型的氣動外形優化設計、多種代理模型技術、多重FFD框及網格大變形技術研究,以增強本文設計工具的工程實用性。
參考文獻
[1]SergeyPeigin, 朱自強,BorisEpstein. 可用于民機空氣動力設計中的數值優化方法[J]. 航空學報, 2014, 35(1): 58-68.
SergeyPeigin,ZhuZiqiang,BorisEpstein.Applicablenumericaloptimizationmethodsforaerodynamicdesignofcivilaircraft[J].ActaAeronauticaetAstronauticaSinica, 2014, 35(1): 58-68.(inChinese)
[2]HuangLikeng,GaoZhenghong,ZhangDehu.Researchonmulti-fidelityaerodynamicoptimizationmethods[J].ChineseJouralofAstronautics, 2013, 26(2): 279-286.
[3]AntonyJameson,ThomasVJones.Airplanedesignwithaerodynamicshapeoptimization[EB/OL].(2011-02-01)[2016-01-21].http:∥aero-comlab.stanford.edu/papers/stanford_optimization_20110201.pdf
[4]ReutherJ,JamesonA.Aerodynamicshapeoptimizationofwingandwing-bodyconfigurationsusingcontroltheory[R].AIAA-95-0123, 1995.
[5] 陳頌, 白俊強, 史亞云, 等. 民用客機機翼/機身/平尾構型氣動外形優化設計方法研究[J]. 航空學報, 2015, 36(10): 3195-3207.
ChenSong,BaiJunqiang,ShiYayun,etal.Aerodynamicoptimizationdesignofciviljetwing-body-tailconfiguration[J].ActaAeronauticaetAstronauticaSinica, 2015, 36(10): 3195-3207.(inChinese)
[6]SlawomirKoziel,DavidEcheverríaCiaurri,LeifurLeifsson.Computeroptimization,methodsandalgorithm[M].Germany:Springer, 2011: 33-59.
[7]NorbertKroll.Numericalmethodsformultidisciplinaryanalysisandoptimization[C]∥NorbertKroll.CAE-DLRAerodynamicSeminar2011.Beijing:CAE-DLR, 2011: 78-96.
[8]NorbertKroll,BrezillonJ,Abu-ZuraykM,etal.Progressinnumericalshapeoptimization[C]∥NorbertKroll.DLR-CAEAerodynamicsSeminar2013,Beijing,P.R.China:CAE-DLR, 2013: 1-74.
[9]TerryLHolst,ThomasHPulliam.Aerodynamicshapeoptimizationusingareal-number-encodeedgeneticalgorithm[EB/OL].(2001-07-11)[2016-01-21].http:∥people.nas.nasa.gov/~pulliam/mypapers/AIAA-2001-2473.pdf
[10] 任玉新, 陳海昕. 計算流體力學基礎[M]. 北京: 清華大學出版社, 2006: 7-13.
RenYuxin,ChenHaixin.Thebasiccomputationalfluiddynamics[M].Beijing:TsinghuaUniversityPress, 2006: 7-13.(inChinese)
[11]BlazekJ.Computationalfluiddynamics:principlesandapplications[M]. 2nded.Germany:Elsevier, 2005: 240-247.
[12]JamshidA.Samareh.Asurveyofshapeparameterizationtechniques[C]∥NasaLangleyCenter.Ceas/AIAA/Icase/NasaLangleyInternationalForumonAeroelasticityandStructuraldynamics.USA:NASA, 1999: 333-343.
[13]MarianNemec,DavidWZingg.Multi-pointandmulti-objectiveaerodynamicshapeoptimization[EB/OL].(2002-09-04)[2016-01-21].http:∥people.nas.nasa.gov/~pulliam/mypapers/aiaa-2002-5548.pdf.
[14] 潘峰, 李位星, 高琪. 粒子群優化算法與多目標優化[M]. 北京: 北京理工大學出版社, 2013: 137-146.
PanFeng,LiWeixing,GaoQi.Particleswarmoptimizerandmulti-objectoptimization[M].Beijing:BeijingInstituteofTechnologyPress, 2013: 137-146.(inChinese)
[15]JunHua,SuiZheng,MinZhong,etal.Designandverificationstudyofanaerodynamicvalidationmodel[R].APISAT-2015,Australia:RAeSAustralianDivision, 2015.
雷國東(1980-),男,博士,高級工程師。主要研究方向:計算流體力學、飛行器氣動設計。
鐘敏(1987-),女,碩士,工程師。主要研究方向:計算流體力學、飛行器氣動設計。
鄭遂(1959-),男,博士,研究員。主要研究方向:飛機總體與氣動設計。
(編輯:趙毓梅)
High-fidelity Aerodynamic Shape Optimization and Design with Engineering Constraints
Lei Guodong, Zhong Min, Zheng Sui
(Flight Physics Research Center, Chinese Aeronautical Establishment, Beijing 100012, China)
Abstract:Engineering problems is complex in actual aerodynamic design, but high-fidelity aerodynamic shape optimization and design tool is scarcity. Aimed at the complicated aerodynamic constraints and geometry constraints of the aircraft design engineering, the high-fidelity unstructured-grid RANS equation solver, the spring dynamic mesh method, the FFD geometry parameterization method, the RBF function surrogate model and the PSO optimizer are integratedto build an aerodynamic shape multi-point optimization and design tool. It is employed for the advanced low-speed laminar-flow airfoil shape design and the high subsonic supercritical wing shape design via the single-point and multi-point cases, with/without the aerodynamic and the geometry constraints. The results show that the tool works, and the constraints and the intelligence optimizer automatically and effectively guide the airfoil and wing shape to change with improved aerodynamic performances.
Key words:aerodynamic constraints; geometry constraints; FFD geometry parameterization; RBF function surrogate model; PSO optimizer
作者簡介:
中圖分類號:V211
文獻標識碼:A
DOI:10.16615/j.cnki.1674-8190.2016.01.018
文章編號:1674-8190(2016)01-124-11
通信作者:雷國東,leigd@cae.ac.cn
收稿日期:2015-12-14;修回日期:2016-01-21
