一種高精度線陣ccd二維自準直儀四狹縫目標中心的定位方法
2016-05-18 09:18:41董彥維賈軍強劉希強段祉鴻
導彈與航天運載技術 2016年1期
董彥維,賈軍強,萬 琦,劉希強,段祉鴻
(1. 北京航天發射技術研究所,北京,100076;2. 中國航天科工集團公司二院二部,北京,100084)
一種高精度線陣ccd二維自準直儀四狹縫目標中心的定位方法
董彥維1,賈軍強2,萬 琦1,劉希強1,段祉鴻1
(1. 北京航天發射技術研究所,北京,100076;2. 中國航天科工集團公司二院二部,北京,100084)
為滿足高精度線陣ccd二維自準直儀動態高精度測量,提出一種高精度線陣ccd二維自準直儀四狹縫目標中心的定位方法,首先采用高斯濾波對ccd圖像進行平滑處理,在抑制噪聲的同時生成帶有高斯加權的ccd圖像,然后采用線性插值質心法對加權圖像進行目標中心亞像素定位。實驗結果表明,該定位方法穩定性好,定位精度高且實時性強,在原理樣機上,應用該方法實現了單次二維角度測量時間小于0.2 s,測量范圍±900″,在±300″內相對于進口eLcOMaT3000示值誤差優于±0.5″,具備工程應用價值。
高精度線陣ccd;二維自準直儀;高斯濾波;線性插值質心法;亞像素定位
0 引 言
光電自準直儀作為一種高精度瞄準及小角度測量儀器,在航天發射地面瞄準和定位等方面有著不可替代的作用[1]。光電自準直儀具有較高的測量精度和穩定性[2],ccd自準直儀是其典型代表。高精度線陣ccd二維自準直儀是以高精度線陣ccd作為光電傳感器實現二維小角度的動態高精度測量。常用的亞像素定位方法有質心定位法[3]和線性插值質心法[4]等,但都有自己的局限性:只能處理特定目標中心圖像,并且存在易受噪聲干擾和運算量大等問題。因此,高精度線陣ccd二維自準直儀的研制,需要尋找一種快速高精度線陣ccd二維自準直儀四狹縫目標中心定位方法。線陣ccd成像系統中的量化噪聲近似服從高斯分布[5],采用高斯濾波能很好地抑制圖像噪聲。為了實現二維小角度快速高精度測量,本文提出一種高精度線陣ccd二維自準直儀四狹縫目標中心的定位方法。首先采用高斯濾波對ccd圖像進行平滑處理,在抑制噪聲的同時生成帶有高斯加權的ccd圖像,然后采用線性插值質心法對加權圖像進行目標中心亞像素定位。
1 自準直儀測量原理
自準直儀以自準直原理為基礎[6],用測微系統對被測件進行角位移精密測定,其原理如圖1所示。
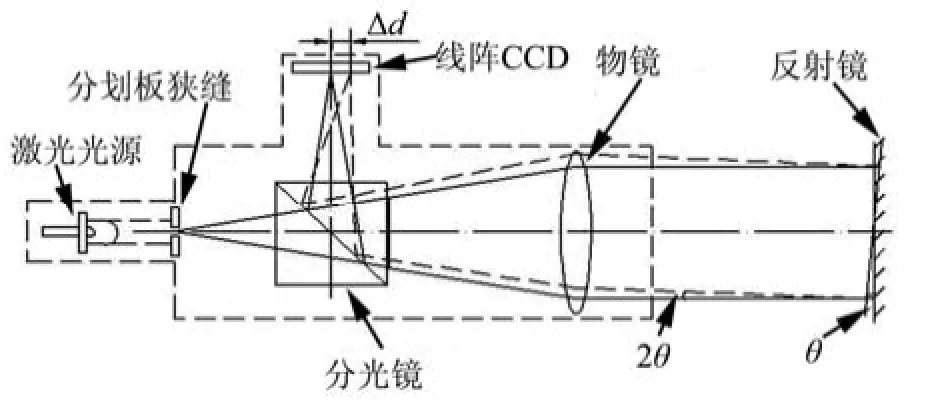
圖1 自準直儀測量原理
當激光光源發送光束照亮位于物鏡焦平面上的分劃板狹縫,通過分光鏡和準直物鏡后形成一束平行光射向被測反射鏡,當反射鏡面垂直于光軸時,光束仍然原路返回,由準直物鏡匯聚,經分光鏡成像于線陣ccd上;當被測反射鏡發生小角度變化時,分劃板狹縫在線陣ccd上所成的像將產生線位移,由此可以計算相應的小角度變化。反射鏡發生小角度變化θ,則在線陣ccd上成像產生位移Δd,根據幾何光學原理,有:Δd=f·tan2θ,其中,f為物鏡焦距。當被測角θ很小,約小于15′時,測量公式近似為Δd=f/2θ,則:

由式(1)可知,只要能精確測量線陣ccd的像位移Δd,即可精確測量小角度θ。為了實現測量反射鏡的二維角度變化,需要增加1束激光光源、1塊分光棱鏡和1片線陣ccd。通過控制光源切換和信號采集,實現二維角度測量。
2 四狹縫目標中心亞像素定位方法
目前最常用的中心定位亞像素算法是質心法,其算法簡單且定位精度較高,但是它只能處理目標面積區域適中的圖像,并且受噪聲干擾較大,當圖像信噪比較小時,它的定位誤差會變大[7]。線陣ccd成像過程中的隨機噪聲近似服從高斯分布。高斯濾波對服從高斯分布的噪聲有很好的濾波效果,同時還能保留圖像細節。因此,為了降低噪聲對算法精度的影響,提高系統精度,首先采用高斯濾波進行預處理,生成帶有高斯加權的ccd圖像,然后采用線性插值高斯加權質心算法對高斯加權的ccd目標圖像中心進行亞像素定位。
2.1 高斯濾波預處理算法[8]
圖像濾波是通過原始輸入圖像f( x, y)與脈沖響應h( x, y)的卷積來實現,即:

式中 ?為卷積運算符;(,)g x y為經過濾波后的輸出圖像。式(3)的離散形式為

因此,卷積變成對像素點的加權計算,脈沖響應[,]h i j是一個卷積模板,21m+和21n+是卷積模板的二維寬度。對圖像中的每一個像素[,]i j,輸出響應[,]g i j通過平移卷積模板到每個像素點[,]i j處,計算模板與像素點[,]i j鄰域加權得到。其中各加權值對應卷積模板的各對應值。
高斯卷積模板是一種線性模板,可直接從二維零均值離散高斯函數計算模板權值[9]。二維零均值離散高斯函數表達式為

式中 σ為高斯函數的均方差,控制平滑效果。σ值越大,平滑程度越好,但同時也造成圖像特征過分模糊(圖像細節的丟失),一般選取σ=1~10。例如,取σ=1,為了減少實際運算量,卷積模板的二維寬度取3×3,圖2為式(5)產生的高斯卷積模板示意。
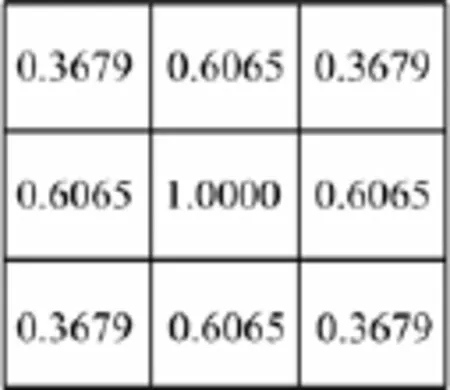
圖2 3×3二維高斯卷積模板
為方便計算,一般將模板權值取整。其過程是取模板最小權值(在模板的角點處),選擇系數k使得最小權值為1。如式(5)中:

對k取整為3。這樣,用k值乘以模板所有權值,并取整得到圖3所示的整數值高斯卷積模板。

圖3 3×3整數值二維高斯卷積模板
圖3中高斯卷積模板的權值之和不等于1,意味著高斯卷積處理提高了整幅圖像的灰度,并改變了圖像直方圖。所以,在進行圖像平滑處理時,像素點的輸出值必須用模板的權值歸一化處理。在式(5)中:

所以,經高斯卷積平滑濾波后的輸出圖像為

二維高斯模板的數學表達式為

式(9)可以分解成兩個一維的高斯函數,對應一個二維高斯模板,可以將其分解成2個一維高斯模板的卷積,如圖4所示。
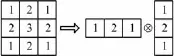
圖4 高斯模板分解示意
在高精度線陣ccd二維自準直儀原理樣機上實際采用的是一維高斯模板,如圖5所示。

圖5 實際應用的1×3高斯模板
實驗中,一個線陣ccd采集到的四狹縫目標圖像減去固定閾值后的圖像如圖6所示。從圖6可以看出,由于系統噪聲的影響使圖像的邊緣不平滑。采用圖5所示的一維高斯模板平滑濾波后的圖像如圖7所示。從圖7可以看出,經過高斯平滑濾波后的圖像邊緣非常平滑,對系統噪聲起到了很好的抑制作用。采用1×3高斯模板,運算量小,實時性強。
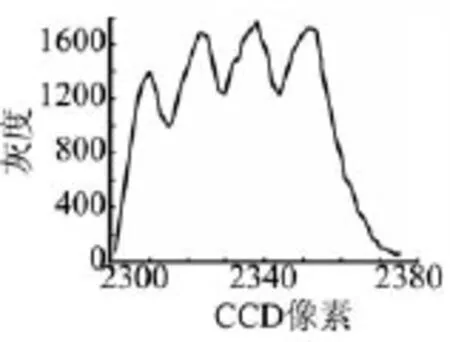
圖6 原始ccd圖像
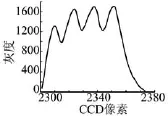
圖7 經過高斯平滑濾波后的ccd圖像
2.2 線性插值高斯加權質心算法
利用1×3高斯模板可以快速有效抑制高精度線陣ccd圖像的噪聲,同時保留圖像細節。為了進一步提高二維自準直儀的定位精度,兼顧定位算法的實時性,本文采用線性插值高斯加權質心算法對四狹縫目標中心進行快速亞像素定位。
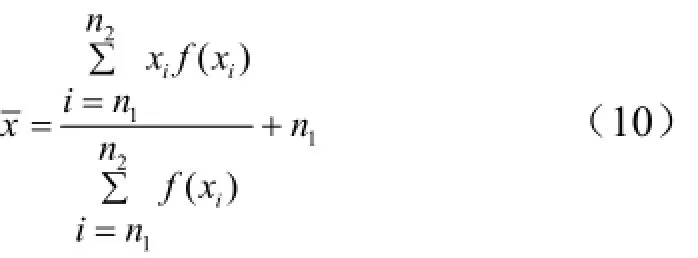
為了減少數據處理量、提高處理速度,對四狹縫目標圖像減去固定閾值后的ccd圖像進行中心定位,用傳統質心算法求目標中心為[10]
在質心定位過程中,噪聲對定位精度有較大影響,因此采用高斯加權的質心定位具有較高的去噪聲能力[8]。在質心定位中不采用原圖像像素灰度值而是采用高斯濾波后的灰度值進行計算。故由式(10)得到的高斯加權質心算法為
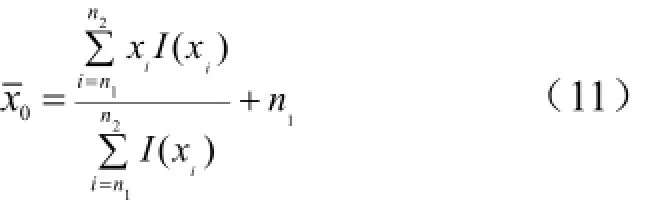
其中,
目標中心的定位精度與目標圖像灰度的輪廓和信噪比有很大關系,因此,可以通過插值的方法在目標成像區域增加一些可利用的點,提高質心定位精度。由于Lagrange多項式得到的線性插值最為簡單,實用性強,對噪聲的抑制、圖像質量的提高效果較好[10]。因此,本文選用Lagrange線性插值。根據線性插值理論,設點xi,xi+1的帶高斯加權的灰度值分別為I( xi),I( xi+1),插值點為v,則:

其中,

經過插值運算后,目標圖像的中心可由下式計算:

3 結果及數據分析
采用本文提出的定位方法,已在高精度線陣ccd二維自準直儀原理樣機上成功實現了快速精確亞像素定位。為了驗證該定位方法的精度和速度,選用德國穆勒公司的eLcOMaT 3000型自準直儀進行對比。在±300″范圍內,x軸和y軸測量的對比結果與誤差分別見圖8和圖9。
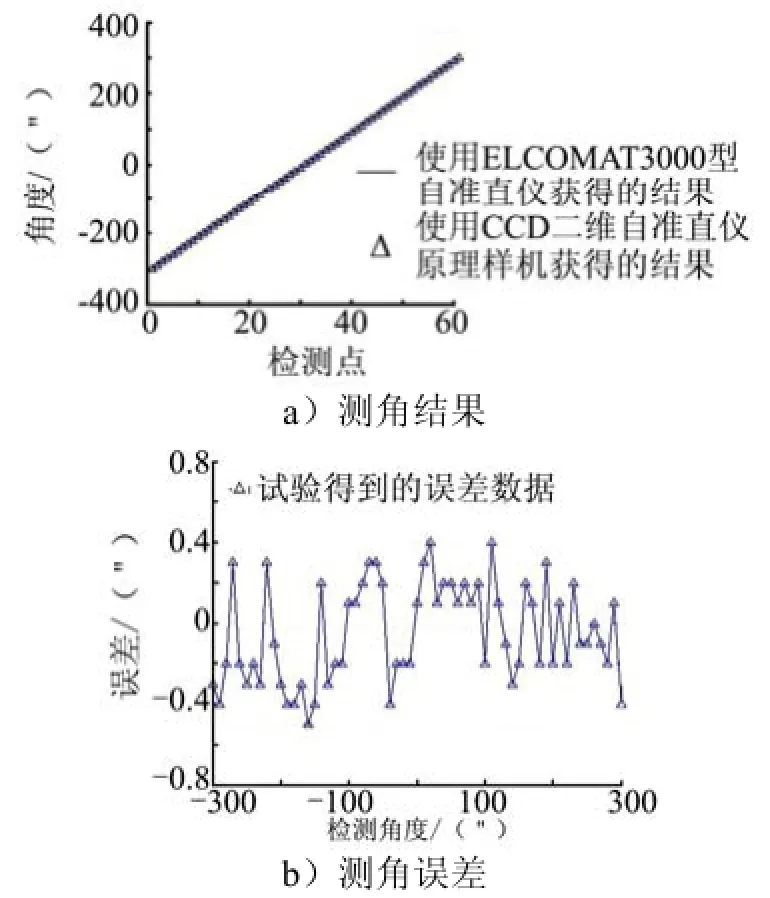
圖8 x軸測角結果與測角誤差
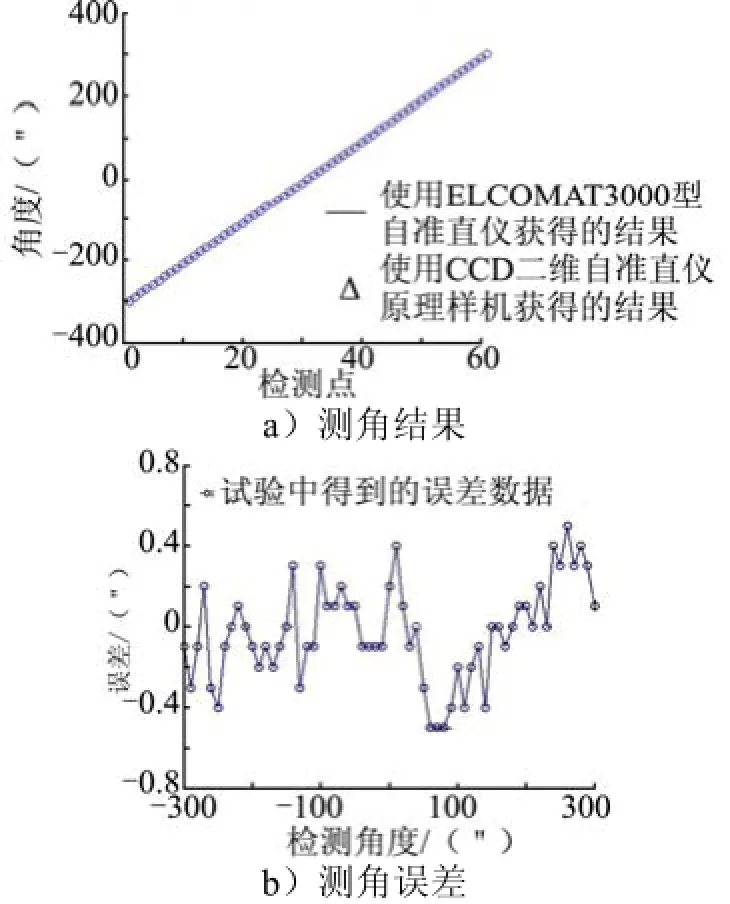
圖9 y軸測角結果與測角誤差
eLcOMaT 3000在全量程(±1 000″)范圍內示值誤差不超過0.25″,在任意20″內示值誤差不超過0.10″。比較結果非常接近,測得原理樣機X軸和Y軸測量范圍±900″,在±300″內相對于進口eLcOMaT 3000示值誤差優于±0.5″,單次二維角度測量時間小于0.2 s,實現了快速高精度二維角度測量。
4 結 論
本文提出一種基于高精度線陣ccd二維自準直儀四狹縫目標中心的亞像素定位方法,首先采用高斯濾波對ccd圖像進行平滑處理,在抑制噪聲的同時生成帶有高斯加權的ccd圖像,然后采用線性插值質心法對加權圖像進行目標中心亞像素定位。在原理樣機上,應用該方法實現了單次二維角度測量時間小于0.2 s,測量范圍±900″,在±300″內相對于進口eLcOMaT3000示值誤差優于±0.5″。實驗結果表明,該定位方法穩定性好,定位精度高且實時性強,具備工程應用價值。
[1] 敖磊, 譚久彬, 崔繼文, 等. 一種快速高精度激光ccd自準直儀圓目標中心的定位方法[J]. 光學學報, 2007, 27(2): 253-254.
[2] 張明麗, 劉立人, 萬玲玉,等. ccd掃描檢測光束準直度[J]. 光學學報, 2005, 25(8): 1067-1071.
[3] Jie Y, Long X. ccd-area-based autocollimator for precision small-angle measurement[J]. Review of Scientific Instruments, 2003, 74(3): 1362-1365.
[4] 賀俊吉, 張廣軍. 結構光三維視覺檢測中光條圖像處理方法研究[J]. 北京航空航天大學學報, 2003, 29(7): 593-597.
[5] 丁曉華,李由,于起峰,等. ccd噪聲標定及其在邊緣定位中的應用[J].光學學報, 2008, 28(1): 99-104.
[6] 歐同庚, 陳志高, 楊博雄, 等. ccd光電自準儀工作原理及誤差源分析[J]. 大地測量與地球動力學, 2007, 27(S1): 98-100.
[7] 劉兆蓉, 王志乾, 劉紹錦, 等. 激光光斑中心精確定位算法研究[J]. 計算機仿真, 2011, 28(5): 399-400.
[8] 張廣軍. 視覺測量[M]. 北京: 科學出版社, 2008.
[9] Kohl T R. Vision tutor lab guide[M]. Massachusetts: amerinex artificial Intelligence, 1992.
[10] 尚學軍, 何明一, 王軍良. 基于線陣ccd的光斑定位算法研究[J]. 激光與紅外, 2008, 38(7): 730-731.
A High-accuracy Location Method for 4-Reticle Target Center of Linear Array CCd 2-axis Autocollimator
dong Yan-wei1, Jia Jun-qiang2, Wan Qi1, Liu Xi-qiang1, duan Zhi-hong1
(1. Beijing Institute of Space Launch Technology, Beijing, 100076; 2. The Second department of the Second academy, china aerospace Science & Industry corporation, Beijing, 100084)
To realize the dynamic high-accuracy measurement of high-accuracy linear array ccd 2-axis autocollimator, a high-accuracy location method for 4-reticle target center of high-accuracy linear array ccd autocollimator is proposed. First, ccd images are processed with Gauss-filter, which diminishes the noise and generates weighted images. Then, the sub-pixel location of weighted image’s target center is acquired accurately by using barycentre method based on linear polynomial interpolation.experimental results show that the proposed method is stable and accurate. appling the method on the prototype, as a result, the measuring time of a single 2-axis angle measurement is less than 0.2s. The measure scope is ±900″. The proposed method can efficiently fulfill the requirements in engineering systems.
High-accuracy linear array ccd; 2-axis autocollimators; Gauss-filter; Barycenter method based on linear polynomial interpolation; Sub-pixel location.
V556
a
1004-7182(2016)01-0081-04
10.7654/j.issn.1004-7182.20160119
2014-08-11;
2015-04-23
董彥維(1979-),男,工程師,主要從事定位定向、光電瞄準和圖像處理研究