
利用Hausdorff距離地磁匹配算法的室內定位方法
2016-04-28 23:49:31姜浩黃鶴趙焰楊軍星
科技傳播 2016年7期
姜浩+黃鶴+趙焰+楊軍星
摘 要 目前在眾多室內環境中,存在大量鋼筋混凝土結構的建筑物,會產生明顯地磁異常場擾動。為了探究如何利用局部地磁異常場來實現室內定位過程,先簡要介紹地磁場特征和地磁匹配原理,提出將Hausdorff距離算法運用到地磁匹配定位中。在實驗區域中用載體采集磁場特征數據建立定位基準圖,計算實時獲得地磁值與數據庫里地磁特征量的相似度,估計出地磁傳感器的位置。實驗結果表明,提高基準圖的精度,降低量測噪聲和控制載體采集速度,有利于該匹配算法實現較好定位效果。
關鍵詞 地磁異常場;位置估計;室內定位;Hausdorff距離
中圖分類號 TU19 文獻標識碼 A 文章編號 1674-6708(2016)160-0157-02
地磁場可以看作一個矢量場,在這個巨大的矢量場內,根據地磁學理論,靠近人類活動范圍的每個位置上都具有唯一的磁場矢量值,如果可以測出該位置的多個地磁場的典型特征信息,即可實現全球任意地點定位。在生物界中,人類已經發現許多動物借助地磁場來實現方向定位和導航[1]。例如,大螯蝦不僅可以判斷出地磁場的方向,甚至能估計出自己相對于目的地的距離。目前在室外民用領域中,借助GPS可以實現精確定位和導航,然而GPS信號被建筑物遮擋,無法在室內進行定位。為了解決這個問題,提出了基于無線網絡和藍牙信標定位等方法。雖然提高定位精度,卻要建立昂貴的基礎設施,并容易受到移動物體、多路徑效應的影響。實驗證明[2]在鋼筋混凝土結構的建筑物中,存在局部地磁異常場,這些異常場隨著位置而有所不同,并且在時間上很穩定。本文選用這些地磁異常特征量繪制成基準圖,通過載體上的地磁傳感器測量地磁特征,根據Hausdorff距離地磁匹配算法與基準圖進行相關匹配,實現對載體位置估計,并且通過仿真實驗驗證算法的可行性。
1 室內定位方法1.1 地磁匹配原理
在地磁擾動場中任何位置上地磁數據都具有典型特征,地磁匹配就是基于每個坐標位置上的地磁場強度值來實現定位的。室內地磁定位系統操作主要分為2部分,具體如圖1所示。
1)預先建立地磁基準圖,使匹配區域中的位置坐標與地磁場強度值相對應,這一步要求地磁基準圖的精度適當,以便于下一步的定位。可以通過每隔0.5m采集一次地磁數據(連續采集10次數據求平均值,),通過插值構建地磁基準圖。
2)估計載體位置,利用地磁傳感器在載體運動過程中采集的地磁數據,通過合適的地磁匹配算法,將具有實時性的地磁特征量與基準圖庫中數據相比較,來估計當下載體在匹配區域中的位置。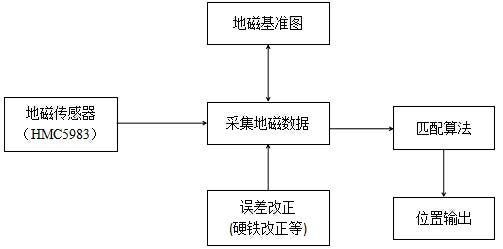
1.2 地磁匹配算法
與地形匹配中點匹配算法類似,不過地磁匹配算法涉及的匹配特征量有多個。隨著技術的進步,小型磁傳感器不僅可以獲得地磁場總強度,而且可以獲得在正北、正東以及豎直方向的各個分矢量,甚至磁偏角和磁傾角等。由于本文所用地磁傳感器不能精確測量地磁場三分量的方向角,加之載體在運動過程中的航向角經常變化。地磁基準圖的構建采用地磁異常場總強度,在實驗區域中分布特征明顯,隨時間變化非常穩定。
目前,地磁匹配算法的研究不是很成熟,多處于仿真研究階段,主要有相關度度量算法和濾波算法[3]。由于地磁傳感器在測量中存在噪聲,載體的磁性物質干擾,計算過程復雜等其他誤差和失真因素的影響,致使定位精度不高,匹配成功率下降。為了提高載體采集特征量序列與基準圖采樣點上特征量序列的相關性,本文采用Hausdorff距離地磁匹配算法,它會降低一組地磁序列中數據受到噪聲等因素干擾引起的地磁數據不穩定的影響,在數據庫中尋找出最合適的匹配序列。
1.3 Hausdorff距離算法
Hausdorff距離又被稱作極大極小距離,它描述了兩組點集之間的相似程度,已普遍應用到二值圖形學中,地磁匹配借助此算法獲得新測度方式[4]。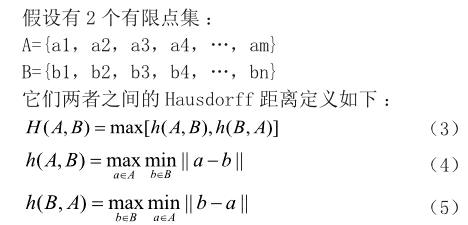
式中,H(A,B)表示兩個方向上Hausdorff距離,h(A,B)表示A集合元素到B集合元素的單一方向上Hausdorff距離,令前者A與B互換可推出h(B,A)的定義。考慮僅比較磁場總強度,同時它也是一個標量,將|||| ||a ba b?=?看作是A,B間距離范數。從公式中,可以看出Hausdorff距離反映了兩個點集的不匹配程度,它的距離越大,則兩個集合相似性越低。
Hausdorff距離地磁匹配算法與傳統算法有一定區別,它不強調點集中具體的匹配點對,使得點與點的關系變得模糊起來,因此在室內地磁定位中可以增強抗干擾性和容錯性。
選用磁場總強度作為地磁特征量,建立地磁基準圖,基于Hausdorff距離算法完成地磁匹配定位。實驗過程中,由地磁傳感器測量模塊產生地磁特征量序列,遍歷地磁基準圖,將基準地磁數據序列當作(3)中集合A,將特征量序列當作集合B,運用Hausdorff距離算法,計算出H(A,B)中的最小值,它所對應的位置坐標即為匹配定位結果。
2 定位仿真環境
2.1 地磁基準圖布置
為了實現前述定位過程,選擇在本校科技研討樓3層南北走廊進行實驗,所取地磁區域長43.2m,寬1.8m,共有219(73×3)個采樣點,采樣點間隔為0.6m。將實測采樣點上的地磁場強度作為Z值,走廊朝北方向作為X軸正方向,西方向作為Y軸方向,通過surfer軟件建立地磁場總強度分布圖。為了提高基準圖分辨率,采用線性插值擬合出地磁場等值面圖,將分辨率由0.6m提高到0.1m,如圖2所示。
2.2 實驗結果與分析
為了簡化實驗過程,選用一個智能小車作為載體,將地磁傳感器(HMC5983)放置在小車豎直上方1.2m處(正常人手持手機高度),中間用木條連接,盡量降低磁性物質對測量精度的影響。設小車在地磁區域中作勻速運動,初始位置隨機產生,采樣周期0.2s,測量噪聲為高斯白噪聲,實驗精度用定位坐標與實時坐標的點位誤差來表示。
依據實驗過程,分析比較量測噪聲、小車行駛速度等因素對室內定位結果的影響。
1)設小車速度V=0.6m/s,量測噪聲分別取50nT和100nT,在相同的匹配區域中隨機放置小車。通過多次實驗分析后,得出在其他影響因素不變的情況下,量測噪聲越大,定位精度越低,甚至會增加錯誤匹配結果的次數,如表1所示。因此,地磁采集裝置避免使用磁性物質制成,保持與磁傳感器一定的距離,另外考慮精度更高、抗干擾能力更強的地磁測量模塊。
2)設量測噪聲為50nT,小車速度分別選取0.6m/s、1.2m/s、1.8m/s 3種情況下,與(1)種相同的匹配區域中隨機放置小車。通過多次實驗后,得出在其他影響因素不變的情況下,小車的速度快慢對于匹配結果的影響基本忽略不計,但是小車的速度過快,導致磁傳感器采集的地磁數據量不夠,會對匹配結果產生影響,如表2所示。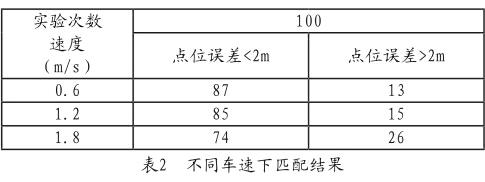
3 結論
本文提出基于Hausdorff距離地磁匹配算法的室內定位方法,并進行多次仿真實驗,證明了該算法在室內定位中的可行性。由于本文選取的實驗場所地磁匹配信息變化不明顯,考慮下一步提高地磁基準圖的精度。針對單一方式實現室內定位過程的匹配準確率不高的情況,探究利用當下無基礎設施的WiFi環境來進一步提高室內定位的精度,使建立一種準確快速的室內定位方法成為可能。
參考文獻
[1]Larry C.Boles and Kenneth J. Lohmann. True navigation and magnetic maps in spiny lobsters. Nature,421:60-63,2003
[2]G.Casinovi A.Geri, and G.M.Veca. Magnetic filed near a concrete wall during a lighning stroke. IEEE Transactions on Magnetic.vol.25 pp.4006-4008,1989
[3]鄧翠婷,黃朝艷,趙華,等.地磁匹配導航算法綜述[J].科學技術與工程,2012,24(12):6125-6131.
[4]徐遵義,晏磊,寧書年,等.基于Hausdorff距離的海底地形匹配算法仿真研究[J].計算機工程,2007,33(9):7-9.
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
