潛艇自航模水聲定位系統的設計與實現*
2016-04-15 08:30:13尚留賓陳志誠
艦船電子工程 2016年3期
關鍵詞:數據采集
尚留賓 魏 軍 陳志誠
(海軍工程大學 武漢 430033)
?
潛艇自航模水聲定位系統的設計與實現*
尚留賓魏軍陳志誠
(海軍工程大學武漢430033)
摘要為滿足潛艇自航模試驗中目標定位的需要,針對某型潛艇自航模型設計和實現了一套水聲定位系統。系統結合水聲接收、發射等相關特定硬件設備實現了對水中目標數據實時采集、處理、監測。系統還具有傳感器延時標定、數據實時采集處理、軌跡顯示、數據存儲等功能,對多通道數據采集同步、野點修正等問題進行了處理。最后通過對比水聲定位系統軌跡與GPS軌跡,結果表明,該水聲定位系統能夠實現對自航模型的精確二維定位。
關鍵詞自航模; 水聲定位; 數據采集; 數據同步; 二維定位
Design and Implementation of Underwater Acoustic Positioning System in Submarine Self-propelled Model
SHANG LiubinWEI JunCHEN Zhicheng
(Naval University of Engineering, Wuhan430033)
AbstractTo meet the demands of the submarine target positioning in self-propelled model experiment, a set of underwater acoustic positioning system is designed and implemented according to a certain type of submarine self-propelled model. Combined with certain acoustic receiving and launching hardware, the goal of real-time data acquisition, processing, testing of underwater target is achieved. The system also possesses the functions such as sensor delay calibration, track display, data storage, and can solve the problems such as multichannel data acquisition synchronization and abnormal points. Finally, the comparison between acoustic positioning and GPS trajectory shows that the underwater acoustic positioning system can realize the accurate two-dimensional positioning of self-propelled model.
Key Wordsunderwater acoustic positioning, self-propelled model, data acquisition, data synchronization, two-dimensional positioning
Class NumberTP399
1引言
水下自航模試驗對于研究潛艇在復雜環境條件下的機動性、操縱性等具有獨特的優勢[1]。由于潛艇自航模型在水下運動,在空氣中常用來傳遞信息的介質如光波和無線電波等在水中會產生較大的衰減,因此基于聲波探測的水聲技術是獲取和傳遞水下信息最有效的手段之一[2]。目前水聲定位廣泛應用于水下機器人、大型船舶、水下無線網絡傳感器定位等[3~5]。對于潛艇自航模型的定位應用較少,而且大多集中在水聽器的布陣形式、定位算法的研究上,缺乏對潛艇自航模水聲定位系統整體的研究和工程實踐[6~9]。本文首先針對潛艇自航模試驗具體工程試驗環境[10],結合系統硬件條件,從系統的角度出發利用LabVIEW設計和實現了潛艇自航模水聲定位系統。其次采用水面船舶自航模型作為試驗對象,以水面船舶的GPS定位作為參考,對設計的水聲定位系統定位能力進行檢驗分析,并針對試驗環境中出現的實際問題對定位系統進一步優化處理。通過對比水聲定位和GPS定位兩種實時定位軌跡,表明該水聲定位系統具有較好穩定性和可靠性。最后對水聲定位解算點進行了誤差分析,平均誤差小于0.3m,達到了試驗誤差要求。
2水聲定位原理
在潛艇自航模試驗中,為節省成本,降低布設傳感器難度,同時考慮到潛艇自航模下潛深度較淺,在其運動維度上深度距離相對平面距離可忽略不計,因此試驗要求平面二維定位即可。
目標點距已知點之間的距離主要依靠傳播信號從目標點發射到接收點接收之間的時間差進行測定,通過測量目標點距三個或更多個已知點之間的距離解算出目標點位置。進行目標二維定位時僅需要三個已知節點即可,三個已知參考節點的坐標分別為(x1,y1)、(x2,y2)、(x3,y3)。理想狀態下目標點(x0,y0)到三個已知節點的真實距離為(d1,d2,d3),三圓相交于一點,得到方程組:
(1)
化簡可得:
(2)
求解方程組可得:
AX=B
(3)
X=A-1B
(4)


實際環境中由于受外界環境干擾等影響,目標點到三點之間的距離存在一定誤差,因此通常情況下三圓相交往往存在多個交點,如圖1所示。

圖1 實際情況
式(3)修正為
AX+E=B
(5)
其中E為隨機測距誤差。
根據最小二乘估計原理:
(6)
求解上式可得:
(7)
3水聲定位系統的設計
3.1系統硬件組成及工作原理
為了能夠實時檢驗水聲定位系統的定位精度和跟蹤效果,選用同時裝有GPS定位和水聲發射換能器的水面船舶自航模型進行試驗。系統硬件組成如圖2所示。
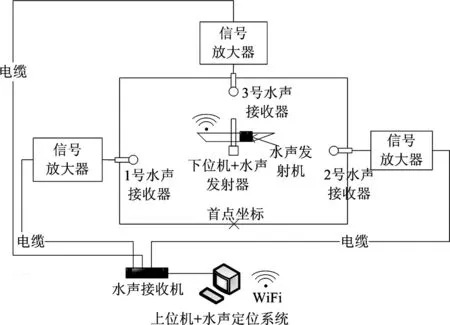
圖2 系統硬件組成示意圖
自航模距各水聲接收器之間的距離測定建立在水聲發射機與接收機之間啟動信號同步的基礎上的。以測量自航模距1號水聲接收器為例,水聲發射機的發射頻率為1Hz,水聲發射換能器在t0時刻發出聲波脈沖,固定在岸邊的1號水聲接收器在t0+Δt時刻接收到聲波脈沖后將聲信號轉換為電信號通過信號放大器發送至水聲接收機。水聲接收機將時間差Δt以數據幀格式發送至串口。
水聲定位系統同時讀取水聲接收機多個串口數據以獲得水聲發射換能器距各個接收器之間的距離。將時間差與聲速相乘即得到自航模距各水聲接收器的距離。
試驗開始前需要利用差分GPS測得水聲接收器固定坐標,在解算自航模位置時將測得的GPS坐標轉換為平面坐標。獲得三邊距離和三個已知節點位置根據式(7)計算得到自航模位置。
3.2系統軟件組成
水聲定位系統的軟件部分是基于LabVIEW13版本進行開發設計的,主要完成系統標定、多通道數據采集、數據實時處理、數據存儲和顯示等功能。在試驗開始前需要對水聲接收器延時誤差、實際水聲聲速等參數進行標定。程序設計流程框圖如圖3所示。
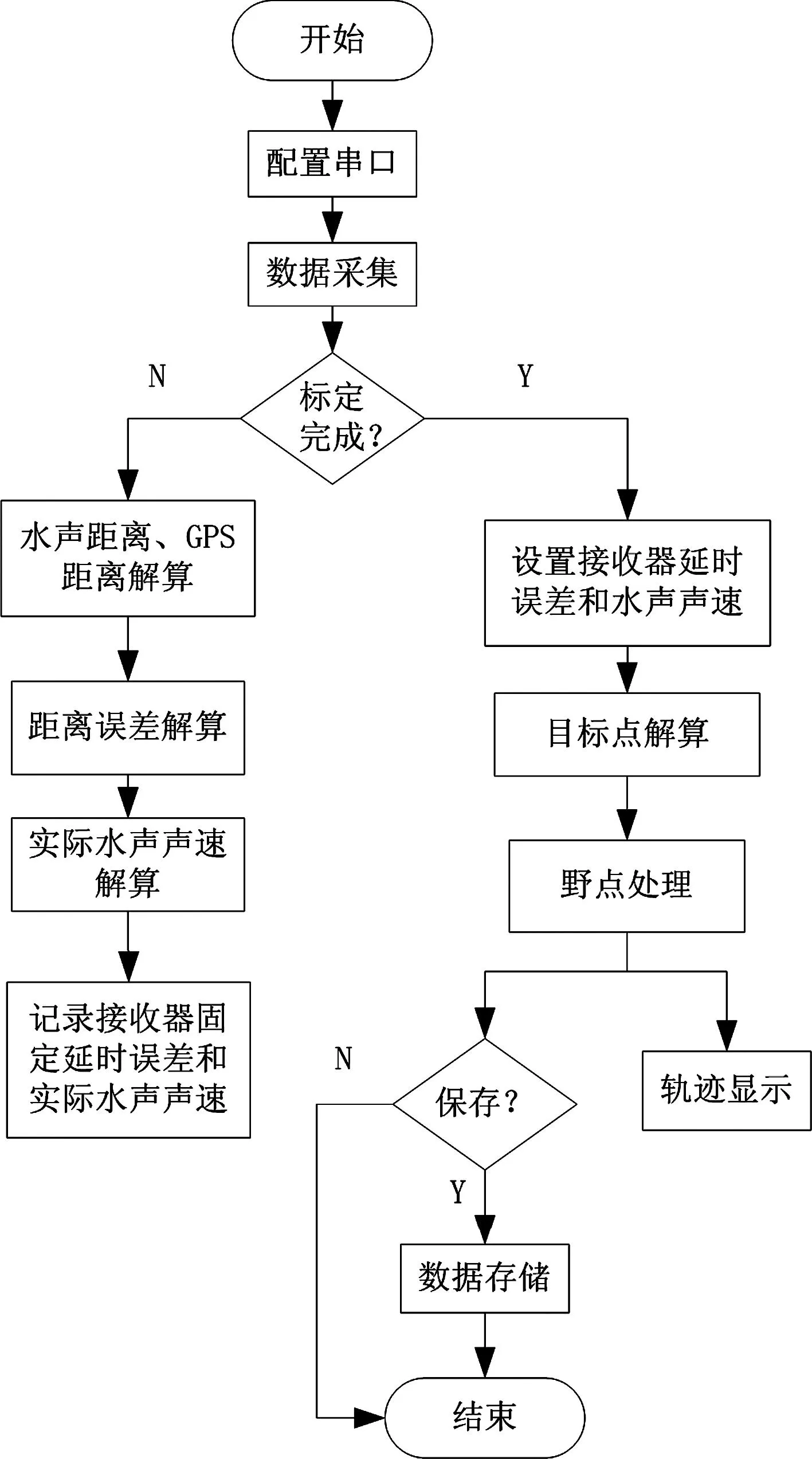
圖3 程序流程圖
在潛艇自航模下水前首先需要利用裝有GPS和水聲發射器的水面自航模對相關參數進行標定,標定原因詳見4.3節。利用預設聲速與數據采集到的時間差數據計算得到三邊水聲距離,然后計算同一周期內的GPS距離與水聲距離之間的偏差,同時利用GPS距離與時間差數據計算實際聲速值。分析距離誤差和實際聲速并記錄固定距離誤差和實際聲速值。
標定完成后,按照標定值設置接收器延時誤差和水聲聲速,解算出目標點后,對于滿足野值判定條件的坐標進行處理,詳細野值判定處理過程見4.2節。將處理后的目標點坐標以曲線形式顯示在主界面上,如需保存,則存儲三邊水聲距離、水聲目標點等信息。
4水聲定位系統實現及關鍵技術分析
水聲定位實驗在長為120m,寬63.6m的水池中進行。三個水聲接接收器平面坐標分別為(-50.04,101.56),(11.35,118.20),(-39.62,101.56)。根據實際情況聲速選擇為1450m/s。在常規情況下試驗結果如圖4所示。
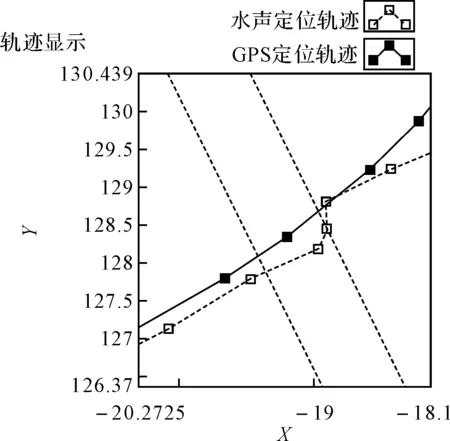
圖4 試驗航跡局部圖
觀察試驗航跡圖,水聲定位系統軌跡主要存在以下問題:
1) 軌跡存在“鋸齒”;
2) 存在明顯偏離定位軌跡的水聲定位點;
3) 水聲定位軌跡與GPS定位軌跡之間存在固定偏差。
如何處理這些問題是提高水聲定位精度的關鍵。
4.1多通道數據采集同步
“鋸齒”現象產生的主要是多串口數據讀取不同步造成的。常規情況下,若將程序循環等待時間設置為200ms,在1s周期內可多次讀取串口數據,而三個串口數據在同一周期內并非同時發生改變,因此在1s內可能產生解算出多個不同的點。將程序等待時間設置為1s后,可以消除鋸齒現象。但程序讀取串口時間仍然不確定,同樣存在數據不同步問題,如圖5所示。
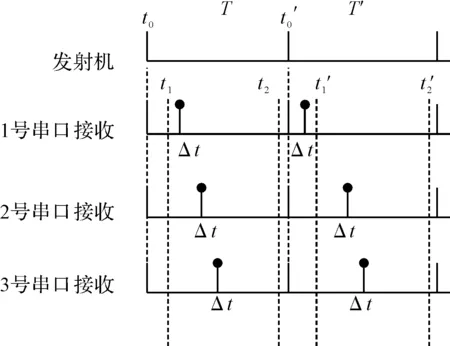
圖5 多通道數據采集同步示意圖
其中t0時刻為發射機和接收機啟動的整秒信號,發送周期為1s;Δt為串口收到的時間差;t1、t2為當前周期程序讀取串口時刻。

4.2“野點”處理
在實際工程環境中,由于外界環境干擾等問題可能產生較大測距誤差,這部分誤差不是解算方法造成的。如表1測量數據表所示,測量的2號距離和3號距離在第50s處出現較大偏差,導致解算點坐標與實際坐標偏差較大。這類異常點通常稱作“野點”。綜合試驗情況來看,“野點”出現的概率不高,但非常影響對目標狀態的實時觀測。因此,在數據處理過程中需要對這些“野點”進行判斷并予以剔除。

表1 測量數據表
如圖6所示,其中A、B兩點分別為t-2,t-1時刻測得的點,C點為t0時刻待測點。對于判斷解算點坐標是否屬于“野點”主要參考指標為解算點與上一次測量點之間的方向和距離偏差。

圖6 “野點”判斷示意圖
方向判斷:
(8)
(9)
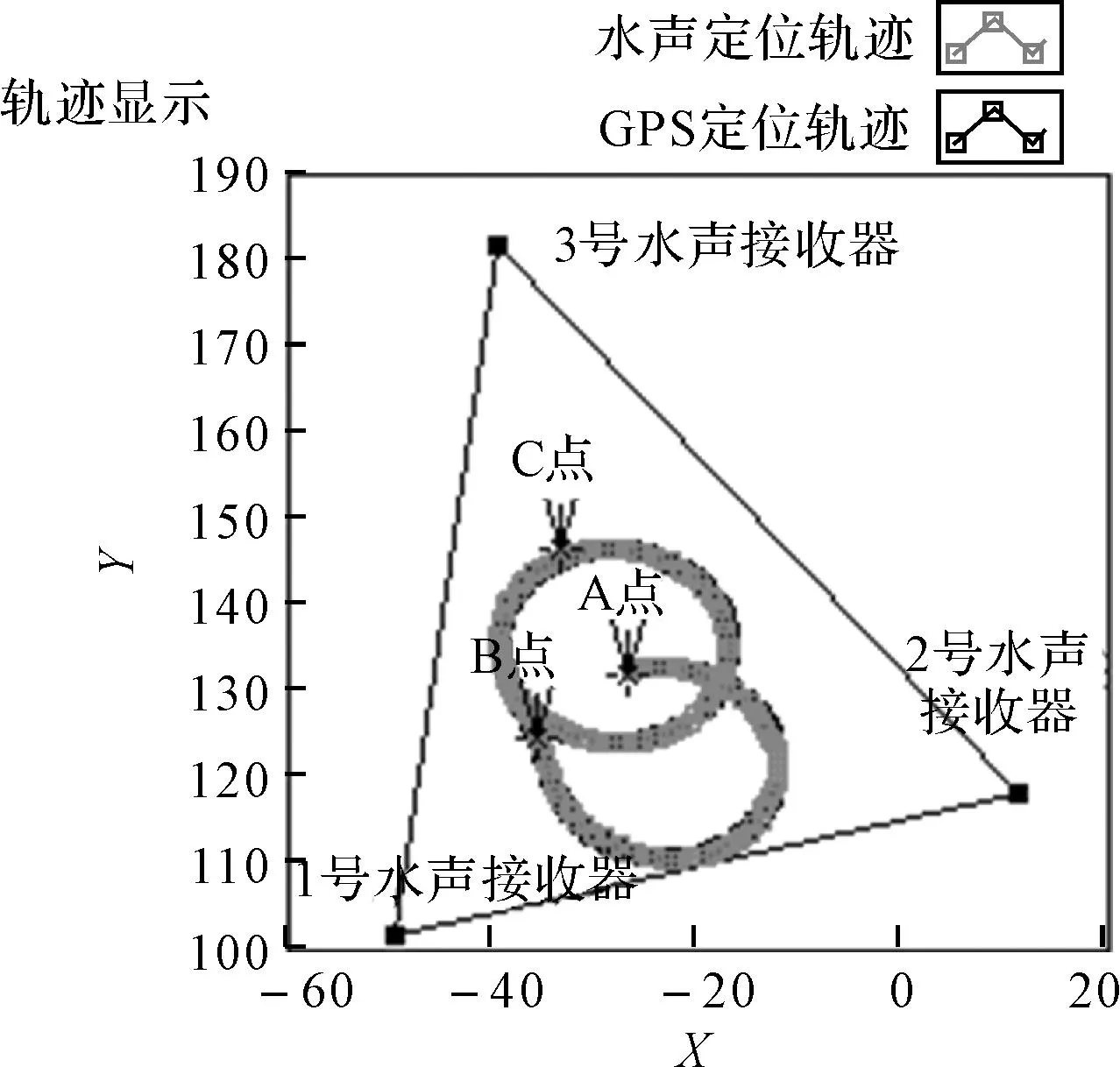
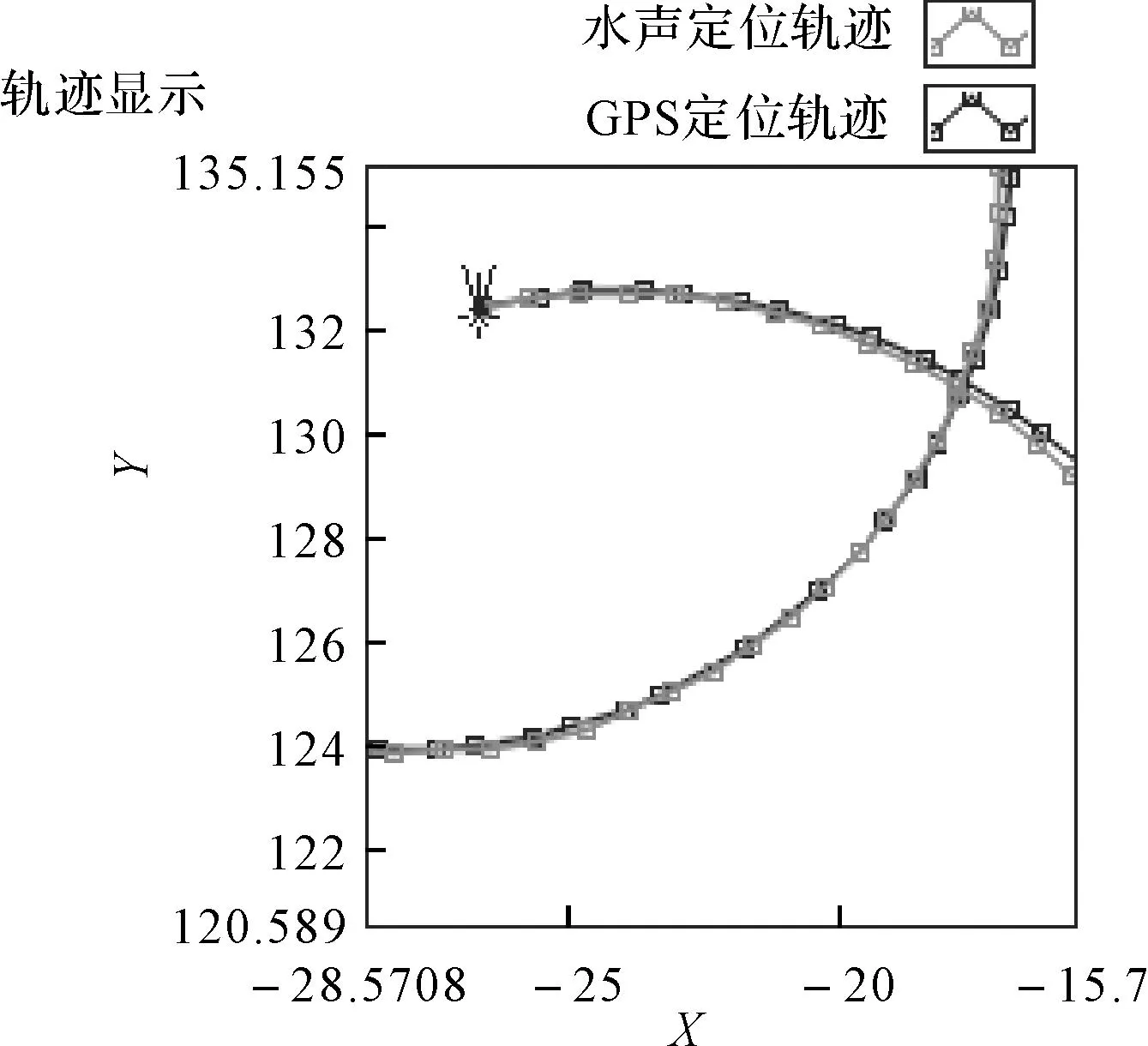
|θBC-θAB| (10) 其中rθ表示方向容忍偏差,其值一般根據目標點運動角速度而定。 若式(10)滿足,則表明方向合理。 距離判斷: |dAB-dBC| (11) 其中rd表示距離容忍偏差,其值一般根據目標運動速度而定。 若式(11)滿足,則表明距離合理。 若方向或距離任一偏差過大則認為該點為“野點”,刪除“野點”并以上一時刻坐標點作為該時刻坐標點。 4.3傳感器延時誤差標定 出現此類偏差的原因在于水聲接收器自身具有一定的延時誤差。以分析3號距離誤差數據為例,未對接收器進行延時誤差標定前,距離誤差如圖7所示。 圖7 距離誤差趨勢圖 從趨勢圖中可以看出距離誤差始終在1附近跳動,說明3號接收器有一定的延時誤差。在試驗開始前應根據距離誤差實時數據對水聲接收器延時標定。通過調節延時誤差使距離誤差在零值附近跳動。 4.4修正后結果 方向容忍偏差rθ=10°,距離容忍偏差rd=2m。1號接收器延時標定設置為-0.5;2號接收器延時標定設置為0;3號接收器延時標定設置為1。自航模試驗航跡如圖8所示。 圖8 試驗航跡圖 圖9 航跡局部圖 目標船由A點出發經過B點后繞C點后做回轉運動,總體運動軌跡為:A-B-C-B。對GPS點與水聲定位點之間的距離差進行分析,誤差曲線如圖10所示,平均距離誤差為0.2864m。 圖10 誤差分析 5結語 本文設計的水聲定位系統采用的是LabVIEW圖形化編程語言,操作簡單方便,擴展性較好,縮短了系統開發時間。同時解決了實際工程環境中的數據同步、“野點”處理等問題。結果滿足試驗要求。在綜合誤差中還存在一些較大誤差點,將在今后的研究中對這些誤差進一步分析以提高定位精度。在實際應用過程中可根據實際情況增加水聲接收節點,擴大試驗范圍。該水聲定位系統已成功應用到實際項目試驗過程中。 參 考 文 獻 [1] 陳東賓,肖昌潤,張文照.水聲式自航模同步定位系統研究及應用[J].船海工程,2011,40(6):194-19. [2] 王波,畢毅,李和平.水聲式自航模運動軌跡實時測量系統[J]. SHIP ENGINEERING,2003,25(2):53-55. [3] 周艷.基于RSSI測距的傳感器網絡定位算法研究[J].計算機科學,2009,36(4):119-121. [4] 王怡,付麗琴.基于多傳感器的水聲定位精度研究[J].計算機測量與控制,2009,17(2):363-367. [5] Yuh J. Design and control of autonomus underwater robots: a survey[J]. Autonomus Robots,2000(8):7-24. [6] 錢洪寶,孫大軍.水聲定位系統現狀[J].聲學技術,2011,30(3):389-391. [7] 董真杰,鄭琛瑤,張國龍.多傳感器數據融合提高水聲定位精度[J].現代電子技術,2014,37(18):127-129. [8] 李飛,李斌.水聲定位系統數據采集單元設計[J].聲學技術,2009,28(5):664-668. [9] 焦小濤,李建昌,門麗娟.兩種TDOA定位算法在水聲被動定位下的精度分析[J].電聲技術,2013,37(1):73-75. [10] 魏軍,陳志誠,曾斌.潛艇自航模控制系統設計[J].火力與指揮控制,2014,39(11):171-174. 中圖分類號TP399 DOI:10.3969/j.issn.1672-9730.2016.03.036 作者簡介:尚留賓,男,碩士研究生,研究方向:信息管理。魏軍,男,博士,副教授,研究方向:系統開發與系統集成。陳志誠,男,博士,講師,研究方向:信息管理。 收稿日期:2015年9月9日,修回日期:2015年10月22日
 猜你喜歡
現代電子技術(2016年22期)2016-12-26 12:36:15電子技術與軟件工程(2016年22期)2016-12-26 11:11:30現代電子技術(2016年22期)2016-12-26 09:44:35電子技術與軟件工程(2016年19期)2016-12-19 19:59:14電腦知識與技術(2016年27期)2016-12-15 20:42:01農業與技術(2016年15期)2016-11-09 17:43:03科技視界(2016年18期)2016-11-03 22:51:40中國科技博覽(2016年22期)2016-11-01 16:58:26軟件工程(2016年8期)2016-10-25 15:54:18軟件工程(2016年8期)2016-10-25 15:52:53
猜你喜歡
現代電子技術(2016年22期)2016-12-26 12:36:15電子技術與軟件工程(2016年22期)2016-12-26 11:11:30現代電子技術(2016年22期)2016-12-26 09:44:35電子技術與軟件工程(2016年19期)2016-12-19 19:59:14電腦知識與技術(2016年27期)2016-12-15 20:42:01農業與技術(2016年15期)2016-11-09 17:43:03科技視界(2016年18期)2016-11-03 22:51:40中國科技博覽(2016年22期)2016-11-01 16:58:26軟件工程(2016年8期)2016-10-25 15:54:18軟件工程(2016年8期)2016-10-25 15:52:53