機載Lidar點云精度檢測及誤差控制措施
2016-04-13 03:26:29謝春喜
鐵道勘察 2016年1期
關鍵詞:檢測
謝春喜
(鐵道第三勘察設計院集團有限公司,天津 300251)
?
機載Lidar點云精度檢測及誤差控制措施
謝春喜
(鐵道第三勘察設計院集團有限公司,天津300251)
Accuracy Detection and Error Control Measure of Airborne Lidar Point Cloud
XIE Chunxi
摘要機載Lidar技術集成了激光、POS、計算機、航空攝影測量等多種技術,相對于傳統航測技術,具有點云密度高、工作效率快、受天氣影響程度小、數據精度高、成果豐富等特點。結合實際工程項目,應用檢測裝置進行機載Lidar點云精度檢測,并總結出機載Lidar點云數據處理過程中的誤差控制措施。
關鍵詞點云檢校GPS 測量精度檢核誤差來源
機載激光雷達系統是一種集全球導航系統、慣性導航系統與激光掃描儀于一體,用于獲取三維信息的遙感系統。機載激光雷達技術作為一種信息獲取的全新手段,是繼GPS空間定位系統之后又一項測繪技術的新突破,被視為航天、航空領域中最具代表性的高新測繪技術之一[1,2]。機載激光掃描傳感器發射的激光脈沖能部分地穿透樹林遮擋,可直接獲取真實地面的高精度三維地形信息。與其他遙感技術相比,該技術具有點云密度高、工作效率快、受天氣影響程度小、數據精度高、成果豐富等特點,使其在地形測繪、鐵路勘測、資源調查等領域具有獨特的優勢,機載Lidar已成為工程航測領域的新生代力量,而其精度將影響該技術大規模工程化應用的廣度和深度。為此,精度檢測和誤差控制是進一步大規模深化應用前必須要做而且首先要做的基礎性工作[3-5]。
1工作原理
機載Lidar系統的主要組成部分如圖1所示[6-7]:①動態差分GPS 接收機,用于確定掃描投影中心的空間位置;②姿態測量裝置,用于測量掃描裝置主光軸的空間姿態參數;③激光掃描測距系統,用于測量傳感器到地面點的距離;④成像裝置(CCD相機),用于獲取對應地面的彩色數碼影像,制作正射影像或其他專題圖。
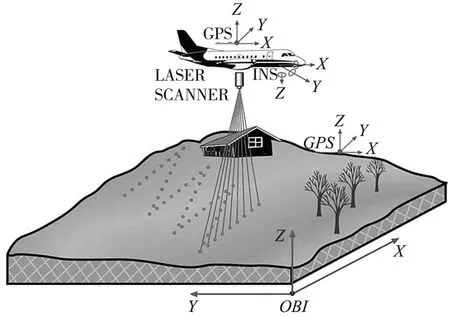
圖1 機載Lidar主要組成部分和工作原理
航攝時,由差分全球定位系統確定傳感器在空中的三維精確位置,由姿態測量裝置(IMU)測定飛機的仰俯角、側滾角和航向角,由激光測距儀直接測量地形起伏情況。其對地定位原理為[8]:
假設傳感器在空中的投影中心G點的三維坐標(XG,YG,ZG)已知,傳感器投影中心到待定點P(XP,YP,ZP)的矢量S可以精確測出,根據矢量求解原理,可以求出待定點P的三維坐標。

式中:b=cosω·sinα·cosκ+sinκ·sinω
傳感器在空中的投影中心G點的三維坐標(XG,YG,ZG)由差分GPS 提供;傳感器空中姿態參數(φ,ω,κ)由IMU提供,θ為激光測距點P對應的像元與掃描周期內中間像元(即所謂的機下點)之間的夾角,由激光掃描器給出。上述(X0,Y0,Z0,φ,ω,κ,θ,S)均為已知,即可求出任意待定點的三維坐標(Xi,Yi,Zi)。
2機載Lidar點云和影像精度檢測
2.1機載Lidar點云平面精度檢測
Lidar點云盡管有一定的密度,但相對于影像而言是離散的,因此不能用檢測影像平面精度的方式檢測點云平面精度[9]。由于點云均勻且盲目分布的特點,也不能像全站儀那樣通過特定點來檢測其平面精度。為此,通過直線擬和求交叉點的方法來檢測點云平面精度。
黑龍江省哈爾濱某設定檢測區,丘陵地形,植被覆蓋率約70%,以3個相對航高總計飛行14條航線,其中相對航高1 350 m的4條,1 200 m的2條,600 m的8條,平均點間距0.45 m,點云密度5個點/m2。實驗中用到了發明專利[10]—機載激光雷達點云平面精度檢測裝置和另一種自制的點云平面檢測裝置(如圖2、圖3所示)。

圖2 點云平面精度檢測裝置

圖3 點云平面精度檢測自制裝置
實際飛行航線和裝置分布情況見圖4、圖5。
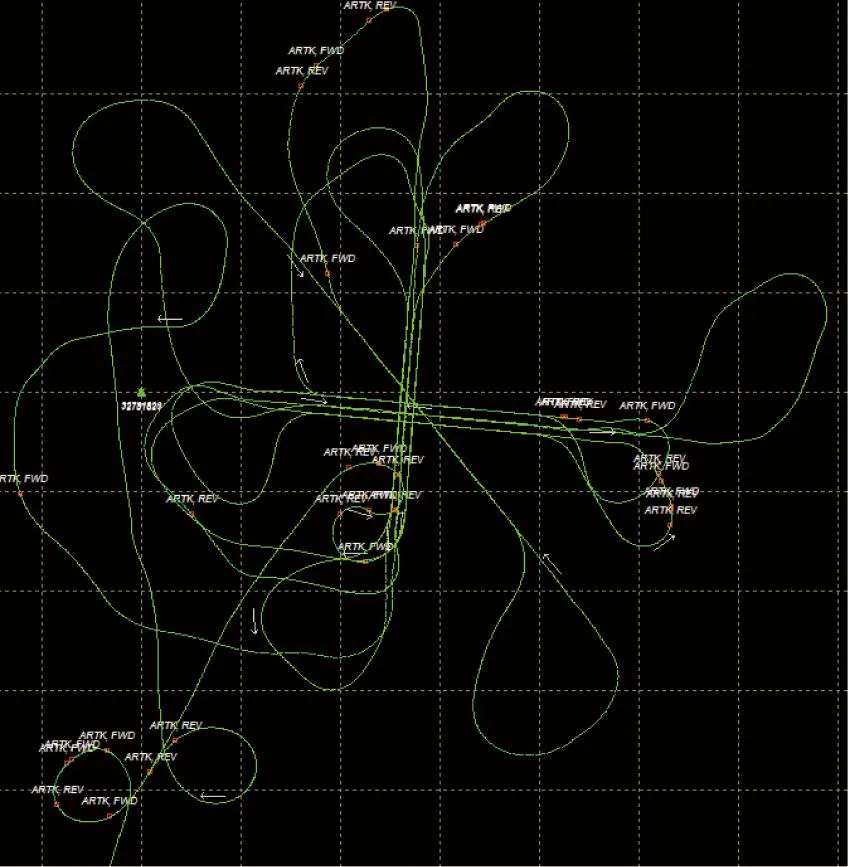
圖4 數據獲取航跡

圖5 點云平面精度檢測裝置分布
首先,根據高程檢測出打到裝置上的點云,然后應用線性回歸分析法擬和出反射天線,最后根據3條反射天線(檢測裝置)或兩條反射天線(自制裝置)計算交叉點坐標。
將擬和后求交叉點坐標與按照四等GPS實測的外業坐標成果進行比對,其差值統計如表1。
統計得出實測坐標與擬和坐標差值在X方向中誤差為0.049 m,Y方向中誤差為0.032 m。
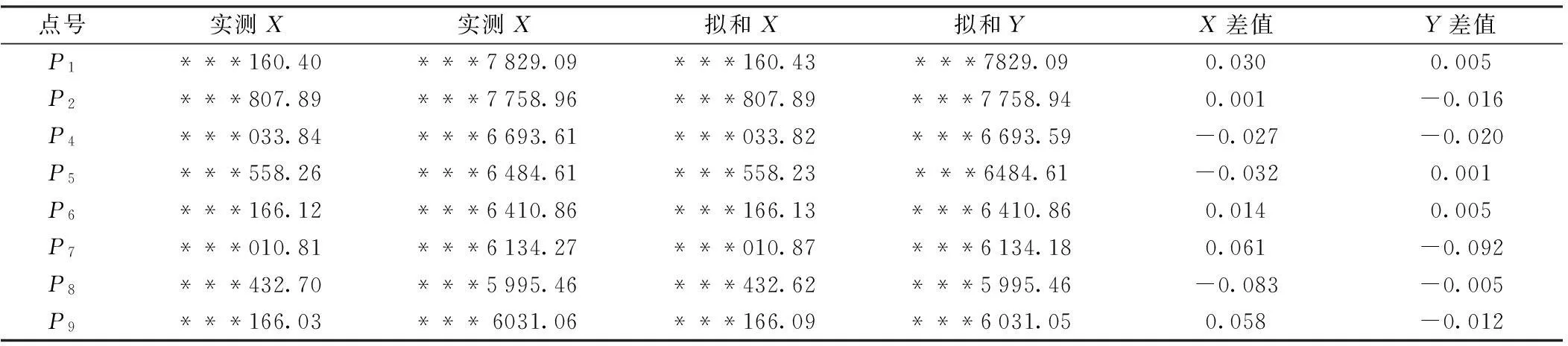
表1 點云平面檢測裝置點云擬和坐標與GPS實測坐標差值 m
2.2機載Lidar點云高程精度檢測
在測區布設9塊材質相同的平板來檢測點云高程精度,布設后平板的四角和中心的高差不超過5 mm(如圖6)。

圖6 點云高程精度檢測裝置
統計出落在每塊平板上點云的高程均值,然后與四等水準測得的平板高程值進行比對,其差值統計如表2。
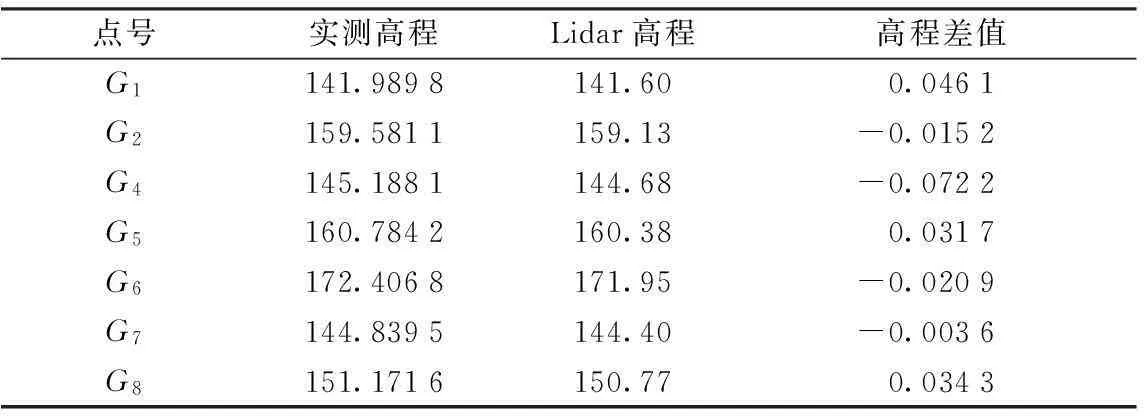
表2 點云高程檢測裝置點云高程與GPS實測高程差值 m
統計得出實測高程與Lidar高程差值中誤差為0.041 m。
將檢測區的點云根據高程控制點進行GeoID改正,在具有一定坡度呈“十”字交叉的兩條公路上實測了60個高程點,將經過GeoID改正后的地面點云與實測路面高程點進行比對,其高程中誤差為0.037 m。
2.3機載Lidar影像平面精度檢測
在檢測區范圍內均勻布設了9個地面標志,應用無約束自由網平差和約束平差分別進行空三加密,然后與檢查點進行精度檢核。
(1)自由網平差
基于POS數據進行無約束空三加密,在影像上量測出的地面標志坐標與四等GPS實測的坐標進行比對,差值如表3。

表3 自由網平差后地面標志立體量測值與實測值差值 m
統計得出X方向中誤差為0.196 m,Y方向中誤差為0.124 m,Z方向中誤差為0.151 m,Z方向的立體量測值比GPS實測值高出0.725 m。
(2)約束網平差
基于POS數據,采用4個控制點進行約束平差,在立體像對上量測出3個檢核點坐標與四等GPS實測的坐標進行比對,差值如表4。
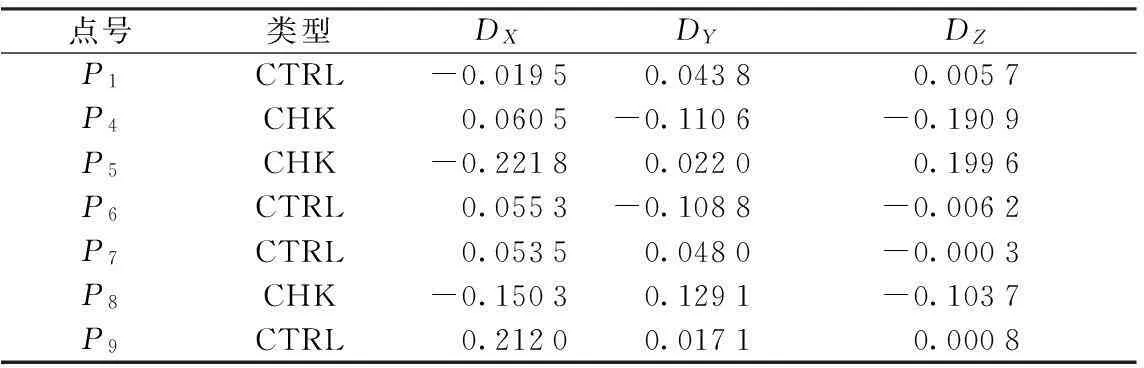
表4 約束網平差后地面標志立體量測值與實測值差值 m
統計得出X方向差值中誤差為0.158 m,Y方向差值中誤差為0.099 m,高程差值中誤差為0.119 m,高程的立體量測值比水準實測值低0.013 m,相對于無約束平差而言,高程值與水準實測值更加接近、精度更高。因此,應在約束網平差后的立體像對上采集地形特征線和特征點,用于制作精細DEM成果。
2.4點云平面精度與影像平面精度對比
實驗中在7個已知點上同時設置點云檢測裝置和影像檢測標志,采用點云擬合反射天線求交叉點坐標得到已知點坐標,并且在約束網平差后的立體像對上量測已知點坐標,得到兩套坐標及差值(如表5)。

表5 點云與影像平面精度對比 m
統計得出X方向差值中誤差為0.096 m,Y方向差值中誤差為0.144 m,表明點云平面精度較高,后續處理時應以點云數據為基準改正影像的平面位置,進而提高立體采集DLG和制作DOM的精度。
3機載Lidar誤差控制措施
3.1POS解算
POS系統是機載激光探測與測距系統的關鍵,也是必備的部件,其核心思想是采用動態差分GPS技術和慣性測量裝置直接在飛行中測定傳感器的位置和姿態,并經嚴格的聯合數據處理(即卡爾曼濾波),獲得高精度的傳感器外方位元素,從而實現無或極少地面控制的傳感器定位和定向。
機載Lidar采用動態載波相位差分GPS系統,利用安裝在Lidar上的動態GPS接收機,與設在一個或多個基準站的至少兩臺GPS信號接收機同步而連續地觀測CPS衛星信號,同時記錄瞬間激光和數碼相機開啟脈沖的時間標記,通過載波相位測量差分定位技術的離線數據后處理獲取Lidar的三維坐標。由此可見,GPS信號強度對POS解算后得到的外方位元素成果精度至關重要。為此,在飛行前務必進行GPS星歷預測,選擇GPS星歷好的時間段進行檢校場數據獲取,條件容許的話設置兩個及以上地面基站,附件如有CORS站宜優先采用。采用POS解算軟件進行解算時應根據數據質量分時段進行解算。
3.2Lidar檢校
目前,Lidar檢校有手工檢校、基于特征面、基于特征線三種檢校方式,基于特征線方式檢校效率最高,并且對檢校場的地形地貌條件要求相對較低。因此,一般采用基于特征線的Lidar檢校方式。為了得到較好的檢校精度應選擇植被覆蓋少、有一定地形起伏、硬質路面和尖頂房較多的區域作為檢校場。檢校時首先分條帶進行點云濾波分類,分離出地面點和建筑物點,根據點云密度情況設置搜尋連接線的最佳參數(搜索范圍,連接線長度,XY方向最大容許誤差,Z方向最大容許誤差等)。然后調整連接線,其中包括刪除選定的連接線或者大于某一限差的連接線,同時可以增加地面線、斷面線、已知線等,最后根據自動尋找的連接線和手動增加的連接線解算出檢校參數。
3.3波動改正
Lidar檢校消除了系統安置誤差,對飛行過程中由于GPS信號問題可能會造成局部漂移誤差所做的波動改正是提高機載Lidar數據精度的另一重要環節。
計算當前特征線相對于通過多航帶數據得到的特征線平均位置改正量,航跡線解算后得到的每條航跡定位精度估計值在計算平均位置時將轉換為權重因子,低精度條帶上的特征線將獲得更大的改正量,高精度條帶上的特征線將獲得更小的改正量。根據改正量擬和出改正曲線,然后對所有點云數據進行改正。處理時需要調整波動曲線的光滑度,光滑度與航跡定位精度估計值密切相關,當精度估計值低時采用更大的改正值。權重因子決定改正曲線的變化速率,權重因子愈小改正曲線愈光滑。連接線質量不太好并且可能包含異常值時應采用較小的權重因子,連接線質量較高時,應該采用較大的權重因子。
統計波動改正前后6條航線間共20個點處的接邊差,見圖7。
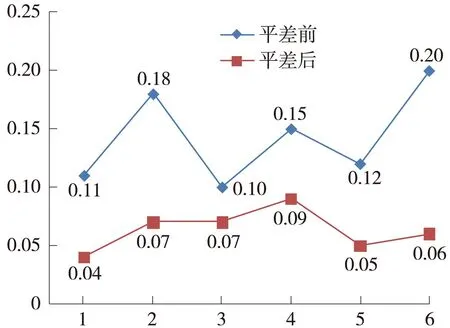
圖7 平差前后接邊差對比
可見,經過波動改正后航線間的接邊差得到明顯改善。
4結論
從點云平面裝置檢測實驗得出的結果看, Lidar點云的平面精度與高程精度處于同級水平,只是由于Lidar點云的離散性才使得其平面精度受到點云間距的限制,為此可用影像彌補平面精度不足,加上激光雷達點云本身較高的高程精度,將在鐵路勘測領域擔當更加重要的角色,發揮更加重要的作用。
參考文獻
[1]高文峰,王長進.鐵路勘測中使用機載激光雷達測繪橫斷面相關問題的探討[J].鐵道勘察,2010(2)
[2]王長進.機載激光雷達鐵路勘察技術[M].中國鐵道出版社,2010
[3]韓改新. 機載激光雷達(Lidar)技術在鐵路勘測設計中的應用探討[J].鐵道勘察,2008,34(3):1-4
[4]朱士才.Lidar的技術原理以及在測繪中的應用[J].現代測繪,2006,29(4)
[5]賴旭東,鄭學東,萬幼川.激光雷達技術在數字流域中的應用探討[J].長江科學院學報,2005,22(5)
[6]李樹楷.機載/車載激光掃描測距/成像制圖系統的新進展[J].中國圖像圖形學報,1999,4(2):89-93
[7]廖麗瓊.地面激光雷達的數據處理及其精度分析[J].四川測繪,2004,12:153-155
[8]尤紅建.激光三維遙感數據處理及建筑物重建[M].北京:測繪出版社,2006
[9]鐵道第三勘察設計院集團有限公司.機載激光雷達點云平面精度檢測裝置:2011 1 0357366.0[P].2011-05-16
[10]張小紅.機載激光雷達測量技術理論與方法[M].武漢:武漢大學出版社,2007
中圖分類號:P225.1
文獻標識碼:B
文章編號:1672-7479(2016)01-0019-04
作者簡介:謝春喜(1983—),男,碩士,工程師。
收稿日期:2015-12-15
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
