離心式壓縮機(jī)轉(zhuǎn)子故障識(shí)別的EEMD-PCA方法研究
2016-04-15 11:40:38馬再超溫廣瑞張恒輝廖與禾
振動(dòng)與沖擊 2016年4期
馬再超, 溫廣瑞,2, 張恒輝, 廖與禾
(1.西安交通大學(xué) 機(jī)械結(jié)構(gòu)強(qiáng)度與振動(dòng)國(guó)家重點(diǎn)實(shí)驗(yàn)室,西安 710049; 2.新疆大學(xué) 機(jī)械工程學(xué)院,烏魯木齊 830047)
?
離心式壓縮機(jī)轉(zhuǎn)子故障識(shí)別的EEMD-PCA方法研究
馬再超1, 溫廣瑞1,2, 張恒輝1, 廖與禾1
(1.西安交通大學(xué) 機(jī)械結(jié)構(gòu)強(qiáng)度與振動(dòng)國(guó)家重點(diǎn)實(shí)驗(yàn)室,西安710049; 2.新疆大學(xué) 機(jī)械工程學(xué)院,烏魯木齊830047)
摘要:針對(duì)離心式壓縮機(jī)轉(zhuǎn)子系統(tǒng)振動(dòng)小,振動(dòng)信號(hào)具有非平穩(wěn)、非線性和伴隨噪聲干擾的特點(diǎn),提出一種總體平均經(jīng)驗(yàn)?zāi)J椒纸?Ensemble Empirical Mode Decomposition, EEMD)聯(lián)合主分量分析(Principal Component Analysis, PCA)的故障識(shí)別方法。該方法以相關(guān)分析結(jié)合傅里葉變換選擇基本模式分量(Intrinsic Mode Function, IMF)為基礎(chǔ),構(gòu)造了波動(dòng)變化性指標(biāo)以定量識(shí)別EEMD的噪聲幅值參數(shù);進(jìn)一步獲取各運(yùn)行狀態(tài)的14種時(shí)域振動(dòng)評(píng)價(jià)指標(biāo)并構(gòu)造標(biāo)準(zhǔn)化特征數(shù)據(jù)集后,采用PCA降維法得出不同類(lèi)型故障的振動(dòng)模式類(lèi)別。通過(guò)對(duì)離心式壓縮機(jī)轉(zhuǎn)子典型故障的振動(dòng)信號(hào)分析,其結(jié)果表明該方法能夠在解除信號(hào)非平穩(wěn)非線性干擾的基礎(chǔ)上,快速獨(dú)立地提取信號(hào)中的主要振動(dòng)模式,制定表征不同故障類(lèi)別的特征數(shù)據(jù)區(qū)域,從而有效提高了離心式壓縮機(jī)的故障識(shí)別能力。
關(guān)鍵詞:EEMD;PCA;波動(dòng)變化性指標(biāo);離心式壓縮機(jī)轉(zhuǎn)子
離心式壓縮機(jī),因具有結(jié)構(gòu)簡(jiǎn)單緊湊,尺寸小,重量輕,振動(dòng)小,運(yùn)行平穩(wěn)等特點(diǎn),并以其高轉(zhuǎn)速和高功率的高效運(yùn)行方式,不僅在航空航天、國(guó)防建設(shè)等高精尖行業(yè)得到廣泛應(yīng)用,也同時(shí)在石油化工、冶金等國(guó)民支柱產(chǎn)業(yè)中奠定了其作為動(dòng)力機(jī)械的基礎(chǔ)性作用。離心式壓縮機(jī)本質(zhì)上屬于旋轉(zhuǎn)機(jī)械范疇,轉(zhuǎn)子作為其核心部件容易出現(xiàn)各類(lèi)常見(jiàn)振動(dòng)故障,一旦發(fā)生故障,不但損耗壓縮機(jī)正常使用壽命,而且降低生產(chǎn)效率[1-4]。因此,快速準(zhǔn)確識(shí)別離心式壓縮機(jī)的轉(zhuǎn)子振動(dòng)狀態(tài)與故障形式則保障進(jìn)生產(chǎn)現(xiàn)場(chǎng)的安全穩(wěn)定。
離心式壓縮機(jī)轉(zhuǎn)子振動(dòng)信號(hào)往往表現(xiàn)出能量微弱并伴隨非線性、非平穩(wěn)現(xiàn)象及噪聲干擾等特點(diǎn)[5-6],這類(lèi)問(wèn)題是學(xué)者們長(zhǎng)期關(guān)注并期待解決的焦點(diǎn)。針對(duì)信號(hào)的非平穩(wěn)非線性現(xiàn)象,Huang等[7]提出經(jīng)驗(yàn)?zāi)J椒纸猓醪浇⒘艘运矔r(shí)頻率度量信號(hào)交變特性,以基本模式分量表達(dá)信號(hào)成分的時(shí)頻分析方法體系[8],并迅速在機(jī)械設(shè)備故障診斷領(lǐng)域得到應(yīng)用研究。Yu等[9]將EMD和包絡(luò)分析結(jié)合用于滾動(dòng)軸承故障診斷;Gai[10]采用EMD分析轉(zhuǎn)子起車(chē)信號(hào)并繪制Bode圖;Liu等[11]將基于B樣條曲線的EMD和Hilbert譜用于齒輪箱故障診斷。然而,因噪聲干擾等異常事件存在,易導(dǎo)致模式混疊問(wèn)題[12-15]。Wu等[16]提出總體平均經(jīng)驗(yàn)?zāi)J椒纸猓瑢自肼曒o助經(jīng)驗(yàn)?zāi)J椒纸猓行б种屏四J交殳B現(xiàn)象。該方法也很快在旋轉(zhuǎn)機(jī)械故障診斷領(lǐng)域得到應(yīng)用研究,曹沖鋒等[17]采用EEMD研究了轉(zhuǎn)子啟動(dòng)過(guò)程中的非平穩(wěn)信號(hào)降噪問(wèn)題;Yu等[18]采用EEMD研究了轉(zhuǎn)子局部碰摩,并與EMD的效果進(jìn)行了對(duì)比;Lei等[19-20]將EEMD用于轉(zhuǎn)子沖擊性碰摩故障診斷研究,并研究了EEMD的加噪方法;陳仁祥等[21]針對(duì)轉(zhuǎn)子振動(dòng)信號(hào)的降噪,研究了EEMD的分量選擇和加噪次數(shù)問(wèn)題;Zhang等[22]將形態(tài)濾波、EEMD、樣本熵和灰關(guān)聯(lián)分析結(jié)合研究了轉(zhuǎn)子常見(jiàn)故障的分類(lèi)。以上關(guān)于轉(zhuǎn)子振動(dòng)模式提取的研究都取得一定成績(jī),但現(xiàn)場(chǎng)實(shí)際中面臨的非線性、非平穩(wěn)性和噪聲干擾時(shí),EEMD的分析結(jié)果仍然存在模式混疊現(xiàn)象,影響了快速并準(zhǔn)確區(qū)分故障的需求,其主要原因在于噪聲幅值參數(shù)的定量選取時(shí)至今日依然難以解決。另外,由Broomhead等[23]提出的主分量分析,其以最大化表征數(shù)據(jù)集的方差特性[24]表現(xiàn)出高效性,但其線性本質(zhì)難以解決非線性因素的干擾。因此,若能構(gòu)造某種指標(biāo)定量選取噪聲幅值參數(shù),進(jìn)一步解決EEMD的模式混疊現(xiàn)象,并通過(guò)合理的途徑將EEMD與PCA結(jié)合使用,以解除信號(hào)非平穩(wěn)非線性干擾為前提,則有望采用PCA這類(lèi)經(jīng)典線性方法的優(yōu)勢(shì)實(shí)現(xiàn)離心式壓縮機(jī)轉(zhuǎn)子常見(jiàn)故障的快速準(zhǔn)確識(shí)別。
基于以上分析,本研究以仿真離心式壓縮機(jī)轉(zhuǎn)子系統(tǒng)為研究對(duì)象,對(duì)基于EEMD的轉(zhuǎn)子振動(dòng)模式提取和基于PCA的轉(zhuǎn)子故障識(shí)別的聯(lián)合方法進(jìn)行了探討,以期為離心式壓縮機(jī)常見(jiàn)典型故障的識(shí)別提供參考。
1基本概念簡(jiǎn)介
1.1總體平均經(jīng)驗(yàn)?zāi)J椒纸?EEMD)
EEMD的核心思想是利用白噪聲頻譜均勻分布的統(tǒng)計(jì)特性,為分析信號(hào)提供均勻分布的分解尺度;同時(shí)利用白噪聲的零均值特點(diǎn),經(jīng)多次平均后則能抑制噪聲的影響,從而有效降低了模式混疊現(xiàn)象,其本質(zhì)是多次EMD的平均。因此,EEMD的算法步驟[16]可歸納如下:
步驟1在原始信號(hào)x(t)中分別加入N次均值為0,幅值標(biāo)準(zhǔn)差為常量的高斯白噪聲ni(t),其式為
xi(t)=x(t)+ni(t)
(1)
式中,i=1,2,…,N。
步驟2對(duì)每個(gè)xi(t)分別進(jìn)行EMD分解,得到Ki個(gè)IMF分量和余項(xiàng)ri(t),為
(2)
式中,Cij(t)為第i次加入高斯白噪聲信號(hào)分解得到的第j個(gè)IMF,j=1,2,…,Ki。
步驟3將得出的IMF進(jìn)行總體平均運(yùn)算,抑制多次加入高斯白噪聲的影響,得到真實(shí)的IMF和余項(xiàng)r(t),為
(3)
(4)
式中,Cj(t)為原始信號(hào)分解后得到的第i個(gè)IMF。
步驟4得出K個(gè)IMF分量和一個(gè)余項(xiàng)r(t),為
(5)
1.2主分量分析(PCA)
PCA是一種通過(guò)線性變換進(jìn)行特征壓縮,用盡可能小的維數(shù)最大程度地表征原始信息的方法。實(shí)現(xiàn)該方法的關(guān)鍵步驟是求解能夠最大化表征原始數(shù)據(jù)集各維度方差特性的投影方向,其計(jì)算方法[22]為
Cυ=λυ
(6)
式中,C是原始數(shù)據(jù)集的協(xié)方差矩陣,λ是矩陣C的特征值,ν是與λ對(duì)應(yīng)的特征向量。用最大化方差準(zhǔn)則得到矩陣C的N個(gè)降序排列特征值λi(i=1,2,…,N)及對(duì)應(yīng)的特征向量νi。從中選擇對(duì)應(yīng)特征值較大的若干投影方向,則X對(duì)應(yīng)的輸出Y計(jì)算方法為
Y=X·γ
(7)
1.3相關(guān)分析(CA)
為度量信號(hào)與信號(hào)之間取值隨自變量前后變化的相似性,信號(hào)x(t)與y(t)的相關(guān)函數(shù)[8]定義為
(8)
式中:T為信號(hào)x(t)和y(t)的觀測(cè)時(shí)間。Rxy(τ)描述了x(t)和y(t±τ)之間的相關(guān)性。實(shí)際中常用標(biāo)準(zhǔn)化的相關(guān)系數(shù)(相關(guān)函數(shù))為
(9)
式中,Cxy(τ)為信號(hào)x(t)和y(t)的互協(xié)方差函數(shù),σx為信號(hào)x(t)的標(biāo)準(zhǔn)差,σy為信號(hào)y(t)的標(biāo)準(zhǔn)差。
2離心式壓縮機(jī)轉(zhuǎn)子典型故障識(shí)別的EEMD-PCA方法
2.1轉(zhuǎn)子振動(dòng)模式提取
EEMD的目標(biāo)是在對(duì)噪聲解耦的基礎(chǔ)上,將信號(hào)分解為頻率由高到低排列的IMF分量和一個(gè)殘余項(xiàng)。從轉(zhuǎn)子振動(dòng)分析的工程經(jīng)驗(yàn)角度看,信號(hào)經(jīng)EEMD分解得到的高頻區(qū)域IMF分量為隨機(jī)噪聲,而對(duì)于頻率過(guò)低區(qū)域的IMF分量則可能為趨勢(shì)項(xiàng)、虛假分量或者殘余項(xiàng),將這些無(wú)效分量去除,就能得到具有表征轉(zhuǎn)子振動(dòng)模式特點(diǎn)的IMF分量,既可用于單獨(dú)分析,也可用于信號(hào)重構(gòu)。對(duì)于離心式壓縮機(jī)的特殊工況條件,使用EEMD得到的IMF分量仍然存在一定程度的頻率混疊現(xiàn)象,因此其分量選擇旨在最大化保留轉(zhuǎn)子的主要振動(dòng)模式。
針對(duì)轉(zhuǎn)子振動(dòng)模式表現(xiàn)出強(qiáng)周期性,采用FFT能夠發(fā)現(xiàn)在某些頻率處具有強(qiáng)周期性特點(diǎn)的IMF分量,也能用于檢測(cè)分量之間是否具有相同頻率成分,從而定性判斷模式混疊的程度。因此,基于FFT的轉(zhuǎn)子振動(dòng)模式提取步驟可歸納如下:
步驟1對(duì)各IMF分量進(jìn)行FFT,得到各分量頻譜圖;
步驟2對(duì)比各頻譜,找出具有強(qiáng)周期性的分量備選;
步驟3對(duì)比各頻譜之間有無(wú)相同頻率成分,定性判斷模式混疊程度。
通過(guò)上述FFT的思路能夠?qū)ふ抑芷谛暂^強(qiáng)的IMF分量,能判斷噪聲IMF分量,但卻無(wú)法去除趨勢(shì)項(xiàng)和虛假分量。采用相關(guān)分析的思路能夠表現(xiàn)出原始信號(hào)與IMF分量之間的關(guān)系,也能表現(xiàn)各IMF分量之間的關(guān)系,有助于去除無(wú)效的IMF分量。因此,基于相關(guān)分析的轉(zhuǎn)子振動(dòng)模式提取步驟可歸納如下:
步驟1計(jì)算各IMF分量與原始信號(hào)的相關(guān)系數(shù),找出與原始信號(hào)最相關(guān)的若干分量;
步驟2計(jì)算各IMF分量之間的相關(guān)系數(shù),度量分量之間的模式混疊程度;
步驟3定性剔除與原始信號(hào)相關(guān)性較小的IMF分量。
2.2EEMD的參數(shù)確定
文獻(xiàn)[16]指出白噪聲對(duì)分析信號(hào)的影響遵循如式(10)所示的統(tǒng)計(jì)規(guī)律,即
(10)
式中:εn是原始信號(hào)與重構(gòu)結(jié)果的偏差,ε是白噪聲幅值,N是加噪次數(shù)。
由式(10)可以看出信號(hào)分解精度與噪聲幅值ε成正比,與加噪次數(shù)N的開(kāi)方成反比。為保證分解精度,當(dāng)ε過(guò)小時(shí),難以引起信號(hào)局部極值點(diǎn)變化;而當(dāng)N過(guò)大時(shí),將增加算法的復(fù)雜程度。因此,文獻(xiàn)[16]根據(jù)加噪實(shí)驗(yàn)推薦一般情況下ε取分析信號(hào)標(biāo)準(zhǔn)差的0.2倍。如果信號(hào)主要表現(xiàn)為高頻特性,則ε可取更小值;如果信號(hào)主要表現(xiàn)為低頻特性,則ε可取更大值。
離心式壓縮機(jī)轉(zhuǎn)子振動(dòng)信號(hào)的常見(jiàn)狀態(tài)主要集中在基頻、分頻及四倍基頻以內(nèi)的整數(shù)頻率范圍內(nèi),屬于低頻信號(hào)。因此,ε可以取適當(dāng)大于分析信號(hào)標(biāo)準(zhǔn)差的0.2倍,并結(jié)合前述FFT與相關(guān)系數(shù)度量分量模式混疊程度的方式來(lái)適當(dāng)修正ε的取值。然而,該方法仍然屬于定性判斷范疇。由于信號(hào)加噪將導(dǎo)致信號(hào)的紊亂程度提高和極值點(diǎn)改變,在提高IMF之間的正交性條件下,同時(shí)需要保證重構(gòu)信號(hào)相對(duì)原始信號(hào)的畸變較小。因此,研究中構(gòu)造了波動(dòng)變化性指標(biāo)(Fluctuant Variation Index)如式(11)所示,用于度量原始信號(hào)與重構(gòu)信號(hào)對(duì)應(yīng)極值點(diǎn)的波動(dòng)性變化情況,進(jìn)而定量判斷噪聲幅值參數(shù)的取值是否合適。由式(11)可見(jiàn),當(dāng)FV取較小值時(shí),則認(rèn)為原始信號(hào)經(jīng)EEMD分解和重構(gòu)后的波形畸變較小,其對(duì)應(yīng)的噪聲幅值參數(shù)即為最佳值。
(11)
式中,xp為原始信號(hào)峰值,xrms為原始信號(hào)均方幅值,yp為重構(gòu)信號(hào)峰值,yrms為重構(gòu)信號(hào)均方幅值。
另外,加噪次數(shù)N可以按照文獻(xiàn)[16]取100以內(nèi)即可,文獻(xiàn)[21]認(rèn)為根據(jù)轉(zhuǎn)子振動(dòng)信號(hào)的特點(diǎn)取較小的N即可獲得較好的分解效果。
2.3典型故障的PCA分類(lèi)
PCA通過(guò)最大化表征數(shù)據(jù)集方差的正交投影變換描述數(shù)據(jù)集。因此,具有較高線性度的不同類(lèi)別數(shù)據(jù)集將盡可能投影至正交坐標(biāo)系空間的不同位置。對(duì)于前述采用定量方式確定噪聲幅值參數(shù)的EEMD,其提取的轉(zhuǎn)子振動(dòng)模式分量達(dá)到約束條件下的最佳。因此,可通過(guò)下述規(guī)劃的步驟將轉(zhuǎn)子不同運(yùn)行狀態(tài)定量刻畫(huà)于正交坐標(biāo)系空間的某些區(qū)域:
步驟1將選取的IMF重構(gòu)轉(zhuǎn)子振動(dòng)信號(hào);
步驟2計(jì)算轉(zhuǎn)子振動(dòng)信號(hào)的均值、方差、標(biāo)準(zhǔn)差、偏斜度、峭度、峰峰值、均方幅值、平均幅值、方根幅值和峰值十種有量綱指標(biāo),以及波形指標(biāo)、峰值指標(biāo)、脈沖指標(biāo)、裕度指標(biāo)四種無(wú)量綱指標(biāo)[8];
步驟3將幾種典型故障的特征評(píng)價(jià)指標(biāo)組合形成特征數(shù)據(jù)集[25];
步驟4將特征數(shù)據(jù)集進(jìn)行PCA分析并選取主要分量,實(shí)現(xiàn)可視化操作。
2.4離心式壓縮機(jī)轉(zhuǎn)子典型故障識(shí)別的流程設(shè)計(jì)
根據(jù)2.1~2.3闡述的離心式壓縮機(jī)轉(zhuǎn)子典型故障識(shí)別研究方法,歸納出其總體流程框架如圖1所示。
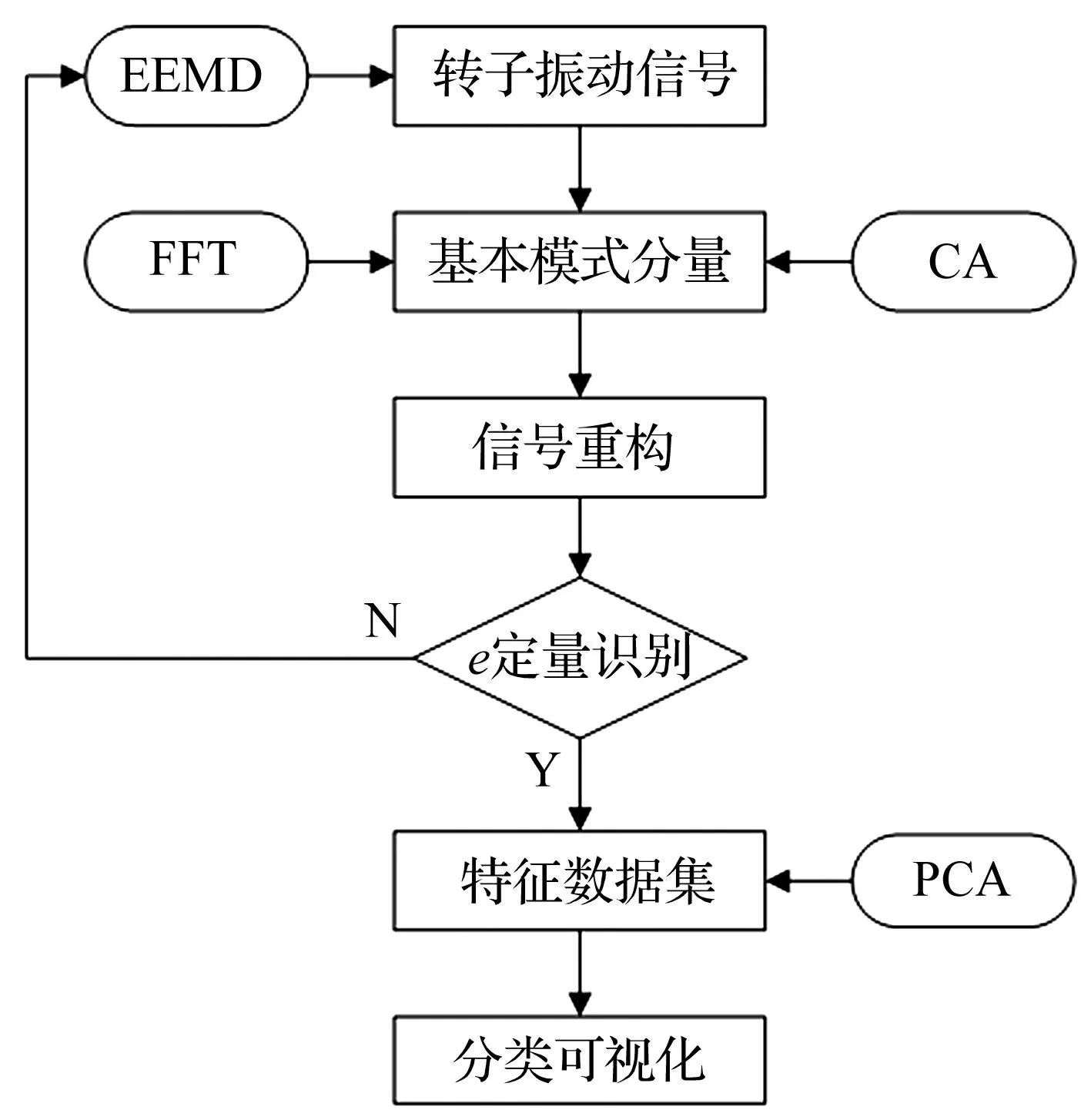
圖1 離心式壓縮機(jī)轉(zhuǎn)子典型故障識(shí)別流程Fig.1 Typical faults identification flow of rotor systemin centrifugal compressor
由圖1所示流程可歸納出離心式壓縮機(jī)轉(zhuǎn)子典型故障識(shí)別的具體步驟如下:
步驟1設(shè)置EEMD初始參數(shù),對(duì)轉(zhuǎn)子振動(dòng)信號(hào)進(jìn)行EEMD分析,得到IMF;
步驟2對(duì)IMF進(jìn)行FFT和CA分析,選擇IMF并重構(gòu)信號(hào);
步驟3定量識(shí)別噪聲幅值參數(shù)的優(yōu)越性;
步驟4重復(fù)步驟1至步驟3直到滿足終止條件,得到最佳IMF的重構(gòu)信號(hào);
步驟5對(duì)重構(gòu)信號(hào)提取時(shí)域14種特征指標(biāo),組合形成特征數(shù)據(jù)集;
步驟6對(duì)特征數(shù)據(jù)集標(biāo)準(zhǔn)化處理后進(jìn)行PCA分析,得到分類(lèi)可視化結(jié)果。
3應(yīng)用情況分析
本研究在離心式壓縮機(jī)轉(zhuǎn)子實(shí)驗(yàn)臺(tái)上模擬了不平衡,不對(duì)中和松動(dòng)故障。轉(zhuǎn)子實(shí)驗(yàn)臺(tái)由轉(zhuǎn)子系統(tǒng)和振動(dòng)測(cè)試系統(tǒng)組成,如圖2所示。轉(zhuǎn)子系統(tǒng)包括轉(zhuǎn)子,質(zhì)量盤(pán),驅(qū)動(dòng)電機(jī),軸承架和基座;振動(dòng)測(cè)試系統(tǒng)包括六組位移傳感器,數(shù)據(jù)采集模塊和上位機(jī)。其中的1~4號(hào)傳感器以45°和135°方向放至并分為兩組用于采集轉(zhuǎn)子振動(dòng)信號(hào);5和6號(hào)傳感器分別用于測(cè)量相位和獲取轉(zhuǎn)速。
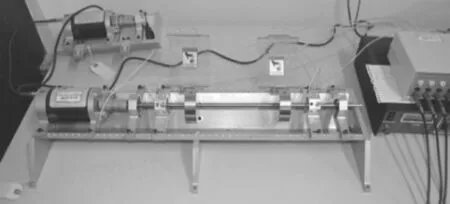
圖2 轉(zhuǎn)子實(shí)驗(yàn)臺(tái)結(jié)構(gòu)Fig.2 Structure of rotor test bench
使用上述轉(zhuǎn)子實(shí)驗(yàn)臺(tái)模擬故障并采集轉(zhuǎn)子振動(dòng)信號(hào)。實(shí)驗(yàn)中,采樣頻率設(shè)置為2 048 Hz,采樣長(zhǎng)度設(shè)置為2 048,電機(jī)轉(zhuǎn)速設(shè)置為4 000 r/min。以不對(duì)中運(yùn)行狀態(tài)為例,其振動(dòng)信號(hào)及其頻譜分別如圖3和4所示。
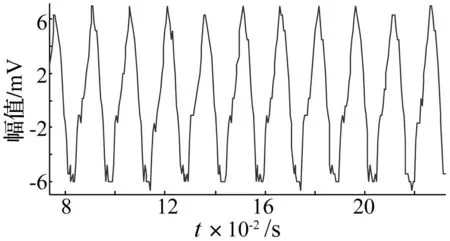
圖3 轉(zhuǎn)子不對(duì)中振動(dòng)信號(hào)Fig.3 Rotor vibration signal with misalignment
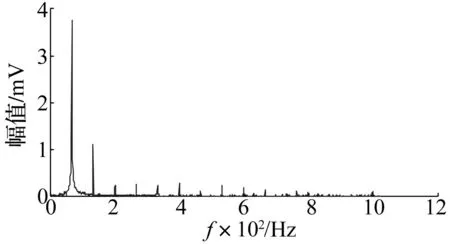
圖4 轉(zhuǎn)子不對(duì)中振動(dòng)信號(hào)頻譜Fig.4 Rotor vibration signal spectrum with misalignment
從轉(zhuǎn)子振動(dòng)信號(hào)及頻譜可以看出,基頻為主導(dǎo)且存在二倍頻,表明此時(shí)轉(zhuǎn)子以不對(duì)中故障運(yùn)行。依據(jù)2.4歸納的轉(zhuǎn)子系統(tǒng)典型故障識(shí)別流程,計(jì)算信號(hào)的標(biāo)準(zhǔn)差為4.26。因此設(shè)置初始參數(shù)ε取0.85,N=100,對(duì)信號(hào)進(jìn)行EEMD分析,得到的IMF如圖5所示。

圖5 不對(duì)中振動(dòng)信號(hào)各IMF(ε=0.85)Fig.5 IMFs of vibration signal with misalignment(ε=0.85)
由圖5可以看出,信號(hào)的主要振動(dòng)模式集中于IMF3和IMF4。因此,對(duì)前六個(gè)IMF分量進(jìn)行FFT,得到各IMF分量的頻譜如圖6所示。
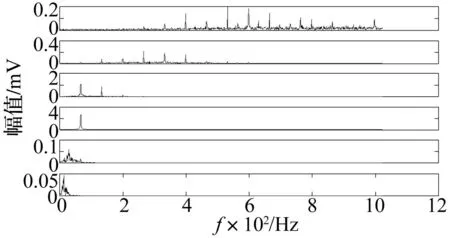
圖6 各IMF頻譜(ε=0.85)Fig.6 Spectrum of IMFs(ε=0.85)
根據(jù)圖6頻譜可以看出,IMF1和IMF2具有寬頻特性,幅值較小,且主要集中在高頻處,可以判斷為噪聲,不予選擇;IMF3和IMF4都包含了信號(hào)的基頻成分,存在模式混疊現(xiàn)象,予以選擇;而IMF5和IMF6表現(xiàn)出低頻噪聲特性,幅值微弱,不予選擇。因此,計(jì)算各IMF分量與原始信號(hào)的相關(guān)系數(shù)如表1所示。

表1 IMF與信號(hào)相關(guān)系數(shù)(ε=0.85)
由表1可以看出,IMF1和IMF2與原始信號(hào)表現(xiàn)出不相關(guān)性,可以斷定為高頻噪聲,不予選擇;IMF3和IMF4與原始信號(hào)表現(xiàn)出很強(qiáng)的相關(guān)性,各自代表了一部分振動(dòng)模式,予以選擇;IMF5和IMF6與原始信號(hào)表現(xiàn)出不相關(guān)性,判斷為低頻噪聲,不予選擇。進(jìn)一步計(jì)算IMF3和IMF4之間的相關(guān)系數(shù)為0.874 3。因此可以看出,IMF3和IMF4之間相關(guān)性較大,存在模式混疊。因此將IMF3和IMF4用于信號(hào)重構(gòu),得到重構(gòu)信號(hào)及其頻譜如圖7和圖8所示。
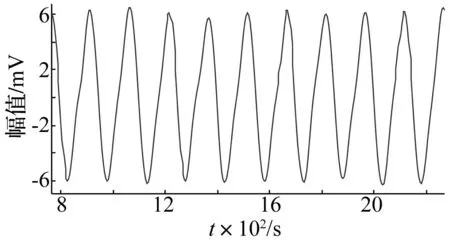
圖7 轉(zhuǎn)子不對(duì)中重構(gòu)信號(hào)(ε=0.85)Fig.7 Reconstruction signal of rotor with misalignment(ε=0.85)
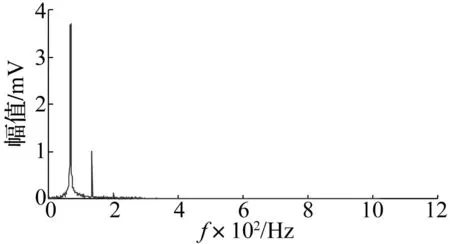
圖8 轉(zhuǎn)子不對(duì)中重構(gòu)信號(hào)頻譜(ε=0.85)Fig.8 Reconstruction signal spectrum of rotor with misalignment(ε=0.85)
由圖7和圖8可以看出,轉(zhuǎn)子不對(duì)中振動(dòng)模式基本提取出,高頻噪聲得到抑制但伴隨微弱低頻噪聲且IMF分量存在模式混疊現(xiàn)象。因此,根據(jù)轉(zhuǎn)子振動(dòng)頻率主要表現(xiàn)為低頻,應(yīng)取更大ε的原則,調(diào)整ε取2.0,重新進(jìn)行不對(duì)中信號(hào)的EEMD分析,觀察各IMF及其頻譜如圖9和圖10所示。
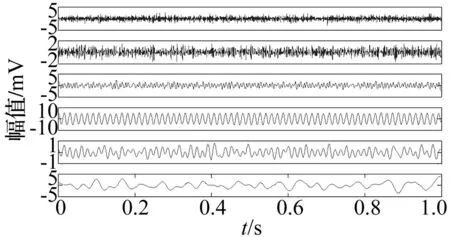
圖9 不對(duì)中振動(dòng)信號(hào)各IMF(ε=2.0)Fig.9 IMFs of vibration signal with misalignment(ε=2.0)
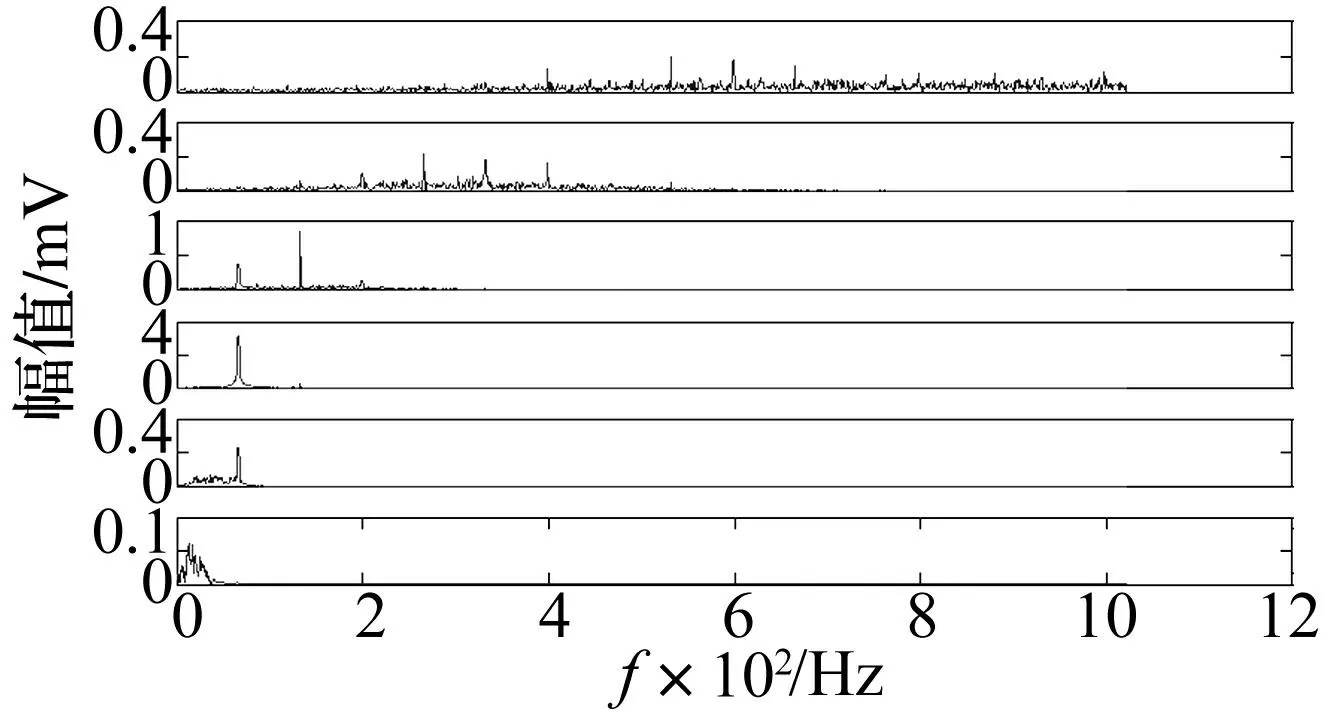
圖10 各IMF頻譜(ε=2.0)Fig.10 Spectrum of IMFs(ε=2.0)
分別對(duì)比圖5和圖9以及圖6和圖10可以看出,IMF3表現(xiàn)為二倍頻并伴隨有輕微一倍頻,而IMF4主要表現(xiàn)為一倍頻,幾乎沒(méi)有二倍頻成分,而IMF5表現(xiàn)出輕微的一倍頻且有微弱的低頻噪聲存在,可見(jiàn)模式混疊現(xiàn)象得到改善。進(jìn)一步做出前六個(gè)IMF與原始信號(hào)的相關(guān)系數(shù)以及各IMF之間的相關(guān)系數(shù),分別列于表2和表3所示。

表2 IMF與信號(hào)相關(guān)系數(shù)(ε=2.0)

表3 IMF間相關(guān)系數(shù)(ε=2.0)
由表2可以看出,IMF1和IMF2與原始信號(hào)表現(xiàn)出不相關(guān)性,為高頻噪聲,不予選擇;IMF3、IMF4和IMF5與原始信號(hào)表現(xiàn)出較強(qiáng)的相關(guān)性,各自代表了一部分振動(dòng)模式,予以選擇;IMF6與原始信號(hào)表現(xiàn)出不相關(guān)性。由表3可以看出,IMF3和IMF4有部分相關(guān)性,原因在于IMF3存在微弱基頻成分,可見(jiàn)模式混疊的得到改善;IMF3和IMF5的微弱相關(guān)性來(lái)源于微弱的基頻成分;IMF4和IMF5的強(qiáng)相關(guān)性來(lái)源于主導(dǎo)的基頻成分。因此,將IMF3、IMF4和IMF5用于信號(hào)重構(gòu),得到重構(gòu)信號(hào)及其頻譜如圖11和圖12所示。
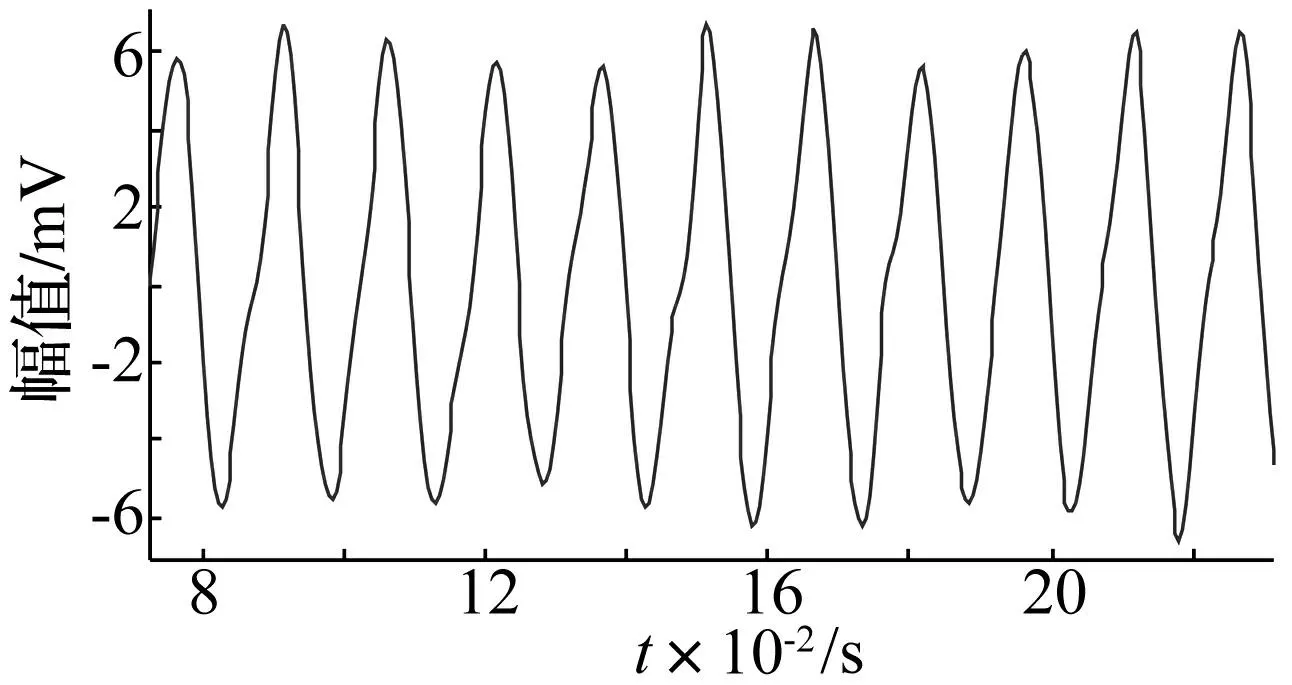
圖11 轉(zhuǎn)子不對(duì)中重構(gòu)信號(hào)(ε=2.0)Fig.11 Reconstruction signal of rotor with misalignment(ε=2.0)
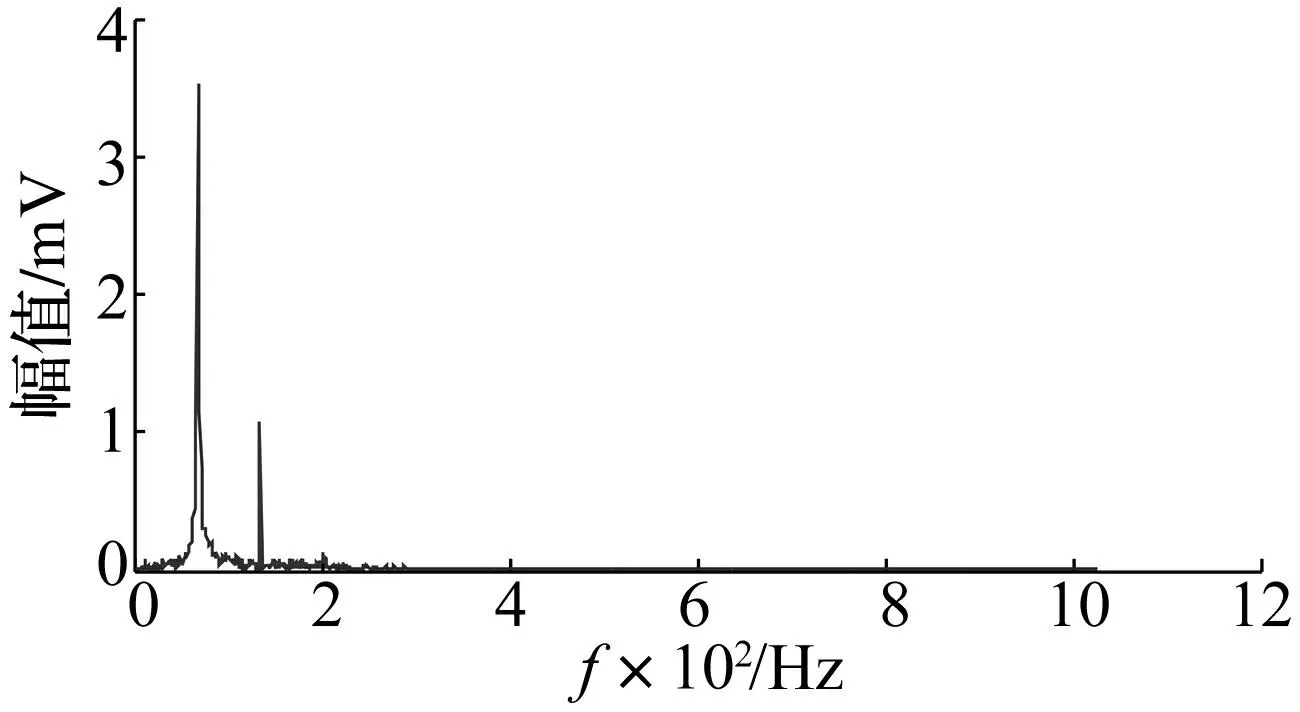
圖12 轉(zhuǎn)子不對(duì)中重構(gòu)信號(hào)頻譜(ε=2.0)Fig.12 Reconstruction signal spectrum of rotor with misalignment(ε=2.0)
對(duì)比圖11的重構(gòu)信號(hào)全貌和圖7的細(xì)化結(jié)構(gòu)可以看出,當(dāng)ε取2.0時(shí),重構(gòu)信號(hào)的波動(dòng)性較大,主要原因在于噪聲幅值過(guò)大。而頻譜并無(wú)明顯差異。因此,可以通過(guò)FFT結(jié)合相關(guān)分析的方式逐步迭代判斷ε取值,并在迭代過(guò)程中不斷計(jì)算重構(gòu)信號(hào)的波動(dòng)變化規(guī)律,從而在抑制模式混疊的基礎(chǔ)上,保證了重構(gòu)信號(hào)的小波動(dòng)性,得到的IMF分量具有更佳明確的單一振動(dòng)模式含義。此時(shí),在ε取0.85~2.0的范圍之間進(jìn)行迭代搜索,得到選取的IMF3和IMF4正交性變化規(guī)律及重構(gòu)信號(hào)波動(dòng)性變化規(guī)律分別如圖13和14所示。
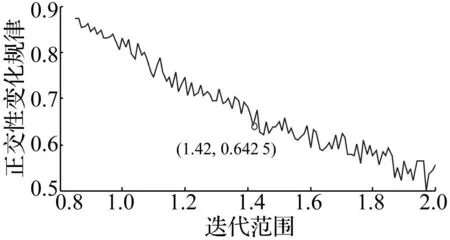
圖13 選定IMF的正交性變化規(guī)律Fig.13 Orthogonality variation rule of selected IMFs
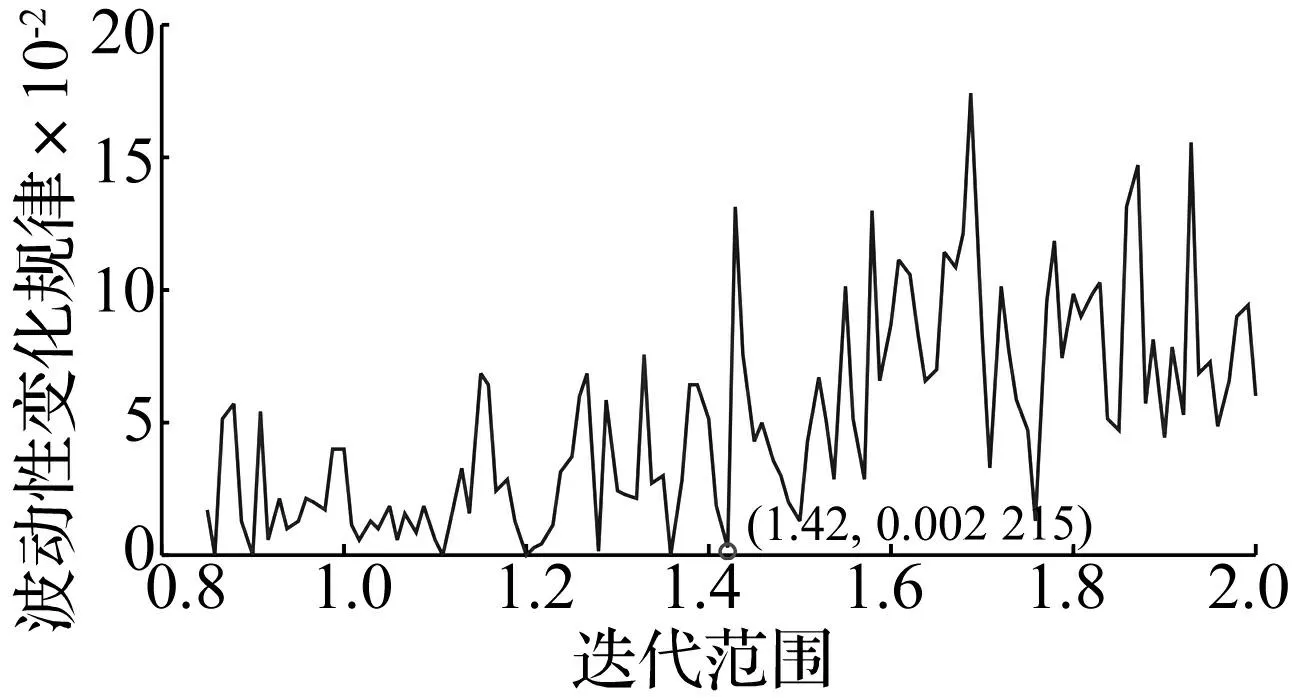
圖14 重構(gòu)信號(hào)波動(dòng)性變化規(guī)律Fig.14 Fluctuant variation rule of reconstruction signal
從選定IMF的正交性變化規(guī)律可以看出,其正交性取值總體表現(xiàn)出隨著噪聲幅值參數(shù)增加而呈現(xiàn)波動(dòng)線性下降的趨勢(shì),這符合信號(hào)噪聲加強(qiáng)使得信號(hào)間正交性提高的規(guī)律。進(jìn)一步對(duì)應(yīng)觀察重構(gòu)信號(hào)波動(dòng)性變化規(guī)律,以橫坐標(biāo)1.40處為分界線,左側(cè)的波動(dòng)存在接近零值的收斂點(diǎn);而右側(cè)除紅圈標(biāo)記的1.42處外,找不出能夠收斂至接近零值的收斂點(diǎn),且有波動(dòng)不斷變大的趨勢(shì);超出噪聲幅值參數(shù)取值2.0的部分已不符合文獻(xiàn)[16]給出的選取條件。因此,紅圈標(biāo)記的1.42處是圖中反映的臨界值,而該點(diǎn)也正好與正交性波動(dòng)變化規(guī)律圖中紅圈標(biāo)記的1.42極值點(diǎn)處相對(duì)應(yīng)。此時(shí),可以判定當(dāng)ε取1.42時(shí),分量正交性得到保證且重構(gòu)信號(hào)波動(dòng)性變化較小,得到的各IMF分量及其頻譜如圖15和16所示。
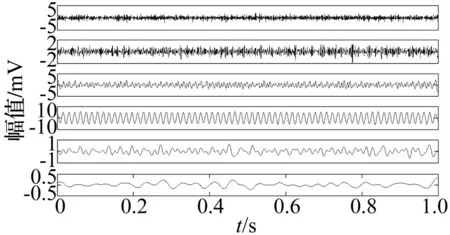
圖15 各IMF分量(ε=1.42)Fig.15 IMFs(ε=1.42)
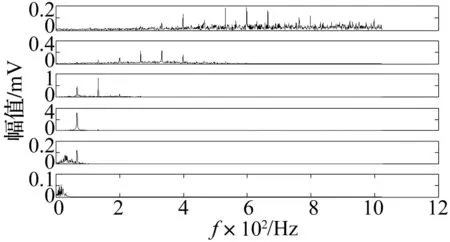
圖16 各IMF頻譜(ε=1.42)Fig.16 Spectrum of IMFs(ε=1.42)
從圖15和圖16可以看出,基頻的模式混疊現(xiàn)象已經(jīng)抑制到ε取0.85時(shí)的一半,這就基本保證了振動(dòng)模式的獨(dú)立化提取,并且IMF5的基頻成分極小,可以忽略。通過(guò)選取的IMF3和IMF4進(jìn)行信號(hào)重構(gòu)得到的重構(gòu)信號(hào)和頻譜如圖17和圖18所示。
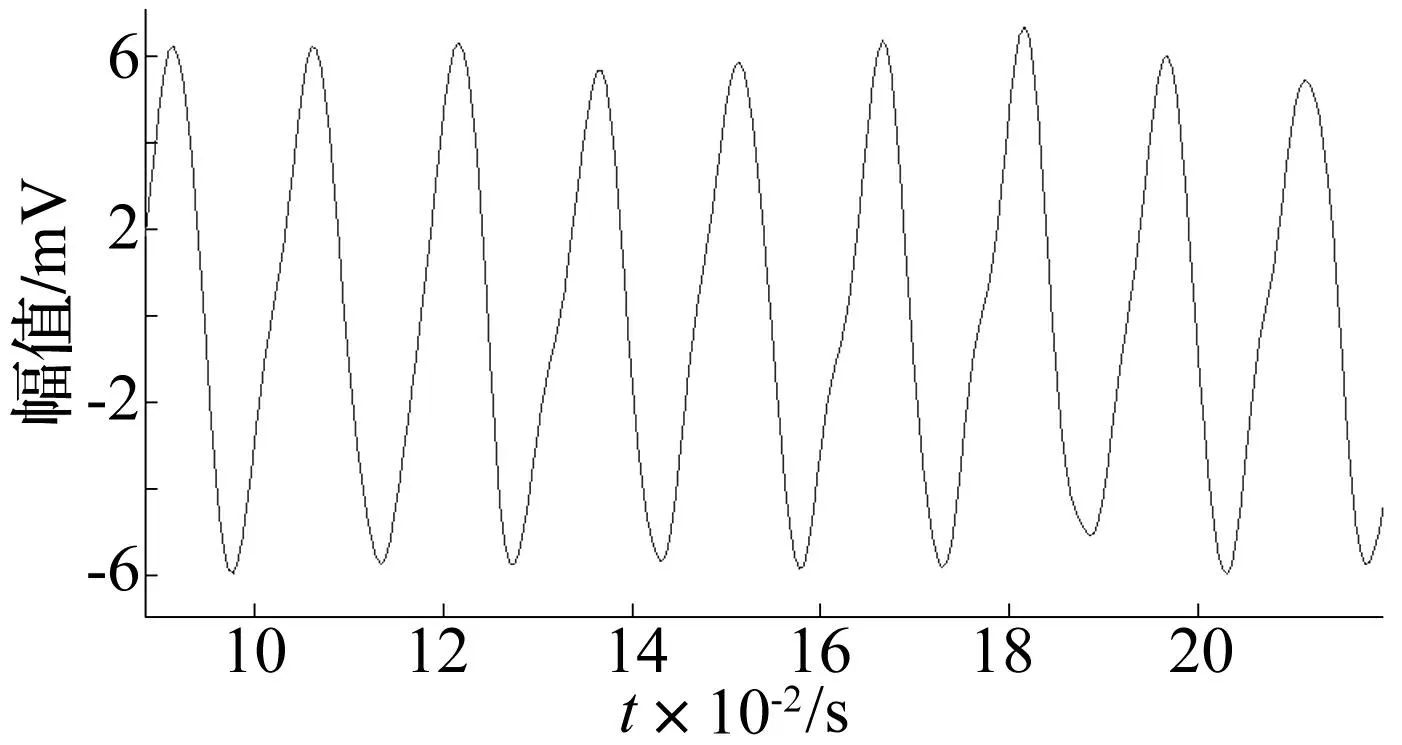
圖17 轉(zhuǎn)子不對(duì)中重構(gòu)信號(hào)(ε=1.42)Fig.17 Reconstruction signal of rotor with misalignment(ε=1.42)
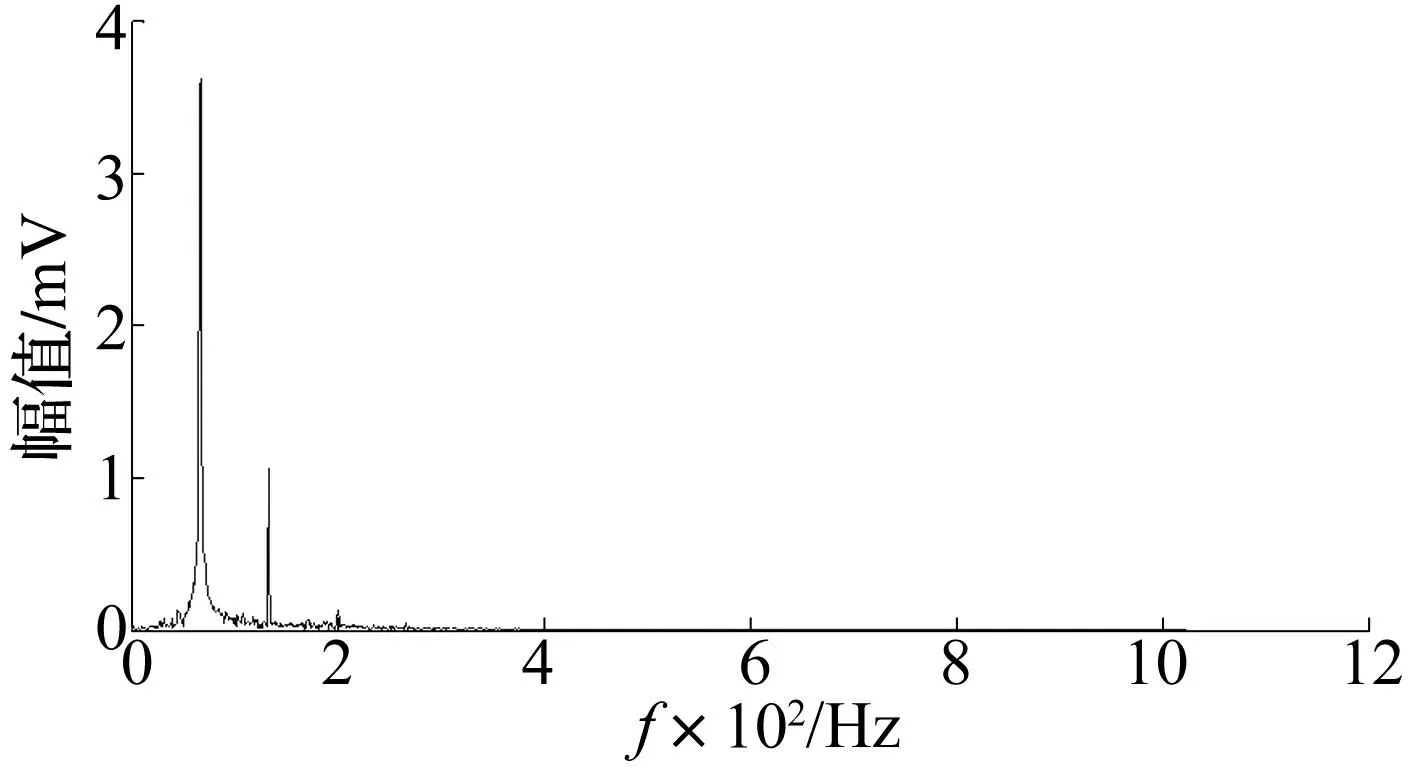
圖18 轉(zhuǎn)子不對(duì)中重構(gòu)信號(hào)頻譜(ε=1.42)Fig.18 Reconstruction signal spectrum of rotor with misalignment(ε=1.42)
由圖17和圖18可以看出不對(duì)中故障的主要振動(dòng)模式得到提取,高頻噪聲消除,時(shí)域信號(hào)較ε取2.0時(shí)的波動(dòng)性更小。以上結(jié)果說(shuō)明,通過(guò)引進(jìn)本項(xiàng)研究中定義的波動(dòng)性變化指標(biāo),可以將傳統(tǒng)EEMD噪聲幅值參數(shù)的定性學(xué)習(xí)過(guò)程轉(zhuǎn)變?yōu)槎繉W(xué)習(xí)過(guò)程,使得獲取的信號(hào)分量物理意義更為明確。因此,分別對(duì)轉(zhuǎn)子處于正常、不平衡、不對(duì)中和松動(dòng)四種狀態(tài)進(jìn)行實(shí)驗(yàn),各采集16組振動(dòng)信號(hào)樣本進(jìn)行EEMD分析并重構(gòu)原信號(hào),按照第2.4節(jié)內(nèi)容分別提取四種轉(zhuǎn)子運(yùn)行狀態(tài)的14種特征指標(biāo),構(gòu)建的標(biāo)準(zhǔn)化特征數(shù)據(jù)集如表4所示。
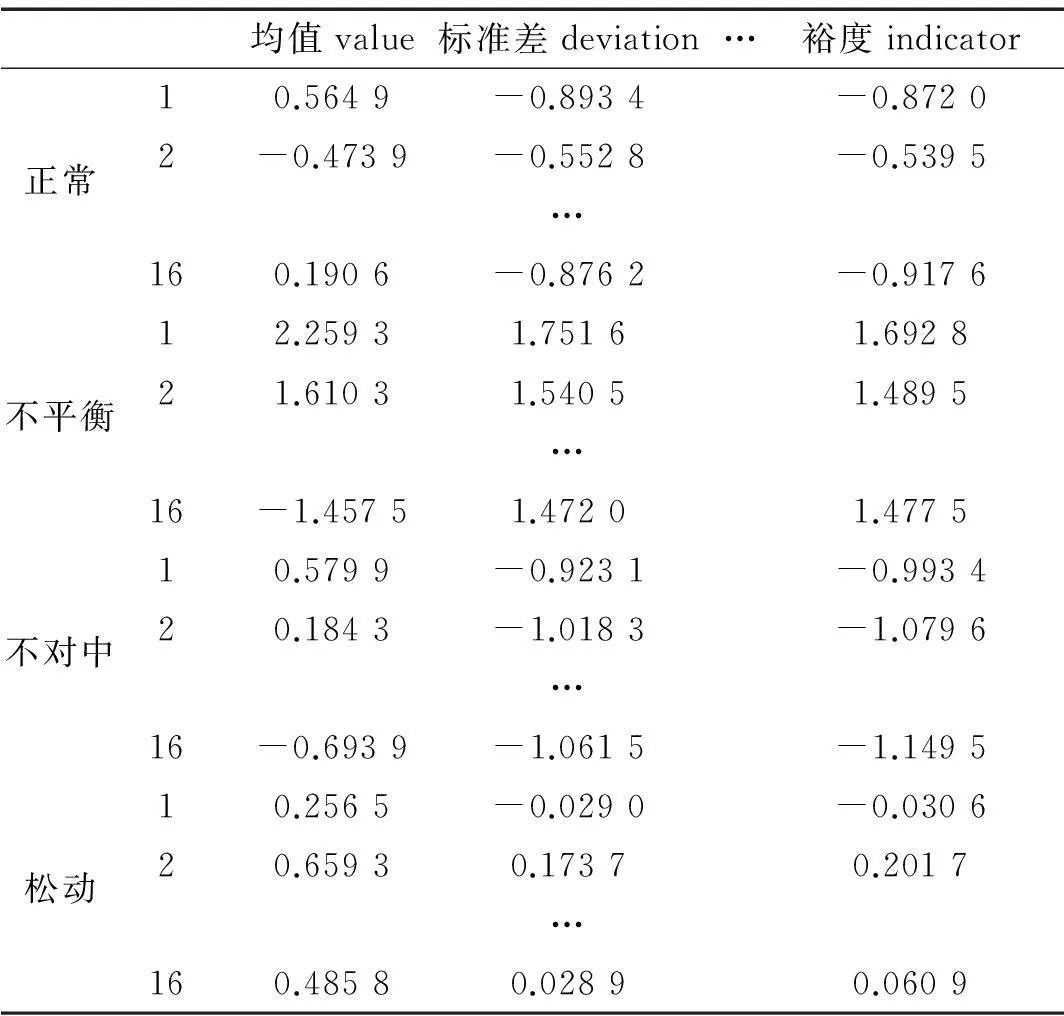
表4 標(biāo)準(zhǔn)化特征數(shù)據(jù)集
對(duì)表4列出的標(biāo)準(zhǔn)化特征數(shù)據(jù)集進(jìn)行PCA分析,得到降維數(shù)據(jù)集,選取對(duì)應(yīng)特征較大的前三個(gè)分量進(jìn)行可視化操作,得到的分類(lèi)效果如圖19所示。同時(shí)列出僅采用PCA分析的分類(lèi)效果如圖20所示。
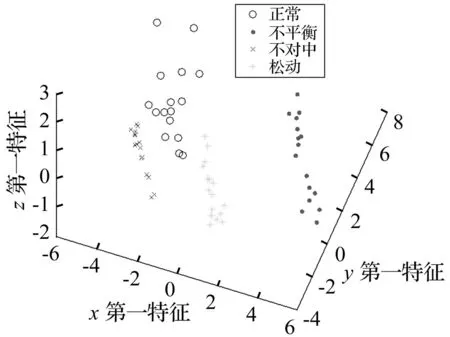
圖19 轉(zhuǎn)子運(yùn)行狀態(tài)的EEMD-PCA分離效果Fig.19 Separation effect of rotor status withEEMD-PCA
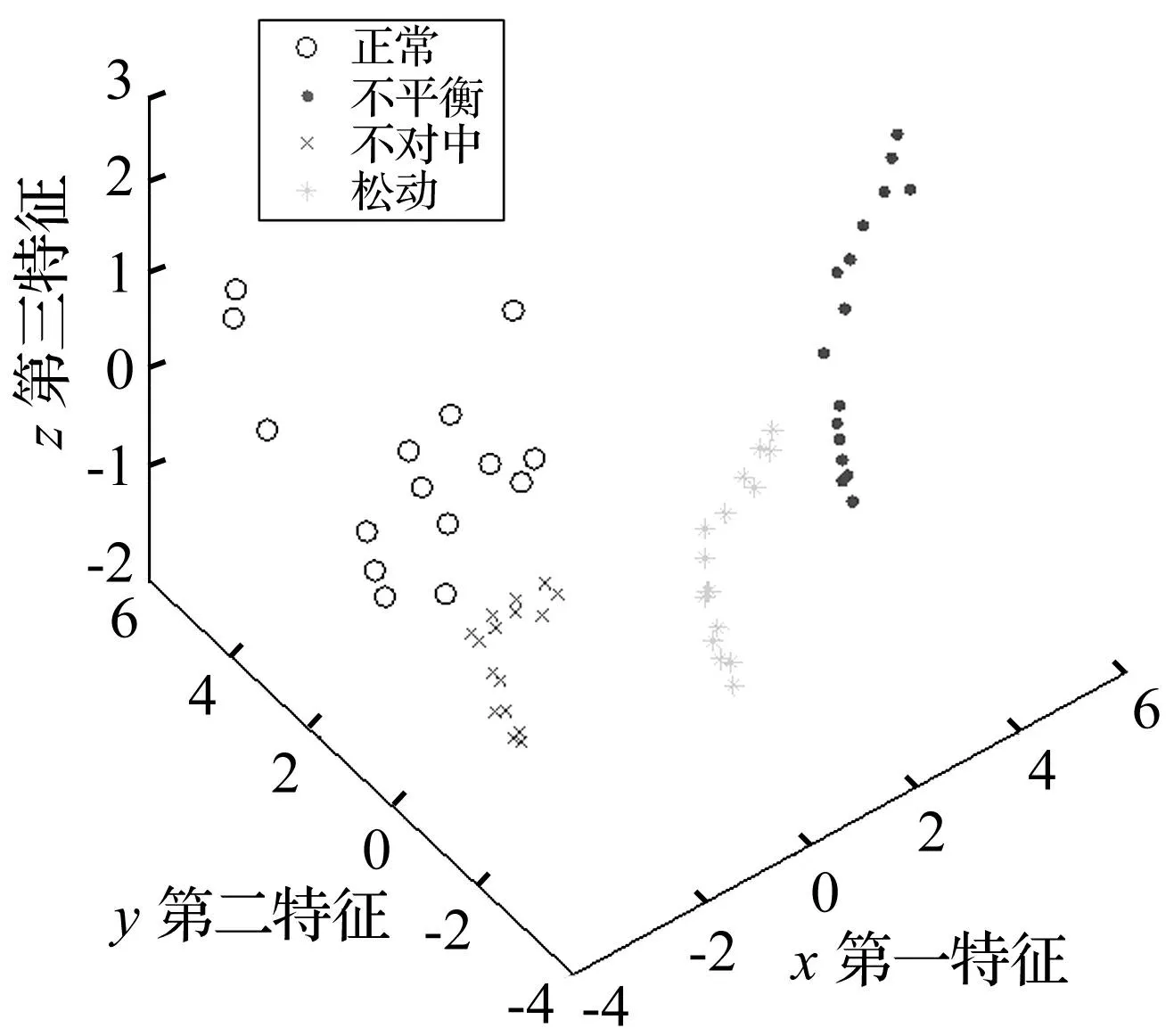
圖20 轉(zhuǎn)子運(yùn)行狀態(tài)的PCA分離效果Fig.20 Separation effect of rotor status with PCA
對(duì)比圖19和20可以看出,采用EEMD-PCA和PCA都能將轉(zhuǎn)子四種典型運(yùn)行狀態(tài)映射至不同區(qū)域。然而,仔細(xì)觀察兩種數(shù)據(jù)分布情況可以發(fā)現(xiàn),僅僅采用PCA進(jìn)行映射時(shí),各類(lèi)別數(shù)據(jù)集都存在不同程度的彎曲現(xiàn)象,其原因在于實(shí)驗(yàn)用轉(zhuǎn)子系統(tǒng)為弱非線性系統(tǒng),導(dǎo)致原始信號(hào)中存在大量高次諧波成分,這些非線性成分使得PCA無(wú)法準(zhǔn)確線性降維;而經(jīng)過(guò)EEMD進(jìn)行振動(dòng)模式提取后的重構(gòu)信號(hào),其原有的高次諧波成分得到消除,主要的線性振動(dòng)模式得到提取,此時(shí)采用PCA映射數(shù)據(jù)集將主要呈現(xiàn)線性變化規(guī)律。因此,可以想象,當(dāng)系統(tǒng)具有更強(qiáng)非線性的時(shí)候,數(shù)據(jù)集可視化的彎曲現(xiàn)象將更明顯,當(dāng)振動(dòng)幅值達(dá)到一定程度時(shí),不同類(lèi)別的數(shù)據(jù)容易發(fā)生交疊,難以找出最優(yōu)分類(lèi)超平面。因此,采用本項(xiàng)研究提出的將EEMD與PCA結(jié)合分析轉(zhuǎn)子振動(dòng)信號(hào)的方法,能夠比較準(zhǔn)確地區(qū)分轉(zhuǎn)子幾種典型運(yùn)行狀態(tài)。
4結(jié)論
(1) EEMD能夠從具有非線性、非平穩(wěn)性和噪聲干擾的離心式壓縮機(jī)轉(zhuǎn)子振動(dòng)信號(hào)中獨(dú)立化提取其主要振動(dòng)模式;
(2) 采用FFT結(jié)合相關(guān)分析的方法能夠輔助選擇分量并確定EEMD參數(shù),從而準(zhǔn)確獨(dú)立化提取代表轉(zhuǎn)子主要振動(dòng)模式的基本模式分量,不僅能重構(gòu)信號(hào),還有助于研究單一振動(dòng)模式規(guī)律;
(3) 提出的波動(dòng)性變化指標(biāo)能夠?qū)崿F(xiàn)轉(zhuǎn)子振動(dòng)信號(hào)EEMD分解過(guò)程中的噪聲幅值參數(shù)定量識(shí)別;
(4) EEMD具有解除信號(hào)非平穩(wěn)非線性干擾的效果,不同類(lèi)別重構(gòu)信號(hào)特征數(shù)據(jù)集的PCA分離效果表明, EEMD-PCA方法能夠快速識(shí)別離心式壓縮機(jī)的幾種常見(jiàn)典型故障。
參 考 文 獻(xiàn)
[ 1 ] 陳宗華,秦云龍,梁曉剛,等. 石化行業(yè)大型離心式壓縮機(jī)組安全運(yùn)行研究[J]. 化工裝備技術(shù),2005,26(2):57-64.
CHEN Zong-hua, QIN Yun-long, LIANG Xiao-gang, et al.Safe operation research of large centrifugal compressor unit in petrochemical industry[J]. Chemical Equipment Technology, 2005, 26(2): 57-64.
[ 2 ] 張松梅. 石化行業(yè)幾種離心式壓縮機(jī)故障診斷的應(yīng)用[D]. 大連:大連理工大學(xué),2005.
[ 3 ] 王秋香. K5403離心式壓縮機(jī)狀態(tài)監(jiān)測(cè)與趨勢(shì)預(yù)測(cè)技術(shù)研究[D]. 長(zhǎng)沙:湖南大學(xué),2009.
[ 4 ] 徐洪淼. 離心壓縮機(jī)振動(dòng)故障分析與處理[D]. 沈陽(yáng):沈陽(yáng)工業(yè)大學(xué),2009.
[ 5 ] 曾慶生,王湘江. 基于小波能量譜和粗糙集的離心式壓縮機(jī)振動(dòng)故障診斷[J]. 中南大學(xué)學(xué)報(bào),2009,40(3):706-710.
ZENG Qing-sheng, WANG Xiang-jiang.Fault diagnosis of centrifugal compressor vibration based on wavelet power spectrum and rough set theory[J]. Journal of Central South University, 2009, 40(3): 706-710.
[ 6 ] Thompson W E. Fluid dynamic excitation of centrifugal compressor rotor vibrations[J]. Journal of Fluids Engineering, 2010,100(1): 73-78.
[ 7 ] Huang N E, Shen Z, Long S R, et al. The empirical mode decomposition and the Hilbert spectrum for non-linear and non stationary time series analysis[J].Proceedings of the Royal Society A: Mathematical Physical and Engineering Sciences, 1998, 454: 903-995.
[ 8 ] 何正嘉, 訾艷陽(yáng), 張西寧. 現(xiàn)代信號(hào)處理及工程應(yīng)用[M]. 西安:西安交通大學(xué)出版社,2007.
[ 9 ] Yu D J, Cheng J S, Yang Y. Application of EMD method and Hilbert spectrum to the fault diagnosis ofroller bearings[J]. Mechanical System and Signal Processing, 2005,19:259-270.
[10] Gai G H. The processing of rotor startup signals based on empirical mode decomposition[J]. Mechanical System and Signal Processing, 2006, 20: 222-235.
[11] Liu B, Riemenschneider S, Xu Y.Gearbox fault diagnosis using empirical mode decomposition and Hilbert spectrum[J]. Mechanical System and Signal Processing, 2006, 20: 718-734.
[12] Huang N E. A new view of nonlinear waves: the Hilbert spectrum[J]. Annual Review of Fluid Mechanics,1999, 31: 417-457.
[13] 趙進(jìn)平.異常事件對(duì)EMD方法的影響及其解決方法研究[J].青島海洋大學(xué)學(xué)報(bào),2001,31(6):805-814.
ZHAO Jin-ping. Study on the effects of abnormal events to empirical mode decomposition method and the removal method for abnormal signal[J]. Journal of Ocean University of Qingdao, 2001, 31(6): 805-814.
[14] Rato R T, Ortigueira M D, Batista A G. On the HHT, its problems, and some solutions[J].Mechanical Systems and Signal Processing,2008,22:1374-1394.
[15] 胡愛(ài)軍,孫敬敬,向玲.經(jīng)驗(yàn)?zāi)B(tài)分解中的模態(tài)混疊問(wèn)題[J].振動(dòng)、測(cè)試與診斷,2011,31(4):429-434.
HU Ai-jun, SUN Jing-jing, XIANG ling.Mode mixing in empirical mode decomposition[J]. Journal of Vibration, Measurement & Diagnosis, 2011, 31(4): 429-434.
[16] Wu Z H, Huang N E. Ensemble empirical mode decomposition: a noise assisted data analysis method[J].Advances in Adaptive Data Analysis,2009,1(1):1-41.
[17] 曹沖鋒,楊世錫,楊將新.大型旋轉(zhuǎn)機(jī)械非平穩(wěn)振動(dòng)信號(hào)的EEMD降噪方法[J].振動(dòng)與沖擊,2009,28(9):33-38.
CAO Chong-feng, YANG Shi-xi, YANG Jiang-xin. De-noising method for non-stationary vibration signals of large rotating machineries based on ensemble empirical mode decomposition[J]. Journal of Vibration and Shock,2009, 28(9): 33-38.
[18] Yu Y, Lang H H. Fault Diagnosis of Rotor Rub based on Ensemble EMD[C]//ICEMI’09. 9th International Conference on Electronic Measurement & Instruments, 2009, 2-144-2-148.
[19] Lei Y G, He Z J, Zi YY. Application of the EEMD method to rotor fault diagnosis of rotating machinery[J]. Mechanical System and Signal Processing, 2009,23:1327-1338.
[20] Lei Y G, Li N P, Lin J, et al. Fault diagnosis of rotating machinery based on an adaptive ensemble empirical mode decomposition[J]. Sensors, 2013, 13, 16950-16964.
[21] 陳仁祥,湯寶平,呂中亮. 基于相關(guān)系數(shù)的EEMD轉(zhuǎn)子振動(dòng)信號(hào)降噪方法[J]. 振動(dòng)、測(cè)試與診斷,2012,32(4):542-546.
CHEN Ren-xiang, TANG Bao-ping, Lü Zhong-liang. Ensemble empirical mode decomposition de-noising method based on correlation coefficients for vibration signal of rotor system[J]. Journal of Vibration, Measurement & Diagnosis,2012,32(4): 542-546.
[22] Zhang W B, Zhou Y J, Zhu J X. A new rotor fault diagnosis method based on EEMD sample entropy and grey relation degree[J]. Applied Mechanics and Materials, 2013, (347/348/349/350): 426-429.
[23] Broomhead D S, King G P. Extracting qualitative dynamics from experimental data[J].Physica D, 1986, 20: 217-236.
[24] 李巍華, 史鐵林, 楊叔子. 基于非線性判別分析的故障分類(lèi)方法研究[J]. 振動(dòng)工程學(xué)報(bào),2005,18(2):133-138.
LI Wei-hua,SHI Tie-lin,YANG Shu-zi. Mechanical fault classification using nonlinear discriminant analysis[J]. Journal of Vibration Engineering, 2005, 18(2): 133-138.
[25] 馬再超,趙榮珍,楊文瑛. 轉(zhuǎn)子故障特征數(shù)據(jù)分類(lèi)的KPCA-BFDA方法[J]. 振動(dòng)、測(cè)試與診斷, 2013, 33(2): 192-198.
MA Zai-chao, ZHAO Rong-zhen, YANG Wen-ying. KPCA-BFDA for the classification of rotor fault feature data[J]. Journal of Vibration, Measurement & Diagnosis,2013,33(2):192-198.
EEMD-PCA method for rotor fault identification in a centrifugal compressor
MAZai-chao1,WENGuang-rui1,2,ZHANGHeng-hui1,LIAOYu-hei1
(1. State Key Laboratory for Strength and Vibration of Mechanical Structures, Xian Jiaotong University, Xi’an 710049, China;2. School of Mechanical Engineering, Xinjiang University, Wulumuqi 830047, China)
Abstract:Aiming at a centrifugal compressor rotor having small vibration but vibration signals with features of non-stationary, non-linear and interfered with noise, a fault identification method using EEMD together with PCA was proposed for rotor system in a centrifugal compressor. Based on choosing IMFs with correlation analysis combined with FFT, the fluctuant variation index was constructed to recognize amplitude parameters of added noise in EEMD quantitatively. At the same time, 14 kinds of vibration estimated index were calculated to form a standardized feature data set. Consequently, the dimension reduction method of PCA was used to obtain categories of vibration modes with different types of fault. Analysis results of typical fault vibration signals for a rotor system in a centrifugal compressor showed that based on the elimination of non-stationary and non-linear interferences, main vibration modes can be extracted fast and independently, thus feature data regions representing different fault categories can be formulated and the fault identification ability for centrifugal compressor can be improved efficiently with the proposed method.
Key words:EEMD; PCA; fluctuant variation index; rotor of a centrifugal compressor
中圖分類(lèi)號(hào):TH165;TP18
文獻(xiàn)標(biāo)志碼:A
DOI:10.13465/j.cnki.jvs.2016.04.024
通信作者溫廣瑞 男,博士后,教授,博士生導(dǎo)師,1976年7月生
收稿日期:2014-08-08修改稿收到日期:2015-07-11
基金項(xiàng)目:國(guó)家自然科學(xué)基金資助項(xiàng)目(51421004);國(guó)家自然科學(xué)基金項(xiàng)目(51365051);教育部新世紀(jì)優(yōu)秀人才支持計(jì)劃(NCET-13-0461);中央高校基本科研業(yè)務(wù)費(fèi)專(zhuān)項(xiàng)資金資助
第一作者 馬再超 男,博士生,1986年8月生
