
汽車A柱盲區消除系統設計
2016-04-28 23:32:36張博化有為于麗
科技傳播 2016年7期
張博+化有為+于麗
摘 要 本次作品的設計思路主要是通過攝像頭采集車外路況影響,通過數據線路傳輸到車內顯示器中,再由顯示器成像與車內,為駕駛員提供路面情況參考。同時由于攝像頭視角有限,以及高速情況下駕駛員視野盲區增大,即使再車內成像也難以觀察到一些障礙物,因此加裝一套感應雷達裝置,與攝像頭配合使用,使得駕駛員在視覺和聽覺上共同收到提示,避免視覺盲區帶來的危險。
關鍵詞 汽車A柱盲區;視線盲區處理;視覺;聽覺
中圖分類號 TP3 文獻標識碼 A 文章編號 1674-6708(2016)160-0135-02
1 緒論
1.1 研究背景
我國機動車保有量逐年攀升,大大的增加了普通民眾出行時對汽車這種交通工具的依賴。然而隨著汽車保有量的增加,每年我國發生的交通事故也成上升趨勢,國家針對交通事故愈發重視,從政策上出發,加大了對道路安全的監管力度,嚴格強化了交通法規,從駕駛員角度出發,使駕駛證考試變得更加嚴格與困難,提高了駕車上路所要求的水平。然而,僅僅從國家政策角度出發是遠遠不夠的。作為汽車工業中的重要一環,汽車安全技術也起著至關重要的作用。因此設計一款實用合理的A柱盲區消除系統并在一般乘車用上安裝使用可以大幅度提高汽車主動安全性,對汽車工業的發展以及汽車駕乘人員安全至關重要。
1.2 研究意義
2013年11月4日,駕駛員宋某駕車上班途中因為A柱盲區撞了環衛工作人員所幸傷情不重;2013年12月23日,新浪大連新聞報道,一輛SUV因A柱盲區擋司機視線慘醜車禍,造成一死一傷。[1]由于因A柱盲區引起的路面交通事故頻發,所以人們日益關注A柱盲區的問題。A柱盲區消除系統的研發,是汽車主動安全的一項突破性成就,解決了汽車在行駛過程中尤其是轉彎時,駕駛員視角難以觀察斜前方,發生剮蹭等一些不必要的事故的問題。因此解決A柱盲區的問題在汽車安全技術領域來講有著必要的研究意義。
1.3 A柱盲區消除系統發展現狀
早在1885年德國人卡爾·佛里特立奇·本茨發明汽車以來,汽車的安全性就一直為人們所重視。而有著居安思危未雨綢繆思想的工程師,則在汽車工業發展之初就重視起汽車主動規避風險的能力,稱為汽車主動安全性。在消除A柱盲區這個問題上,前人做了很多的努力,其中主要包括[2]以下方面。
1)把汽車A柱上面開三角窗或者安裝倒車貼。但是這種方案由于效果有限且對A柱結構改變后不符合原來白車身設計時的結構強度影響被動安全性能。
2)通過改編A柱材料進而提高A柱強度,在滿足強度額前提下適當縮小A柱的尺寸(尤其是寬度)。
3)用三角形的硬質材料(如鋼鐵)填充到樹脂玻璃中,利用樹脂玻璃材料作為A柱材料,達到“A柱透明化”的效果,進而解決A柱盲區問題。
4)在車外安裝輔助攝像頭,通過線路連接到車內,在車內A柱處安裝等效顯示器把車外的路況影響呈現在車內A柱上的顯示器上。
2 A柱盲區消除系統理論介紹
2.1 A柱與駕駛員距離及A柱寬度對盲區的影響分析
眾所周知,不同車型擁有不同的A柱,包括傾斜角度的不同以及寬窄度的不同等等。對盲區產生影響的主要是A柱的寬窄度,也就是說在駕駛員位置不變的情況下,A柱越寬所產生的盲區越大。另外如果A柱寬度不變的情況下,駕駛員距離A柱越近則A柱盲區越大。由于中國汽車駕駛員位置位于前排左側所以左面的A柱相比右面的A柱產生的盲區要大一些。如圖1所示。
其中,左側A柱盲區為6.8°(紅色區域),右側A柱盲區為2.3°(粉色區域),正常視野為210°(綠色區域)。
2.2 車速對駕駛盲區的影響分析
擁有駕駛經歷的人都知道,當駕駛汽車達到一定速度時,如果在橫向突然出現物體是極為危險的,原因一在于車速快難以控制汽車制動,原因二在于沒有發現橫向有物體出現而忽略制動。這就不禁讓我們想到車速與視野范圍是否存在一定聯系?經具體實驗及查閱文獻資料得知,當車速在40km/h的時候,駕駛員視野范圍是100°,隨著車速的增加,每提升1km/h,視野減小1°。靜止時視野約為210°,70km/h時視野約為65°,100km/h時視野約為40°[3]。因此可知視野盲區不單只有A柱遮擋造成,也由車速決定。所以本文的消除A柱盲區系統在低速轉彎時應用更為合理。
2.3 設計解決方案
本文的設計思路主要是通過攝像頭采集車外路況影響,通過數據線路傳輸到車內顯示器中,再由顯示器成像與車內,為駕駛員提供路面情況參考。同時由于攝像頭視角有限,以及高速情況下駕駛員視野盲區增大,即使再車內成像也難以觀察到一些障礙物,因此加裝一套感應雷達裝置,與攝像頭配合使用,使得駕駛員在視覺和聽覺上共同收到提示,避免視覺盲區帶來的危險。設計方案原理如圖2所示。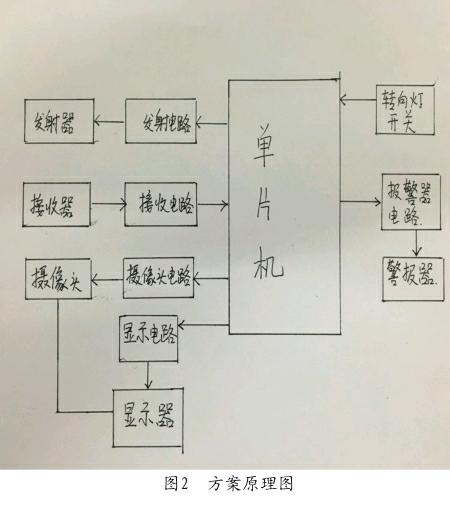
3 A柱盲區消除系統硬件與實現
3.1 硬件裝配及布置
由于各種汽車A柱設計不同,所以為使得駕駛員視線觀察舒適方便,應適當調整攝像頭角度及車內顯示器角度和位置,故在這里對攝像頭角度及顯示器角度和位置不加以詳細說明,以方便駕駛員觀察為準。
具體裝配及布置(以汽車左側A柱為例):
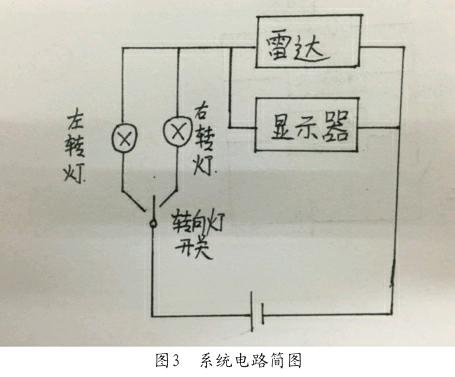
在汽車A柱上鉆與攝像頭大小相似的孔,再打磨至與攝像頭尺寸一致。將攝像頭安裝至A柱上,調整好角度使其可以照到路面。在A柱上以相同方式安裝感應雷達,感應范圍不宜過大,本文中采用1.5m~2m報警雷達。將攝像頭數據傳輸線與雷達數據傳輸線共同連接在事先編寫好程序的處理器上,雷達數據由音頻線連接一個小型喇叭輸出,攝像頭數據由視頻AV線連接顯示器輸出。以轉向燈開關為觸發點,也就是說在駕駛員打開轉向開關的時刻,攝像頭與雷達開始工作,達到轉向時A柱盲區成像的效果,從而消除A柱盲區。電路簡圖如圖3所示。
3.2 運用單片機實現控制3.2.1 單片機介紹
本系統中采用的AT89S52單片機該種單片機是一種低功耗高性能的8位微控制器具有8k字節在系統可編程Flash存儲器,AT89S52使用Atmel公司高密度非易失性存儲器技術制造與工業80C51產品指令和引腳完全兼容片上Flash允許程序存儲器在系統可編程亦適于常規編程器在單芯片上AT89S52擁有靈巧的8位CPU和在系統可編程Flash使得AT89S52為眾多嵌入式控制應用系統提供高靈活有效的解決方案[4]。
3.2.2 單片機控制的實現
對單片機進行程序編寫(具體程序代碼參考市面上已有倒車影響雷達裝置的單片機程序),達到轉向開關開啟,雷達發射電路工作、攝像探頭工作、接收探頭工作、接收電路工作,經單片機處理使得顯示器電路工作、報警電路工作的效果。報警及顯示電路圖4所示。
4 結論與展望
經過實際試驗證明本裝置在車輛直線行駛及轉彎時都能夠正常工作,起到一定的消除A柱盲區的作用,即使在攝像頭角度無法觀測到的位置出現障礙物,雷達也可起到一定的報警提示功能,從而避免事故發生,有一定的實用價值。但在實用中也會出現一些問題,比如路面顛簸改編了攝像頭角度與位置、高速行駛超車時如對向有車駛過報警裝置會在不需要響應時響應,造成不必要的麻煩、整體線路沒有與CAN總線相連,獨立在整車系統之外,與車輛的融合度不高等問題。這些都是本系統設計上的不足之處,因此這一工作還有很大程度的提高空間,需要不斷改進與完善。
在未來的主動安全領域,A柱盲區消除將有著不可取代的作用。未來的A柱盲區發展在滿足高度集成高度電子化的同時,應著眼于人機結合領域,將人眼視覺顯示器相關聯,顯示器主動捕捉人球的運動,達到人眼隨動的效果,則駕駛員應用起這套程序來更加得心應手。
參考文獻
[1]廖術娟.基于電子透明理念的A柱盲區消除系統研究[D].成都:西南交通大學,2014.
[2]張俊.基于TMS320DM642的A柱盲區消除系統的研究與設計[D].成都:西南交通大學,2009.
[3]王琪崢,董力軍.A柱擋住視線釀事故[J].WORLD OF DRIVER駕駛園,2012(7):90.
[4]劉鑫,朱靖玉.基于單片機的倒車雷達的設計.電子設計工程,2012,20(1):94-97.
