紅外線陣探測器數字圖像校正的改進
2016-05-14 21:38:50周娟彭垚
數字技術與應用 2016年7期
周娟 彭垚
摘要:傳統的兩點定標非均勻校正算法可以解決紅外線陣探測器像元響應率等的偏差。針對工程應用中光電紅外搜索跟蹤系統的孔徑光闌與紅外線陣探測器冷闌不匹配引入的雜散光現象,在傳統的基于紅外線陣探測器的兩點定標非均勻校正算法基礎上, 將其擴展為基于整幅數字圖像的面陣型非均勻校正方法。通過這一改進, 光電紅外搜索跟蹤系統雜散光現象造成的數字圖像非均勻性得到改善,圖像質量得以提高。
關鍵詞:紅外線陣探測器 圖像 非均勻性 校正
中圖分類號:TN215 文獻標識碼:A 文章編號:1007-9416(2016)07-0061-02
近年來,紅外探測在軍事和民用領域都得到了廣泛的使用。在軍事上廣泛應用于搜索跟蹤、火力控制、制導和監視等方面;在民用上主要用于測溫、成像、醫療診斷和防盜安全等方面。
紅外線陣探測器探測器采用掃描方式成像,受現有技術和工藝限制,探測器各像元之間響應率存在一定的偏差, 這將導致輸出圖象呈現條紋分布,這種圖象的不一致性在紅外波段表現比較明顯, 故被稱作紅外圖象的非均勻性。除探測器各像元響應率偏差外,紅外圖象非均勻性還與光學系統、處理電路、工作時間、工作環境、目標和背景溫度等因素有關。
在光電搜索跟蹤系統中,傳統的兩點定標非均勻校正算法可以很好地解決紅外線陣探測器像元響應率偏差、處理電路偏差以及工作環境、目標和背景的適應性。但在工程應用中,光電搜索跟蹤系統的孔徑光闌與紅外線陣探測器冷闌往往不能良好匹配,容易引入雜散光,采用傳統的兩點定標非均勻校正算法很難解決這一問題。
本文提出了一種改進型的紅外線陣探測器非均勻校正方法,可以解決光電搜索跟蹤系統的非均勻性問題,提高成像質量。
1 非均勻性校正算法
目前國內外的非均勻性校正算法可分為兩類,一類是基于定標的校正算法, 包括常用的一點校正、兩點校正、多點分段線性校正等。這種方法原理簡潔、校正精度高、實時性好、易于實現和集成, 被普遍采用。
另一類是基于場景的自適應校正算法, 這種方法能夠根據場景信息對校正的增益和偏置系數及時進行修正和更新,在一定程度上可以克服探測器像元響應隨時間和環境溫度等因素的改變帶來的校正誤差。
但是基于場景的算法需要存儲先前的圖象, 且計算的復雜性增加, 實際應用中存在一定的局限性。因此,目前應用較多的仍是兩點法和在此基礎上改進而來的多點分段非均勻性校正法。
1.1 兩點溫度定標校正法原理
兩點定標校正算法是建立在探測器像元特性為線性定常的前提下的, 外界輻射與焦平面各像元輸出之間呈線性關系:
(1)
式(1)中為像元輸出的電信號,為像元的響應率,為入射紅外輻射,為像元的偏置。
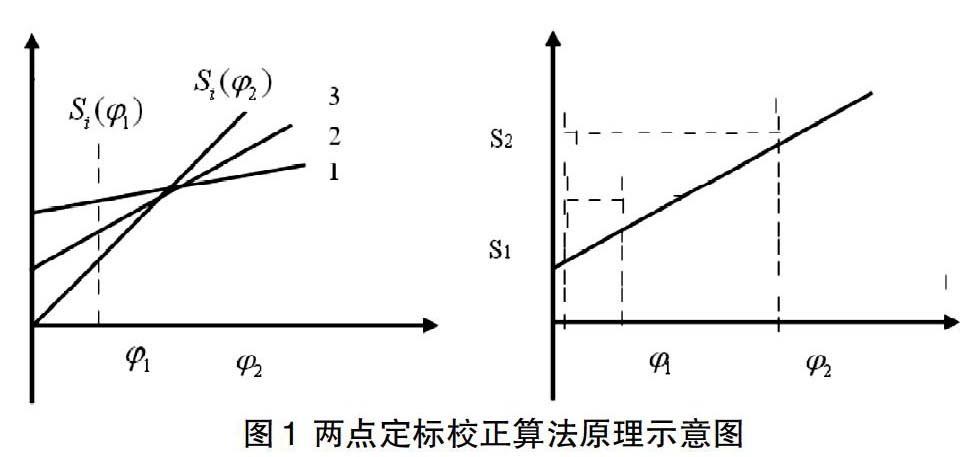
圖1為兩點定標校正算法的原理示意圖,橫坐標表示入射到探測器上的紅外輻射,縱坐標為輸出的電信號。直線1和直線3分別代表探測器兩個像元的響應特性,直線2為所有探測器像元校正后的響應特性。兩點定標校正算法就是將所有探測器單元的響應特性曲線變換為同一條響應特性曲線。它的物理意義在于:在均勻的輻射輸人情況下,在完成針對各個像元的響應率和偏置校正之后,探測器各像元的輸出電信號相同,從而消除了紅外圖象的非均勻性噪聲。
校正的具體方法為:實驗室黑體溫度分別在兩個標定溫度點T1和T2時, 獲得兩組紅外焦平面原始數據,和,兩個校正后的輸出為和。其中表示焦平面中各像元,則有:
(2)
通過式(2)計算得到校正的增益和偏置系數,其結果如式(3)所示:
(3)
式(3)中關鍵是和的確定。由于它要反映所有像元對一定輻射的一致響應值,所以一種比較常用的做法是取在該溫度下,所有像元輻射響應輸出的平均值,即:
(4)
式(4)中,n為探測器像元的個數
當紅外線陣探測器接收到實際目標場景輻照度時,利用以上所得到的各探測器像元的相應校正值對其輸出進行實時校正,如(5)式:
(5)
式(5)中,為實驗室得到的線陣探測器第個像元的增益,為第個像元的實時響應信號,為探測器第個像元的偏置,為第個像元的校正后的輸出信號。
1.2 校正算法分析
兩點定標校正算法對偏置進行補償的同時對增益系數也作出了校正, 其校正具有一定的動態范圍, 在兩個定標點之間校正效果良好。兩點校正算法除需要定標以外, 對景像的內容沒有任何要求, 這種方法的優點是計算量小, 便于實時實現。但是在實際應用中, 各探測器像元的響應通常呈非線性, 加上系統噪聲和時間漂移等因素,尤其在輻照度變化范圍較大時, 其線性度更差。因此, 實際工程應用中, 校正方法必須作適當改進。
2 光電紅外搜索跟蹤系統成像分析
在軍事上,光電紅外搜索跟蹤系統通常采用制冷型紅外線陣探測器。空間紅外信號經掃描后通過光學系統聚焦在探測器焦平面上,焦平面上的感光像元將紅外光換轉換成電信號,通過A/D采樣變換成數字信號送信號處理電路進行非均勻性校正、消瞎元等處理后,一路以模擬視頻方式輸出顯示,一路以數字視頻方式送后級圖像處理板進行處理。
制冷型紅外系統100%的冷光闌效率是光學設計中需要努力實現的目標,即要保證系統的孔徑光闌與探測器的冷闌匹配,使探測器只能看到物空間,避免雜散光進入探測器。
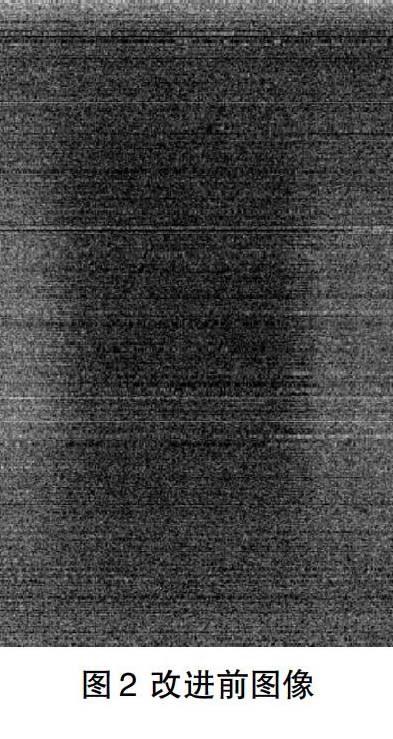
在紅外搜索跟蹤系統光學設計中,設計者將系統的孔徑光闌設置在探測器冷闌處,理論上保證了100%冷闌效率。但在工程實際中,由于調焦、光學裝調以及光學、機械公差累積等因素使系統的孔徑光闌與探測器冷闌不能完全匹配,致使系統內部的一些輻射(雜散光)照射到探測器的焦平面上,在四周區域形成一個“亮框”,成為固定的圖像干擾,傳統的基于線陣探測器的兩點定標非均勻校正算法無法解決這一問題。
圖2為均勻背景條件下光電紅外搜索跟蹤系統使用改進前的兩點定標非均勻校正算法后的輸出圖像畫面,存在“亮框”現象。
3 改進型算法
針對光電紅外搜索跟蹤系統成像這一“亮框”問題造成的圖像不均勻,本質上應從光學系統方面來著手解決。但由于光學系統設計、加工及生產周期長且成本高、裝調復雜,所以可以通過設計采用一種新型的非均勻校正方法從軟件方面著手來解決這一問題。
由于系統“亮框”現象是固定的圖像干擾,所以可以將目前的基于線陣探測器的兩點定標非均勻校正方法擴展為基于整幅圖像的面陣非均勻校正方法。其基本原理是:利用兩點定標非均勻校正方法得到探測器各像元的增益后,在均勻背景條件下對多幀圖像原始數據實時按點進行累加后求平均從而得到圖像每個點的原始數據平均值,則有:
(6)
式(6)中,為上一幅圖像所有原始數據的平均值,為實驗室黑體溫度分別為T1和T2時測量得到的線陣探測器各像元的增益,則為面陣非均勻校正方法下得到的基于圖像每個點的增益(其中,i為紅外線陣探測器的像元個數,n為圖像數據的個數)。
當紅外線陣探測器接收到實際目標場景輻照度時,利用公式(6)所得到的圖像每個點的增益對其輸出進行實時校正,如(7)式:
(7)
式(7)中,為圖像第個點的實時響應信號,為圖像第個點的校正后的輸出信號。
經過以上面陣非均勻校正算法處理后,系統圖像雜散光這一問題在圖像校正階段通過對偏置系數進行補償后,將“亮框”現象消除。
圖3為均勻背景條件下系統使用改進后的面陣非均勻校正算法后的輸出圖像畫面,“亮框”現象消除,圖像均勻性得到改善。
4 結語
紅外線陣探測器是光電搜索跟蹤系統的核心組件之一,其主要功能是采集空間紅外信息,經過非均勻校正等處理后輸出可供后級處理的紅外圖像,其圖像質量的好壞直接影響后級圖像處理組件對目標的識別能力,直接影響光電搜索跟蹤系統的探測和跟蹤性能。
本文中提出了一種針對光電搜索跟蹤系統使用紅外線陣探測器的改進型非均勻校正算法, 并且在現有光電雷達系統中進行了圖象校正試驗, 取得了良好的試驗效果,成功地解決了工程應用中光電雷達系統的孔徑光闌與紅外線陣探測器冷闌不匹配造成的雜散光現象,使圖像非均勻性得到改善,圖像質量得以提高。
參考文獻
[1]查鵬,沈學民,危峻,紅外線陣探測器非均勻性校正的DSP實現.科學技術與工程,2005(23):1832~1834.
[2]石巖,張天序,李輝,曹治國.一種考慮紅外焦平面器件非線性響應的非均勻性校正方法.紅外與毫米波學報,2004,23(4):251~256.
[3]周慧鑫,王炳健,劉上乾,拜麗萍.紅外焦平面器件非均勻性校正數字實現.系統工程與電子技術,2004,26(1),130~132.
[4]鐘云,孫娟.紅外焦平面技術發展概況.紅外技術,1991,13(6),1~6.
