衛(wèi)星導(dǎo)航系統(tǒng)接收機原理與設(shè)計
——之五(下)
2016-05-16 09:51:17劉天雄
衛(wèi)星與網(wǎng)絡(luò) 2016年3期
關(guān)鍵詞:信號
+ 劉天雄
?
衛(wèi)星導(dǎo)航系統(tǒng)接收機原理與設(shè)計
——之五(下)
+ 劉天雄
4.5.1.2搜索空間
信號捕獲(截獲)的實質(zhì)是一個在偽碼域(不同的衛(wèi)星)、偽碼相位域(與信號傳播時延有關(guān))和載波頻移域(與多普勒頻移有關(guān))上的一個三維空間搜索過程。GPS、Galileo和北斗衛(wèi)星導(dǎo)航系統(tǒng)均采用CDMA碼分多址(Code Division Multiple Access)信號技術(shù),星座中所有導(dǎo)航衛(wèi)星信號多路復(fù)用在同一個載波頻率上,而每顆衛(wèi)星對應(yīng)一個唯一的偽隨機噪聲碼(先驗信息),即偽隨機噪聲碼與導(dǎo)航衛(wèi)星一一對應(yīng),并作為空間在軌衛(wèi)星的唯一識別號SV number(Space Vehicle Number)。偽碼確定后,則退化為一個在偽碼相位和載波頻移域上的二維空間搜索過程。
由于導(dǎo)航衛(wèi)星在空間圍繞其軌道作高速圓周運動,衛(wèi)星與接收機之間存在相當(dāng)大的相對運動而導(dǎo)致衛(wèi)星播發(fā)的導(dǎo)航信號產(chǎn)生多普勒頻移,為覆蓋衛(wèi)星高速運動所長生的預(yù)期中的所有多普勒頻移,接收機一般需要需在±10kHz范圍內(nèi)搜索導(dǎo)航信號。捕獲需要一定的時間,整個頻率搜索帶內(nèi)可以分成若干個頻率間隔,通常選定頻率間隔為500Hz,這樣在20kHz頻段內(nèi)就有41個不同的測試頻率段。一般接收到的導(dǎo)航信號與本地復(fù)制偽碼信號的相位也是不同的,如果接收機中的偽碼相位步進是半個碼片(chip),對于GPS L1 C/A碼信號,整個短碼相位的搜索需要2046次相關(guān)運算。以GPS系統(tǒng)為例,GPS接收機一般是同時進行偽碼捕獲與載波捕獲的二維搜索,既要保證頻率在搜索的誤差范圍(1kHz)之內(nèi),同時還要保證C/A碼相位相差不到半個碼片(Tc/2),這樣才能保證搜索到衛(wèi)星信號。導(dǎo)航信號搜索過程如圖32所示。
接收機基于不同的“偽碼延遲和多普勒頻移對”(code delay / Doppler frequency pairs),接收機生成不同的本地復(fù)制PRN碼(偽碼)信號,然后分別與接收到的導(dǎo)航PRN碼信號進行相關(guān)處理,當(dāng)本地復(fù)制PRN碼信號與接收到的PRN碼導(dǎo)航信號“對齊”,即兩個PRN碼相位一致時,信號相關(guān)處理時將得到相關(guān)峰,導(dǎo)航信號捕獲結(jié)果如圖33所示(出現(xiàn)相關(guān)峰),與相關(guān)峰對應(yīng)的偽隨機碼延遲量為650個碼片(chips)、多普勒頻移為-1750 Hz,“偽碼延遲和多普勒頻移對”被認(rèn)為是對信號初始跟蹤(tracking)過程的最優(yōu)估計。
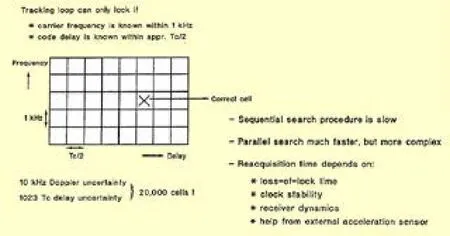
圖32 導(dǎo)航信號的搜索過程
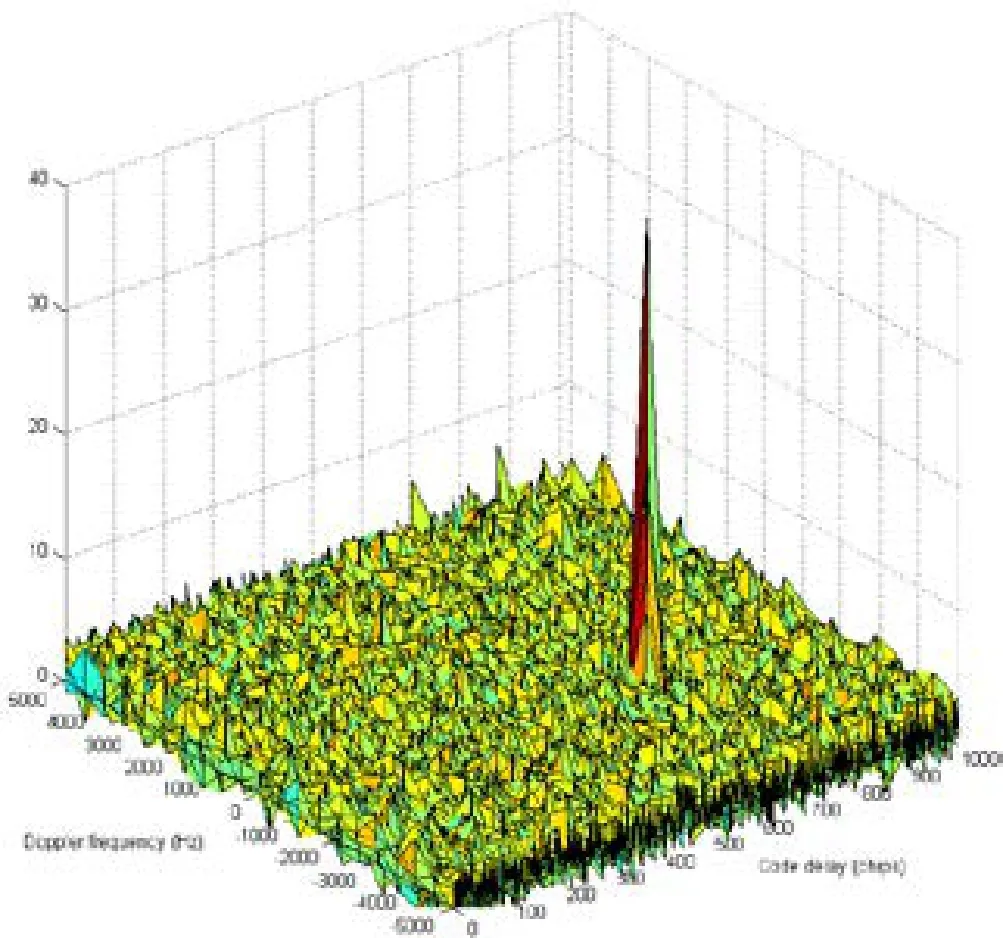
圖33 導(dǎo)航信號捕獲結(jié)果
接收機一般同時接收到多顆導(dǎo)航衛(wèi)星播發(fā)的信號,每個導(dǎo)航信號具有不同的C/A測距碼起始點和不同的載波頻率(因多普勒移而變化)。接收機的每路基帶信號處理通道同時只能處理一顆衛(wèi)星播發(fā)的一路導(dǎo)航信號,捕獲過程就是要找到信號中C/A測距碼起始點和載波頻率,為信號跟蹤提供初始化條件。
4.5.1.3捕獲算法
導(dǎo)航接收機在跟蹤導(dǎo)航信號載波頻率和偽碼相位之前必須知道載波頻率和偽碼的粗略估計值,并且估計值必須小于鎖相環(huán)PLL和延遲鎖定環(huán)DLL的牽引范圍,然后接收機才能對接收信號進行牽引和鎖定,最后進入穩(wěn)態(tài)跟蹤狀態(tài)。
為了跟蹤上某顆導(dǎo)航衛(wèi)星播發(fā)的信號,接收機必須搜索可見范圍內(nèi)的衛(wèi)星(信號),如前所述,每顆導(dǎo)航衛(wèi)星對應(yīng)一個唯一的偽隨機噪聲測距碼(簡稱測距碼或偽碼),接收機根據(jù)預(yù)先存儲的所有導(dǎo)航衛(wèi)星的測距碼,通過相關(guān)處理,很容易找到這顆衛(wèi)星信號的測距碼,設(shè)置可見衛(wèi)星的測距碼后,接收機對導(dǎo)航信號的載波頻率和偽碼相位進行二維掃描式搜索,即導(dǎo)航衛(wèi)星信號的捕獲是一個偽碼相位和載波頻移域上的二維捕獲過程,對導(dǎo)航信號的捕獲過程,既要保證頻率在搜索的誤差范圍之內(nèi),同時還要保證C/A碼相位相差不到半個碼片,這樣才能保證搜索到衛(wèi)星信號。
由于導(dǎo)航信號中存在噪聲,信號所在單元(偽碼延遲和多普勒頻移對)的功率值有可能受到削弱,出現(xiàn)相關(guān)峰值的單元也不一定是最優(yōu)估計,因而在一個搜索單元上獲得一次概率值超過門限值時不能立即結(jié)束信號捕獲過程,否則虛警率會偏高。從捕獲到信號相關(guān)峰值到進入信號跟蹤狀態(tài)之間需要一個確認(rèn)峰值的過程,這個過程就體現(xiàn)在捕獲算法中,捕獲算法有很多種,其中滑動相關(guān)法使用最為廣泛,滑動相關(guān)法又有時域和頻域兩種算法。
(1)時域信號捕獲算法signal acquisition in time domain
時域線性滑動相關(guān)捕獲算法是常用的導(dǎo)航信號時域捕獲算法,基于偽碼相位和載波多普勒頻移的二維線性搜索,以一個碼相位和多普勒頻移步長單元作為信號搜索單元格,在一次搜索過程中,需要考慮每一個可能的頻率和碼片延遲,通過相關(guān)處理得到相關(guān)功率峰值來不斷地調(diào)整接收機本地生成的載波頻率和偽碼相位來實現(xiàn)本地復(fù)制信號和接收信號的匹配。
偽碼相位和載波多普勒頻移二維線性搜索策略一般有并行搜索、串行搜索和序貫估計三種,其中時域滑動相關(guān)捕獲算法流程簡單,硬件實現(xiàn)容易,目前大部分接收機都采用這種捕獲算法,時域串行搜索流程如圖34所示,但是當(dāng)偽碼延遲較大或者在高動態(tài)環(huán)境下,信號搜索時間過長,捕獲速度較慢。
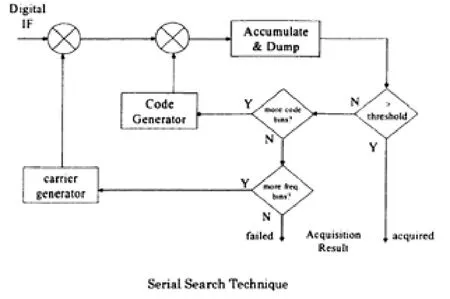
圖34 導(dǎo)航信號時域串行搜索流程
時域線性滑動相關(guān)捕獲過程為:根據(jù)可見衛(wèi)星預(yù)測估算出多普勒頻移搜索范圍,選擇搜索頻域內(nèi)范圍內(nèi)的中間點,在此頻點下數(shù)字中頻信號(digital IF)和本地載波產(chǎn)生的相互正交的I和Q兩路分量相乘,以剝離載波,得到的兩路信號再與本地復(fù)制的偽碼相乘,以剝離偽碼,輸出I和Q兩路相互正交的功率值。將一個偽隨機測距碼周期的兩路信號積分累加得到非相干積分值,將I和Q兩路非相干積分值平方求和即得到相干積分功率值,最后通過相干積分功率值與預(yù)先設(shè)定的捕獲門限值來比較判斷信號成功捕獲與否。超過門限則為捕獲到該衛(wèi)星信號,否則移動到下一個搜索單元重復(fù)上述過程,直到搜索到功率峰值或結(jié)束對次顆衛(wèi)星信號的搜索。門限是判定衛(wèi)星是否可見的重要衡量標(biāo)準(zhǔn),其門限值的確定對捕獲來說是至關(guān)重要的。
(2)頻域信號捕獲算法signal acquisition based on FFT
頻域并行捕獲算法中,常用的是基于快速傅立葉變換(FFT)的頻域圓周相關(guān)快速捕獲算法,是適應(yīng)高動態(tài)環(huán)境,可以大幅度減少偽碼捕獲時間的方案,即采用多普勒頻移串行捕獲,由FFT代替?zhèn)未a滑動相關(guān)的二維并行捕獲策略。根據(jù)快速傅立葉變換(FFT)的位置可以分為基于偽碼相位域的FFT并行捕獲算法和基于載波頻率域的FFT并行捕獲算法。
頻域捕獲算法的本質(zhì)是在頻域進行連續(xù)不斷卷積,在某一個多普勒頻率搜索單元開展所有偽碼相位搜索,對接收到的導(dǎo)航信號中的測距碼序列和接收機本地生成的測距碼序列做循環(huán)卷積。根據(jù)信號在處理中的離散傅立葉變換圓周相關(guān)定理,如果將時域的循環(huán)卷積轉(zhuǎn)換到頻域完成,則只需對接收到的導(dǎo)航信號中的測距碼序列和接收機本地生成的測距碼序列分別作FFT處理,然后對其中的一組FFT序列做共軛處理,再將兩者相乘,通過快速傅立葉反變換(IFFT),即可得到兩個序列在所有相位上的相關(guān)峰值,原理如下:

信號長度為N的導(dǎo)航信號x(n)的離散傅立葉變換(DFT)為:

接收機本地復(fù)制信號h(n)與導(dǎo)航信號x(n)的相關(guān)函數(shù)可以表示為,其中,

相關(guān)函數(shù)z(n)的離散傅立葉變換(DFT)為:
然后對進行離散傅立葉反變換反變換(IDFT),即可得到相關(guān)函數(shù)z(n)的時域表達(dá)式,然后可以計算得到相關(guān)函數(shù)z(n)模的最大值,由此可以判定輸入的導(dǎo)航信號x(n)與接收機本地復(fù)制信號h(n)的相關(guān)性在何時最強,這樣就可以找到導(dǎo)航信號測距碼的起始位置。
頻域并行捕獲過程為:根據(jù)可見衛(wèi)星預(yù)測估算出多普勒頻移搜索范圍,選擇搜索頻域內(nèi)范圍內(nèi)的中間點,在此頻點下數(shù)字中頻信號(digital IF)和本地載波產(chǎn)生的相互正交的I和Q兩路分量相乘,以剝離載波,之后會得到I和Q兩路信號,再與本地復(fù)制的偽碼分別作相關(guān)處理,將I路作為實數(shù)部分Q路作為虛數(shù)部分,將這個新的數(shù)據(jù)(I+jQ)作FFT變換,變換結(jié)果反映了時域中信號相關(guān)結(jié)果I+jQ在各個頻率成分處的強度,如果本地復(fù)制的測距碼的相位與信號中測距碼的相位不一致,則低相關(guān)性會抑制信號幅值,由此判定接收信號不再此碼相位對應(yīng)的搜索頻帶。頻域并行偽碼相位搜索流程如圖35所示,
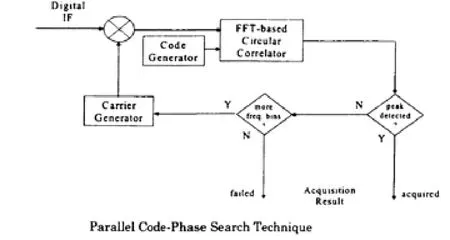
圖35 導(dǎo)航信號頻域并行偽碼相位搜索流程
基于載波頻率域的FFT并行捕獲算法信號搜索流程如圖36所示,數(shù)字中頻信號(digital IF)和本地載波產(chǎn)生的相互正交的I和Q兩路分量相乘,以剝離載波,得到I和Q兩路信號與本地復(fù)制的偽碼分別作相關(guān)處理,將I路作為實數(shù)部分Q路作為虛數(shù)部分,將這個新的數(shù)據(jù)(I+jQ)作FFT變換,接下來將數(shù)據(jù)取模求平方和,將所得的值與門限進行比較,大于門限的即可認(rèn)為捕獲到該衛(wèi)星(信號)。

圖36 導(dǎo)航信號頻域并行載波頻率搜索流程
論文選登
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
