一種高分辨率遙感影像車輛檢測方法
2016-05-14 09:09:49陳光門玉英翟東宇李芳吳德勝陳良超
軟件導刊 2016年7期
陳光 門玉英 翟東宇 李芳 吳德勝 陳良超
摘要:高分辨率遙感影像中車輛具有不同的光譜表現,同時車輛對象往往與道路交通標志保持近似的光譜特征,這使得高分影像車輛檢測通常面臨較大困難。針對以上問題,提出一種基于多方向形態學變換的車輛檢測方法,該方法由對象增強處理、候選對象提取、車輛對象特征驗證等3個步驟構成。所提出的集成多方向線狀結構元素的形態學頂帽(tophat)變換和底帽(bottomhat)變換分別實現了對亮色對象和暗色對象的增強處理,處理過程中同時顧及了車輛對象的幾何結構特征,抑制了非車輛對象的干擾。基于初步提取結果,引入了基于多特征的車輛驗證過程,進一步精確化車輛檢測結果。基于城區高分辨率遙感影像的車輛檢測實驗證明了該方法的有效性。
關鍵詞關鍵詞:車輛檢測;高分辨率;遙感影像;形態學
DOIDOI:10.11907/rjdk.161878
中圖分類號:TP317.4文獻標識碼:A文章編號文章編號:16727800(2016)007018103
0引言
高分辨率遙感影像中,車輛目標特征描述主要包括以下幾點:①位置特征:車輛的空間位置一定處于道路路面上,可根據道路范圍與對象的位置關系作為車輛判別的首要條件;②幾何特征:車輛幾何尺寸固定,對象的長度、寬度、面積以及縱橫比等幾何特性反映了車輛的規格,遙感影像中,車輛對象表現為橢圓形斑點;③紋理特征:車輛表面紋理相對均一,根據車輛自身的顏色特征,其與路面背景之間的對比度強弱不一;④光譜特征:不同車輛表面顏色不同,大多表現為高亮和灰暗兩類,很多車輛檢測方法將其分為亮色車與暗色車兩種。
高分遙感影像上的車輛特征提供了車輛檢測的線索,同時也預示了遙感車輛提取的難點與復雜性:亮色車可能同高亮的車道線、交通標志混淆;亮色車因深色車窗造成圖像上車身被割裂;暗色車的光譜特征易與瀝青等灰暗材質的道路面混淆;暗色車輛與自身陰影鄰近且不易區分。這些因素使車輛檢測變得更加復雜。學者們從不同角度提出了多種車輛提取方法。S·Hinz基于上下文知識,使用差分斑點探測器檢測可能存在的車輛目標;閾值分割和形態學預處理措施也常用于突出汽車特征,改善提取結果。
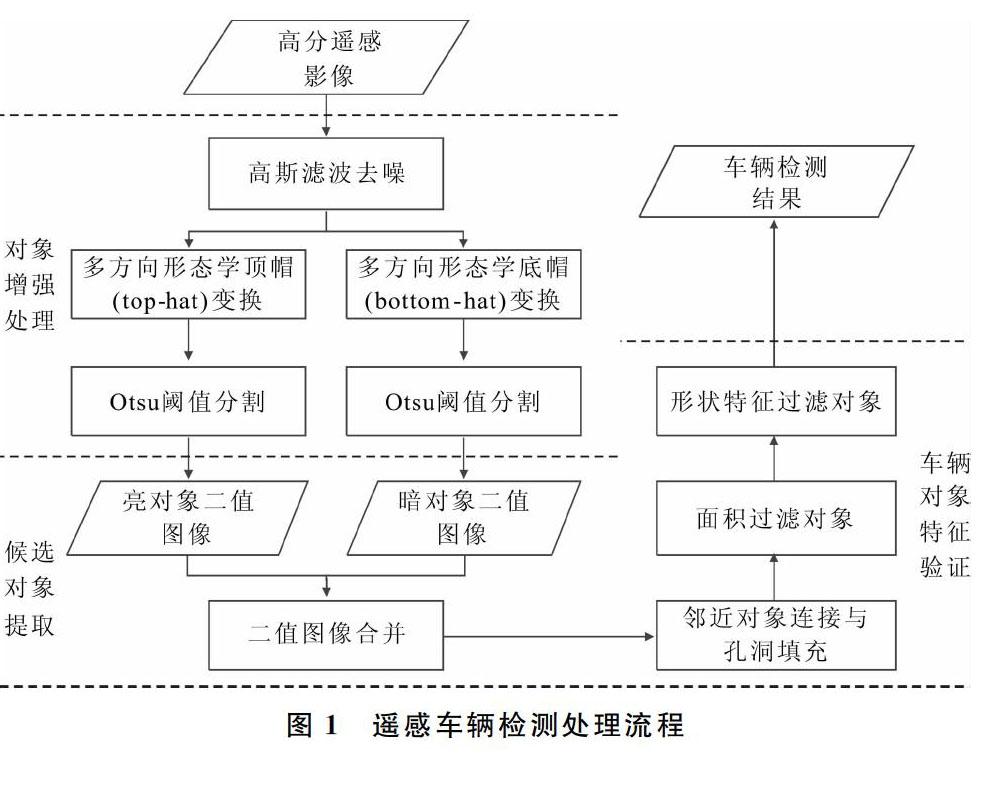
本文設計的道路提取方法包括對象增強處理、候選對象提取、車輛對象特征驗證等3個步驟,流程如圖 1所示。
1車輛預檢測
1.1對象增強處理
考慮到車體顏色差異,需要針對亮色和暗色車輛分別進行處理。形態學頂帽(tophat)變換和底帽(bottomhat)變換能夠增強圖像對比度以及凸顯圖像中的亮色對象和暗色對象。然而,由于車輛對象為矩形,并且車身方向不固定,確定合適的形態學結構元素大小較困難:結構元素偏大,會破壞對象的結構特征,造成形狀扭曲;結構元素偏小,則因無法覆蓋車輛而達不到增強的目的。本研究提出集成多方向線狀結構元素的形態學頂帽(tophat)變換和底帽(bottomhat)變換。
首先,按照特定角度間隔定義一系列線狀結構元素,基于這些結構元素分別對影像進行形態學開閉重構運算,開重構運算用于濾除相對于背景較亮的小尺寸(長度小于結構元素)對象,而閉重構則用于濾除較暗的對象,對應的算子公式如下:
其中,f為待處理圖像,R為形態學重構算子;f*=M-f,表示圖像f的最大灰度級M與f中各像元相減;Θ為形態學腐蝕算子;B(d,s)表示方向為d、長度為s的線狀結構元素;γref(d,s)表示對影像f執行基于結構元素B(d,s)的開重構處理結果影像;φref(d,s)表示對影像f執行基于結構元素B(d,s)的閉重構處理結果影像。如果f為多波段影像,則對各波段數據分別進行處理。
當結構元素方向與道路方向一致時,重構結果能夠在保持背景光譜特征的情況下濾除前景偏亮或偏暗的對象,將基于不同方向結構元素處理得到的結果影像進行融合,保證兼顧不同方向車輛對象,融合規則公式如下:
其中,MPob(x)表示對波段b的像素x進行開重構融合值;MPcb(x)表示對波段b的像素x進行閉重構融合值,其它變量說明同上。
重構實驗結果如圖3(a)、(d)所示,可以看出,重構后的影像中分別濾除了尺寸短于現狀結構元素的偏亮或偏暗對象。將重構后的影像與原影像作差值處理,實現對被關注地物的增強,如圖3(b)、(e)所示。
其中,fb為波段b對應的單波段影像;THb為對影像fb的頂帽變換影像;BHb為對影像fb的底帽變換影像。
1.2候選對象提取
增強后的影像中,亮對象與暗對象相對于背景的反差被增強,被關注物得以凸顯。分別對THb和BHb執行基于Otsu[6]的閾值分割處理,得到由候選對象構成的二值圖像,如圖3(c)、(f)所示。二值圖像中包括車輛、陰影、建筑屋頂等,需要通過進一步的特征驗證來檢測車輛對象。
2車輛對象特征驗證
在分析遙感影像中車輛特征時,已知車輛具有顯著的幾何特征,因此采用多個幾何特征組合來進一步檢測車輛。在驗證車輛對象前,首先需要對候選對象二值圖像進行預處理。根據前文分析可知,亮色車輛的車身會被前后車窗割裂。為避免檢測錯誤,對二值圖形進行形態學閉重構處理。車身結構決定了割裂后的部分均相互鄰近。因此,可以根據影像分辨率和現實中車輛的尺寸確定大小合適的結構元素,并保證處理后的車體部分相互連接。
車輛對象驗證選用的幾何特征包括:面積、長寬比、矩形度,公式如下:
Ra=LMER/WMER(7)
Rrect=mean(A/Amer)(8)
車輛對象的判定準則如式(9)所示,要求特征值在規定閾值范圍內,則判定為車輛對象,反之為背景對象。
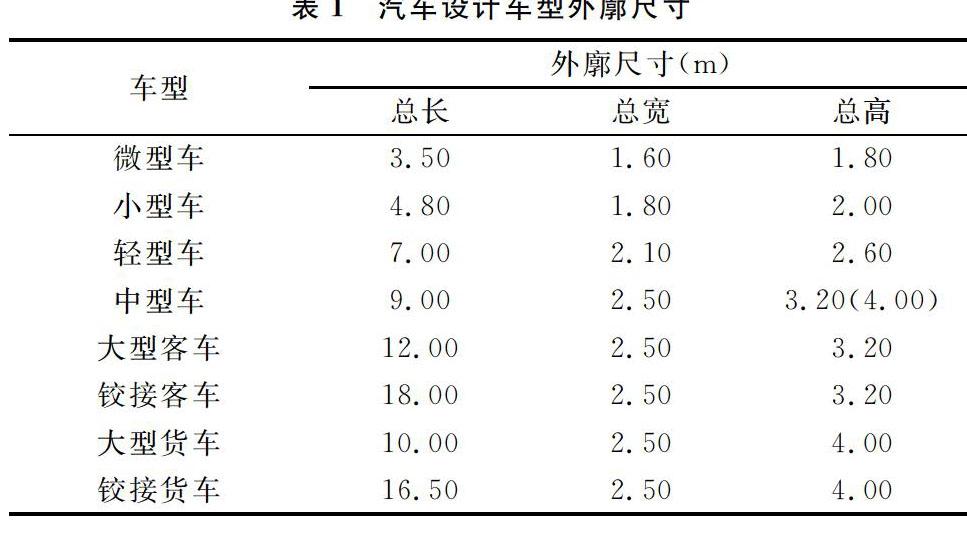
其中,Obji為對象的身份標識,當其取值為1時,標識當前對象為車輛;Ai,Ria,Rirect為第i個對象的面積、長寬比、矩形度;[TinfA,TsupA]為影像上車輛對象面積的取值范圍;[TinfLW,TsupLW]為車輛對象長寬比取值范圍;Trect為車輛對象最小矩形度閾值。閾值參數設置可參照汽車設計尺寸(見表 1[7])與影像分辨率。
實驗區域為深圳市城區局部,該區域為鬧市區,車輛密集,場景中干擾地物較多。實驗數據如圖2所示,數據描述信息如表2所示。
4結語
本文提出了一種基于多方向形態學變換的車輛檢測方法,該方法的核心是提出了集成多方向線狀結構元素的形態學頂帽(tophat)變換和底帽(bottomhat)變換,處理過程綜合利用了車輛對象的光譜特征和結構特征,創新性地分別對亮色車輛和暗色車輛進行增強和檢測,實現在抑制路面非車輛干擾對象的同時保留車輛對象。引入的基于多特征的車輛驗證過程實現在后處理階段對提取結果的二次驗證和判別,進一步精化車輛檢測結果。基于城區高分辨率遙感影像的車輛檢測實驗表明了本文方法的有效性。實驗結果中車輛密集區域的對象粘連問題會對提取結果造成一定的影響,后續將針對此問題開展進一步研究。
參考文獻:
秦彥光. 高分辨率遙感圖像道路網及車輛信息提取. 長春:吉林大學, 2014.
曹天揚,申莉. 應用光照模型的交通車輛識別定位的高分辨率遙感方法[J].測繪學報,2015(1): 3945.
HINZ S, LEITLOFF J, STILLA U. Contextsupported vehicle detection in optical satellite images of urban areas\[Z\].20052937.
LARSEN S O, SALBERG. Automatic vehicle counts from quickbird images\[Z\].IEEE, 2011912.
余勇,鄭宏. 基于形態神經網絡的高分辨率衛星影像車輛檢測[J]. 哈爾濱工程大學學報,2006, 27(z1): 189193.
OTSU N. A threshold selection method from graylevel histograms[J]. IEEE Transactions on Systems, Man and Cybernetics. 1979, 9(1): 6266.
Gb. 道路車輛外廓尺寸、軸荷及質量限值\[S\].北京:中國國家標準化管理委員會,20040401.
責任編輯(責任編輯:陳福時)