基于RBF網絡滑模變結構控制的導向鉆井穩定平臺研究
2016-05-03 07:34:06作者邱龍孫柯西安石油大學電子工程學院
電子制作 2016年7期
作者/邱龍、孫柯,西安石油大學電子工程學院
?
基于RBF網絡滑模變結構控制的導向鉆井穩定平臺研究
作者/邱龍、孫柯,西安石油大學電子工程學院
文章摘要:針對摩擦問題對旋轉導向鉆井穩定平臺存在影響,提出一種基于RBF神經網絡滑模變結構控制方法。采用神經網絡和滑模變結構相結合,能夠提高穩定平臺控制的精確性和抗干擾能力。實驗結果表明,RBF神經網絡滑模變結構控制方法能夠有效的跟蹤預設工具面角角位置,有較強的魯棒性。
關鍵詞:旋轉導向鉆井穩定平臺;RBF神經網絡;滑模變結構
引言
對穩定平臺控制是旋轉導向鉆井系統的關鍵環節。在鉆井過程中,鉆井工具受井下復雜多變的工作環境影響,導致干擾穩定平臺系統控制精度的參量較多。并且穩定平臺跟隨鉆柱一直處于旋轉狀態,具有旋轉摩擦的非常規運動特性,因此穩定平臺受較多摩擦扭矩變化的影響較大。考慮上述因素,研究可靠的控制策略是十分必要和關鍵的。
本文提出滑模變結構控制器與RBF神經網絡相結合來對旋轉導線鉆井穩定平臺進行控制。主要是利用RBF神經網絡具有高度非線性的連續時間動力系統這一特點,并且具有很強的自學習功能和對非線性系統的強大映射能力。最后結合滑模控制提高系統魯棒性和抗干擾能力。
1.穩定平臺模型
根據穩定平臺在井下的工作方式,穩定平臺可以被看作發電機式的單軸慣性穩定平臺系統。旋轉導向鉆井穩定平臺由兩個渦輪電機,即上渦輪電機和下渦輪電機,電子控制倉及控制軸組成。
穩定平臺廣義被控對象數學模型可寫為
其中ku為PWM脈寬調制系數,kE為電樞電流與電磁力矩之間的比例常數,kw為陀螺傳感器轉換系數,Ff為摩擦力矩,Fn為其他干擾力矩。
2.控制器設計
■2.1變結構控制器設計
■2.2RBF神經網絡自適應滑模控制器設計
RBF神經網絡是一種具有單隱層的高效的三層前饋式神經網絡,具有最佳逼近性能和全局最優特性,且網絡結構簡單,訓練速度快。

x為RBF網絡輸入,ci表示RBF網絡第i個神經元的中心位置,bi為第i個神經元的寬度,wT為RBF網絡權值。
其中,hi(x)為RBF網絡輸出
■2.3穩定性分析


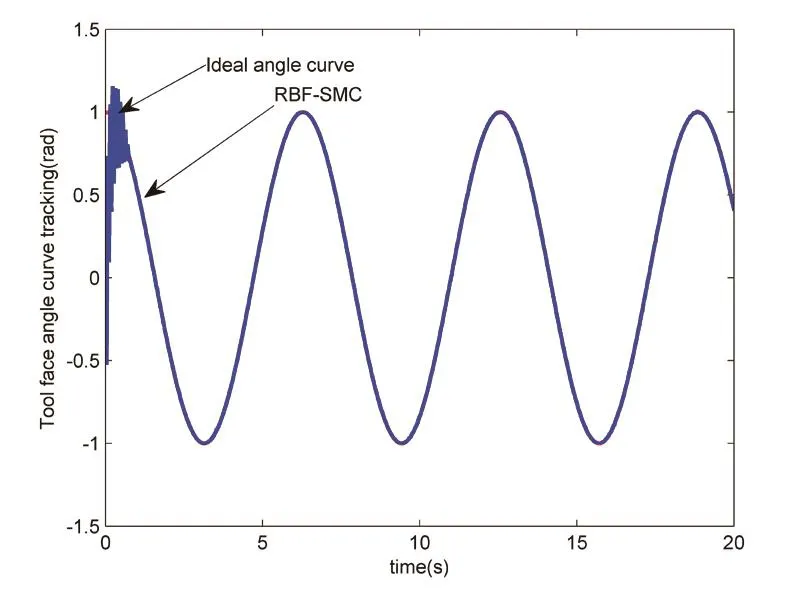
圖1 工具面角跟蹤曲線
3.仿真結果與分析
根據實驗測得的穩定平臺控制對象數據及對穩定平臺的參數辨識,使用Matlab/Simulink仿真工具,使用上述RBF神經網滑模變結構控制方法對旋轉導向鉆井穩定平臺控制系統進行仿真。
通過大量仿真實驗,得到下面的仿真結果。
從圖中可以看出,工具面角跟蹤效果快速、準確,能夠很好地達到控制要求。
4 結論
針對穩定平臺在井下工作特點,提出一種RBF神經網絡滑模變結構控制方法。該方法利用RBF神經網絡逼近穩定平臺數學模型,通過滑模變結構方法來增強系統魯棒性,并能夠保證控制系統的穩定性。仿真結構表明,該方法能夠抑制摩擦力矩對系統產生的不利影響,消除滑模變結構控制產生的抖振現象。使被控系統具有良好的魯棒性和較高的穩定平臺姿態控制精度,控制性能得到了極大的改善。
【參考文獻】
*[1]汪躍龍,王海皎,康思民等.導向鉆井穩定控制平臺的反饋線性化控制[J].石油學報,2014,35(5):952—957
*[2]霍愛清,賀昱曜,汪躍龍等.旋轉導向鉆井工具穩定平臺模糊滑模控制研究[J].計算機仿真,2010,27(10):152—155.
