基于ADXL362的電梯加速度無線測量系統(tǒng)的設計
2016-05-14 11:13:49梁敏健黃永堅
海峽科技與產(chǎn)業(yè) 2016年7期
梁敏健 黃永堅
摘 要:本文設計了一種基于ADXL362的電梯加速度測量系統(tǒng),采用了數(shù)字式MEMS三軸加速度傳感器ADXL362代替?zhèn)鹘y(tǒng)的分立元件及電路,縮小了系統(tǒng)的體積、降低了成本,并提高了可靠性。使用WIFI傳輸技術(shù)避免了現(xiàn)場接線的繁瑣。使用平板電腦及開發(fā)的應用軟件對數(shù)據(jù)進行實時采集和處理分析,并顯示檢測結(jié)果,提高了檢測效率。實驗表明該系統(tǒng)操作簡單、工作穩(wěn)定、檢測準確,具有良好的應用前景。
關(guān)鍵詞:電梯加速度;MEMS;WIFI
0 引言
隨著電梯在高層建筑的普及應用,人們在乘坐電梯時對其穩(wěn)定性和舒適性的要求也越來越高。我國評價電梯承運質(zhì)量的主要依據(jù)是GB/T10058-2009《電梯技術(shù)條件》,而對相關(guān)參數(shù)的采集及數(shù)據(jù)處理要求則是依據(jù)GB/T24474-2009《電梯承運質(zhì)量測量》。
目前,國際上常用于檢測電梯(扶梯)運行狀況的重要工具是EVA-625系統(tǒng)和EVA振動分析工具軟件,它是一個記錄和分析電梯(扶梯)運行狀況的組合體,在中國還未大面積使用。本文提出了一種基于MEMS的電梯加速度無線測量系統(tǒng),采用MCU和MEMS三軸加速度傳感器對電梯運行的三個方向(三維)的振動加速度(X軸為轎廂前后方向,Y軸為轎廂左右方向、Z軸為轎廂上下方向)進行實時采集和記錄,并利用無線WiFi技術(shù)傳輸?shù)绞殖纸K端進行數(shù)據(jù)處理和顯示。
1 系統(tǒng)總體方案設計
整個測量系統(tǒng)由一個轎廂振動檢測傳感系統(tǒng)和一個手持終端組成。轎廂振動檢測傳感系統(tǒng)由電源管理模塊、三軸加速度傳感器模塊、微處理器模塊及無線通信模塊組成。三軸加速度傳感器在微處理器的控制下對電梯轎廂三軸加速度進行采集,把加速度信號轉(zhuǎn)化成數(shù)據(jù)送入微處理器。微處理器作為控制、運算處理中心,一方面可按程序?qū)θS加速度傳感器進行參數(shù)設置和控制,以實現(xiàn)連續(xù)實時采樣;一方面把采樣數(shù)據(jù)封裝成包,通過無線通信模塊發(fā)射到手持終端上。無線通信模塊負責電梯轎廂振動檢測傳感系統(tǒng)和手持終端間的無線通信。電源管理模塊負責電池的充放電管理及模塊所需各種電源的轉(zhuǎn)換。手持終端負責對測量系統(tǒng)的控制、數(shù)據(jù)的實時接收、處理及顯示。無線手持終端需要具有一定的數(shù)據(jù)處理能力,而且要求方便攜帶,操作簡單,可以采用小尺寸平板電腦。
2 硬件系統(tǒng)的設計
2.1 三軸加速度傳感器模塊
三軸加速度傳感器模塊要完成被測信號到模擬電信號的轉(zhuǎn)換,抗混疊濾波、A/D轉(zhuǎn)換,數(shù)字控制接口等多種功能,是整個測量系統(tǒng)的關(guān)鍵,其性能影響整個測量系統(tǒng)的精度和可靠性。
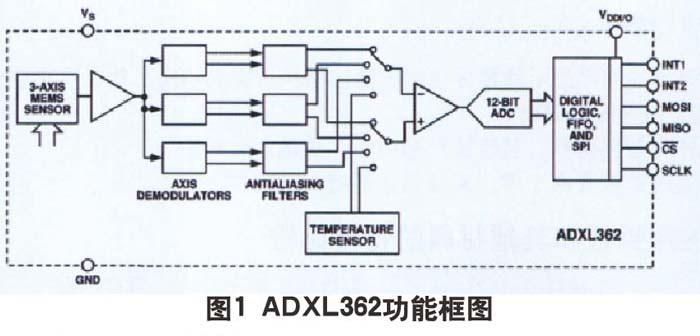
本設計采用了MEMS(微機電系統(tǒng)傳感器)ADXL362。ADXL362是ADI公司的微功耗三軸加速度傳感器,數(shù)字型輸出、體積小、輸出范圍±2g~±8g可程控,噪音可低至175 ,分辨率可達1mg/LSB。ADXL362內(nèi)部功能框圖如圖1所示,內(nèi)部集成了三軸加速度計、放大器、解調(diào)器、抗混疊濾波器、A/D轉(zhuǎn)換、FIFO、SPI接口、溫度傳感器等多個功能模塊。ADXL362傳感器模塊電路中每個電源管腳附近放置一個0.1μF的貼片陶瓷電容進行去耦,ADXL362采集到的數(shù)據(jù)通過SPI總線輸出到微處理器。
2.2 微處理器模塊
微處理器是整個測量系統(tǒng)的控制核心,因此要求微處理器運算速度快,而且具有足夠的RAM。本系統(tǒng)采用ST公司的Cortex M3內(nèi)核處理器STM32F103T8為主控芯片。微處理器模塊電路系統(tǒng)采用了MAXIM公司的MAX803作為系統(tǒng)電源的監(jiān)控,為了保證微處理器的工作可靠穩(wěn)定,在處理器的每個電源管腳附近放置一個0.1uF的貼片陶瓷電容以實現(xiàn)電源去耦。
2.3 電源管理系統(tǒng)
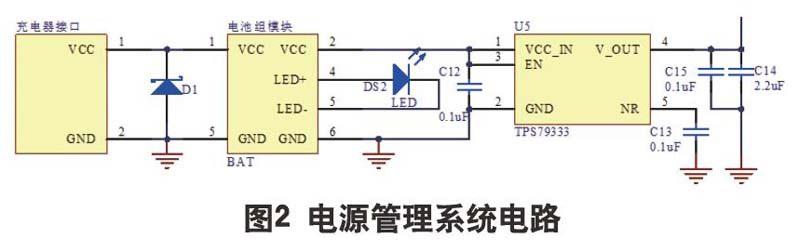
電源管理系統(tǒng)電路如圖2所示,本測量系統(tǒng)采用鋰電池供電,為了簡化設計和提高系統(tǒng)可靠性,選用了帶充放電保護電路及電量監(jiān)測報警功能的電池模塊。電池的電壓在3.7~4.2V之間。充電接口與電池模塊之間放置TVS管,以吸收防浪涌和瞬態(tài)干擾,防止對電池模塊和整個系統(tǒng)造成嚴重影響甚至損壞。因為電池最低電壓與系統(tǒng)電源電壓之間僅有0.4V,因此要選用超低壓差的線性穩(wěn)壓器(ULDO)才能滿足要求。TPS79333在滿載時輸入輸出壓降不超過0.18V,而且具有很高的電源紋波抑制比(PSRR),能為系統(tǒng)提供穩(wěn)定的電源。
2.4 數(shù)據(jù)無線傳輸模塊
為使該系統(tǒng)具有良好的兼容性,能充分利用目前主流手持終端自帶的無線傳輸功能,本系統(tǒng)的無線傳輸使用wifi技術(shù),較其它通信方式相比具有速度高、傳輸距離遠的優(yōu)點。該模塊體積小、成本低、功耗小、使用簡單,特別適合用于電池供電的無線傳感器的設計。無線傳輸模塊電路中UT-9011-SMD的UART接口與微處理器的UART接口相連,以實現(xiàn)數(shù)據(jù)傳輸;UT-9011-SMD的nLink管腳連接1個LED指示燈,當wifi有連接時,指示燈會亮;模塊的nRST是復位輸入接口,nReady是模塊啟動狀態(tài)輸出接口,nReload是恢復出廠設置輸入接口,分別連接到微處理器的通用I/O接口,由微處理器進行控制或讀取相關(guān)狀態(tài);模塊使用2.4GHz外置天線以提高接收和發(fā)射能力。
3 軟件設計
3.1 下位機軟件設計
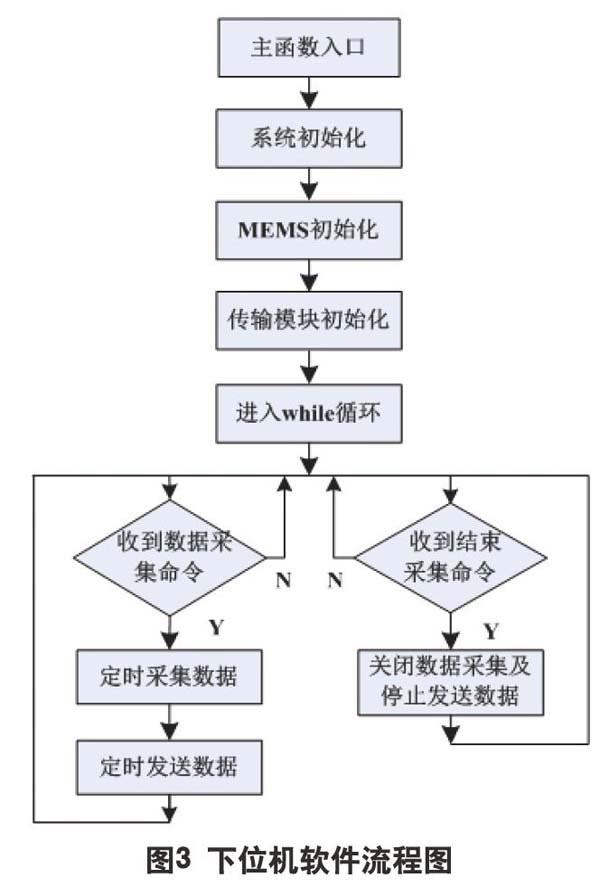
ARM下位機軟件流程圖如圖3所示。電源開啟系統(tǒng)上電運行后進入主函數(shù)運行,首先進行系統(tǒng)初始化程序,完成后利用SPI總線對MEMS三軸加速度傳感器ADXL362進行初始化和參數(shù)設置。傳感器的量程選擇±2g;抗混疊濾波器的帶寬選擇為采樣率的1/4;傳感器的工作模式設置為超低噪聲模式(噪聲水平175 );無線傳輸模塊使用UART與微處理器通信,通過AT+指令集的方式設置通信波特率為230400bps、AP工作模式。所有外表設備完成初始化后系統(tǒng)進入while循環(huán)查詢模式,當處理器接收到無線終端發(fā)送的“數(shù)據(jù)采集”命令,處理器通過SPI總線采集加速度數(shù)據(jù)并啟動發(fā)送子程序,通過無線傳輸模塊發(fā)送給手持無線終端;當處理器收到“停止采集”命令后,關(guān)閉數(shù)據(jù)采集及停止發(fā)送數(shù)據(jù),進入等待狀態(tài)。
3.2 手持終端及數(shù)據(jù)處理
手持終端用于人機交換、數(shù)據(jù)接收和數(shù)據(jù)處理、顯示,因此,手持終端首先需要有良好的人機互動界面和具備一定數(shù)據(jù)處理和運算能力,其次需要功耗低、體積小、適合電池供電以便于外出檢驗攜帶,同時還應具有低成本的優(yōu)勢,綜合以上考慮選擇市面主流android平板電腦。目前市面上主流android平板電腦都自帶wifi通信模塊,可連接到下位機建立的無線網(wǎng)絡與下位機進行通信。使用Java語言設計了應用軟件,可實現(xiàn)數(shù)據(jù)采集、曲線顯示、數(shù)據(jù)處理分析和保存等功能。
4 試驗與結(jié)果
使用該測量系統(tǒng)對一臺4層4站額定速度為1.75m/s的電梯運行全程進行了多次測試,通過數(shù)據(jù)結(jié)果與EVA-625儀器的檢測結(jié)果對比。實驗結(jié)果證明該檢測系統(tǒng)數(shù)據(jù)準確,重復性和穩(wěn)定性好。
參考文獻
[1] 陳建宇.EVA-625測試儀在檢測電梯垂直振動源的應用.福建農(nóng)機,2010(3):55-58.
[2] 陳景琪,張兵,蘇燕辰.基于MEMS的列車舒適度、平穩(wěn)性無線傳感器設計.儀表技術(shù)與傳感器,2014(11):4-6.
[3] ADXL362:微功耗三軸MEMS加速度計解決方案.世界電子元器件,2012(9):12-14.
[4] 美國MAXIM公司.MAX803數(shù)據(jù)手冊.
[5] 深圳宇泰科技公司無線通信模塊UT-9011-SMD數(shù)據(jù)手冊.