
一種利用隱式曲線族的車輛違章檢測算法
2016-05-05 03:32:24馬麗文郭玉坤李金屏
西安電子科技大學學報 2016年2期
馬麗文,郭玉坤,李金屏
(1.濟南大學信息科學與工程學院,山東濟南 250022; 2.山東省網絡環境智能計算技術重點實驗室,山東濟南 250022)
?
一種利用隱式曲線族的車輛違章檢測算法
馬麗文1,2,郭玉坤1,2,李金屏1,2
(1.濟南大學信息科學與工程學院,山東濟南 250022; 2.山東省網絡環境智能計算技術重點實驗室,山東濟南 250022)
摘要:針對城市道路交通,提出了一種基于隱式曲線族的車輛違章檢測算法.隱式函數族用于描述道路上的各個不同區域.當檢測到車輛在不同道路區域之間行駛時,利用隱式函數族可以快速方便地判斷車輛所在區域.根據車輛行駛軌跡和隱式曲線族所描述的不同區域之間的位置關系,能夠快速準確地判定車輛是否違章以及所違反的交通規則.在實際檢測中,利用分段線性函數族來逼近各個隱式曲線,極大地提高了檢測效率,進而提高了違章判斷的準確性.實驗結果表明,當車輛出現違章時,可以實時顯示所違反的具體交通規則.
關鍵詞:智能交通;違章檢測;隱式曲線族;分段線性函數
在智能交通系統中,視頻監控技術得到了廣泛應用.目前,人們研究的焦點集中于車輛的檢測、識別、跟蹤、流量統計、交通疏導和違章檢測等方面.交通違章是發生交通事故的根源,常見的違章形式有闖紅燈、實線變道、逆向行駛等.檢測車輛違章的前提是準確地檢測到車輛并跟蹤其行駛軌跡.
人們利用了許多方案實現交通數據采集[1]、事件檢測[2-3]、違章抓拍以及違章車輛號牌識別[4-6].在車輛違章檢測方面,人們主要利用車輛行駛軌跡與車道線的關系判斷車輛是否違章,這方面的研究有:文獻[7]針對復雜的城市路口監控環境提出了車輛檢測與跟蹤算法,在判斷闖紅燈違章方面,主要是通過抓拍停止線前、上、后3張過程圖片,然后進行人工分揀圖片來判定違章;文獻[8]只對車輛的實線違章變道進行了檢測研究,其主要方法是通過跟蹤車輛軌跡和當前位置,結合其與初始所屬車道是否一致來判斷是否有違章行為發生,文中分析了6種違章變道情況,但是未對違章變道進行細分;文獻[9]通過建立十字路口的隱馬爾科夫模型對違章事件進行分類,判斷交通事故的嚴重程度;文獻[10]提出了一種車輛闖紅燈檢測與識別算法,即在停止線附近的檢測窗口內,利用車輛與停止線之間的位置關系,再結合信號燈的實際狀態,來判定車輛是否有闖紅燈違章行為,如果違章,則進行抓拍,顯然該文方法有較大的局限性,例如無法提供車輛與不同道路區域之間的位置關系,尚未考慮各種信號燈狀態下違章檢測的統一方案;文獻[11]針對車速提出了一種自動檢測違章框架,該框架集成了無線射頻識別(Radio Frequency IDentification,RFID)和車載自組網(Vehicle Ad hoc NETworks,VANETs)技術.
上述研究都沒有對不同的道路區域進行分析,尤其是沒有將不同區域之間的位置關系、車輛軌跡以及具體的信號燈相結合,無法提供車輛違章時所在的道路區域和違反的具體交通規則等信息.
對此,筆者提出了一種基于隱式曲線族的車輛違規檢測的統一解決方案.隱式曲線能夠方便地描述車輛所在的區域,易于判斷目標是否處于某個區域,并且根據隱式曲線所描述的不同道路區域的相互位置關系和相關車輛的行駛軌跡,很容易判斷車輛是否違章及違反的交通規則.在實際應用中,筆者利用分段線性判別函數對隱式曲線進行簡化.
1 模型的建立
汽車行駛時,駕駛員往往需要根據道路上的不同區域做出不同的駕駛動作.例如,在非路口路段的虛線車道,車輛允許變道;在靠近路口處的實線車道,車輛就不允許變道;當左轉彎和直行方向均為紅燈時,左轉彎和直行車輛必須停在停車線以內.因此,正確描述道路交通上的不同區域至關重要.
在一般情況下,道路上不應該存在檢測盲區,即道路上每個位置都只屬于一個區域.道路上的每個區域都可以用一個數學表達式來描述.隱式曲線是一個非常合適的數學描述形式,可以描述每個道路區域.
1.1 隱式曲線
隱式曲線是一種特殊的代數曲線,可以描述多種多樣的平面封閉區域.形式上,隱式曲線可以表示為f(x,y)=0,其實例集合可以稱為隱式曲線族,定義為

規定:當(x,y)在曲線之內、之外或者曲線上時,f(x,y)分別對應于大于零、小于零或者等于零的情況.其中(x,y)表示車輛當前的位置.
1.2 基于隱式曲線族的交通違章的判定
用隱式曲線族描述十字路口其中兩個路口的不同區域(圖1),圖1中1~3、5 ~7和11~16表示兩個雙向道路上的不同車道,4和10表示斑馬線區,8和9表示待轉區.于是,可以將十字路口的圖示區域劃分為16個不同區域,這些區域可以用一個隱式函數族F= { fi(x,y)=0 } (i=1,2,…,16)來描述.

圖1 路面上的兩個路口區域的示意圖
筆者主要介紹闖紅燈、實線變道兩種違章形式,其他違章形式,例如左拐彎違章等,可以依此類推.
闖紅燈也有多種形式,有直行紅燈、左轉彎紅燈情況下的直行和左轉彎闖紅燈,直行綠燈、左轉彎紅燈情況下的左轉彎闖紅燈和直行左轉彎闖紅燈等.可以用不同的符號表示不同類型的違章,例如Rule A(i)表示直行紅燈、左轉彎紅燈情況下的各種違章,Rule B(i)表示直行綠燈、左轉彎紅燈情況下的各種違章,Rule C(i)表示實線變道情況下的各種違章等.
對于直行紅燈、左轉彎紅燈情況下的車輛闖紅燈,判斷規則舉例如下:
Rule A(1):f1(x,y)>0→f4(x,y)>0 ,
Rule A(2):f2(x,y)>0→f4(x,y)>0 ,
Rule A(3):f3(x,y)>0→f4(x,y)>0 .
其中,(x,y)表示當前車輛所在位置,隱式曲線下標1、2、3分別表示相應車道;Rule A(i)表示A類違章中的某個具體規則,“→”表示從前者區域到后者區域.
需要說明的是,當最右邊車道3允許隨時右轉時,則Rule A(3)不成立,但該車道此時同樣不允許直行或者左轉彎.
其他規則可以依此類推.
2 模型的簡化與目標檢測
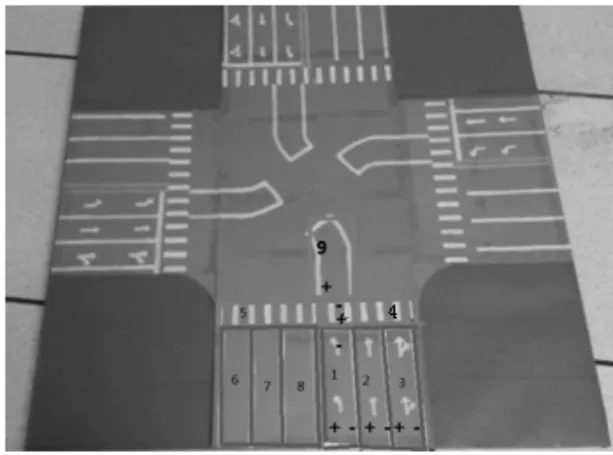
圖2 真實道路的模擬圖
2.1 模型的簡化
十字路口道路模擬圖如圖2所示,圖中標注的9個矩形框分別表示車道的不同區域.由于用隱式曲線族判斷車輛違規需要首先計算求解隱式曲線表達式,通常情況下計算繁瑣并且難以在實踐中進行推廣.在實際應用中,采用多個分段線性判決函數來對各個隱式曲線進行簡化近似.在圖2中,僅對區域1~4和區域9進行說明,其他區域可以進行類似處理.
區域1~4和區域9的局部放大示意圖如圖3所示.規定在直線y1(x)~y4(x)的右側為“+”,直線y5(x)~y8(x)的上方為“+”,于是在區域1 ~4和區域9內,直線y1(x)~y8(x)的正負號序列分別為“﹢------﹢”、“﹢﹢-----﹢”、“﹢﹢﹢----﹢”、“﹢??---﹢﹢”、“﹢----﹢﹢﹢”,其中“?”表示“﹢”和“-”皆可.由此可見,當直線方程確定之后,每個區域的正負號序列也是確定的.當檢測到車輛的位置時,將其位置坐標代入這8個直線方程,即可獲得一個正負號序列,由此可以判定車輛所在的具體區域.
在實際應用中,由于每個路口的槍式攝像頭是固定和靜止的,因此可以利用手動繪制直線的辦法獲得各個分段線性判決函數,具體繪制方法詳見3.2節.
為了判斷行駛的車輛是否違章,需要結合交通信號燈和某輛車在行駛過程中所經過不同道路區域的正負號序列變化情況來具體分析,下面舉例說明.
假設車輛的重心坐標為(x,y).在直行紅燈、左轉彎紅燈的情況下,車輛闖紅燈判斷規則如下:
Rule A(1):﹢------﹢ → ﹢??---﹢﹢ ,
Rule A(2):﹢﹢-----﹢ → ﹢??---﹢﹢ ,
Rule A(3):﹢﹢﹢----﹢ → ﹢??---﹢﹢ .
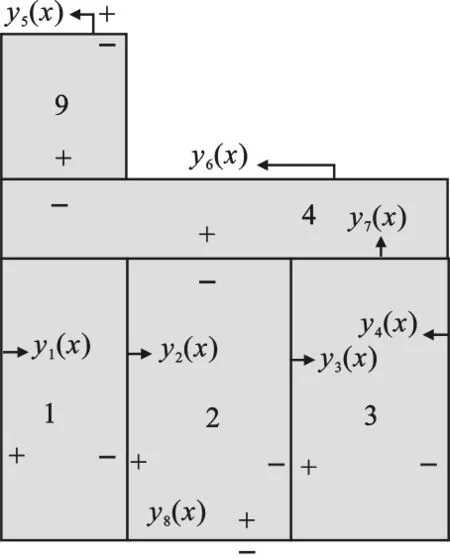
圖3 單行線模擬路口函數圖
2.2 目標檢測
利用高斯混合模型(Gaussian Mixture Model,GMM)進行背景建模和背景更新,詳細內容見文獻[12].
筆者所利用的視頻是在攝像機固定情況下拍攝的,因此可以利用背景差分的思想檢測車輛.原理如下:

其中,fk(i,j)是當前幀,Bk(i,j)是利用高斯混合模型得到的當前背景,Dk(i,j)是當前幀與當前背景經過比較得到的前景圖像.Θ表示當前幀與當前背景的比較,即如果當前幀(i,j)處的像素值fk(i,j)符合某一個高斯模型,則視為背景;否則,視為前景.
此時獲得的前景圖像中會存在一些噪聲,需要利用中值濾波和形態學方法消除噪聲,獲得比較干凈的前景目標.當Dk(i,j)中存在多個運動目標時,需要排除一些較小的非車輛目標.假設某個目標的面積為M,用V表示該目標是否是車輛,則利用下式進行判定:

其中,T表示面積閾值,閾值為100個像素.當檢測為車輛時,就為其分配一個編號,并根據當前幀車輛的重心位置和上一幀之間的差異來判斷是否是同一輛車,從而實現車輛的跟蹤,同時根據車輛編號,統計車流量.
3 算法實現及結果分析
3.1 算法流程
該系統可以同時處理多路交通視頻.對于每路視頻,通過點擊可以實現視頻窗口的放大(圖4(b)),進而在放大的視頻窗口內手工繪制路口道路上的各個區域,然后系統將自動利用高斯混合模型建立各個路口的背景模型,再通過中值濾波和形態學方法得到前景目標圖像,最終獲得車輛位置并判斷車輛是否違章.

圖4 視頻系統
具體算法流程如下:
第1步 獲取各路視頻流;
第2步 點擊一路視頻放大顯示窗口;
第3步 在放大的視頻窗口內根據實際道路標線手工繪制直線段并指定不同的道路區域,系統自動確定各個線段的表達式,并利用2.1節方法獲得各個道路區域內的正負號序列;
第4步 利用高斯混合模型進行背景建模和更新;
第5步 將當前幀與背景模型進行比較,獲得前景圖像;
第6步 對前景圖像進行預處理,包括中值濾波、膨脹和腐蝕等操作,消除其中噪聲進而獲得比較干凈的前景,然后對前景進行二值化;
第7步 計算前景中各個目標的重心和面積,若面積大于規定的閾值,則目標判定為車輛;
第8步 獲得目標車輛的行駛軌跡;
第9步 根據車輛的行駛軌跡和不同道路區域的正負號序列變化,并結合當前交通信號燈的實際情況,利用2.1節介紹的判斷規則判定當前車輛是否違章;
第10步 重復第4步至第9步,直到視頻結束.
3.2 繪制道路標線和確定道路區域
打開多路視頻后,系統顯示如圖4(a)所示,單擊其中一路視頻可以得到放大的視頻窗口,如圖4(b)所示.
為了確定道路上的不同區域,需要根據視頻中車道線、停止線、斑馬線等的實際分布狀況,在屏幕上利用鼠標手工繪制多條直線段來模擬不同的道路區域(圖4(c)~(d)).要求每條直線段要與實際的道路標線盡量重合.
在繪制每條直線段時,需要根據系統提示,確定一個起點和終點,系統將利用y=ax+b自動計算該直線段的各個參數,顯然每條直線段兩側的正負號就自動確定.當完成所有直線段的繪制并確認無誤后,通過操作面板開始指定道路上的不同區域,系統將利用每個直線段的參數方程自動計算每個區域的正負號序列.
3.3 實驗結果及分析
由于獲取路口的規范交通視頻不方便,筆者就在濟南二環東路和二環南路、北京某道路的過街天橋進行拍攝作為實驗視頻.拍攝時天氣為多云轉陰,其中繪制的車道標線模擬了真實路口的道路區域,因此檢測到的違章記錄會比較多.所錄制的視頻的分辨率均為640×480,計算平臺為Intel(R)Core(TM)i7@ 3.4 GHz、8 GB內存,操作系統為Win8,編譯環境是Visual Studio 2013.
圖5是其中一路的原始視頻和相應的前景圖像.由于車輛只能在道路上行駛,因此在計算過程中,只需要檢測不同道路區域內的車輛即可.這樣可以有效地避免非機動車道上的行人和非機動車等影響,還可以排除天空、白云等干擾.
圖6給出了其中一路視頻的任意兩個違章檢測圖.實際計算時,平均每幀的計算時間是8 ms.

圖5 視頻圖像

圖6 違章檢測圖
圖6中,灰色框內為顯示的交通信息,系統進行實時刷新并保存違章信息.對3個車道和1個斑馬線區域(即繪制的4個線段區域)內的車輛進行違章檢測,其中車輛編號14~17所在的道路區域分別為斑馬線區和一路口三車道、二車道、一車道.車輛編號都是系統自動實時標注的,而且一直跟隨行駛的車輛.由圖6可以看出,在檢測區內,每輛車都能被跟蹤上,并且按照車輛到達檢測區的先后順序,車輛編號遞增,即當前車輛編號的最大值為經過檢測區域的車輛總數.在圖6(a)中,1~13號車都已經過檢測區,車輛所在區域和違章信息都已經顯示,14號車進入了斑馬線區,灰色框內顯示“14號車一路口一車道闖紅燈”,15~17號車都已正確地顯示車輛所在區域.在圖6(b)中,14號、15號和17號車都已經過斑馬線區駛出檢測區,并且違章信息已正確顯示.16號車在斑馬線區,顯示“16號車一路口三車道闖紅燈”,而圖6(a)中,顯示“16號車從一路口二車道開過來了”,說明16號車從二車道越線到了三車道,16號車越線信息“16號車從一路口二車道越線到三車道”在圖6(b)中也顯示了.視頻中的其他違章分析車輛的信息也可以正確地顯示.統計一路視頻的車流量為148,其中4輛車由于被其他車輛遮擋未檢測到闖紅燈信息,2輛由于在行駛過程中被其他車輛遮擋未檢測到越線信息.漏檢率為算法未檢測到的違章車輛總數與實際違章總數的比值,誤報率為算法檢測到違章但車輛并未違章與違章總數的比值(文獻[10]的作者稱為虛報率).表1是筆者提出算法的檢測結果,表2是文獻[10]中的檢測結果.

表1 闖紅燈和實線變道檢測結果(多云轉陰)

表2 采用基于背景調整的更新算法情況下違章車輛檢測結果(多云轉陰)
筆者在拍攝時天氣是多云轉陰,因此陰影對車輛檢測產生的影響可以忽略.相對于文獻[10]的闖紅燈檢測結果,筆者提出算法的誤報率明顯低于10.26%;由于車輛遮擋,漏檢率相對較高.
需要特別說明,由于當前道路不是實際的交通路口,只是模擬各個車道和斑馬線區,并且設定的信號燈是紅燈狀態,因此顯示的違章信息比較多.
4 總 結
以上介紹了一種基于視頻監測的車輛違章檢測的統一解決方案.該方案利用隱式曲線族判定車輛所在區域,利用車輛行駛軌跡和不同道路區域之間的位置關系并結合交通信號燈的實際狀況來判定車輛是否違章和違反的交通規則.在具體實現過程中,首先道路劃分為多個互不重合的區域,每個區域可以用一條隱式曲線描述;然后利用分段線性函數集合來擬合各個隱式曲線,使得每個區域惟一對應于這些線性函數集合的一個正負號序列;當檢測到車輛時,根據車輛經過各個區域正負號序列的變化情況并結合信號燈的實際信號,就可以快速方便地檢測車輛是否違章.實驗結果表明,該方案操作簡單,有效實用,通用性強,并且具有良好的推廣應用能力.
由于筆者重點是介紹一種基于隱式曲線族的車輛違章檢測的方案,因此只針對白天多云轉陰的情況下進行了測試,沒有針對其他天氣狀況進行測試,沒有考慮到陰影、遮擋等影響.對于陰影、遮擋等問題,需要參考其他相關文獻,例如文獻[2];如果要進一步識別違章車輛的號牌,還需要進行車牌檢測、字符分割和識別等工作,此時可以參考文獻[4-6]等的工作.將這些工作進行集成,最終形成一套完整的、有效的智能車輛違章檢測系統,將是下一步要開展的工作.
參考文獻:
[1]SEMERTZIDIS T,DIMITROPOULOS K,KOUSIA A.et al.Video Sensor Network for Real-time Traffic Monitoring and Surveillance[J].Intelligent Transport Systems,2010,4(2):103-112.
[2]劉萬軍,陳虹宇,姚雪,等.利用七宮格的遮擋車輛凹性檢測與分割[J].中國圖象圖形學報,2014,19(1):45-53.LIU Wanjun,CHEN Hongyu,YAO Xue,et al.Detection and Segmentation of Occluded Vehicles Based on Seven Grids [J].Journal of Image and Graphics,2014,19(1):45-53.
[3]JARRAYA S K,GHRAB N B,HAMMAMI M,et al.Tracking Moving Objects in Road Traffic Sequences[C]// Lecture Notes in Computer Science:7340 LNCS.Heidelberg:Springer Verlage,2012:406-414.
[4]李金屏,王群,吳翔,等.基于視頻的車輛檢測和牌照識別[J].濟南大學學報(自然科學版),2014,28(2):89-96.LI Jinping,WANG Qun,WU Xiang,et al.Detection of Vehicle and Recognition of License Plate Based on Video[J].Journal of University of Jinan(Science and Technology),2014,28(2):89-96.
[5]DU S,IBRAHIM M,SHEHATA M,et al.Automatic License Plate Recognition(ALPR):a State-of-the-art Review [J].IEEE Transactions on Circuits and Systems for Video Technology,2013,23(2):311-325.
[6]AL-GHAILI A M,MASHOHOR S,RAMLI A R,et al.Vertical-edge-based Car-license-plate Detection Method[J].IEEE Transactions on Vehicular Technology,2013,62(1):26-38.
[7]張洪斌,黃山.面向城市路口的高清晰智能監控系統研究[J].四川大學學報(工程科學版),2012,44(1):224-228.ZHANG Hongbin,HUANG Shan.Research on the High Definition Intelligent Surveillance for Urban Intersection[J].Journal of Sichuan University(Engineering Science Edition),2012,44(1):224-228.
[8]劉振華,黃磊,劉昌平.一種基于視頻圖像處理的車輛違章檢測算法[J].公路交通科技,2012,29(2):106-114.LIU Zhenhua,HUANG Lei,LIU Changping.A Vehicle Violation Detection Algorithm Based on Video Image Processing[J].Journal of Highway and Transportation Research and Development,2012,29(2):106-114.
[9]AK?Z?,KARSLIGIL M E.Traffic Event Classification at Intersections Based on the Severity of Abnormality[J].Machine Vision and Applications,2014,25(3):613-632.
[10]佟守愚.基于視頻技術的交通違章檢測與識別理論及方法研究[D].長春:吉林大學,2006.
[11]OCHE M,NOOR R M,AL-JAWFI A S,et al.An Automatic Speed Violation Detection Framework for VANETs [C]//Proceedings of the IEEE International Conference on RFID-Technologies and Applications.Washington:IEEE Computer Society,2013:1-6.
[12]LI J P,LI J,HOU W D.Moving Object Tracking Based on Particle Filter and Its Application in Intelligent Transportation System[J].Journal of Pattern Recognition&Image Processing,2013,4(3):389-398.
(編輯:郭 華)
Traffic violation detection based on the implicit curves family
MA Liwen1,2,GUO Yukun1,2,LI Jinping1,2
(1.School of Information Science and Engineering,Univ.of Ji’nan,Ji’nan 250022,China;2.Shandong Provincial Key Lab.of Network Based Intelligent Computing,Ji’nan 250022,China)
Abstract:We propose an effective algorithm for the detection of the traffic violation vehicle by employing a set of implicit function curves which can be used to describe the different regions on the roads.When the vehicles are detected to run across different road regions,we can determine in which region that vehicle lies easily and immediately by using the set of implicit functions.According to the vehicle trajectory and the relationship among different regions described by the implicit functions,we can quickly and accurately determine whether the vehicle violates the traffic rules.In order to improve the detection efficiency and accuracy greatly,we use the piecewise linear functions to approximate the set of implicit functions in actual detection.Experimental results show that our algorithm can detect the traffic violation and display the specific violated traffic rules in real time.
Key Words:intelligent transportation;traffic violation detection;implicit curve family;piecewise linear functions
通訊作者:李金屏(1968-),男,教授,博士,E-mail:ise_lijp.ujn.edu.cn.
作者簡介:馬麗文(1988-),女,濟南大學碩士研究生,E-mail:1195289418@qq.com.
基金項目:國家自然科學基金青年基金資助項目(61203341);山東省高等學校科技計劃資助項目(J14LN15,J12LN19);濟南大學校基金重點資助項目(XKY1202)
收稿日期:2014-10-24 網絡出版時間:2015-05-21
doi:10.3969/j.issn.1001-2400.2016.02.024
中圖分類號:TP391.41
文獻標識碼:A
文章編號:1001-2400(2016)02-0139-06
網絡出版地址:http://www.cnki.net/kcms/detail/61.1076.TN.20150521.0902.021.html
