基于WiFi的室內迭代定位算法的研究
2016-05-09 07:19:14楊波波
計算機應用與軟件 2016年4期
楊波波 張 磊
基于WiFi的室內迭代定位算法的研究
楊波波 張 磊
(河北工業(yè)大學控制科學與工程學院 天津 300130)
復雜多變的室內環(huán)境引起的電波信號多徑傳播、非視距傳播等問題是影響室內定位精度的主要因素。現有的室內定位算法為了提高定位精度均需要大量的先驗信息或額外的硬件投入。針對以上問題,提出一種基于WiFi信號接收強度的迭代定位算法,通過引入定位評價函數,采用迭代算法選取一組最優(yōu)的路徑損耗指數來改善定位精度。現場實驗結果表明,該算法能夠在無需定位環(huán)境的先驗信息和額外的硬件投入情況下,獲得較高的定位精度。
WiFi RSSI 迭代定位
0 引 言
自從全球定位系統(tǒng)GPS問世以來,無線定位技術一直不斷的發(fā)展壯大。我國自主研發(fā)的北斗衛(wèi)星導航系統(tǒng)已經于2012年底正式提供區(qū)域服務,向亞太大部分地區(qū)提供連續(xù)無源定位、導航、授時等服務。然而,無論是我國的北斗定位系統(tǒng)還是GPS衛(wèi)星定位系統(tǒng),其定位精確度一直不能讓人滿意,十幾米甚至幾十米的定位誤差在室外環(huán)境下尚可接受,但是這不能滿足室內更高精度的定位服務要求。
目前室內定位技術已在眾多領域得到了應用,例如倉庫物品管理、醫(yī)療救助、室內機器人移動定位等[1]。室內定位技術需求的持續(xù)增長,促進了超寬帶定位技術、紅外定位技術、超聲波定位技術、Zigbee定位技術、WiFi定位技術的發(fā)展[2]。考慮到硬件成本和定位精度的雙重限制,以上定位技術中只有WiFi定位已經擁有較大的網絡覆蓋范圍,并且具備低成本和低功耗等優(yōu)點[3]。另外根據工信部統(tǒng)計數據顯示,2014年1月底中國移動通信用戶達12.35億。其中4.19億為3G用戶,8.38億為移動互聯(lián)網接入用戶。伴隨著智能手機和平板電腦的普及,無線WiFi熱點得到了廣泛布設,在商場、寫字樓等建筑內已有大量的WiFi節(jié)點。所以WiFi定位相對于其他定位技術具有無可比擬的優(yōu)勢。
目前,典型的WiFi室內定位方法主要是基于信號接收強度(RSSI),而基于到達角度(AOA)、到達時間(TOA)、到達時間差(TDOA)的定位方法均需額外的設備投入,并不適合工程應用。然而基于RSSI的定位極易受到干擾,導致定位結果的異常,為了解決這一問題,眾多研究者提出了多種改進的算法和策略。
基于RSSI的定位又分為非測距和測距兩種。指紋匹配定位是典型的非測距定位方法,該方法在離線階段需要耗費大量的人力物力來建立指紋數據庫,工作量十分巨大。另外定位環(huán)境發(fā)生變化則需要重新進行建立指紋數據庫,如果指紋數據庫過大則又會降低檢索速度,所以指紋匹配定位應用局限性較大。基于測距的定位方法較為簡單,本質都是對距離方程進行求解,文獻[4-6]中分別用區(qū)域質心估計算法、極大似然估計法和最小二乘法三種定位算法來求解定位。文獻[7]給出了以上三種定位求解算法的性能分析。文獻[8]中通過修正室內環(huán)境下的路徑損耗指數,采用二次定位法取得了較好的定位效果。本文在已有算法的基礎上提出一種基于WiFi信號接收強度(RSSI)的迭代定位算法,通過引入定位評價函數,采用迭代算法獲取一組最優(yōu)的路徑損耗指數來改善存在非視距誤差時的定位精度。該算法不需要定位環(huán)境的先驗信息和額外的硬件投入,并通過現場實驗驗證了該算法的有效性。
1 RSSI信號傳播模型
無線電通信,其電波信號在介質中傳輸時,電波信號的強度值(RSSI)與發(fā)射端和接收端的距離有關系,并且隨著距離的增大呈現對數衰減趨勢[9]。RSSI與發(fā)射端和接收端之間距離的關系如下:
(1)
其中,R是接收端在距離d處獲取到的無線AP節(jié)點的信號強度,單位是dB;R0是常值,其大小取決于在參考距離d0處,測量得到的無線AP點的信號強度;d0為參考距離,一般選取為1米;γ是路徑損耗指數;Xσ是一個隨機數,主要受信道噪聲和陰影的影響[10]。在式(1)中,路徑損耗指數的不確定性使得獲取精確的距離非常困難。路徑損耗指數與周圍環(huán)境密切相關,人的走動、室內物品的移動都會影響到路徑損耗指數。不同定位環(huán)境下的路徑損耗指數的取值如表1[11]所示。
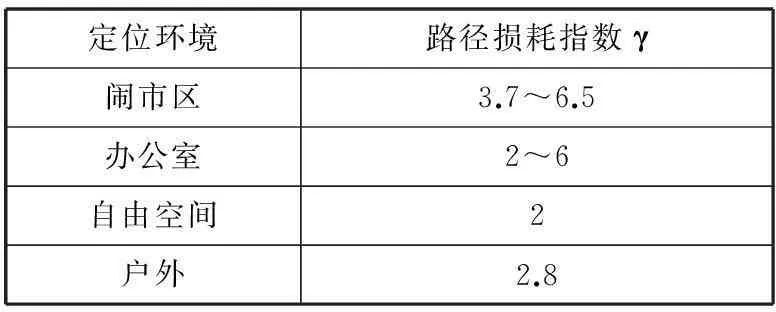
表1 路徑損耗指數表
2 迭代定位算法
文獻[7]給出了區(qū)域質心估計算法、極大似然估計法和最小二乘法三種求解定位算法的性能分析。其中區(qū)域質心估計算法定位效果較差,極大似然估計法定位效果較好但是該算法計算量太大,因此本文選取最小二乘法利用經過卡爾曼濾波后的數據進行求解定位。
假設定位環(huán)境中部署n個無線AP點,其坐標集合為{(x1,y1),(x2,y2),…,(xn,yn)},接收端坐標為(x,y),接收端測量得到各無線AP點WiFi信號強度RSSI集合為{R1,R2,…,Rn}。根據式(1)中RSSI信號傳播模型可以計算得到接收端的距離集合為{d1,d2,…,dn},由此可以建立接收端與AP之間的距離方程:
(2)
式中可化簡為如下格式:
AX=B
(3)
其中:
(4)
(5)
(6)
(7)
可解得X=(ATA)-1ATB。
由于定位環(huán)境的先驗信息未知且易受人員走動、物品移動等影響,下面將通過對路徑損耗指數γ進行賦值迭代,選取最優(yōu)的路徑損耗指數γ。主要過程如下:



(8)


7) 將以上過程中最終獲取的一組最優(yōu)的路徑損耗指數代入距離傳輸模型中,然后利用最小二乘法進行系統(tǒng)最終定位。
考慮到算法計算量的問題,路徑損耗指數的初始值劃分不宜過細,即η的取值不宜過大。
3 實驗結果與分析
為了驗證迭代定位算法的在室內環(huán)境下的定位性能,本文選取了合適的軟硬件平臺進行現場實驗測試。在長12.50米寬7.00米的會議室內部署4個已知位置的無線AP節(jié)點,如圖1所示。以AP1所在位置為原點建立直角坐標系,4個無線AP節(jié)點的坐標分別為AP1(0,0),AP2(8.00,0),AP3(8.00,6.00),AP4(0,6.00),并選取了16個測量點,每個點都用高精度激光測距儀測量其實際位置,編號為1~16。實驗時d0=1.00米,η=5,R0是在d0處測量500次信號強度的平均值,實驗測得R0=-20dB。停止迭代的閾值設置為0.10。經過遍歷,當γ=3.60時16個定位點的定位誤差之和最小,所以非迭代定位算法中固定的路徑損耗指數γ=3.60。
在圖1所示的環(huán)境下,按照上述參數進行現場實驗,將定位終端分別移動到16個已知位置的定位點,每個定位點測量四個無線WiFi節(jié)點的信號強度20次。對采樣數據進行卡爾曼濾波后進行定位,實驗結果如圖2所示。
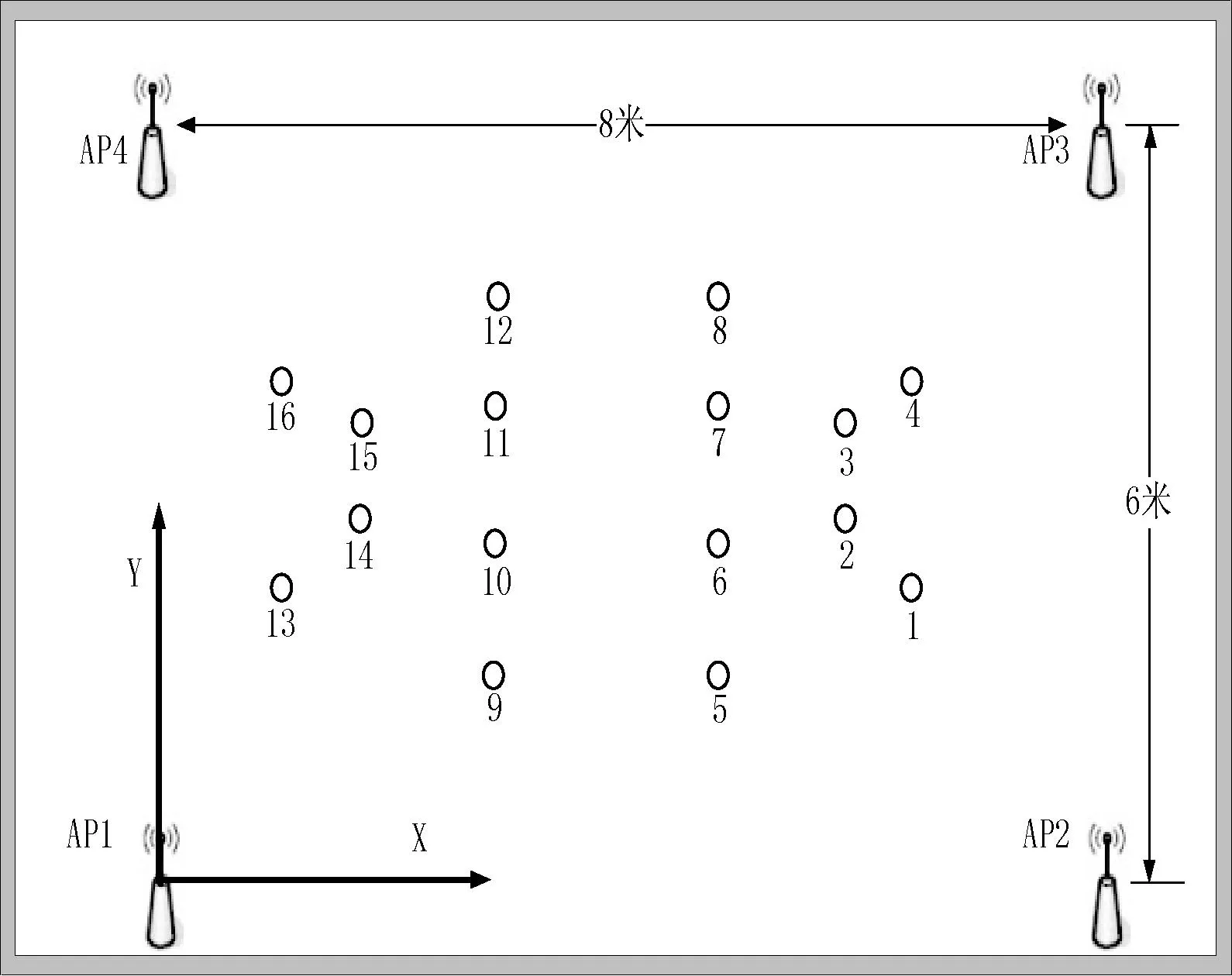
圖1 AP與測試點布局圖
由圖2可知迭代定位算法優(yōu)于非迭代算法,其定位誤差低于1.50米的點超過了90%,最大定位誤差2.00米,最小定位誤差0.24米,平均誤差0.97米,非迭代定位算法的平均誤差為1.52米。
為了驗證算法的魯棒性,模擬無線AP節(jié)點出現故障或是遮擋等引起的信號強度下降的情況,將讀取到的無線節(jié)點AP1的信號強度減少10 dB,實驗結果如圖3所示。
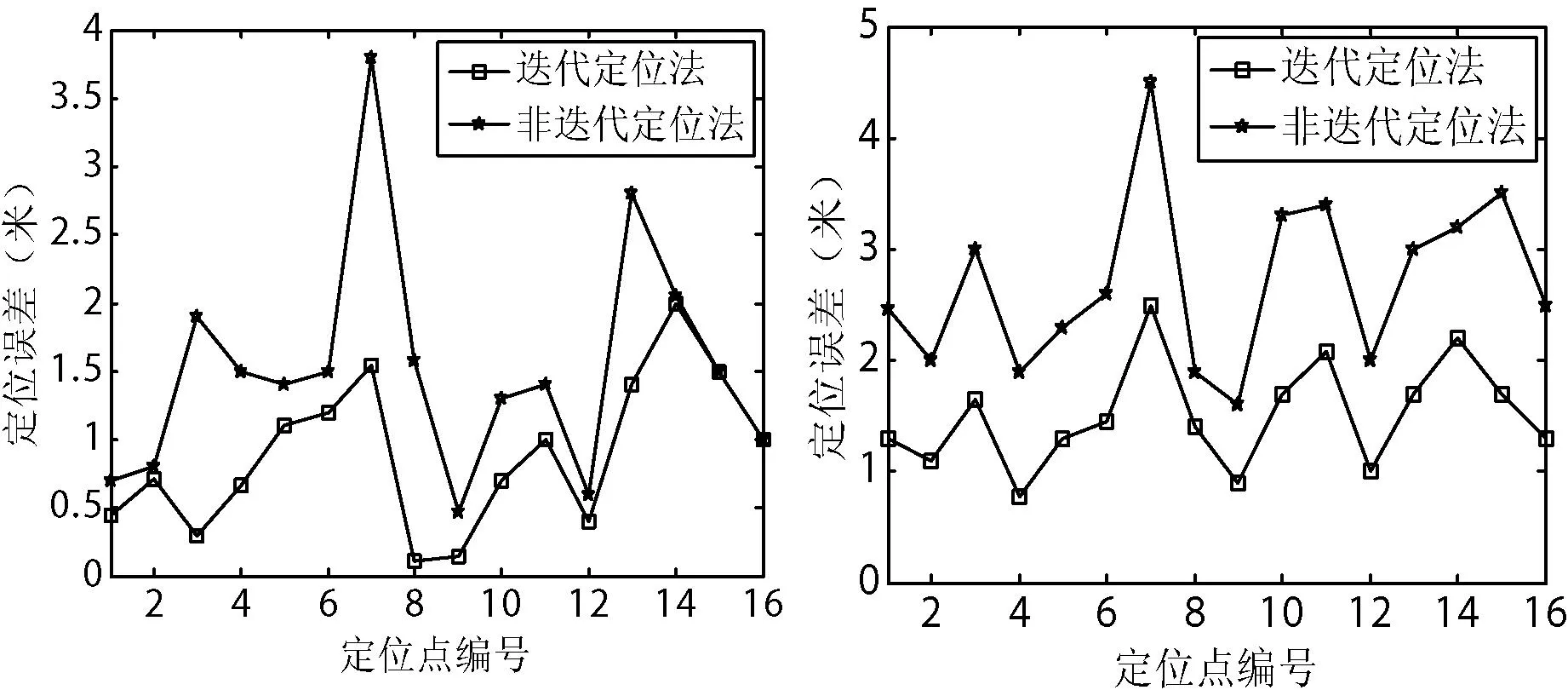
圖2 16個定位點與對應定位誤差 圖3 對AP1進行遮擋后魯棒性驗證實驗結果
由圖3可知迭代定位算法的魯棒性明顯優(yōu)于非迭代算法,其定位平均誤差為1.60米,定位平均誤差相對于圖2中的結果增大了0.63米,而非迭代定位算法定位平均誤差已到達2.69米,定位平均誤差增大了1.17米。
4 結 語
基于WiFi的迭代算法,相對于傳統(tǒng)的定位算法不需要定位環(huán)境的先驗信息和額外的硬件投入,而是通過引入路徑損耗指數的更新迭代,使其接近于定位環(huán)境的真實值。現場實驗結果表明,該迭代定位算法的定位精度和魯棒性均優(yōu)于傳統(tǒng)的最小二乘法,能夠比較好地應用于室內環(huán)境的定位,實現了在沒有額外的硬件投入下,獲得較好的定位效果,具有非常高的實用價值。但是由于迭代過程的存在,算法計算量較大,相對于非迭代算法在計算過程中開銷較大。
[1] Jose M Alonso,Manuel Ocana,Noelia Hernandez,et al.Enhanced WiFi localization system based on Soft Computing techniques to deal with small-scale variations in wireless sensors[J].Applied Soft Computing,2011(11):4677-4691.
[2] Mu Zhou,Zengshan Tian,Kunjie Xu,et al.SCaNME:Location tracking system in large-scale campus WiFi environment using unlabeled mobility map[J].Expert Systems with Applications,2014(41):3429-3443.
[3] 謝代軍.無線局域網室內定位技術研究[D].鄭州: 解放軍信息工程大學信息系統(tǒng)工程學院,2013.
[4] Yuanchen Zhu,Steven J Gortler,Dylan Thurston.Sensor network localization using sensor perturbation[J].ACM Transactions on Sensor Networks,2011,7(4):1-23.
[5] Gracioli G,Fr?hlich A A.Evaluation of an RSSI-based Location Algorithm for Wireless Sensor Networks[J].IEEE Latin America Transactions,2011,9(1):830-835.
[6] Zhang Rongbiao,Guo Jianguang,Chu Fuhuan,et al.Environmental-adaptive indoor radio path loss model for wireless sensor networks localization[J].AEU-International Journal of Electronics and Communications,2011,65(12):1023-1031.
[7] 董瑩瑩.WiFi網絡下的三維空間定位技術研究[D].北京:北京郵電大學信息與通信工程學院,2012.
[8] 潘立波.基于WiFi技術的無線定位算法研究與實現[D].浙江:浙江大學電子與通信工程學院,2013.
[9] Anvar Narzullaev,Yongwan Park,Kookyeol Yoo,et al.A fast and accurate calibration algorithm for real-time locating systems based on the received signal strength indication[J].International Journal of Electronics and Communications (AEü),2011(65):305-311.
[10] 張興.WLAN室內定位信號特征提取算法研究[D].哈爾濱:哈爾濱工業(yè)大學電子與信息工程學院,2013.
[11] Zhi Ren,Guangyu Wang,Qianbin Chen,et al.Modelling and simulation of Rayleigh fading,path loss,and shadowing fading for wireless mobile networks[J].Simulation Modelling Practice and Theory,2011(19):626-637.
ON INDOOR ITERATIVE POSITIONING ALGORITHM BASED ON WiFi
Yang Bobo Zhang Lei
(SchoolofControlScienceandEngineering,HebeiUniversityofTechnology,Tianjin300130,China)
The problems of multipath propagation and non line-of-sight propagation of radio signals caused by the complex indoor environment are the main factors affecting indoor positioning accuracy. Existing indoor positioning algorithms all require a large amount of priori information or additional hardware investment to improve the positioning accuracy. In order to solve the problem above, this paper proposes an indoor iterative positioning algorithm which is based on WiFi signal reception strength. By introducing positioning evaluation function, it employs iterative algorithm to select a set of optimal path loss exponent to improve the positioning accuracy. On-site experimental results show that the algorithm can obtain higher positioning accuracy without priori information of positioning environment or additional hardware investment.
WiFi RSSI Iterative positioning
2014-08-31。河北省高等學校科學技術研究指導項目(Z2012135)。楊波波,碩士生,主研領域:物聯(lián)網,計算機控制與應用。張磊,教授。
TP393.1
A
10.3969/j.issn.1000-386x.2016.04.061