基于擴(kuò)展磁鏈的永磁同步牽引電機(jī)失磁在線監(jiān)測(cè)
2016-05-07 08:49:40羅意平張昌凡趙凱輝
鐵道學(xué)報(bào) 2016年2期
黃 剛,羅意平,張昌凡,趙凱輝
(1.中南大學(xué) 交通運(yùn)輸工程學(xué)院,湖南 長沙 410075;2.湖南工業(yè)大學(xué) 電氣與信息工程學(xué)院,湖南 株洲 412007)
永磁同步電機(jī)以其優(yōu)異性能和固有特點(diǎn)能夠滿足軌道車輛對(duì)動(dòng)力品質(zhì)、能耗和控制特性的要求[1-3]。德、法、日等國家已經(jīng)相繼研制出永磁同步電機(jī)的牽引傳動(dòng)系統(tǒng),我國株洲南車時(shí)代電氣股份有限公司也已完成了地鐵車輛永磁同步牽引系統(tǒng)的研制并在沈陽地鐵二號(hào)線進(jìn)行了裝車試驗(yàn)。永磁同步牽引系統(tǒng)已成為軌道交通牽引傳動(dòng)的未來發(fā)展方向[4,5]。然而由于我國幅員遼闊,列車運(yùn)行跨度大,永磁同步牽引電機(jī)易受外部磁場環(huán)境和溫度變化的影響導(dǎo)致永磁體失磁風(fēng)險(xiǎn),這將直接導(dǎo)致電機(jī)發(fā)熱和轉(zhuǎn)矩性能變差,甚至造成電機(jī)報(bào)廢,嚴(yán)重影響列車的安全運(yùn)行[6,7]。因此針對(duì)永磁同步牽引電機(jī)的失磁進(jìn)行預(yù)防,降低發(fā)生失磁的風(fēng)險(xiǎn),具有重要的意義。
針對(duì)永磁同步電機(jī)的失磁和磁性能波動(dòng)問題,國內(nèi)外許多專家學(xué)者進(jìn)行了廣泛深入地研究。文獻(xiàn)[8]針對(duì)不同工作狀態(tài)的磁體在交變磁場作用下表面磁感應(yīng)強(qiáng)度隨時(shí)間的變化進(jìn)行了研究,這是從優(yōu)化磁路結(jié)構(gòu)的電機(jī)設(shè)計(jì)角度出發(fā)去降低失磁風(fēng)險(xiǎn)的靜態(tài)預(yù)防方法。文獻(xiàn)[9]針對(duì)90 kW車用永磁牽引電機(jī),利用有限元仿真方法對(duì)永磁體工作點(diǎn)進(jìn)行了檢測(cè),這是一種發(fā)生失磁后的離線檢測(cè),此時(shí)電機(jī)很可能已經(jīng)損壞。因此采用適用的現(xiàn)代控制理論對(duì)失磁故障進(jìn)行在線檢測(cè)是十分有必要的。文獻(xiàn)[10]提出一種單相永磁同步電機(jī)不可逆失磁狀況的預(yù)估方法,但需要知道電機(jī)的定轉(zhuǎn)子結(jié)構(gòu)和永磁體的材料特性。文獻(xiàn)[11]把改進(jìn)的反電勢(shì)方法用于永磁體磁鏈的在線估計(jì),但只能估計(jì)固定方向磁鏈幅值的波動(dòng)。文獻(xiàn)[12] 針對(duì)隱極式永磁同步電機(jī)提出了基于卡爾曼濾波器的永磁體磁場在線監(jiān)測(cè)方法,但由于卡爾曼濾波器在實(shí)際應(yīng)用中存在建模誤差及模型線性化和離散化過程中的量化誤差,限制了其實(shí)際工程應(yīng)用。文獻(xiàn)[13]提出一種基于雙觀測(cè)器的內(nèi)置式永磁同步電機(jī)失磁故障檢測(cè)方法,但其是在速度閉環(huán)控制且負(fù)載轉(zhuǎn)矩小的情況下實(shí)現(xiàn)的,不能直接應(yīng)用到轉(zhuǎn)矩閉環(huán)的大負(fù)載轉(zhuǎn)矩的牽引傳動(dòng)系統(tǒng)中去。
本文針對(duì)內(nèi)置式永磁同步電機(jī)轉(zhuǎn)矩閉環(huán)控制系統(tǒng),結(jié)合對(duì)系統(tǒng)參數(shù)攝動(dòng)、外界擾動(dòng)及數(shù)學(xué)模型不準(zhǔn)確具有很好魯棒性的滑模變結(jié)構(gòu)控制方法[14,15],設(shè)計(jì)了一種基于擴(kuò)展磁鏈的滑模觀測(cè)器,用于對(duì)永磁同步電機(jī)轉(zhuǎn)矩閉環(huán)控制系統(tǒng)的反饋轉(zhuǎn)矩和永磁體磁鏈進(jìn)行在線計(jì)算和檢測(cè)。仿真結(jié)果表明,該觀測(cè)器可準(zhǔn)確在線動(dòng)態(tài)檢測(cè)轉(zhuǎn)子磁鏈信息和反饋轉(zhuǎn)矩,具有較高的觀測(cè)精度。結(jié)合RT-LAB和真實(shí)的DSP電機(jī)控制器搭建硬件在環(huán)仿真試驗(yàn)系統(tǒng),通過試驗(yàn)驗(yàn)證了所提方法的有效性和實(shí)時(shí)性。
1 PMSM數(shù)學(xué)模型
按轉(zhuǎn)子磁鏈定向的dq坐標(biāo)系下PMSM數(shù)學(xué)模型可描述為
( 1 )
dq坐標(biāo)系中的磁鏈方程為
( 2 )
式中:Rs為定子繞組電阻;Ld、Lq分別為定子繞組的d、q軸電感;ud、uq分別為定子繞組的d、q軸電壓;id、iq分別為定子繞組的d、q軸電流;Ψr為轉(zhuǎn)子永磁體磁鏈;Ψd、Ψq分別為定子繞組的d、q軸磁鏈分量;ω為轉(zhuǎn)子電角速度;np為轉(zhuǎn)子磁極對(duì)數(shù);D為微分算子。
當(dāng)永磁電機(jī)由于種種原因發(fā)生永磁體失磁故障時(shí),永磁體磁鏈幅值和方向發(fā)生變化,如圖1所示。
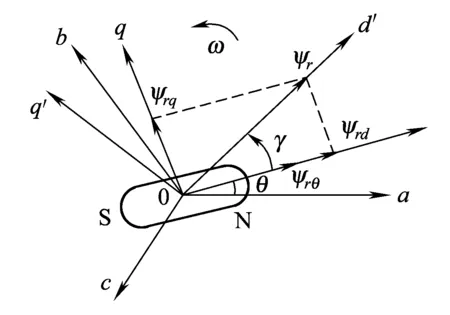
圖1 內(nèi)置式永磁同步電機(jī)永磁體磁鏈的變化
dq坐標(biāo)系中的磁鏈方程變?yōu)?/p>
( 3 )
式中:Ψrd、Ψrq分別為永磁體磁鏈在dq坐標(biāo)系下產(chǎn)生的新的磁鏈分量。
把式( 3 )代入式( 1 ),并考慮實(shí)際系統(tǒng)中DΨrd≈0、DΨrq≈0,可得發(fā)生永磁體失磁故障時(shí)的dq坐標(biāo)系下電壓方程為
( 4 )
由式( 1 )進(jìn)行坐標(biāo)逆變換得其在αβ坐標(biāo)系下電壓方程為
( 5 )
式中:L1=(Ld+Lq)/2;L2=(Ld-Lq)/2;uα、uβ分別為定子繞組的α、β軸電壓;iα、iβ分別為定子繞組的α、β軸電流;Ψr為轉(zhuǎn)子永磁體磁鏈;θ為轉(zhuǎn)子電角度。式中帶有2θ的項(xiàng)顯示了內(nèi)置式永磁同步電機(jī)的凸極特性,對(duì)永磁同步電機(jī)的觀測(cè)產(chǎn)生了諸多不便。
為了克服內(nèi)置式永磁同步電機(jī)的凸極特性對(duì)磁鏈觀測(cè)的不利影響,對(duì)發(fā)生永磁體失磁故障時(shí)的dq坐標(biāo)系下電壓方程式( 4 )進(jìn)行重構(gòu)。

( 6 )
式( 6 )中,第2項(xiàng)即為dq坐標(biāo)系下的擴(kuò)展磁鏈項(xiàng),且電壓方程中的電感矩陣為對(duì)稱矩陣,僅包含Rs和Lq。對(duì)式( 6 )進(jìn)行坐標(biāo)逆變換,可求得發(fā)生永磁體失磁故障時(shí)αβ坐標(biāo)系下的定子電壓方程為
( 7 )

( 8 )
可得
uαβ=Rsiαβ+DLqiαβ+DΨαβ
( 9 )
并有
DΨαβ=ωJΨαβ
(10)
其電磁轉(zhuǎn)矩表達(dá)式為
(11)
2 滑模狀態(tài)觀測(cè)器設(shè)計(jì)及轉(zhuǎn)矩和永磁體失磁磁鏈重構(gòu)
根據(jù)式( 9 )和式(10)構(gòu)建以擴(kuò)展磁鏈為狀態(tài)變量的狀態(tài)空間表達(dá)式[16]。
(12)
式中:y為輸出向量。構(gòu)建擴(kuò)展磁鏈滑模狀態(tài)觀測(cè)器。
(13)

=-ωe2-k1|e1|sgn(e1)
(14)
=ωe1-k2|e2|sgn(e2)
(15)
選取適當(dāng)?shù)膋1和k2,可保證式(14)和式(15)確定的觀測(cè)器誤差方程收斂到零。
證明:選取Lyapunov函數(shù)為
(16)
對(duì)式(16)求導(dǎo)并代入式(14)和式(15),可得
(17)
根據(jù)Lyapunov穩(wěn)定性理論,所設(shè)計(jì)的滑模觀測(cè)器漸進(jìn)穩(wěn)定。據(jù)此,系統(tǒng)狀態(tài)達(dá)到滑模面后有e=0,可得
(18)
對(duì)式(18)進(jìn)行移項(xiàng)整理并進(jìn)行積分可得基于定子電壓模型的定子磁鏈觀測(cè)值為
(19)
將式(19)代入式(11)可得轉(zhuǎn)矩的觀測(cè)值為
(20)
盡管擴(kuò)展磁鏈的觀測(cè)會(huì)受到交軸電感的影響,但研究發(fā)現(xiàn)通過本文方案觀測(cè)到的定子磁鏈卻不受交直軸電感的影響,式(19)獲得的定子磁鏈既保留了電壓模型法計(jì)算定子磁鏈的參數(shù)魯棒性,又克服了直接電壓模型的純積分問題。即由式(20)確定的轉(zhuǎn)矩觀測(cè)值也不受交直軸電感的影響,進(jìn)而確保了轉(zhuǎn)矩觀測(cè)的準(zhǔn)確性[16]。常規(guī)的轉(zhuǎn)矩控制方式是根據(jù)PMSM在同步旋轉(zhuǎn)坐標(biāo)系下電磁轉(zhuǎn)矩公式開環(huán)計(jì)算出電流指令,并通過電流閉環(huán)控制實(shí)現(xiàn)對(duì)電流指令的跟蹤。這種方法需要用到轉(zhuǎn)子永磁體磁鏈等電機(jī)參數(shù),而這些參數(shù)的變化會(huì)造成依據(jù)所接收到的轉(zhuǎn)矩指令計(jì)算出的電流指令偏離實(shí)際需要值,難以保證轉(zhuǎn)矩控制精度。而由式(20)確定的轉(zhuǎn)矩觀測(cè)式不包含永磁體磁鏈等信息,因此本文轉(zhuǎn)矩觀測(cè)亦不受轉(zhuǎn)子磁鏈變化的影響。
由系統(tǒng)狀態(tài)達(dá)到滑模面后和e=0式( 8 )可得發(fā)生失磁故障時(shí)等效的轉(zhuǎn)子永磁體磁鏈dq軸分量為
(21)
3 仿真與分析
綜合以上分析和設(shè)計(jì),基于擴(kuò)展磁鏈的內(nèi)置式永磁同步電機(jī)轉(zhuǎn)矩閉環(huán)控制系統(tǒng)如圖2所示。
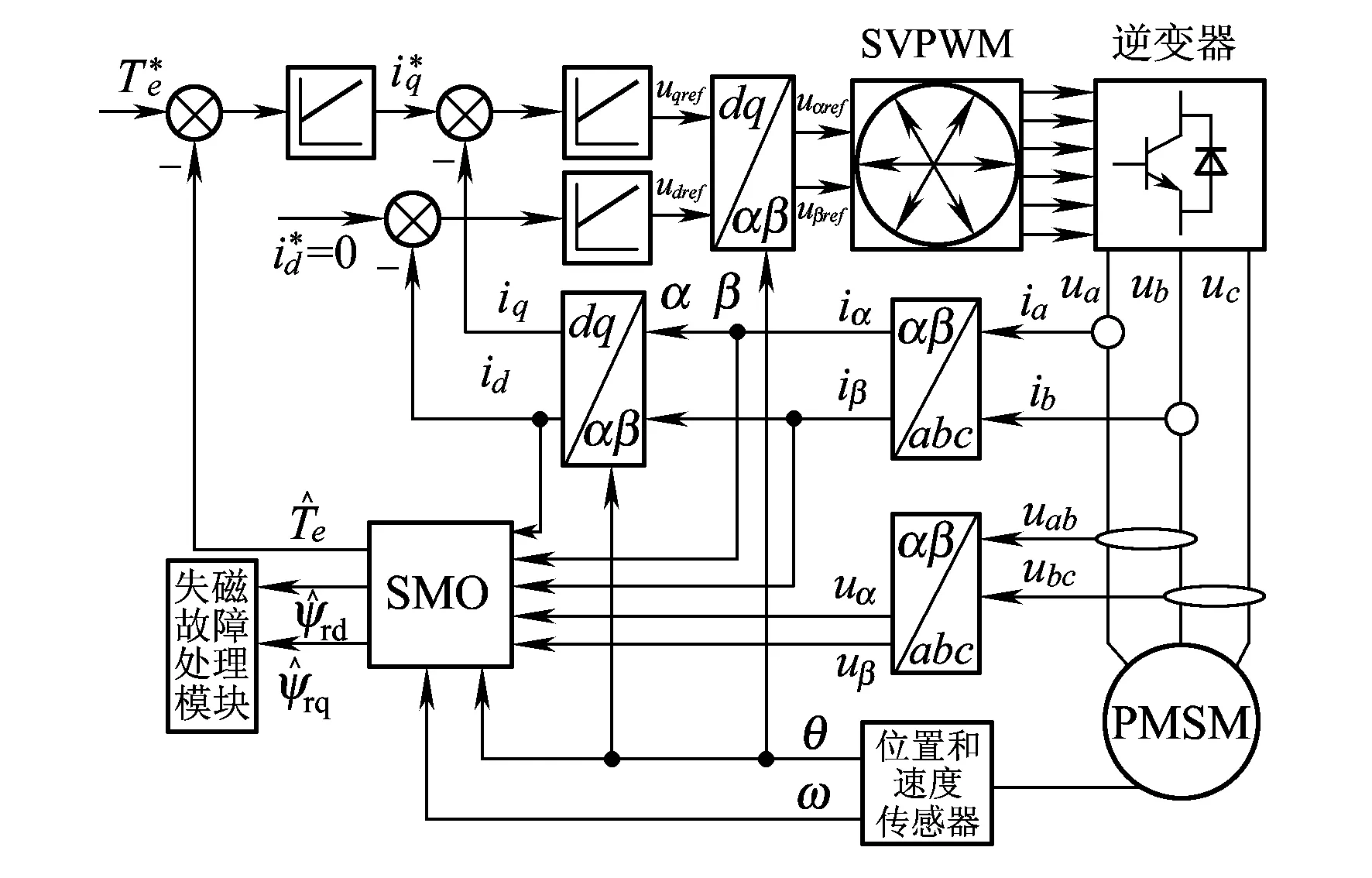
圖2 基于擴(kuò)展磁鏈滑模觀測(cè)器的轉(zhuǎn)矩閉環(huán)控制

仿真所用內(nèi)置式永磁同步電機(jī)參數(shù)見表1。為了減少滑模的抖動(dòng),仿真時(shí)采用連續(xù)函數(shù)代替符號(hào)函數(shù)sgn(·)。

表1 內(nèi)置式永磁同步電機(jī)參數(shù)
因牽引電機(jī)運(yùn)行中實(shí)際失磁動(dòng)態(tài)變化過程很難模擬,所以仿真系統(tǒng)中采取設(shè)置磁鏈幅值初始值偏差和位置偏差的方法來模擬永磁體磁鏈幅值和方向的變化,這兩種情況下磁鏈觀測(cè)過程是一樣的,所以可以用來驗(yàn)證本方法的有效性。
為驗(yàn)證所設(shè)計(jì)觀測(cè)器的魯棒性,設(shè)置轉(zhuǎn)速初始值為200 rad/s,0.1 s增加為400 rad/s;定子電阻初始值為0.02 Ω,在0.2 s增加為0.04 Ω;轉(zhuǎn)矩給定為500 Nm,在0.3 s時(shí)增加為1 000 Nm。分3種情況進(jìn)行討論。
3.1 無失磁時(shí)
仿真結(jié)果如圖3~圖7所示。
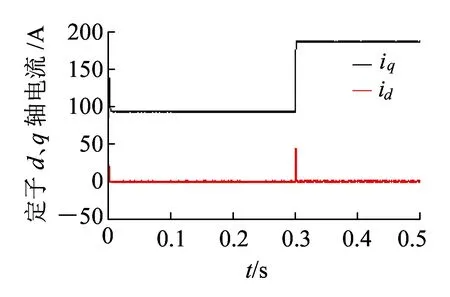
圖3 定子d、q軸電流
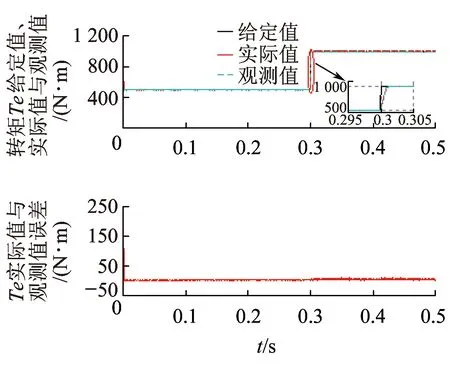
圖4 轉(zhuǎn)矩給定值、實(shí)際值、觀測(cè)值及觀測(cè)誤差
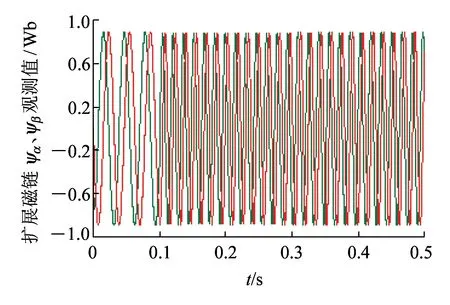
圖5 擴(kuò)展磁鏈觀測(cè)值
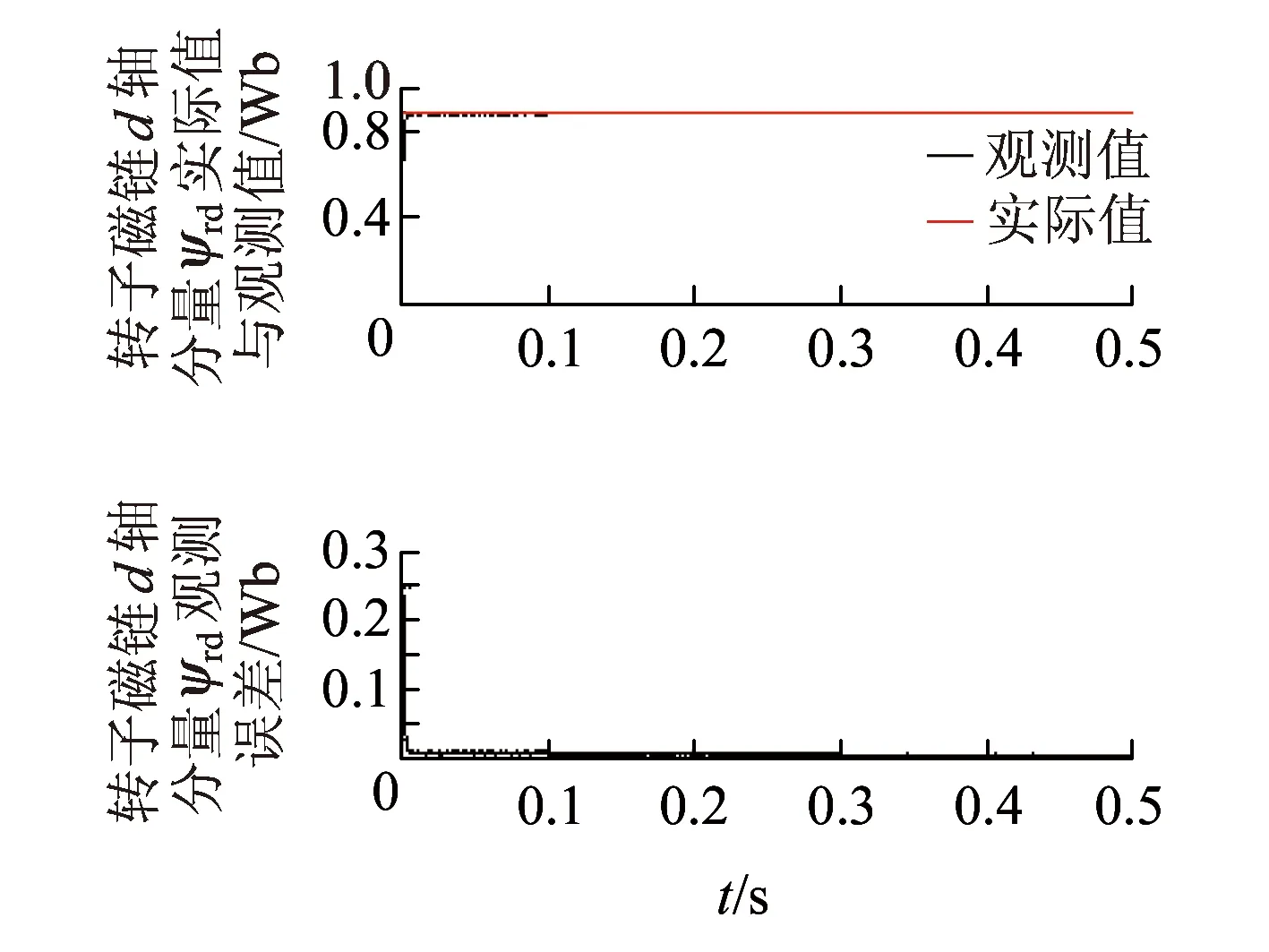
圖6 d軸轉(zhuǎn)子磁鏈的實(shí)際值、觀測(cè)值及觀測(cè)誤差
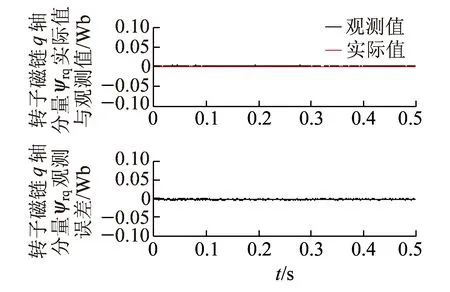
圖7 q軸轉(zhuǎn)子磁鏈的實(shí)際值、觀測(cè)值及觀測(cè)誤差
圖3為定子d、q軸電流波形,在0.3 s由于轉(zhuǎn)矩增大,q軸電流變大,d軸電流跳變后迅速恢復(fù)到零;圖4為轉(zhuǎn)矩給定值、實(shí)際值、觀測(cè)值及觀測(cè)誤差波形;圖5為擴(kuò)展磁鏈觀測(cè)值波形,由于在0.1 s轉(zhuǎn)速變大而使電角速度頻率變大;圖6和圖7分別為d、q軸轉(zhuǎn)子磁鏈的實(shí)際值、觀測(cè)值及觀測(cè)誤差波形。從圖中波形可知,轉(zhuǎn)矩及永磁體磁鏈的觀測(cè)對(duì)定子電阻、轉(zhuǎn)速及轉(zhuǎn)矩等參數(shù)變化不敏感,系統(tǒng)魯棒性強(qiáng),轉(zhuǎn)矩及轉(zhuǎn)子d、q軸磁鏈觀測(cè)值可以迅速跟蹤其給定值或?qū)嶋H值,觀測(cè)精度高。
3.2 發(fā)生幅值失磁時(shí)
其他條件不變,假設(shè)在0.4 s時(shí),轉(zhuǎn)子磁鏈幅值由0.892 Wb變?yōu)?.7 Wb。仿真結(jié)果如圖8~圖12所示。
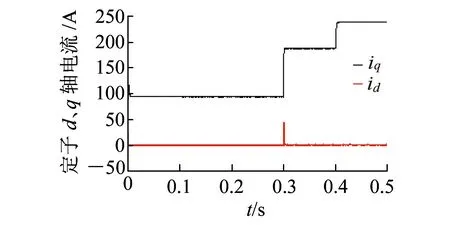
圖8 定子d、q軸電流
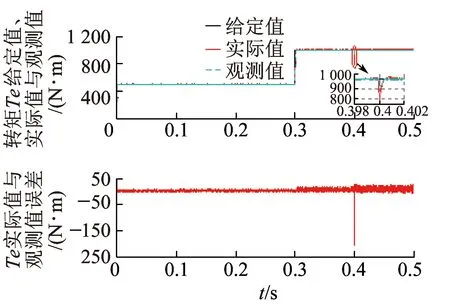
圖9 轉(zhuǎn)矩給定值、實(shí)際值、觀測(cè)值及觀測(cè)誤差
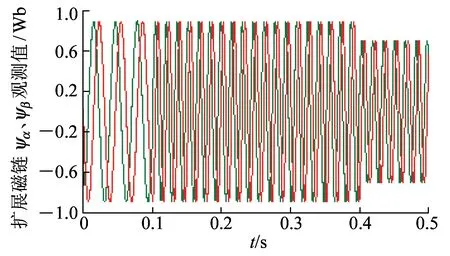
圖10 擴(kuò)展磁鏈觀測(cè)值
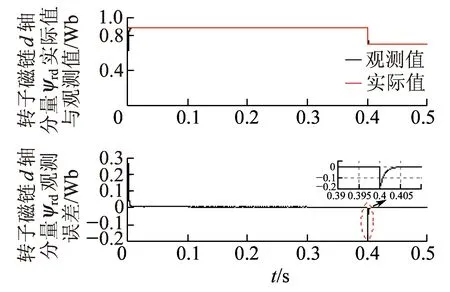
圖11 d軸轉(zhuǎn)子磁鏈的實(shí)際值、觀測(cè)值及觀測(cè)誤差
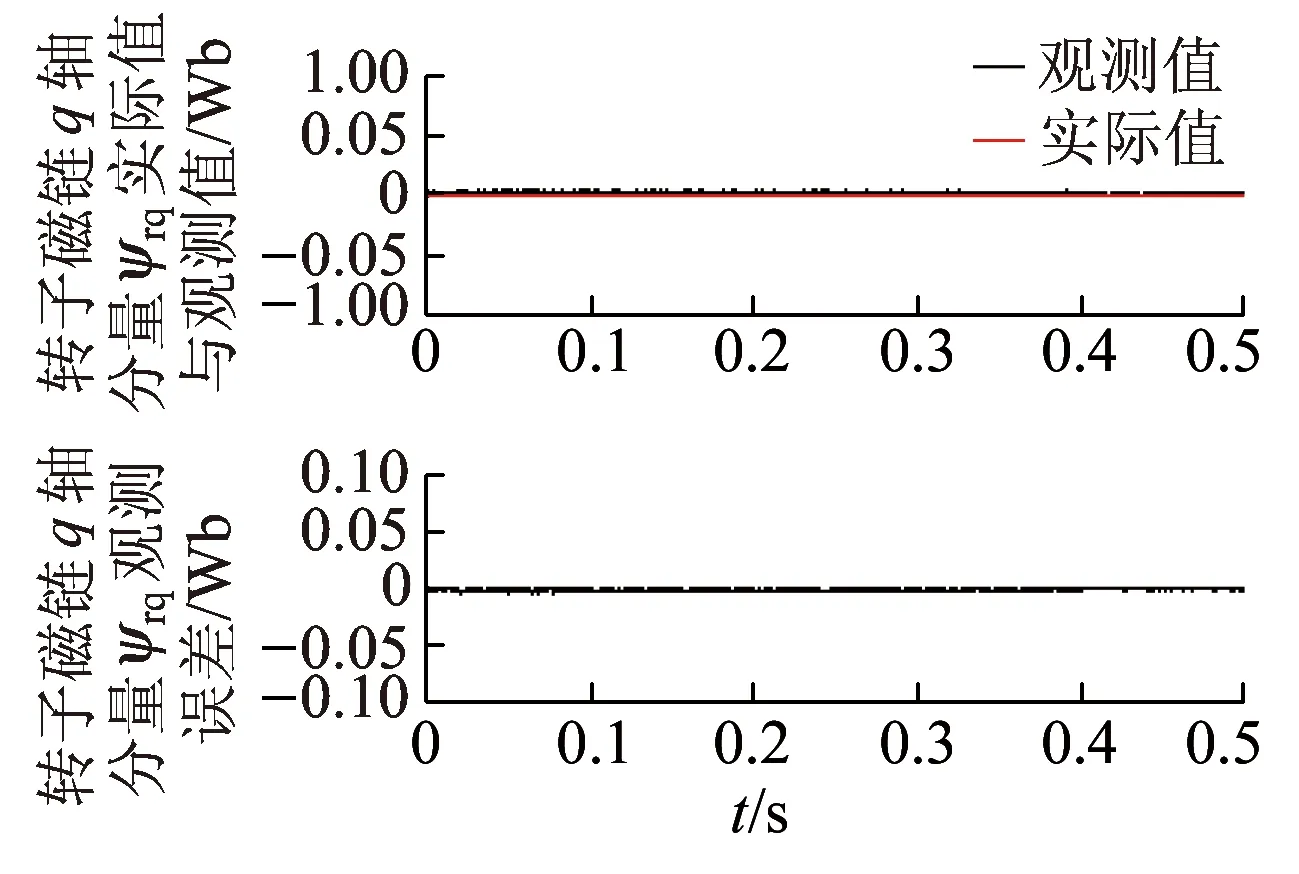
圖12 q軸轉(zhuǎn)子磁鏈的實(shí)際值、觀測(cè)值及觀測(cè)誤差
圖8為定子d、q軸電流波形,從圖8可知定子q軸電流由于在0.4 s發(fā)生幅值失磁而變大;圖9為轉(zhuǎn)矩給定值、實(shí)際值、觀測(cè)值及觀測(cè)誤差波形,剛發(fā)生幅值失磁時(shí)觀測(cè)值有波動(dòng),但能很快跟蹤給定值;圖10為擴(kuò)展磁鏈觀測(cè)值波形,由于在0.4 s發(fā)生幅值失磁而變小;圖11和圖12分別為d、q軸轉(zhuǎn)子磁鏈的實(shí)際值、觀測(cè)值及觀測(cè)誤差波形,幅值失磁導(dǎo)致磁鏈d軸分量減小,q軸分量不變,磁鏈觀測(cè)值可以迅速跟蹤相應(yīng)的實(shí)際值。
3.3 同時(shí)發(fā)生幅值失磁和角度失磁時(shí)
其他條件不變,為方便觀察,假設(shè)在0.4 s時(shí),轉(zhuǎn)子磁鏈幅值由0.892 Wb變?yōu)?.7 Wb,在0.45 s時(shí),轉(zhuǎn)子磁鏈位置偏差由0°變?yōu)?0°。圖13為定子d、q軸電流波形,從圖13可知在發(fā)生幅值失磁和角度失磁時(shí),定子q軸電流均變大;圖14為轉(zhuǎn)矩給定值、實(shí)際值、觀測(cè)值及觀測(cè)誤差波形,在剛發(fā)生失磁時(shí)觀測(cè)值有小的波動(dòng),但亦能迅速跟蹤給定值;圖15為擴(kuò)展磁鏈觀測(cè)值波形,從波形可知由于幅值失磁導(dǎo)致擴(kuò)展磁鏈變小,而角度失磁對(duì)擴(kuò)展磁鏈的大小沒有影響;圖16和圖17分別為d、q軸轉(zhuǎn)子磁鏈的實(shí)際值、觀測(cè)值及觀測(cè)誤差波形,從圖中可知磁鏈觀測(cè)值能迅速跟蹤相應(yīng)的實(shí)際值。
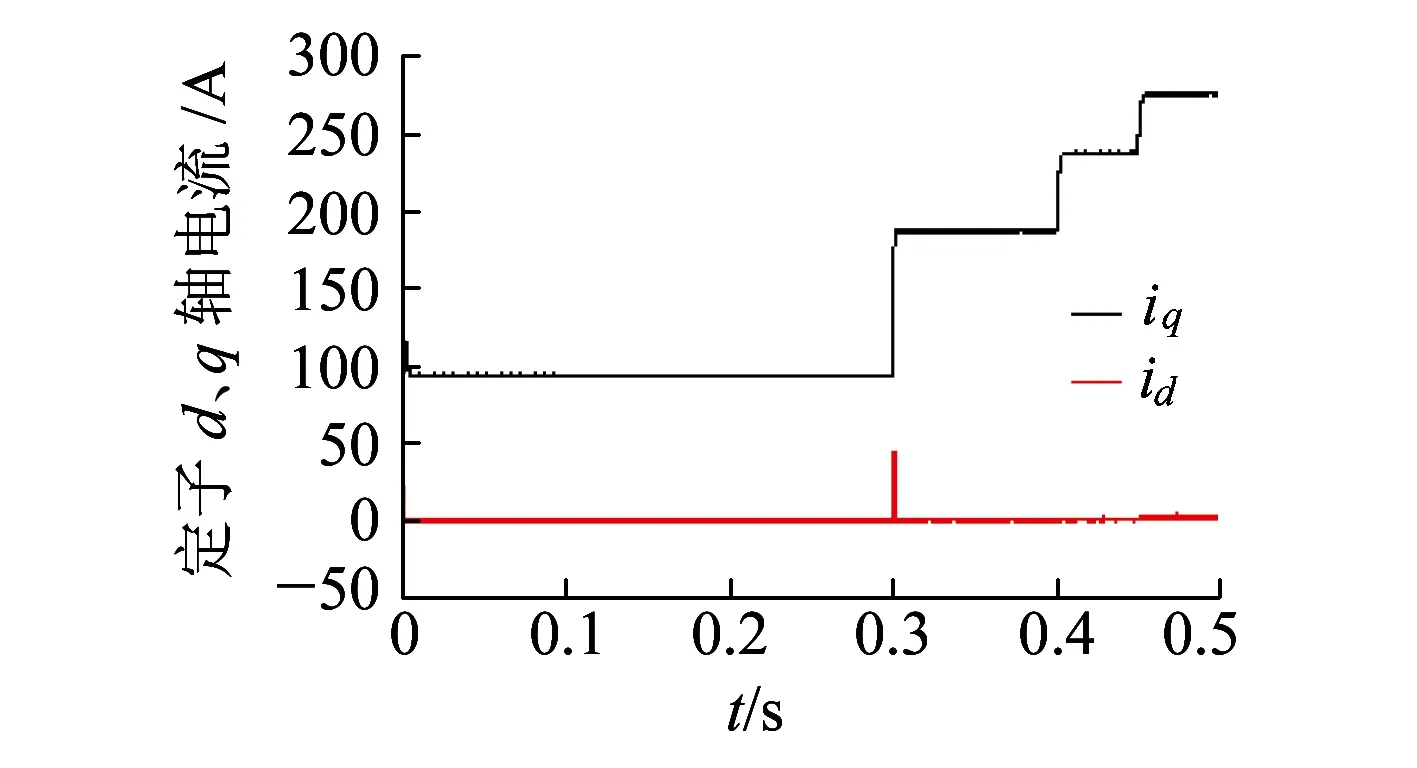
圖13 定子d、q軸電流

圖14 轉(zhuǎn)矩給定值、實(shí)際值、觀測(cè)值及觀測(cè)誤差
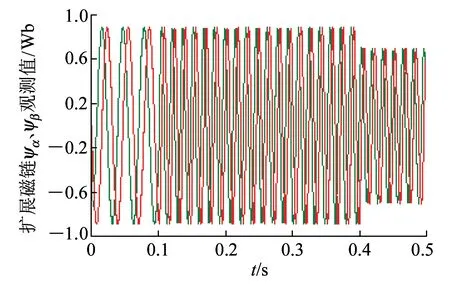
圖15 擴(kuò)展磁鏈觀測(cè)值

圖16 d軸轉(zhuǎn)子磁鏈的實(shí)際值、觀測(cè)值及觀測(cè)誤差

圖17 q軸轉(zhuǎn)子磁鏈的實(shí)際值、觀測(cè)值及觀測(cè)誤差
通過仿真及分析充分驗(yàn)證了所設(shè)計(jì)的基于擴(kuò)展磁鏈的自適應(yīng)滑模觀測(cè)器的跟蹤性能優(yōu)良,觀測(cè)精度高,對(duì)系統(tǒng)參數(shù)變化具有魯棒性。
4 硬件在環(huán)試驗(yàn)及結(jié)果
為了驗(yàn)證所設(shè)計(jì)的在線監(jiān)測(cè)方法,搭建RT-LAB硬件在環(huán)仿真測(cè)試系統(tǒng)。RT-LAB是由加拿大Opal-RT公司開發(fā)的一套模塊化的實(shí)時(shí)仿真平臺(tái),可以直接應(yīng)用MATLAB建立的動(dòng)態(tài)數(shù)學(xué)模型應(yīng)用于實(shí)時(shí)仿真、控制、測(cè)試及其他相關(guān)領(lǐng)域。圖18為永磁同步電機(jī)控制系統(tǒng)RT-LAB硬件在環(huán)配置圖。包括DSP控制器TMS320F2812以及RT-LAB OP5600實(shí)時(shí)仿真模型(逆變器和永磁同步電機(jī))。將控制對(duì)象永磁同步電機(jī)及逆變器模型編譯下載到OP5600中,并將設(shè)計(jì)的控制器模型生成C代碼下載到DSP控制器中,通過采集電機(jī)電流和位置等模擬輸出信號(hào),并將模擬信號(hào)轉(zhuǎn)換為±10 V范圍內(nèi)的信號(hào),采集實(shí)時(shí)模型輸出轉(zhuǎn)換后的信號(hào)并完成相應(yīng)的控制算法后,輸出6路PWM脈沖給實(shí)時(shí)仿真模型,即可實(shí)現(xiàn)永磁同步電機(jī)控制的硬件在環(huán)仿真。仿真中PWM載波頻率設(shè)為5 kHz,采樣周期設(shè)為20 μs,電機(jī)參數(shù)設(shè)定同表1。
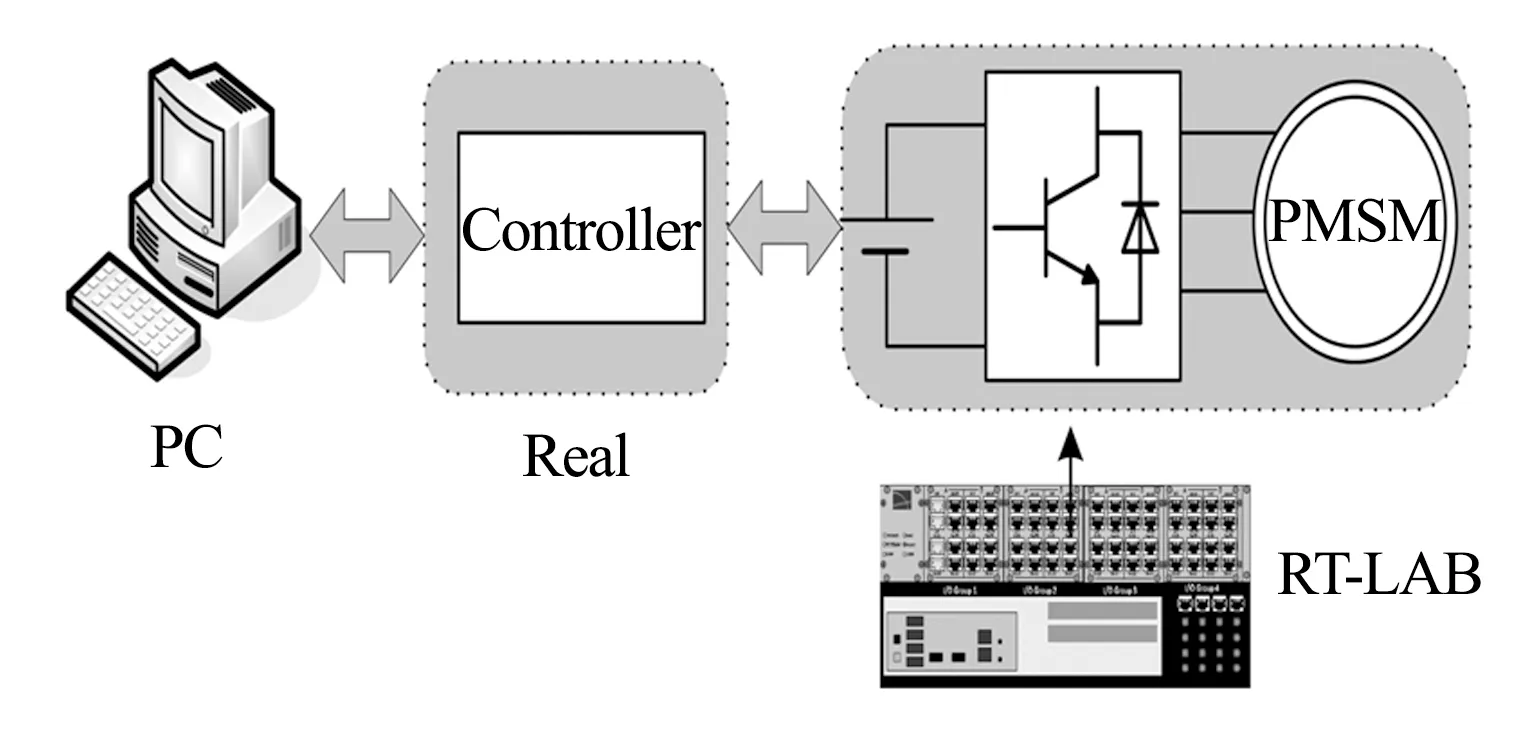
圖18 RT-LAB硬件在環(huán)系統(tǒng)
圖19和圖20為無失磁情況下定子d、q軸實(shí)際電流、轉(zhuǎn)矩實(shí)際值及觀測(cè)值和d、q軸轉(zhuǎn)子磁鏈觀測(cè)值;圖21和圖22為幅值失磁情況下定子d、q軸實(shí)際電流、轉(zhuǎn)矩實(shí)際值及觀測(cè)值和d、q軸轉(zhuǎn)子磁鏈觀測(cè)值;圖23和圖24為幅值和角度均失磁情況下定子d、q軸實(shí)際電流、轉(zhuǎn)矩實(shí)際值及觀測(cè)值和d、q軸轉(zhuǎn)子磁鏈觀測(cè)值。
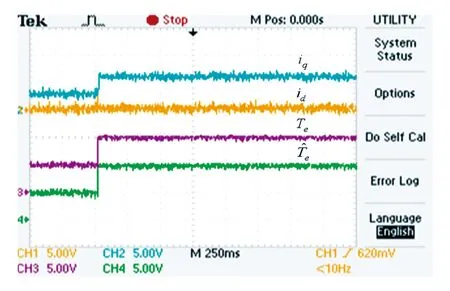
圖19 定子d、q軸電流及轉(zhuǎn)矩實(shí)際值和觀測(cè)值(電流:150 A/div;轉(zhuǎn)矩:500 Nm/div;t:250 ms/div)
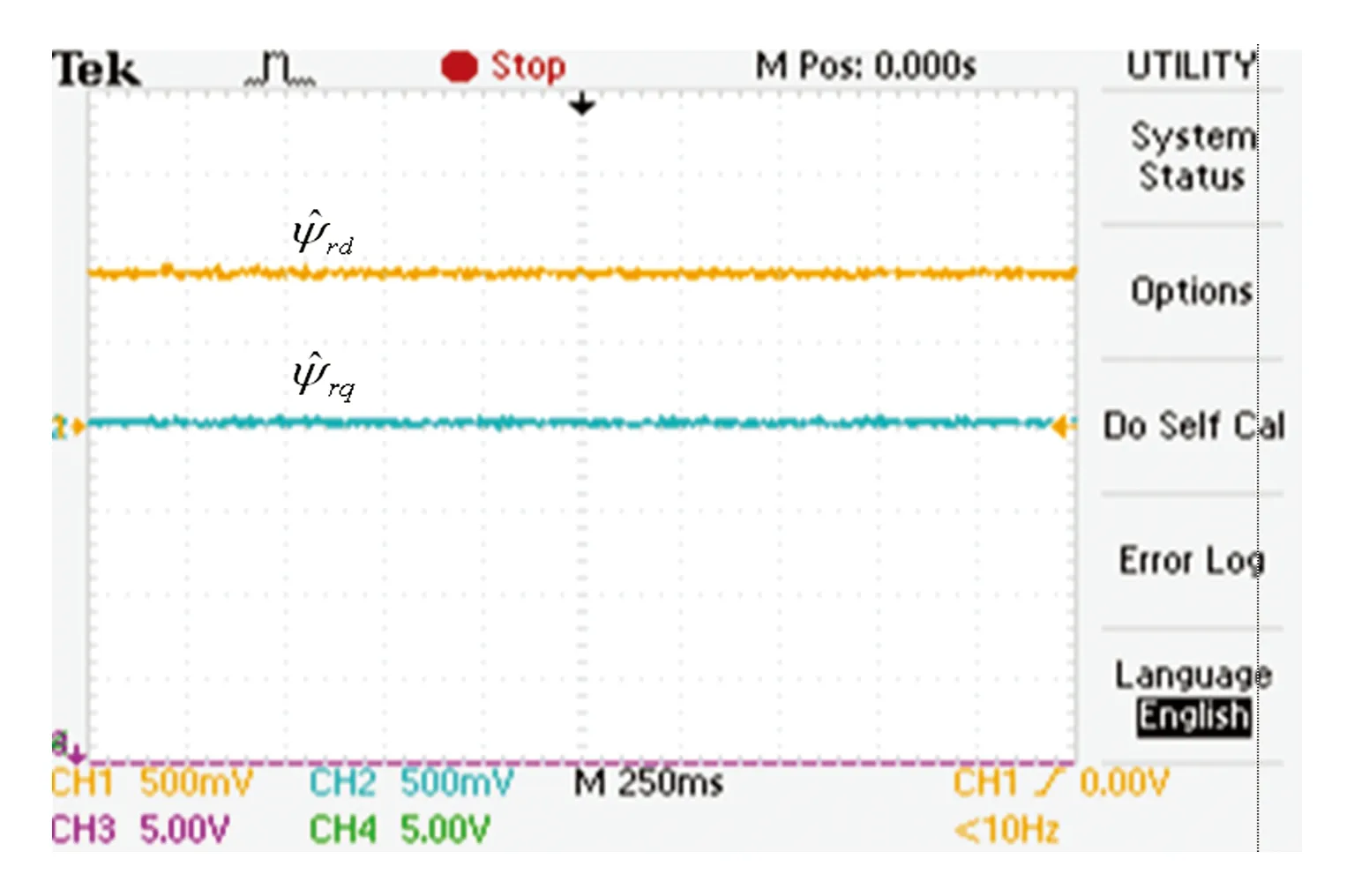
圖20 d、q軸轉(zhuǎn)子磁鏈觀測(cè)值(磁鏈:0.5 Wb/div;t:250 ms/div)
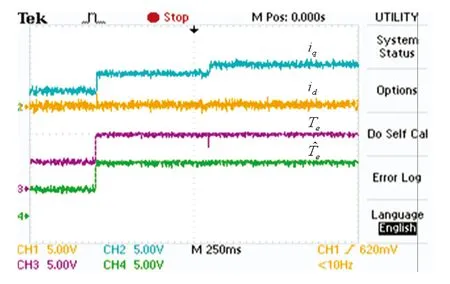
圖21 定子d、q軸電流及轉(zhuǎn)矩實(shí)際值和觀測(cè)值(電流:150 A/div;轉(zhuǎn)矩:500 Nm/div;t:250 ms/div)
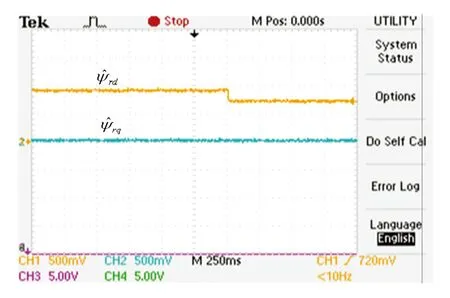
圖22 d、q軸轉(zhuǎn)子磁鏈觀測(cè)值(磁鏈:0.5 Wb/div;t:250 ms/div)

圖23 定子d、q軸電流及轉(zhuǎn)矩實(shí)際值和觀測(cè)值(電流:150 A/div;轉(zhuǎn)矩:500 Nm/div;t:250 ms/div)
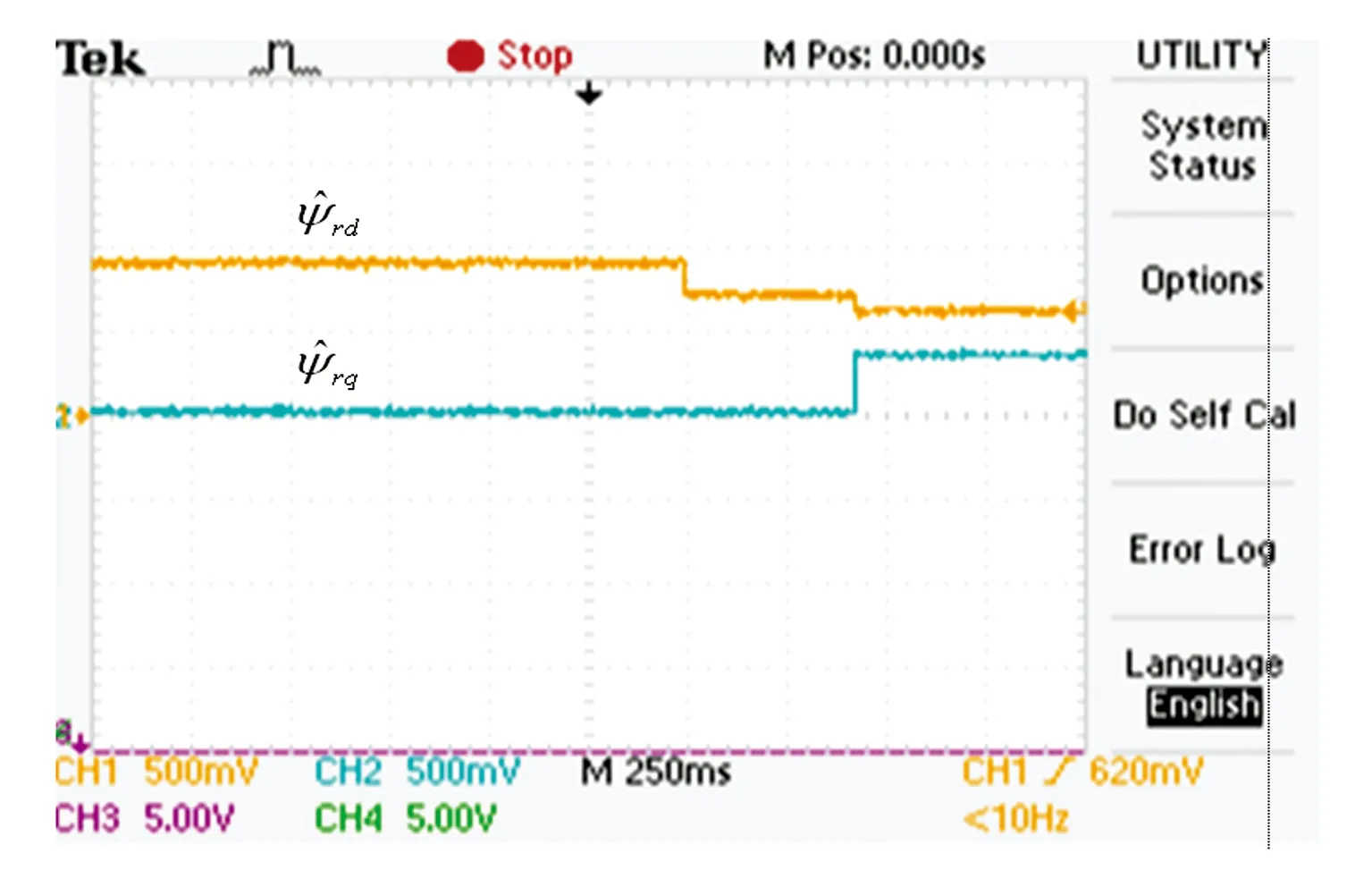
圖24 d、q軸轉(zhuǎn)子磁鏈觀測(cè)值(磁鏈:0.5 Wb/div;t:250 ms/div)
通過對(duì)比不同情況下的仿真結(jié)果和試驗(yàn)波形,兩者波形基本相似,試驗(yàn)結(jié)果證明了所設(shè)計(jì)觀測(cè)器能夠準(zhǔn)確辨識(shí)永磁體的磁鏈,系統(tǒng)動(dòng)態(tài)性能較好,實(shí)時(shí)性較高。
5 結(jié)論
本文提出一種基于擴(kuò)展磁鏈的變速趨近律滑模觀測(cè)器的轉(zhuǎn)矩閉環(huán)內(nèi)置式永磁同步牽引電機(jī)控制系統(tǒng)轉(zhuǎn)矩和永磁體失磁在線監(jiān)測(cè)方法。建立兩相靜止坐標(biāo)系下基于擴(kuò)展磁鏈的內(nèi)置式永磁同步牽引電機(jī)失磁故障的數(shù)學(xué)模型,通過選擇擴(kuò)展磁鏈為狀態(tài)變量,構(gòu)建了估算轉(zhuǎn)矩和永磁體磁鏈的變速趨近律滑模觀測(cè)器。該方法所設(shè)計(jì)的觀測(cè)器結(jié)構(gòu)簡單,理論推導(dǎo)和穩(wěn)定性證明簡單,對(duì)電機(jī)參數(shù)依賴較少。通過RT-LAB搭建的硬件在環(huán)實(shí)時(shí)仿真系統(tǒng)進(jìn)行試驗(yàn),其試驗(yàn)結(jié)果和MATLAB仿真結(jié)果均顯示系統(tǒng)動(dòng)態(tài)響應(yīng)速度更快,動(dòng)態(tài)過程超調(diào)更小,具有更好的系統(tǒng)動(dòng)態(tài)性能,能以更快的速度跟蹤變化量,對(duì)轉(zhuǎn)矩變化和永磁體磁鏈能夠進(jìn)行精確觀測(cè)辨識(shí),且轉(zhuǎn)矩觀測(cè)不受交直軸電感和轉(zhuǎn)子磁鏈變化的影響,具有較強(qiáng)的魯棒性,驗(yàn)證了所提方法的準(zhǔn)確性和有效性。本文方法可為轉(zhuǎn)矩閉環(huán)永磁同步牽引電機(jī)控制系統(tǒng)提供準(zhǔn)確的轉(zhuǎn)矩反饋和永磁體磁鏈信息,有利于提高永磁同步電機(jī)牽引傳動(dòng)系統(tǒng)的控制性能和預(yù)防不可逆失磁風(fēng)險(xiǎn),對(duì)于軌道列車的安全運(yùn)行具有重要的意義。
參考文獻(xiàn):
[1]馮江華,桂衛(wèi)華,符敏利,等.鐵道車輛牽引系統(tǒng)用永磁同步電機(jī)比較[J].鐵道學(xué)報(bào),2007,29(5):111-116.
FENG Jianghua,GUI Weihua,FU Minli,et al.Comparison of Permanent Magnet Synchronous Motors Applied to Railway Vehicle Traction System[J].Journal of the China Railway Society,2007,29(5):111-116.
[2]Matsuoka Koichi.Development Trend of the Permanent Magnet Synchronous Motor for Railway Traction[J].IEEJ Transactions on Electrical and Electronic Engineering,2007,2(2):154-161.
[3]盛義發(fā),喻壽益,桂衛(wèi)華,等.軌道車輛用永磁同步電機(jī)系統(tǒng)弱磁控制策略[J].中國電機(jī)工程學(xué)報(bào),2010,30(9):74-79.
SHENG Yifa,YU Shouyi,GUI Weihua,et al.Field Weakening Operation Control Strategies of Permanent Magnet Synchronous Motor for Railway Vehicle[J].Proceedings of the CSEE,2010,30(9):74-79.
[4]許俊峰,李耘蘢,許建平.永磁同步電機(jī)作為機(jī)車牽引電機(jī)的應(yīng)用現(xiàn)狀及前景[J].鐵道學(xué)報(bào),2005,27(2):130-132.
XU Junfeng,LI Yunlong,XU Jianping.Present Situation and Prospect of Applying Permanent Magnet Synchronous Motors to Railway Locomotives[J].Journal of the China Railway Society,2005,27(2):130-132.
[5]馮江華.軌道交通永磁同步牽引系統(tǒng)的發(fā)展概況及應(yīng)用挑戰(zhàn)[J].大功率變流技術(shù),2012(3):1-7.
FENG Jianghua.Development Overview and Application Challenges of Permanent Magnet Synchronous Traction System for Rail Transit[J].High Power Converter Technology,2012(3):1-7.
[6]唐任遠(yuǎn).稀土永磁電機(jī)的關(guān)鍵技術(shù)與高性能電機(jī)開發(fā)[J].沈陽工業(yè)大學(xué)學(xué)報(bào),2005,27(2):162-166.
TANG Renyuan.Research and Development of Rare-earth Permanent Magnet Machines[J].Journal of Shen yang University of Technology,2005,27(2):162-166.
[7]Krishnan R,Praveen Vijayraghavan.Fast Estimation and Compensation of Rotor Flux Linkage in Permanent Magnet Synchronous Machines[C]//IEEE ISIE,Bled,Slovenia,1999.
[8]黃浩,柴建云,姜忠良,等.汝鐵硼稀土永磁材料交流失磁[J].清華大學(xué)學(xué)報(bào),2004,44(6):721-724.
HUANG Hao,CHAI Jianyun,JIANG Zhongliang,et al.Excitation Loss in a Nd-Fe-B Magnetic Materials with Alternating Magnetic Fields[J].Journal of Tsinghua University,2004,44(6):721-724.
[9]陳致初,符敏利,彭俊.永磁牽引電動(dòng)機(jī)的失磁故障分析及預(yù)防措施[J].大功率變流技術(shù),2010(3):42-45.
CHEN Zhichu,FU Minli,PENG Jun.Demagnetization Analysis and Preventive Measures of Permanent Magnet Traction Motor[J].High Power Converter Technology,2010(3):42-45.
[10]Kang Gyuhong,Jin Hur,Hyuk Nam,et al.Analysis of Irreversible Magnet Demagnetization in Line-start Motors Based on the Finite-element Method[J].IEEE Transactions on Magnetics,2003,39(3):1 488-1 491.
[11]CHEN Zhiqian,Tomita Mutuwo,Doki Shinji,et al.An Extended Electromotive Force Model for Sensorless Control of Interior Permanent-magnet Synchronous Motors[J].IEEE Transactions on Industrial Electronics,2003,50(2):288-295.
[12]肖曦,張猛,李永東.永磁同步電機(jī)永磁體狀況在線監(jiān)測(cè)[J].中國電機(jī)工程學(xué)報(bào),2007,27(24):43-47.
XIAO Xi,ZHANG Meng,LI Yongdong.On-line Estimation of Permanent-magnet Flux Linkage Ripple for PMSM[J].Proceedings of the CSEE,2007,27(24):43-47.
[13]何靜,張昌凡,賈林,等.一種永磁同步電機(jī)的失磁故障重構(gòu)方法研究[J].電機(jī)與控制學(xué)報(bào),2014,18(2):8-14.
HE Jing,ZHANG Changfan,JIA Lin,et al.Demagnetization Fault Reconstruction for Permanent Magnet Synchronous Motor[J].Electric Machines and Control,2014,18(2):8-14.
[14]張昌凡,王耀南,何靜.永磁同步伺服電機(jī)的變結(jié)構(gòu)智能控制[J].中國電機(jī)工程學(xué)報(bào),2002,22(7):13-17.
ZHANG Changfan,WANG Yaonan,HE Jing.Variable Structure Intelligent Control for PM Synchronous Servo Motor Drive[J].Proceedings of the CSEE,2002,22(7):13-17.
[15]TAN C P,EDWARDS C.Sliding Mode Observers for Detection and Reconstruction of Sensor Faults[J].Automatica,2002,38:1 815-1 821.
[16]楊淑英,占琦,張興,等.基于擴(kuò)展磁鏈觀測(cè)的永磁同步電機(jī)轉(zhuǎn)矩閉環(huán)矢量控制[J].電力系統(tǒng)自動(dòng)化,2014,38(6):80-84.
YANG Shuying,ZHAN Qi,ZHANG Xing,et al.Torque Closed-loop Vector Control Based on Extended Flux Linkage Observer of Permanent Magnet Synchronous Motor[J].Automation of Electric Power Systems,2014,38(6):80-84.