無刷直流電機的建模與仿真
2016-05-14 10:48:55王翥陳穎麗
科技創新與應用 2016年9期
王翥 陳穎麗
摘 要:相對于傳統的有刷直流電機,無刷直流電機的特點表現為:使用壽命長、效率更高、低噪聲、啟動轉矩大等特點,在軍事,伺服控制、家用電器等領域被廣泛應用,文章首先研究無刷直流電機基礎結構,其次分析其數學模型,并用Maltab搭建了無刷直流電機控制系統的仿真模型,詳細介紹了電機本體,轉速控制,轉矩計算等模塊的功能和實現方法,通過仿真,證明了該模型的可行性。
關鍵詞:無刷直流電機;仿真;模型
1 無刷直流電機的數學模型
以兩相導通星形三相六狀態為例,設ua,ub,uc是三相定子電壓;ea,eb,ec是三相定子反電動勢,ia,ib,ic為三相定子電流,La,Lb,Lc是三相定子自感,Lab,Lac,Lba,Lba,Lca,Lca為三相定子繞組互感,Ra,Rb,Rc為三相繞組的相電阻,P為微分算子(d/dt)。
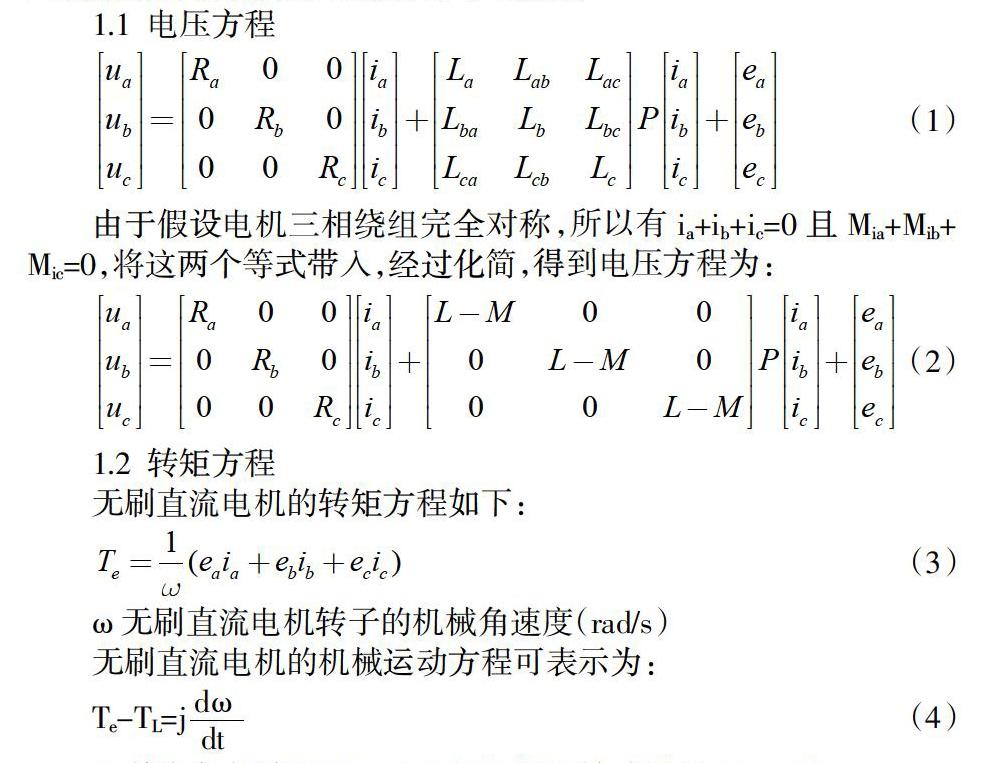
1.1 電壓方程
由于假設電機三相繞組完全對稱,所以有ia+ib+ic=0且Mia+Mib+Mic=0,將這兩個等式帶入,經過化簡,得到電壓方程為:
1.2 轉矩方程
無刷直流電機的轉矩方程如下:
?棕無刷直流電機轉子的機械角速度(rad/s)
無刷直流電機的機械運動方程可表示為:
TL其中負載轉矩(N·m);J是電機的轉動慣量(Kg·m2)。
2 基于MATLAB/Simulink的無刷直流電機控制系統建模
在MATLAB/Simulink環境下,在了解和分析了無刷直流電機的數學模型后,建立無刷直流電機控制系統仿真模型,該控制系統采用雙閉環控制方案,轉速環為外環,采用PI調節器,內環是電流環,在建模之前作以下假定:
(1)不計電樞反應,換向過程等的影響;
(2)磁路不飽和,忽略磁滯和渦流的影響;
(3)假設三相繞組,定子電流,轉子磁場分布完全對稱,氣隙磁場為方波;
(4)假設外加電源為理想的直流恒壓電源。
根據模塊化的思想,系統可以由以下幾個子模塊構成:
2.1 無刷直流電機本體
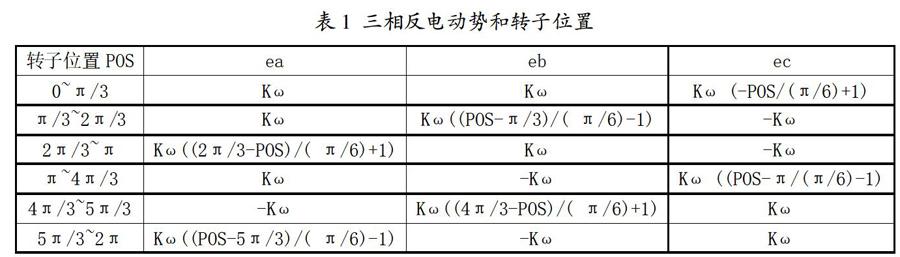
無刷直流電機本體模塊是關鍵的部分。本體模塊搭建最重要的部分是三相反電動勢的求取。由于不理想的反電動勢波形會造成較大的轉矩脈動等問題,所以理想的反電動勢波形的獲得是無刷直流電機仿真建模的關鍵問題,許多不同的學者在反電動勢的求取上作了大量研究,文章采用眾多方法中的一種:分段線性法。分段線性法簡單易行,該方法的思路是將一個3600的運行周期分為6個階段,每一個階段為600,電機所處的運行狀態是根據轉速和轉子位置兩個信號確定,并用線性方程來表示反電動勢波形,在理想情況二相導通星形三相六狀態下,無刷直流電機三相反電動勢和轉子位置之間滿足表1所示關系。
表1中K為反電動勢系數,POS是轉子位置信號,ω是轉速信號,根據以上關系,用MATLAB提供的S-Fuction功能編寫一個滿足以上邏輯關系的自定義函數。
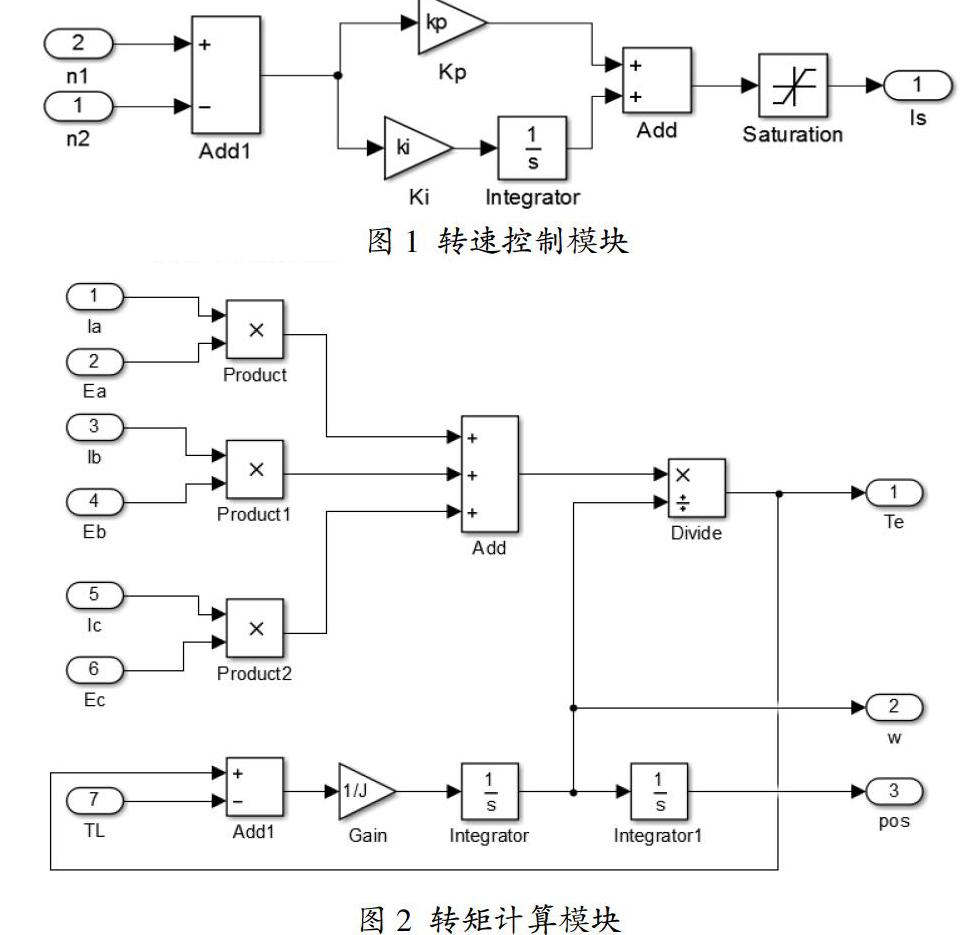
2.2 轉速控制模塊
轉速控制模塊如圖1所示,它的功能是讓實際電機轉速跟蹤參考轉速,實現轉速的閉環控制,模塊的輸入端為反饋轉速n1和參考轉速n2,它們的差值輸入到一個限幅的PI轉速調節器,模塊的輸出為三相參考電流Is。調節器的參數為比例系數Kp和積分系數Ki,為了將輸出電流的幅值限定在合理范圍內在輸出之前加入一個限幅模塊。
2.3 轉矩計算模塊
轉矩計算模塊的搭建由方程式(3)得到,為了得到Te,必須求得輸三相相電流和三相反電動勢,三相反電動勢已由S-Function部分求得,而三相電流在電機本體模塊也已經得到,將這兩組參數進行加乘運算即可得到電磁轉矩Te,由公式(4)可知,將電磁轉矩Te與負載轉矩Tl的差值進行積分運算即可得到轉速信號ω,求得的轉速信號ω積分運算得到電機位置信號POS。如圖2所示,
2.4 電壓逆變模塊
電壓逆變器模塊如圖3所示。模塊輸入是PWM控制信號,該模塊起到功率變換的作用,即電子換向器,具體實現是采用了Simulink中的SimPowerSysterm提供的三相全橋模塊,它的輸出是A,B,C三相的方波電流。
2.5 電流檢測模塊
理想情況下可以通過轉子的位置角來決定三相電流的反饋值。在二相導通星形三相六狀態下當轉子位置信號POS的值在0~π/3時,無刷直流電機的非換向相是b相,電流反饋值I就是b相電流絕對值;當轉子位置信號POS的值在π/3~2π/3時,無刷直流電機的非換向相是a相,電流反饋值I就是a相電流絕對值;當轉子位置信號POS的值在2π/3~π時,無刷直流電機的非換向相是c相,電流反饋值I就是c相電流絕對值。該模塊功能由S-Fuction實現。
2.6 電流PWM模塊
PI電流控制器的輸入為Is與I之差,輸出信號為Im,它與一個固定頻率的三角載波合成可以生成PWM信號。
將以上各個模塊組合起來,搭建起無刷直流電機控制系統的仿真模型,如圖5所示。
3 仿真結果
基于MATLAB/Simulink建立的無刷直流電機控制系統的仿真模型,首先對模塊中各個參數進行賦值,三相定子電阻r=0.1Ω,三相定子自感L=0.025L, 三相定子互感M=-0.065H,轉動慣量J=0.01,反電勢系數K=0.086,極對數P=1,額定轉速N=3000r/min,直流電源電壓為220V。在t=0.1S突加負載,大小為5N。然后對參數賦值后的模型在Simulink中進行仿真,得到系統的三個參數波形,分別為轉速N,轉矩Te, a相反電動勢仿真波形。
由圖可知,在N=3000 r/min的給定轉速下,系統轉速的相應較快且平穩,在t=0.1秒加入的負載的擾動下,轉速有所下降,但能很快恢復到平穩狀態,穩定運行時無靜差,系統表現出了較強的抗干擾能力。系統空載起動時,電磁轉矩在很短的時間內進入穩定狀態,忽略系統的摩擦轉矩,此時的電磁轉矩均值為0,在突加負載的擾動下,電磁轉矩有一定的脈動,這主要是由電流換向引起的.仿真電流曲線較準確地模擬了由于換向造成地相電流地動態變化,仿真結果符合理論分析,說明了該仿真模型的合理性。
4 結束語
文章在Simulink平臺下基于模塊化的思想搭建無刷直流電機(BLCDM)模型,該模型反應速度較快,各項參數指標基本符合理論分析,能夠較好的模擬無刷直流電機控制系統的工作過程,是進一步分析無刷直流電各種控制算法控制效果的基礎。
參考文獻
[1]胡雙,馬志云,周理兵.永磁無刷直流電機系統建模與仿真[J].微特電機,2003(3):21-23.
[2]紀志成,沈艷霞,姜建國.基于MATLAB無刷直流電機系統仿真建模的新方法[J].系統仿真學報,2003,15(12):1745-1749.
[3]包向華,章躍進.基于Simulink的永磁無刷直流電動機及控制系統的建模與仿真[J].電氣傳動自動化,2005,27(4):30-32.
[4]黃俊.王兆安電力電子變流技術[M].北京:機械工業出版社,2000.
[5]齊蓉,周素瑩,林輝,等.無刷直流電機PWM調制方式與轉矩脈動關系研究[J].微電機,20006,39(1):58-61.
作者簡介:王翥(1991-),男,漢族,湖北荊州市人,在校研究生,工學碩士,單位:武漢理工大學自動化學院,研究方向:電氣工程及其自動化。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
科技資訊(2016年18期)2016-11-15 20:09:22
數字技術與應用(2016年9期)2016-11-09 23:25:33
數字技術與應用(2016年9期)2016-11-09 22:09:07
光學精密工程(2016年6期)2016-11-07 09:07:19
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49
企業導報(2016年6期)2016-04-21 17:56:19
