基于模糊自適應PID控制的礦用潛水泵電機軟啟動器
2016-03-30 21:06:14魏磊
科技視界 2016年1期
魏磊
【摘 要】針對礦用高壓潛水泵電機在啟動過程中存在的過電流問題,本文提出采用模糊自適應PID控制可變電抗器的高壓電機軟啟動控制策略。本系統的核心采用高性能電機控制芯片TMS320F2812,配合電壓檢測、電流檢測等外圍電路,實現了高壓電機的電流閉環控制。仿真結果證明,與傳統電抗器限流軟啟動相比,該軟啟動器能使電機在啟動初始階段更加有效地降低啟動電流的沖擊,使電機平穩啟動。
【關鍵詞】高壓電機,潛水泵;模糊自適應;可變電抗器;軟啟動
【Abstract】For the problem of shock and over current and voltage sage of mine high-voltage submersible motor in the process of start.Studying a soft start based on fuzzy adaptive PID control mode of high voltage asynchronous motor with variable reactor.The core of this system adopts high performance motor control chip TMS320F2812, cooperate to detect voltage, current and other peripheral circuit, realizes the high voltage motor current closed loop current limit control, and the hardware structure is given.The simulation results show that compared with the traditional reactor current limiting soft start, the motor in the initial stage can be more effective in reducing the impact of the starting current and also make motor start smoothly.
【Key words】High-voltage motor; Submersible pump; Fuzzy self-adaptive PID; Variable reactor; Soft start
0 引言
隨著煤礦開采由淺部向深部發展,近年來煤礦透水事故頻繁發生,因此其對井下排水泵的自動化控制水平的要求不斷提升。在煤礦井下如果直接啟動水泵,其高壓大功率電機在啟動過程中產生的電流沖擊容易引起配電網局部母線電壓的瞬間凹陷,繼而觸動配電網絡繼電保護,使之誤動作,同時沖擊電流產生的熱效應使電機的定子繞組溫升過大,使電機繞組極易短路,使電機的使用壽命縮短。
煤礦常用的可變電抗式軟啟動器多采用常規限流軟啟動,但是這種啟動方式仍然不能很好的抑制啟動電流。因此,本文在原有可變電抗式限流啟動的基礎上引入模糊自適應PID控制策略,采用DSP作為微處理器,配合電壓、電流檢測電路,實現電流的閉環控制。仿真結果證明,新型軟啟動器可以使電機的啟動過程優化,減小啟動電流的沖擊。
1 模糊自適應PID控制軟啟動系統總體結構
1.1 控制系統的總體結構
本系統由可變電抗器、晶閘管功率變換單元(SCR)、三相交流電源、電壓及電流檢測電路、驅動單元和模糊自適應PID控制系統、鍵盤和顯示器等單元組成。
其中,采用具有高速和高精度處理能力的DSP處理器TMS320F2812作為本系統的核心芯片。
1.2 控制系統的工作原理
可變電抗器的高壓繞組與電機的定子繞組串接,低壓繞組與晶閘管功率變換單元連接,組成阻抗控制回路。DSP微處理器實時在線采集電機啟動電流并與給定限流值進行比較,計算出晶閘管觸發角的相移量,經驅動單元,控制功率變換單元中晶閘管的通斷,控制可變電抗器的低壓繞組的阻抗值,并通過阻抗變換,改變電抗器與電機串接的高壓側阻抗值,以改變整個高壓回路阻抗值,進而控制電機啟動電流。
2 模糊自適應PID控制器設計
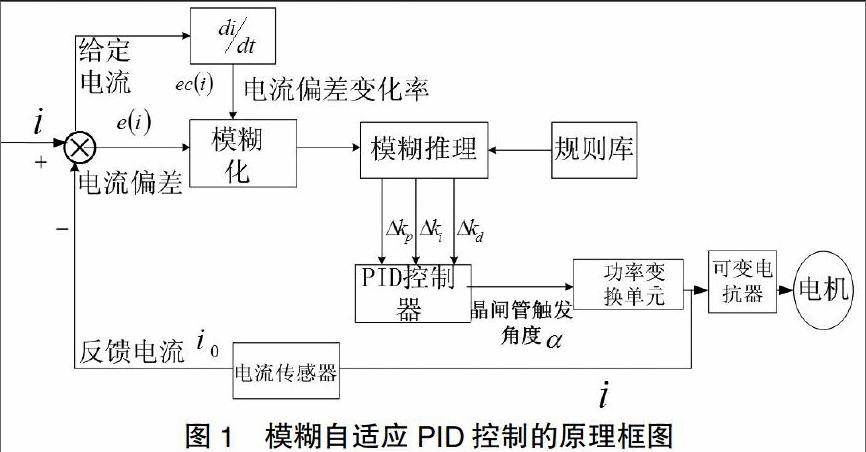
本文引入模糊自適應PID控制,運用模糊控制的基本理論和方法,對常規PID的參數進行在線自整定,控制晶閘管觸發角相移量的輸出,能夠提高可變電抗器阻抗變換的精度,實現更加精準的控制。其控制原理圖如圖1所示。
2.1 輸入和輸出選取
以實際采集到的電機定子繞組電流與限定的啟動電流的偏差e(i)和其偏差變化率ec(i)為模糊控制器的輸入,經模糊化后,依據規則庫設定的控制規則,經由模糊推理在線整定PID的3個參數。
2.2 模糊子集和論域的設定
3 系統仿真與結果分析
為了驗證本文所提出的基于模糊自適應PID控制策略的軟啟動性能,以220kW、6kV三相鼠籠式電機為研究對象,在MATLAB中分別建立常規軟啟動方式下和模糊自適應PID軟啟動方式下的仿真模型,并采用電流閉環的限流控制。
仿真中的實驗電機選取三相鼠籠式高壓異步電機,其主要參數為:額定功率220kW,額定電壓6kV,頻率為50Hz,額定電流為32A,定子繞組電阻為1.83Ω,定子漏感為0.0358H,每相折合電阻為3.71Ω,折合漏感為0.0358H,勵磁電感為0.9872H極對數為2。
3.1 常規限流軟啟動
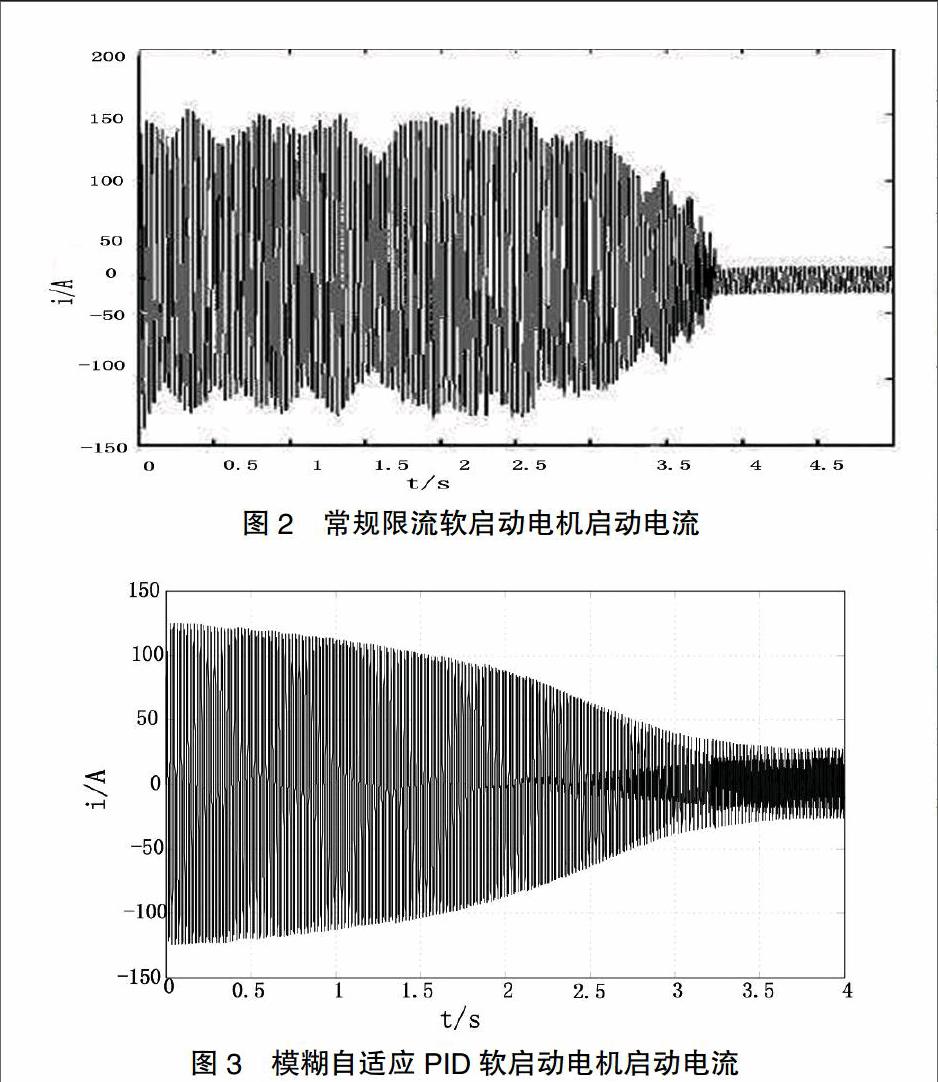
圖2為常規限流軟啟動方式下5秒內的啟動電流仿真波形。分析波形可知,啟動階段,電流最大值為150A,在1.6秒電流達到設定值120A,在3.7秒左右完成啟動。整個啟動過程,電機電流隨電機轉速上升逐漸減小,在電機轉速將要達到額定轉速時,電流迅速下降到實際運行電流;同時在啟動過程中電流波動較大,啟動不平穩。
3.2 模糊自適應PID軟啟動
圖3為模糊自適應PID軟啟動在4秒內的啟動電流。啟動初始階段,最大電流為122A,在0.3后電機的啟動電流達到初始設定值120A,啟動電流隨著時間平滑的減小,電機平穩的加速,在3.8秒左右電機定子電流迅速降低到額定電流值,電機達到額定轉速。
由圖2和圖3比較可得,引入模糊自適應PID控制策略的軟啟動相比于傳統的軟啟動,在3.7~3.8秒的啟動過程中,能更好的限制電機的啟動電流,抑制電機啟動過程中電流的頻繁波動,使電機的啟動電流曲線更加的平滑。
4 結語
本文針對傳統礦用高壓潛水電機在啟動過程中存在的過電流問題,提出了采用模糊自適應PID控制可變電抗器的高壓電機軟啟動控制策略,分析了模糊自適應PID軟啟動系統組成以及其具體工作原理,給出了模糊自適應PID控制器設計步驟并在MATLAB中建立了具體的軟啟動仿真模型。
通過對高壓異步電動機在傳統限流軟啟動和模糊自適應PID限流軟啟動的仿真結果分析對比可知,引入模糊自適應PID控制策略的軟啟動相比于傳統的軟啟動,能更好的限制電機的啟動電流,減小對供電網絡的沖擊,同時優化電機的啟動電流曲線。
【參考文獻】
[1]袁佑新,王亞蘭,彭萬權,嚴進林,等.基于可變電抗的高壓軟啟動器研究[J].電力自動化設備,2007,27(11):38-41.
[2]楊致泰,石翔,等.可變電抗式軟啟動器研究[J].山東理工大學學報(自然科學版),2012,26(5):84-87.
[3]張涇周,楊偉靜,張安祥.模糊自適應PID制的研究及應用仿真[J].計算機仿真,2009,26(9):132-135.
[4]祝龍記,石曉艷.電氣工程與自動化控制系統的MATLAB仿真[M].中國礦業大學出版社,2014,1.
[5]常雨芳,袁佑新,黃文聰,等.電力電子電抗器阻抗變化研究[J].武漢理工大學學 報,2011,10(33):127-130.
[責任編輯:楊玉潔]
