基于非均勻粒度聚類的電子目標多傳感器識別
2016-04-09 03:09:52陳婷,郭凱,陳衛
無線電工程 2016年3期
陳 婷,郭 凱,陳 衛
(陸軍軍官學院 無人機教研室,安徽 合肥 230031)
?
基于非均勻粒度聚類的電子目標多傳感器識別
陳婷,郭凱,陳衛
(陸軍軍官學院 無人機教研室,安徽 合肥 230031)
摘要在對電子目標進行識別時,一般采取多傳感器融合的D-S證據理論,但是在實際應用中,證據理論存在不同證據沖突的問題。針對此問題,將證據轉化成歐氏空間中的點,證據之間的沖突程度轉化成距離,對證據進行聚類,用經過聚類后的證據來實現電子目標多傳感器融合識別。仿真實驗的結果證實了該方法的有效性和實用性。
關鍵詞電子目標;粒度;證據理論;證據沖突;歐氏距離;證據聚類
The Research on Electronic Target Recognition with Multi-sensor Based on Uneven Granularity Clustering
CHEN Ting,GUO Kai,CHEN Wei
(UAVTeachingandResearchSection,ArmyOfficerAcademyofPLA,HefeiAnhui230031,China)
AbstractWhen recognizing the electronic targets,the theory of D-S evidence with syncretic multi-sensor is usually applied.But in fact,the problem of evidence conflict in D-S theory always exists.For this problem,evidence is transformed to a point in Euclidean space first in this paper,the conflict degree between evidences is transformed to distance,and then the evidence clustering is done according to the distances,the evidence after clustering is used to realize multi-sensor electronic target recognition lastly.Simulation test and its results show that this method is effective and practical.
Key wordselectronic target recognition;granularity;evidence theory;evidence conflict;Euclidean distance;evidence clustering
0引言
隨著空間偵察探測手段的多樣化,傳感器數目和種類日益增加,獲得的信息也越來越多,多種多樣的信息表達形式使得信息的處理變得復雜。人們越來越希望傳感器系統在獲取原始信息的基礎上增加智能分析和判斷的能力,作為一種對經典概率的擴展,證據理論在信息融合以及目標跟蹤和識別技術中得到了廣泛應用,但是在實際應用中,隨著傳感器和目標數目的增加,證據理論存在不同證據沖突的問題[1,2]。
針對證據沖突的問題,應用基于商空間的非均勻粒度聚類方法[3],將其與D-S證據理論結合,提出一種新的非均勻粒度證據聚類方法,并將其用于電子目標多傳感器融合識別中,一定程度上解決了證據沖突的問題。
1證據理論


?A∈Ω且A≠φ時,稱m(A)為Ω上的基本概率賦值(Basic Probability Assignment),也有人稱之為A的Mass函數。定義在Ω上的一個m(·)就構成了識別框架Θ上的一個證據。m(A)>0的命題稱為證據的焦點元素或焦元[4]。
定義2:Θ為一識別框架,m(A)為Ω上的基本概率賦值函數,滿足下列條件的函數為信任函數(Belief Function)[5]:
2證據空間到歐氏空間的轉換
2.1證據的清晰化
分析焦元的形式可知,焦元可能是單命題形式,也可能是多命題形式。單命題對應辨識框架中的基本假設,所以給出的結論是清晰的;而多命題是各基本假設的組合,所以給出的結論是模糊的。在實際應用證據理論組合證據時,有時得不到清晰的結論(單命題結論),因此就需要一種手段來消除這種模糊性,以確定最有可能的結論,即證據的清晰化[6]。
Philippe Smets[7]在其傳遞信任函數模型中詳細論述了如何將信任度(Bel)轉化成概率(Probability)的問題,并定義為概率轉化過程(用Γ表示),用Γ得到的概率為BetP,即BetP=Γ(Bel,F),其中F是在傳遞過程中辨識框架中實際可能的基本命題的集合。他認為當一個基本信任分配(Basic Belief Assignment,BBA)m賦予的是一個多命題焦元,如m(t)時,該命題包含的每個單命題獲得的BBA值應該是相等的。用BetP來計算:

(1)

這樣,利用式(1)可將所有證據轉化成單命題形式的概率分配形式,可以稱之為證據的清晰化處理。
2.2證據在歐氏空間中的表示
假設證據空間為E,E是由焦元“張成”的。嚴格地說,由于焦元之間的互相覆蓋(不相互正交),證據空間只是一個集合,而不是真正的空間,也因此造成了證據在E中的位置無法確定,使得通常的解決點聚類問題的方法無法直接用于證據聚類[8]。
一個含有n個互斥命題的辨識框架Θ等效于一個n維的歐氏空間Sn,辨識框架中的基本命題Sn就是Sn中的基。由此,將證據根據式(1)進行清晰化處理之后,就可以在歐氏空間表示出來。由于BetP在Sn的各個方向上最大取值為1,所以證據在Sn中的位置在邊長為1的n邊體內,真實事件的各種狀態在n邊體的各頂點。
證據在Sn中表示出來后,由于不確定性,其坐標通常不在該n邊體的頂點上,而是在該正交多面體中間的某個點,其最靠近的頂點所表示的基本命題就是該證據最可能的假設[9]。
3非均勻粒度證據聚類方法
證據通過清晰化處理后,就取得了一個坐標值,即相當于歐氏空間里的一個點,有了點坐標值,就可以利用點聚類的方法進行證據聚類了。
在實際中,在獲得確切情報前,往往對當前出現事件的準確數目是未知的,因此無法確定將得到的證據聚成幾類才能反映真實情況。為了解決這個問題,將基于商空間的非均勻粒度聚類算法應用于證據聚類。
3.1證據非均勻粒度聚類方法
根據前述內容得到的結論,將所有待聚類的證據樣本都轉化到歐氏空間中的坐標點,這樣就得到了點聚類問題中的數據點,利用非均勻粒度聚類算法對這些數據點進行聚類,就得到了非均勻粒度證據聚類方法,其具體方法步驟如下[10]:
① 將得到的證據進行清晰化處理,得到所有證據對應的點坐標;
② 初始化粒度dλ;
③ 計算每對證據數據點xi,xj的距離d,如果d≤dλ,則xi,xj所在的類進行合并;
④ 如果要繼續考察聚類結果,每個子類,調整粒度和證據空間,對新的證據空間聚類。
其中,步驟②中的粒度dλ也稱為距離閾值,它的取值一般為1>dλ>0.5[11]。本方法通過對證據空間按照非均勻粒度來進行聚類,從而實現了對證據空間聚類結果的非均勻粒度考察,同時,將聚類數目的確定轉化為粒度的合理選取問題。
3.2粒度的選取問題
在實際應用中,粒度的選取問題可以有多種方法,概括起來,主要有以下3種[12]:
① 根據先驗知識和專家經驗,選擇合理的粒度;
② 對不同的聚類結果進行分析,建立一定的聚類評價準則進行評價,自適應選擇最合理的粒度,對應于最終的聚類結果;
③ 結合其他的情報或者位置信息進行選取。
3.3證據聚類的合成方法
應用上述非均勻粒度證據聚類方法將證據分為c類,可以避免2個沖突較大的證據分在同一組內,從而避免了沖突證據的合成[13]。

另設第l類中證據的個數為S(l),l=1,2,…,c。依據各類中所包含的證據的個數確定該類證據的加權系數:
(2)
對所有分類合成證據做加權平均可得最終的合成證據為:
(3)
4仿真實驗分析
4.1仿真1
假設在對某一電子目標o1進行偵察時,電子目標自動識別系統中有13個傳感器(或者不同周期提供數據)提供未知電子目標的類型信息,考慮目標關聯錯誤和信號干擾等因素,第3條、第5條和第10條證據受到干擾,與其他證據沖突,得到的各傳感器對目標的基本概率賦值如表1所示。表1中,o代表目標類型,m代表傳感器(下同)。
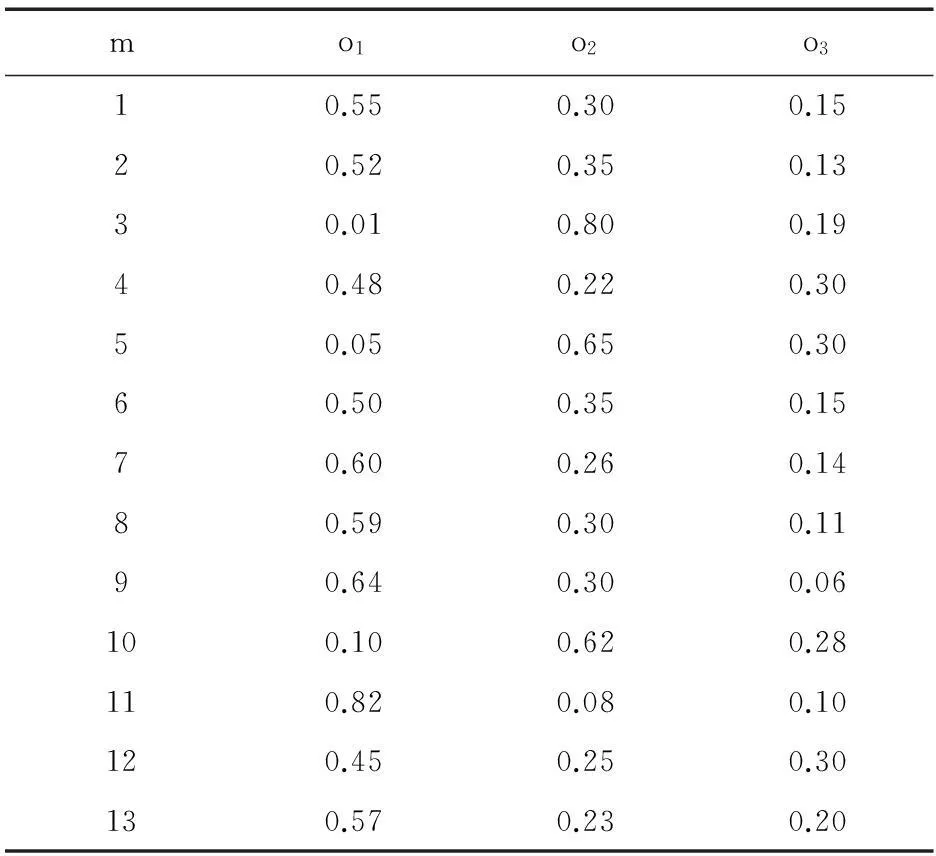
表1 13條證據的基本概率賦值
根據粒度選取方法1最終確定粒度dλ=0.97,基于非均勻粒度證據聚類算法可以將以上證據分為2類,如圖1所示。由圖1可以看到,經過聚類,3條干擾證據被分為一類,其他一致證據被分為一類。
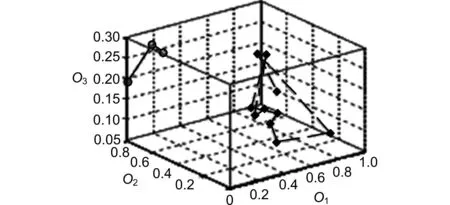
圖1 證據聚類結果
在初步分類的基礎上對證據進行融合,就可以得到融合結果。與D-S直接合成方法進行對比,得到的融合結果如表2所示。
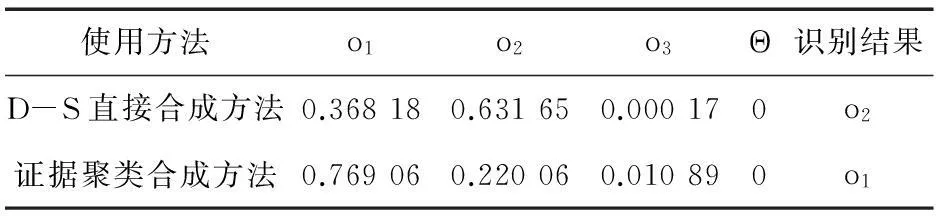
表2 有3條干擾證據時各種證據組合方法比較
從表2中可以看出,由于干擾沖突證據的原因,直接使用證據理論不能區分干擾證據,將所有證據同等對待,得到的結果不能正確識別目標;用新方法可以將干擾證據與一致證據區別對待,經過加權處理,降低了不確定性,能夠正確識別目標。
4.2仿真2
假設表1中的第1條證據m1(o1)=0.55,m1(o2)=0.30,m1(o3)=0.15也被干擾,干擾后的證據為:m1(o1)=0.25,m1(o2)=0.10,m1(o3)=0.65,經計算確定粒度dλ=0.96,基于非均勻粒度證據聚類算法可以將以上證據分為3類,如圖2所示。
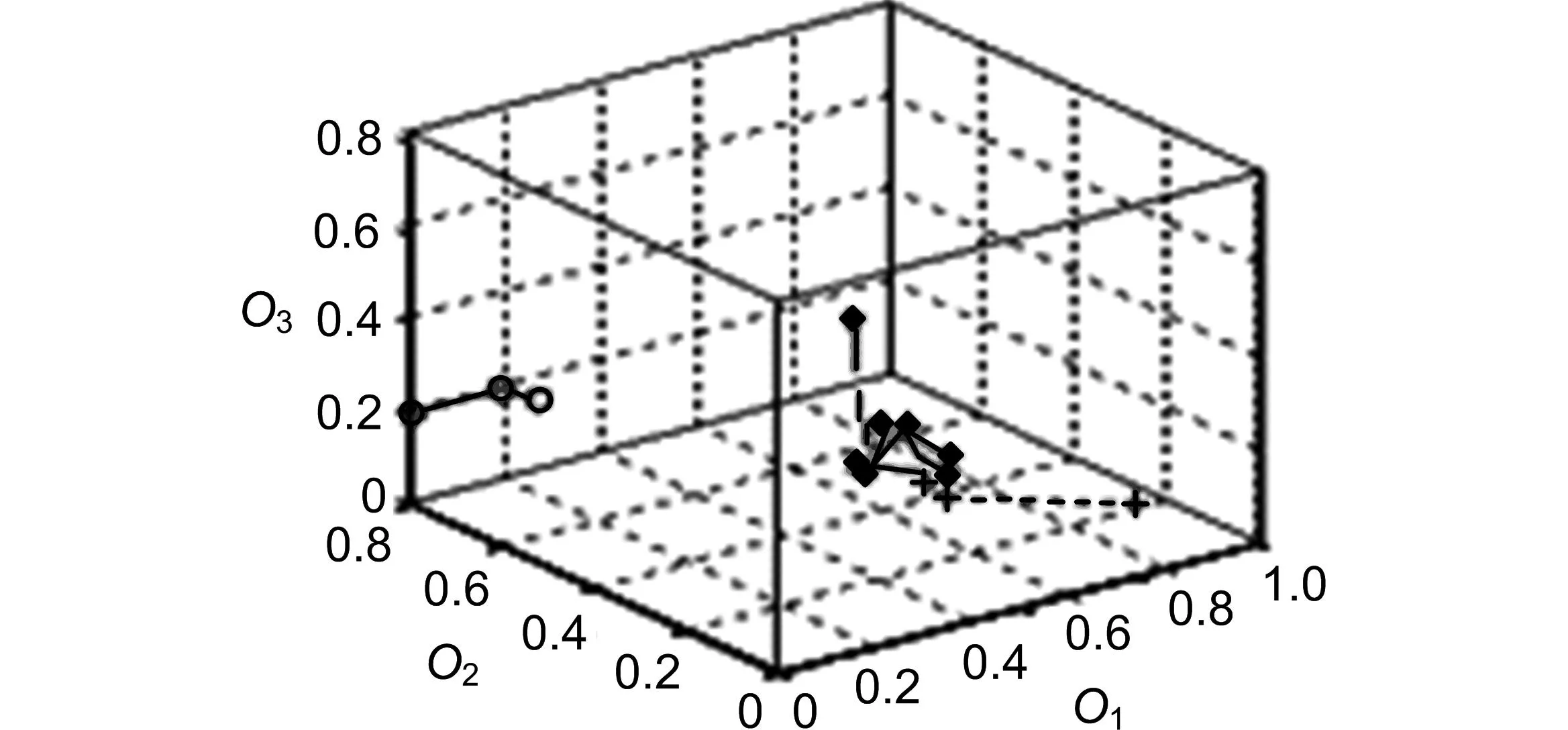
圖2 證據聚類結果
證據合成后得到的識別結果如表3所示。
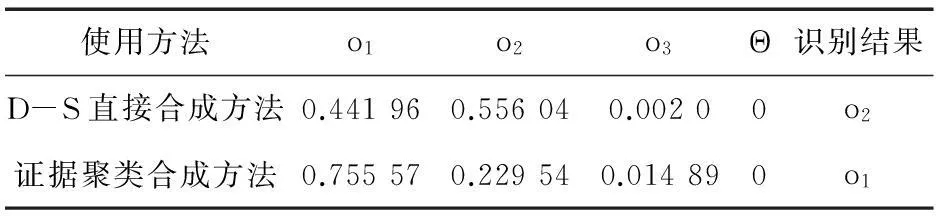
表3 有4條干擾證據時各種證據組合方法比較
從表3中可以看出,當干擾證據增多時,直接使用證據理論不能正確識別目標,用證據聚類合成新方法可以將干擾沖突證據與一致性證據區別對待,經過加權處理,降低了不確定性,能夠正確識別目標,得到了很好的效果。
從以上仿真實驗可以看出,基于非均勻粒度聚類的證據合成方法能夠對證據進行有效分類,將干擾證據與一致證據區別對待,具有良好的融合性能。
5結束語
隨著智能信息處理技術的發展,各種不同的目標融合識別方法將更加智能化,并且不斷交叉融合,在實際應用中產生了眾多性能優異的目標識別融合方法。本文將粒度聚類與證據理論相結合,降低了證據的沖突和不確定性,有效地提高了目標識別的準確率,作為一種信息分類技術,這對于解決干擾條件下多傳感器目標融合識別問題提供了一種有效途徑,將在信息融合和目標識別等領域有較好的應用前景。
參考文獻
[1]韓崇昭,朱洪艷,段戰勝.多源信息融合[M].北京:清華大學出版社,2006.
[2]DAVID L H.An Introduction to Multi-sensor Fusion[C]∥International Workshop on Data Fusion,2002:112-114.
[3]徐峰,張鈴.基于商空間的非均勻粒度聚類分析[J].計算機工程,2005,31(3):26-28.
[4]楊春,李懷祖.一個證據推理模型及其在專家意見綜合中的應用[J].系統工程理論與實踐,2001(4):43-48.
[5]石閃閃.一種新的基于證據權重的D-S改進方法[J].科學技術與工程,2014,14(8):205-208.
[6]周大偉,葉清.基于互沖突量和自沖突量分析的證據聚類方法[J].火力與指揮控制,2011,36(6):39-41.
[7]SMETS P,KENNES R.The Transferable Belief Model [J].Artificial Intelligence,1994,66(2):191-234.
[8]朱衛未,王衛平,梁樑.基于模糊聚類分析的入侵檢測方法[J].系統工程與電子技術,2006,28(3):474-477.
[9]LAWRENCE A K.Sensor and Data Fusion Concepts and Applications[M].Washington:SPIE Optical Engineering Press,1999.
[10]徐麗,丁世飛.粒度聚類算法研究[J].計算機科學,2011,38(8):25-28.
[11]嚴曉蘭.基于粗集理論證據加權的電子目標識別法[J].現代防御技術,2011,39(4):75-79.
[12]卜東波,白碩,李國杰.聚類/分類中的粒度原理[J].計算機學報,2002,25(8):810-816.
[13]JOUSSELME A L,GRENIER D,BOSSE E.A New Distance Between Two Bodies of Evidence[J].Information Fusion,2001,2(1):91-101.
陳婷女,(1982—),博士,講師。主要研究方向:信號處理與模式識別。
郭凱男,(1976—),博士,講師。主要研究方向:無線通信和無人機工程。
作者簡介
收稿日期:2015-12-01
中圖分類號TN957.51
文獻標識碼A
文章編號1003-3106(2016)03-0018-04
doi:10.3969/j.issn.1003-3106.2016.03.06
引用格式:陳婷,郭凱,陳衛.基于非均勻粒度聚類的電子目標多傳感器識別[J].無線電工程,2016,46(3):18-21.
