礦用自卸車斷開(kāi)式轉(zhuǎn)向梯形設(shè)計(jì)與運(yùn)動(dòng)仿真分析
2016-04-07 02:13:39周新濤馬娜盛嘉璐陳經(jīng)濤于少杰
現(xiàn)代制造技術(shù)與裝備 2016年11期
關(guān)鍵詞:優(yōu)化
周新濤馬 娜盛嘉璐陳經(jīng)濤于少杰
(1.西安汽車科技職業(yè)學(xué)院,西安 710038;2.陜西同力重工股份有限公司,咸陽(yáng) 712000)
礦用自卸車斷開(kāi)式轉(zhuǎn)向梯形設(shè)計(jì)與運(yùn)動(dòng)仿真分析
周新濤1馬 娜2盛嘉璐1陳經(jīng)濤1于少杰2
(1.西安汽車科技職業(yè)學(xué)院,西安 710038;2.陜西同力重工股份有限公司,咸陽(yáng) 712000)
依據(jù)轉(zhuǎn)向桿系運(yùn)動(dòng)學(xué)原理,分析轉(zhuǎn)向內(nèi)、外輪轉(zhuǎn)角與梯形參數(shù)的關(guān)系。以實(shí)際外輪轉(zhuǎn)角與阿克曼轉(zhuǎn)角偏差最小為設(shè)計(jì)目標(biāo),通過(guò)使用數(shù)值仿真軟件的工具箱函數(shù),對(duì)轉(zhuǎn)向梯形主要參數(shù)進(jìn)行優(yōu)化。將優(yōu)化所得梯形參數(shù)進(jìn)行運(yùn)動(dòng)學(xué)仿真分析,得出實(shí)際內(nèi)、外輪轉(zhuǎn)角與仿真分析轉(zhuǎn)角基本保持一致,從而驗(yàn)證了本優(yōu)化設(shè)計(jì)方法的可行性。
斷開(kāi)式 轉(zhuǎn)向梯形 優(yōu)化設(shè)計(jì) 仿真
引言
車輛轉(zhuǎn)向性能關(guān)乎整車的機(jī)動(dòng)靈活性、操縱穩(wěn)定性和輪胎的使用壽命,在多軸汽車上尤為突出。而對(duì)于轉(zhuǎn)向系統(tǒng)的設(shè)計(jì),需要優(yōu)化轉(zhuǎn)向桿系結(jié)構(gòu)來(lái)實(shí)現(xiàn)最佳的轉(zhuǎn)向過(guò)程,即轉(zhuǎn)向時(shí)所有車輪都處于純滾動(dòng)狀態(tài)或只有極小的滑移[1-3],以達(dá)到減小輪胎磨損和轉(zhuǎn)向阻力矩的目的。目前,在轉(zhuǎn)向桿系的設(shè)計(jì)領(lǐng)域內(nèi),因斷開(kāi)式梯形需要設(shè)計(jì)的參數(shù)較多,采用傳統(tǒng)作圖法來(lái)優(yōu)化梯形參數(shù)已經(jīng)很難達(dá)到設(shè)計(jì)目標(biāo)[4]。本文提出了基于數(shù)值仿真優(yōu)化工具箱函數(shù)進(jìn)行梯形參數(shù)的多變量多約束的非線性優(yōu)化計(jì)算,并將優(yōu)化所得參數(shù)進(jìn)行運(yùn)動(dòng)仿真,以驗(yàn)證轉(zhuǎn)向梯形數(shù)學(xué)模型的準(zhǔn)確性和優(yōu)化算法的可靠性。
1 斷開(kāi)式轉(zhuǎn)向梯形設(shè)計(jì)
1.1 阿克曼轉(zhuǎn)角
一般情況下,兩軸汽車的轉(zhuǎn)向通過(guò)偏轉(zhuǎn)前輪來(lái)實(shí)現(xiàn)。為了減小汽車在轉(zhuǎn)向時(shí)輪胎的磨損,前輪在路面上應(yīng)做無(wú)滑移的純滾動(dòng),而轉(zhuǎn)動(dòng)瞬心應(yīng)在后軸延長(zhǎng)線上。此時(shí),前輪內(nèi)側(cè)車輪偏轉(zhuǎn)角(記為阿克曼內(nèi)輪轉(zhuǎn)角)α與前輪外側(cè)車輪偏轉(zhuǎn)角(記為阿克曼外輪轉(zhuǎn)角)β應(yīng)滿足阿克曼轉(zhuǎn)角,如公式(1)[5]。
cotβ=cotα+K/L (1)
式中:β為阿克曼外輪轉(zhuǎn)角,α為阿克曼內(nèi)輪轉(zhuǎn)角,K為兩主銷中心線延長(zhǎng)線到地面交點(diǎn)之間的距離,L為軸距。阿克曼轉(zhuǎn)角關(guān)系圖,如圖1所示。
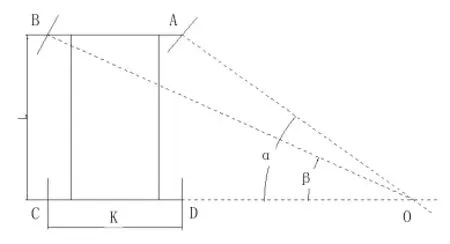
圖1 阿克曼轉(zhuǎn)角關(guān)系圖
汽車在轉(zhuǎn)彎行駛時(shí),理想的阿克曼轉(zhuǎn)角關(guān)系幾乎是不存在的,而轉(zhuǎn)動(dòng)瞬心也很難保證在后軸線的延長(zhǎng)線上,實(shí)際內(nèi)、外輪轉(zhuǎn)角總與阿克曼轉(zhuǎn)角有一定偏差[2]。因此,在設(shè)計(jì)轉(zhuǎn)向梯形機(jī)構(gòu)時(shí),需要對(duì)梯形參數(shù)進(jìn)行優(yōu)化計(jì)算,使得轉(zhuǎn)向過(guò)程中實(shí)際內(nèi)、外輪轉(zhuǎn)角與阿克曼轉(zhuǎn)角偏差最小,以滿足輪胎使用要求。
1.2 斷開(kāi)式梯形機(jī)構(gòu)
斷開(kāi)式轉(zhuǎn)向梯形機(jī)構(gòu),如圖2所示。O1、O2分別為兩主銷旋轉(zhuǎn)中心,梯形O1OBA、O2DCO分別組成了兩組轉(zhuǎn)向四桿機(jī)構(gòu)。在右邊的四桿機(jī)構(gòu)中,O1O為固定桿,O1A為曲柄,OB為搖臂,AB為連桿;左邊四桿機(jī)構(gòu)與右邊對(duì)稱。OBC三點(diǎn)在同一個(gè)構(gòu)件中,該構(gòu)件連接兩組四桿機(jī)構(gòu),使得車輛轉(zhuǎn)向時(shí),左右桿系具有特定的運(yùn)動(dòng)規(guī)律。由圖2可以看出,決定四桿機(jī)構(gòu)的參數(shù)主要有:梯形臂長(zhǎng)m;梯形底角a;搖臂旋轉(zhuǎn)半徑r;搖臂與梯形固定邊夾角b。
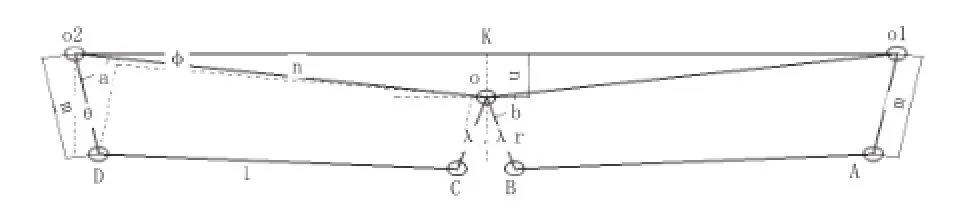
圖2 斷開(kāi)式轉(zhuǎn)向梯形
當(dāng)車輛向左轉(zhuǎn)某一角度時(shí),轉(zhuǎn)向桿系間的運(yùn)動(dòng)關(guān)系如圖3所示。假定O2D逆時(shí)針旋轉(zhuǎn)x角度(記為實(shí)際內(nèi)輪轉(zhuǎn)角),則OC、OB隨之逆時(shí)針旋轉(zhuǎn)t角度,同時(shí)O1A逆時(shí)針旋轉(zhuǎn)y角度(記為實(shí)際外輪轉(zhuǎn)角);車輛向右轉(zhuǎn)時(shí),桿系間的運(yùn)動(dòng)關(guān)系與左轉(zhuǎn)時(shí)剛好相反。
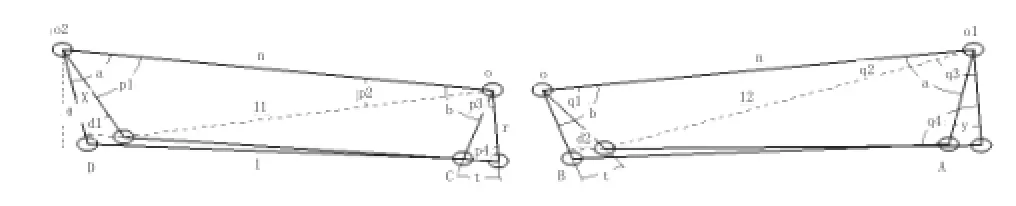
圖3 斷開(kāi)式梯形某一轉(zhuǎn)角時(shí)的位置
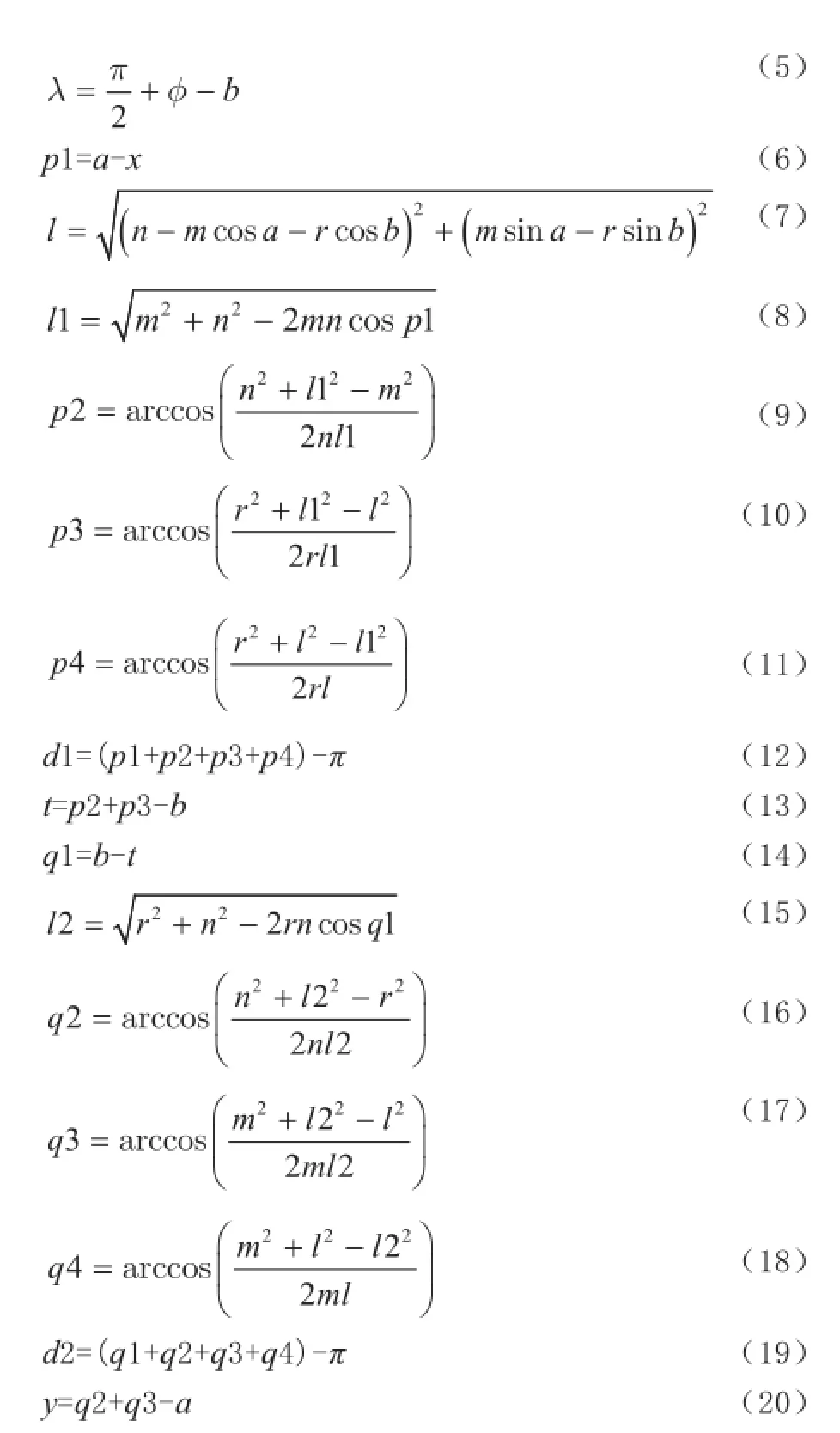
由圖3所示的四桿機(jī)構(gòu)運(yùn)動(dòng)關(guān)系,在已知梯形參數(shù)m、a、r、b的基礎(chǔ)上,當(dāng)內(nèi)輪轉(zhuǎn)角為x時(shí),通過(guò)三角函數(shù)公式,可以計(jì)算出外輪轉(zhuǎn)角y的大小:

1.3 斷開(kāi)式梯形優(yōu)化
對(duì)于斷開(kāi)式轉(zhuǎn)向梯形的優(yōu)化設(shè)計(jì),即要確定最優(yōu)的梯形參數(shù)m、a、r、b。在討論桿系運(yùn)動(dòng)過(guò)程中,梯形參數(shù)與內(nèi)外輪轉(zhuǎn)角關(guān)系的基礎(chǔ)上,將實(shí)際外輪轉(zhuǎn)角與阿克曼外輪轉(zhuǎn)角偏差的最小值作為梯形優(yōu)化的目標(biāo),并對(duì)梯形參數(shù)加以合理的約束條件,即可對(duì)其進(jìn)行參數(shù)優(yōu)化。
為了更好地反映車輛轉(zhuǎn)向過(guò)程,在最常使用的小轉(zhuǎn)角范圍內(nèi)的實(shí)際轉(zhuǎn)角與阿克曼轉(zhuǎn)角偏差要盡量小,以減小高速行駛時(shí)的輪胎磨損;而在不常使用且車速較低的大轉(zhuǎn)角下轉(zhuǎn)彎時(shí),轉(zhuǎn)角偏差可以稍大,以提高轉(zhuǎn)向機(jī)構(gòu)整體性能。因此,評(píng)價(jià)轉(zhuǎn)角偏差最小的目標(biāo)函數(shù)P中應(yīng)加入適當(dāng)?shù)募訖?quán)因子w(i)[5]。

式中,xi為內(nèi)輪轉(zhuǎn)角;yi為實(shí)際外輪轉(zhuǎn)角;y0i為阿克曼外輪轉(zhuǎn)角。
根據(jù)經(jīng)驗(yàn),確定梯形參數(shù)的初選值a為arctan(4L/3K),且m在(0.11-0.15)K的范圍內(nèi),x作為輸入條件,設(shè)x在0°~40°范圍內(nèi)取值。為了使轉(zhuǎn)向桿系在運(yùn)動(dòng)過(guò)程中不出現(xiàn)死點(diǎn),內(nèi)外轉(zhuǎn)向輪最大轉(zhuǎn)角之和應(yīng)滿足條件[3]:xmax+ymax≤70°。
根據(jù)轉(zhuǎn)向桿系運(yùn)動(dòng)時(shí)所建立的內(nèi)、外輪轉(zhuǎn)角與梯形參數(shù)關(guān)系的數(shù)學(xué)模型,實(shí)際外輪轉(zhuǎn)角與阿克曼外輪轉(zhuǎn)角偏差最小的目標(biāo)函數(shù)以及桿系運(yùn)動(dòng)時(shí)的約束條件,利用數(shù)值仿真軟件的優(yōu)化工具箱函數(shù)fmincon進(jìn)行轉(zhuǎn)向梯形參數(shù)優(yōu)化[6]。優(yōu)化結(jié)果,如表1所示。
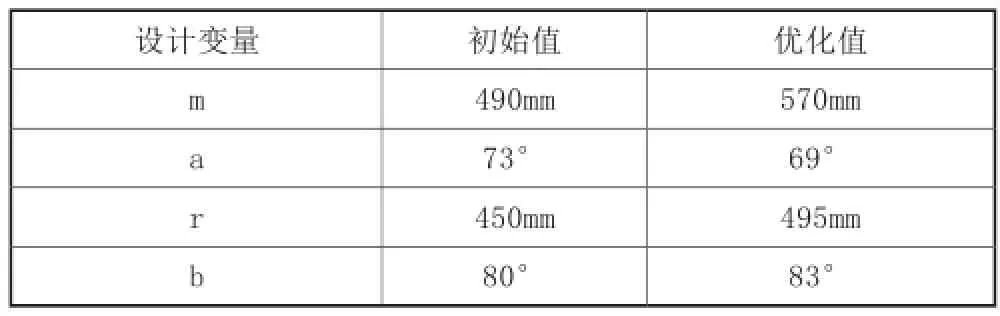
表1 梯形優(yōu)化結(jié)果
2 斷開(kāi)式轉(zhuǎn)向機(jī)構(gòu)仿真分析
將優(yōu)化所得梯形參數(shù)m、a、r、b帶入實(shí)際轉(zhuǎn)向桿系模型中,再對(duì)其進(jìn)行運(yùn)動(dòng)學(xué)有限元仿真分析,施加內(nèi)輪以0°~40°轉(zhuǎn)角,可得出相應(yīng)外輪的轉(zhuǎn)角大小。
圖4所示為阿克曼外輪轉(zhuǎn)角與實(shí)際外輪轉(zhuǎn)角隨內(nèi)輪轉(zhuǎn)角的變化曲線,圖5所示為阿克曼外輪轉(zhuǎn)角與仿真分析所得外輪轉(zhuǎn)角隨內(nèi)輪轉(zhuǎn)角的變化曲線。由圖4、5可以得出,隨著內(nèi)輪轉(zhuǎn)角的增大,實(shí)際外輪轉(zhuǎn)角和仿真分析值都在阿克曼轉(zhuǎn)角曲線上方,且保持變化趨勢(shì)一致。
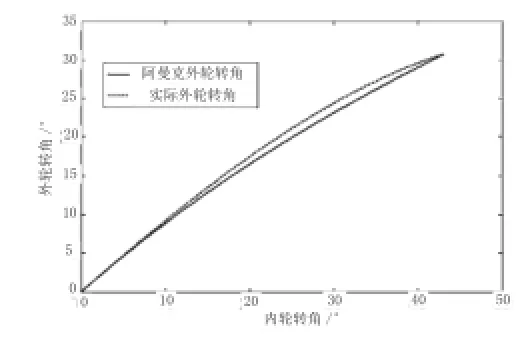
圖4 阿克曼外輪轉(zhuǎn)角與實(shí)際外輪轉(zhuǎn)角
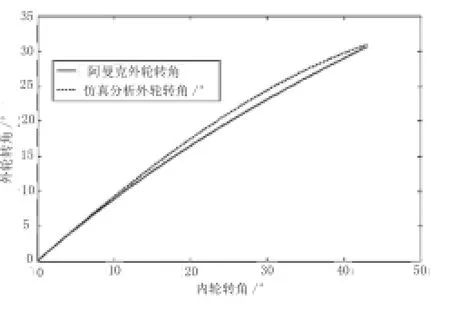
圖5 阿克曼外輪轉(zhuǎn)角與 仿真分析外輪轉(zhuǎn)角
在同一內(nèi)輪轉(zhuǎn)角下,將實(shí)際外輪轉(zhuǎn)角與阿克曼外輪轉(zhuǎn)角之差作為實(shí)際偏差,將仿真分析所得外輪轉(zhuǎn)角與阿克曼外輪轉(zhuǎn)角之差作為仿真分析偏差。實(shí)際偏差與仿真分析偏差隨內(nèi)輪轉(zhuǎn)角的變化曲線如圖6所示。由圖6可以得出,實(shí)際偏差與仿真分析偏差隨內(nèi)輪轉(zhuǎn)角的變化呈二次曲線的變化趨勢(shì),在內(nèi)輪轉(zhuǎn)角為29°時(shí)基本都達(dá)到最大值,仿真分析偏差略大于實(shí)際偏差,兩者變化趨勢(shì)保持一致。圖7所示為實(shí)際外輪轉(zhuǎn)角與仿真分析外輪轉(zhuǎn)角之差隨內(nèi)輪轉(zhuǎn)角的變化曲線。由圖7可以得出,隨著內(nèi)輪轉(zhuǎn)角的增大,此偏差值逐漸變大,但最大偏差僅為0.24°。
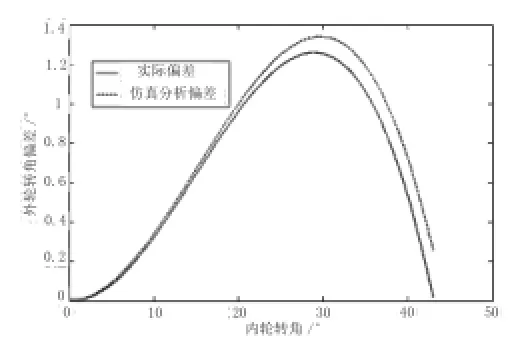
圖6 實(shí)際偏差與仿真分析偏差
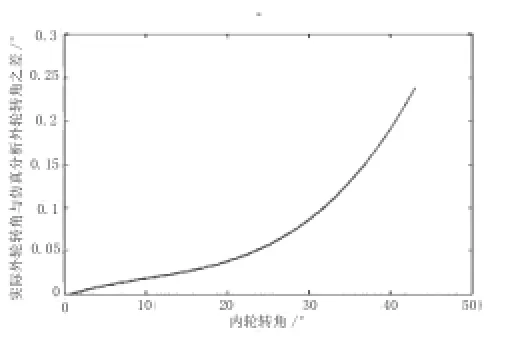
圖7 實(shí)際外輪轉(zhuǎn)角與仿真分析外輪轉(zhuǎn)角之差
3 結(jié)論
本文提出了基于數(shù)值仿真軟件的優(yōu)化工具箱函數(shù)實(shí)現(xiàn)斷開(kāi)式轉(zhuǎn)向梯形參數(shù)的設(shè)計(jì)方法,并通過(guò)運(yùn)動(dòng)學(xué)仿真分析,對(duì)設(shè)計(jì)結(jié)果進(jìn)行了驗(yàn)證,得出了實(shí)際內(nèi)、外輪轉(zhuǎn)角的變化關(guān)系與仿真分析結(jié)果基本保持一致。此外,在同一內(nèi)輪轉(zhuǎn)角下,外輪最大轉(zhuǎn)角偏差僅為0.24°,由此驗(yàn)證了本設(shè)計(jì)方法的正確性和實(shí)用性,可供實(shí)際設(shè)計(jì)時(shí)參考。
[1]余志生.汽車?yán)碚揫M].2版.北京:機(jī)械工業(yè)出版社,1996.
[2]崔亞輝,劉曉林,馬超峰,等.多輪重型車輛轉(zhuǎn)向機(jī)構(gòu)的設(shè)計(jì)分析[J].機(jī)械科學(xué)與技術(shù),2008,27(8):1052-1055.
[3]劉惟信.汽車設(shè)計(jì)[M].北京:清華大學(xué)出版社,2001.
[4]張德坤,李立順,孟祥德.基于MATLAB的某特種車轉(zhuǎn)向輪四連桿機(jī)構(gòu)設(shè)計(jì)[J].專用汽車,2011,(7):64-67.
[5]王望予.汽車設(shè)計(jì)[M].北京:機(jī)械工業(yè)出版社,2004.
[6]李軍.基于MATLAB優(yōu)化工具箱的農(nóng)用運(yùn)輸車轉(zhuǎn)向梯形優(yōu)化設(shè)計(jì)[J].農(nóng)機(jī)化研究,2011,33(5):147-150.
Separation Type Steering Trapezium Design and Kinematic Simulatio-n Analysis of the Mining Dump Truck
ZHOU Xintao1,MA Na2,SHENG Jialu1,CHEN Jingtao1,YU Shaojie2
(1.Xi’an Autotechnology Vocational College,Xi’an 710038;2.Shaanxi Tonly Heavy Industries CO.,LTD.,Xianyang 712000)
Based on steering kinematics theory, the relationship between the rotational angle of steering wheel and the parameters of steering trapezium is analyzed. With the minimum deviation between the actual and the Ackerman corners as the design goal, the main parameters of steering trapezium is optimized by using toolbox of MATLAB. Then the simulation analysis of the optimized parameters is made, the consistency of the results is obtained by compared between the actual and simulation corners, and the results verify the feasibility of the optimization design method.
splitting type, steering trapezium, optimal design, simulation
西安汽車科技職業(yè)學(xué)院科研基金重點(diǎn)項(xiàng)目(2016KJ004)。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費(fèi)導(dǎo)刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45

- 現(xiàn)代制造技術(shù)與裝備的其它文章
- “機(jī)電一體化系統(tǒng)設(shè)計(jì)”課程研究性學(xué)習(xí)實(shí)踐與探索
- TRIZ機(jī)械創(chuàng)新設(shè)計(jì)方法的教學(xué)軟件設(shè)計(jì)
- 挖掘機(jī)節(jié)能液壓控制系統(tǒng)分析與應(yīng)用
- 礦井采區(qū)運(yùn)輸系統(tǒng)中皮帶自動(dòng)化技術(shù)改造
- 基于PLC的立體車庫(kù)控制系統(tǒng)研究
- 機(jī)械設(shè)計(jì)制造及其自動(dòng)化中計(jì)算機(jī)技術(shù)的應(yīng)用分析