基于PLC和PID的人工造浪監控系統的研究*
2016-05-25 00:37:35黃學飛
網絡安全與數據管理 2016年3期
關鍵詞:系統
黃學飛
(廣州鐵路職業技術學院 機械與電子學院,廣東 廣州 510430)
基于PLC和PID的人工造浪監控系統的研究*
黃學飛
(廣州鐵路職業技術學院 機械與電子學院,廣東 廣州 510430)
針對氣動造浪系統的特點及運行的需要,設計了基于PLC(Programmable Logic Controller)和PID技術的氣動造浪監控系統。采用PLC完成了多點造波風罩的壓力數據采集和對人工造浪系統的現場控制,采用PID技術實現了造波風罩壓力的精確測量和對控制系統實現恒壓控制,并建立了氣動造浪系統上位機軟件用戶模塊。使用該具有PID反饋的系統不僅保證了氣動造浪系統正常運行,而且具有節能效果,也為開發人工氣動造浪系統提供了良好的啟示和借鑒。
氣動造浪系統;PLC;PID
0 引言
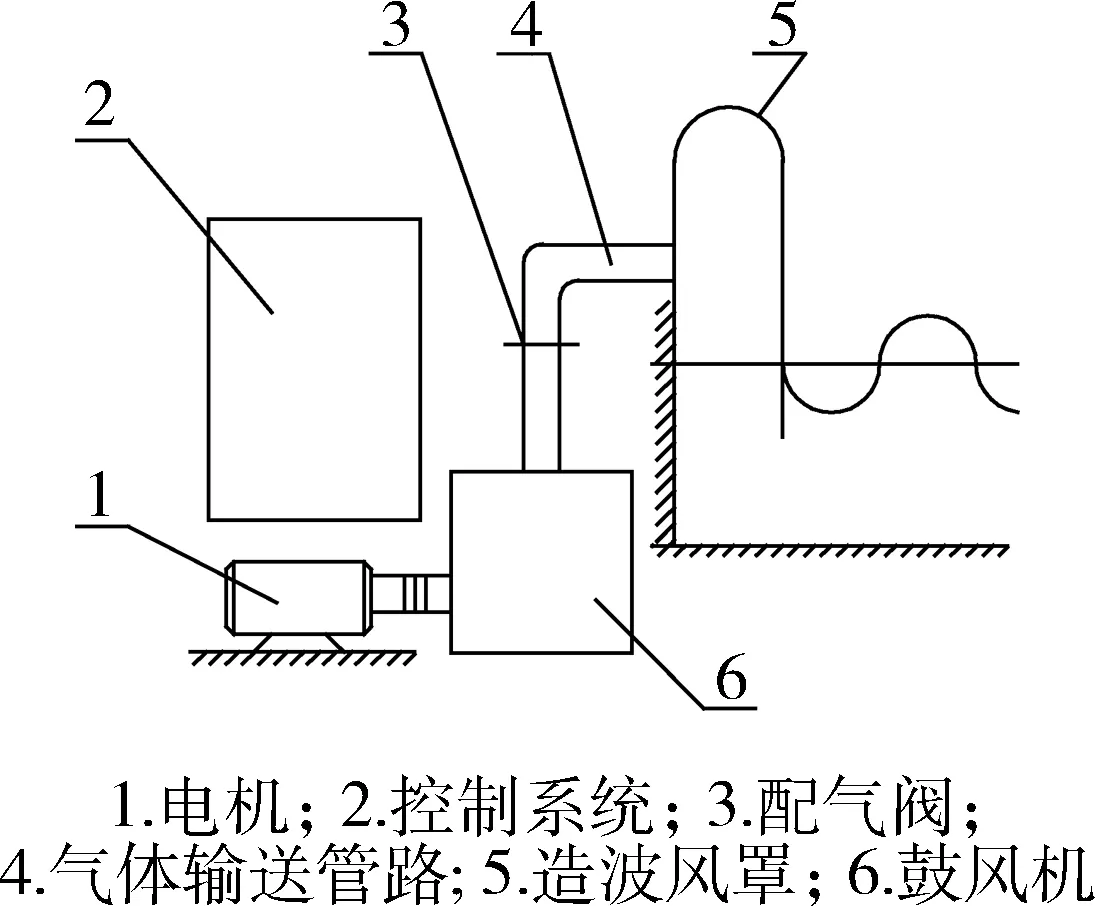
圖1 人工造浪系統的結構圖
人工氣動造浪系統主要包括電機和鼓風機組成的空氣供給系統、氣體輸送管路、造波風罩、布置在管路上的配氣閥和對應的控制系統等,系統的結構圖如圖1所示。工作時,通過電機轉動帶動鼓風機正常工作,從而產生高壓氣體,氣體通過配氣閥控制造波風罩氣流的周期性變化實現造浪。配氣閥門每一個工作周期均分為兩個半周期,在前半周期空氣自大氣壓入風罩,而水便從風罩內排出,在風罩前形成波峰;而后半周期空氣返回大氣,水被吸入風罩,即在風罩前形成波谷[1]。壓力是造浪過程中主要的控制參數之一,壓力的大小直接影響到造浪的效果,在不同的壓力下產生的浪的形態也會不同,因此研究壓力大小與造浪的關系對氣動造浪系統具有重要的意義。目前,人工造浪控制系統基本上是采用PLC控制,控制過程比較單一,能耗比較大。在控制過程中,基本上通過對電機采用變頻調速控制,無壓力反饋,系統有時由于一些原因會造成風罩內壓力不夠,由此形成不了所需的波形,從而造成人工造浪失敗。為保證形成所需的波形,有的廠家在系統運行過程中會增大所需要的壓力來保證系統正常運行,從而無形中造成能耗損失。為此,本文開發了基于PLC和PID技術的一種新型的人工造浪監控系統。
1 控制系統總體設計

圖2 控制系統的結構圖
本文提出的控制系統是在原來系統的結構上,為了得到壓力反饋,在造波風罩上增加了三組壓力變送器,從而使控制系統的總體構成如圖2所示。該控制系統主要由上位機監控系統、PLC控制系統、變頻器、風機、壓力傳感器、閥門分配系統等組成。系統運行控制過程中,上位機監控系統通過RS232與RS485轉換器向PLC控制系統發出運行控制指令,PLC控制系統根據運行指令控制風機的運行,從而產生高壓氣體。同時PLC控制系統控制閥門分配系統,并根據系統運行的需要調節高壓氣體是否進入造波風罩,在造波系統的前半周期中高壓氣體通過閥門分配系統進入造波風罩,從而在風罩前面產生波峰;在造波系統的后半周期中氣體通過閥門分配系統排出造波風罩,從而在風罩前面產生波谷。在產生波峰的過程中,通過壓力傳感器來調節風機的變頻器,以此控制進入風罩的高壓氣體壓力。
在本系統中,控制系統需要較快的運算速度和較強的運行能力,而S7-300 PLC采用模塊化結構,具備高速(0.6~0.1 μs)的指令運算速度,可以用浮點數運算,比較有效地實現了更為復雜的算術運算等功能特點,所以選用S7-300 PLC作為系統的主要控制核心。在本系統中采用S7-300 PLC的PID控制功能塊FB 41。壓力傳感器采用佛山市賽普特電子儀器有限公司的PTP702高壓壓力傳感器,該傳感器的彈性體采用特殊進口材質、線切割機加工工藝,一體化結構設計,適用于大型液壓設備等的壓力測量與控制,可以滿足本控制系統的需要。
2 PID系統的工作原理
PID系統的工作原理如圖3所示。

圖3 PID系統的工作原理圖
具體工作原理:在控制過程中,系統根據波浪的形態,在風罩內采用不同的壓力。當系統處于前半周期時,系統將給風罩增加空氣的壓力。在增加風罩的空氣壓力時,壓力傳感器會將測量的壓力通過變送器轉變成電信號,通過信號線送到PLC的CPU中,PLC控制系統根據風罩壓力的給定值與反饋回的實際值進行比較,如果測得的壓力低于設定的風罩壓力,系統通過對參數運算,調整PID的參數[2],按照PID運算規律計算出結果,然后控制系統將根據計算結果控制變頻器頻率,系統增大變頻器頻率,從而增大風機的轉速,進而增大風機輸出的空氣壓力。如果達到了風罩的壓力,壓力傳感器將此時的壓力信號轉變為電信號傳給PLC后,控制系統將停止給變頻器輸出頻率,將暫停增大風機的轉速,從而使風罩的壓力在滿足使用條件的前提下節省能源。改進前的系統在造浪系統達到設定的風罩壓力后,系統的風機一直按設定的輸出頻率轉動,為穩定風罩的壓力,系統通過排出空氣的方式進行卸壓,這樣不僅制造了大量的噪音,而且浪費了大量的能源。
當系統運行某一波型的壓力時,系統在前半周期會通過控制系統將風罩的壓力穩定在所需的壓力。直至系統在后半周期時釋放壓力。如此周而復始,從而在保證系統滿足所需壓力的情況下確保不會浪費過多的能量。
該控制系統的壓力在反饋過程中采用了單閉環的PID數字控制技術,使PID的參數調整實現在線控制,人工造浪系統實現了穩定的壓力輸出,從而保證波型的形成,并在保證系統達到穩定壓力的同時使系統能夠以較低能耗運行,從而達到節能運行系統的目的。
3 系統實現
3.1 上位機監控系統
上位機監控系統主要實現實時顯示氣動造浪系統的運行狀態、管理整個系統的運行和對采集的數據進行分析處理。主要模塊包括實時監控和報警、系統參數配置、系統運行管理、系統用戶管理、系統數據分析、系統權限管理、系統數據管理、用戶管理等功能模塊。如圖4所示。
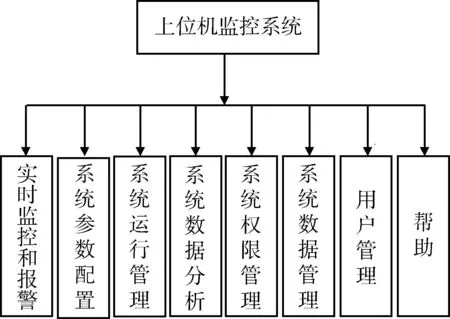
圖4 上位機監控系統軟件功能模塊結構圖
上位機監控系統選用DELPHI2012作為系統的編程軟件。DELPHI2012是一種優秀的編程工具,具有功能強大、簡便易用和代碼執行速度快等優點。該開發工具不僅具有可視化的特點,而且具有強大的數據庫支持、與Windows編程緊密結合、強大而成熟的組件技術、簡單易學等特點[3]。數據庫采用微軟開發的SQL。監控中心系統與數據庫的數據交互采用ADO數據庫訪問技術。
上位機監控系統主要功能是顯示氣動造浪過程中運行實時狀態、采集和處理氣動造浪過程中的空氣壓力數據等。為保證這些任務具有實時性,需要系統支持多任務和并行處理多任務。在開發上位機監控系統時采用了多線程技術。根據上位機監控系統運行需求,上位機監控系統需要如下幾個線程:系統主線程、數據采集線程、數據處理線程等。這些線程保證了系統的正常運行和系統的實時性,提高了系統運行的可靠性。其中,系統主線程是系統從開始運行到系統結束運行的線程,該線程主要負責氣動造浪系統顯示運行狀態、查詢上位機監控系統的數據及對系統進行交互操作;數據采集線程主要是系統采集PLC控制系統發送回的數據,該線程在監控系統開機后一直運行;數據處理線程是系統單獨建立的一個線程,主要任務是處理通過PLC控制系統傳回的數據,并根據數據的狀態對系統進行相應的處理,處理完畢后根據需要將數據保存在SQL數據庫中,該線程自數據采集線程運行后開始運行。由于采集的數據處理過后需要保存在數據庫中,計算機在處理這一過程中,需要花費一定的時間,而采集數據的速度也很快,為保證數據能正確保存在數據庫中而不出錯,在系統中建立了臨時內存機制,將需要保存的數據臨時保存在內存中。在采集數據的同時也可以處理數據和保存數據,實現了采集數據和保存數據“同步”進行。
3.2 PLC控制系統
本控制系統采用西門子S7-300 PLC作為控制核心,采用指令編制系統程序。本控制系統的程序可分為三部分:主程序、子程序和中斷程序。子程序包括人工造波浪前半周期控制子程序和后半周期的子程序,中斷程序主要運行在前半周期,這個程序首先要完成壓力數據的采集,并根據控制系統的給定值,完成在線數字PID運算,并根據運算結果把控制量輸出到風機的變頻器,從而控制風機的電機,最終實現風罩壓力的恒壓控制和系統正常運行。系統主程序流程圖如圖5所示。
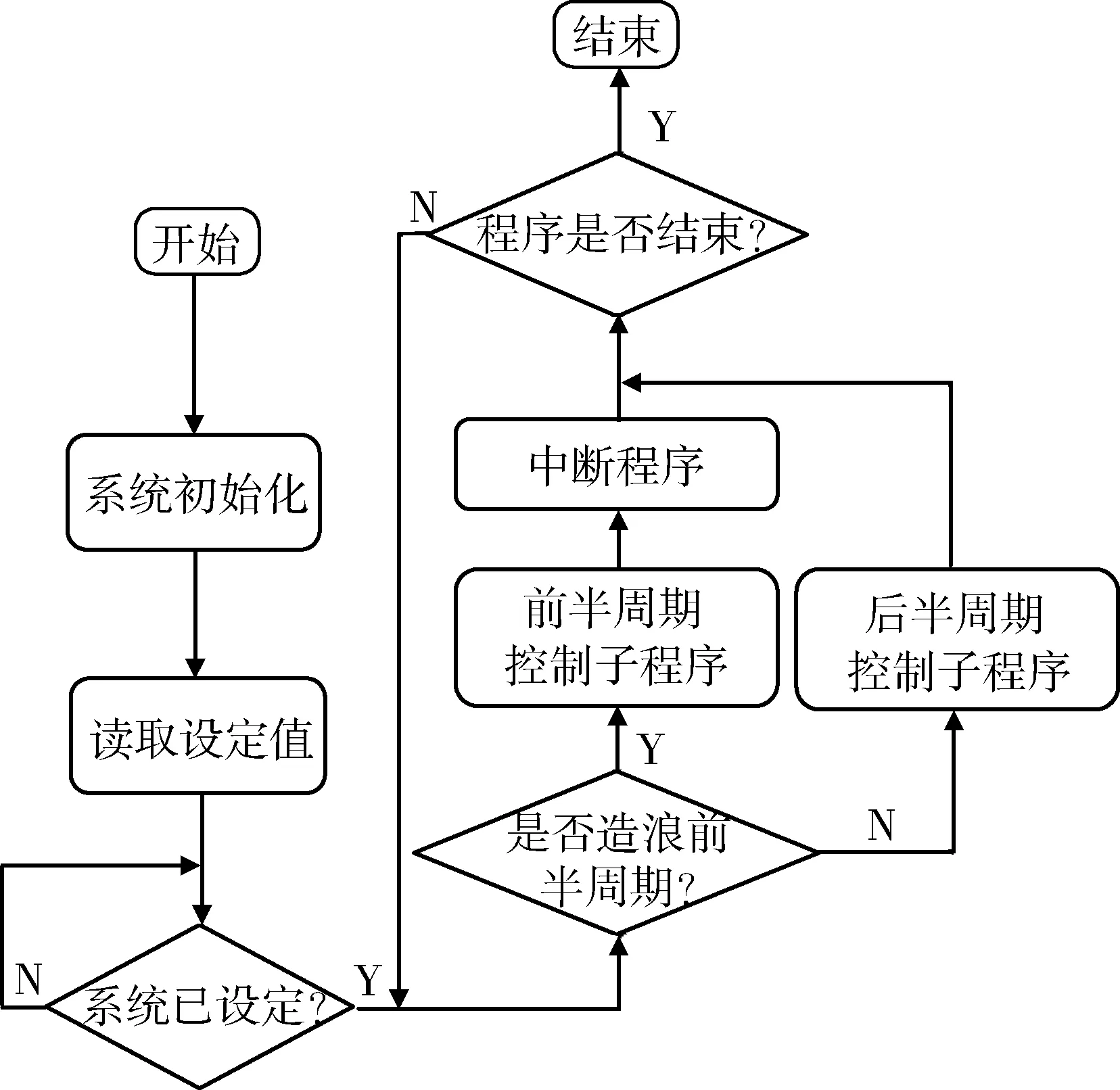
圖5 系統主程序流程圖
3.3 上位機監控系統與PLC控制系統連接
上位機監控系統與PLC控制系統連接采用RS-485串行總線技術。由于RS485串行通信方式采用一對平衡雙絞線作為傳輸媒體,具有多點雙向通信能力,允許多個發送器連接到同一條總線上,具有傳輸距離長、傳輸速率高、抗干擾能力強、控制方便且成本低廉的特點,故得到了廣泛的應用[4]。由于上位機監控系統與PLC控制系統距離較遠,故采用RS-485串行總線技術。因為采用的上位機沒有485接口,只有232接口,所以上位機與PLC控制系統連接中需要RS232和RS485的轉換器,以保證系統正常連接。在通信過程中,通過調用PRODAVE S7軟件包的動態鏈接庫實現氣動造浪監控系統的上位機監控系統與PLC控制系統的讀寫操作。上位機監控系統用到的PRODAVE函數主要有load_tool、unload_tool、db_read、db_write四個。其中,load_tool 用于PC機與PLC系統初始化鏈接;unload_tool用于斷開PC機與PLC系統鏈接;db_read用于從PLC的DB塊中讀數據字;db_write用于向PLC的DB塊中寫數據字。上位機監控系統通過靜態引入方式訪問PRODAVE動態鏈接庫DLL(DynamicLinkLibrary)中的例程,即在單元的Interface部分用External指示字列出要從DLL中引入的例程[5]。
4 系統調試
為檢驗該系統運行過程中的可靠性和實時性,在某公司開發的造浪池對本系統進行現場安裝調試。將開發的系統安裝到現場,并根據現場對程序的部分參數進行了調整。在系統運行過程中,采用不同的波形(左右浪、排浪、鉆石浪、搖擺浪等)進行測試,經過多次測試,當系統達到設計的參數時,系統都能夠正常實現所需的波形,并對浪高、造浪間隔、波形等實現自動控制。同時與之前系統相比,系統在運行過程中能耗大大減少。現場測試表明,該系統性能表現比之前系統效果更加良好,系統也更穩定、可靠。
5 結束語
提出了基于PLC的人工造浪監控系統,在系統中采用了PID數字控制技術,利用現場測試的壓力作為反饋參數對系統進行控制,同時上位機對人工造浪系統進行實時監控。通過試驗表明,該系統不僅滿足了系統的使用要求,而且比現有人工造浪監控系統更加節能。該監控系統的應用,提高了人工造浪監控系統的可靠性和實時性, 在人工造浪領域值得推廣應用。
[1] 王秋旺.造波機在水上樂園的應用[EB/OL].(2010-08-07)[2015-10-13]http://wenku.baidu.com/view/fd08a30a79563c1ec5 da71b6.html.
[2] 王恩義,羅先喜,王甲甲,等.基于PID算法的智能溫控系統設計與實現[J].微型機與應用,2014,33(12):18-20,24.
[3] 明日科技,梁水,李方超.Delphi開發技術大全[M].北京:人民郵電出版社,2007.
[4] 王研.基于RS485的PLC與變頻器通信實現[J].現代機械,2010(4):41-42,37.
[5] 姜建芳,蘇少鈺,陳慶偉,等.西門子S7-300系列PLC與PC機通信實現的研究 [J].制造業自動化,2003,25(1):52-54.
Research of artificial wave-maker monitoring system based on PLC and PID
Huang Xuefei
(College of Mechanical and Electronic,Guangzhou Institute of Railway Technology, Guangzhou 510430,China)
According to the characteristics of pneumatic making waves system and the needs of operation, pneumatic wave-maker monitoring system was designed based on PLC and PID. The multi point wave hood pressure data acquisition was got, and it could realize local control the artificial wave system by PLC. It realized accurate measure on the wave hood pressure and the constant pressure control on control system using PID technology, and epigynous machine software user module of the pneumatic wave system was built. The system with PID feedback not only ensures the normal operation of pneumatic wave system, but also has the effect of energy saving, and it provided a good inspiration and reference for the development of similar systems.
pneumatic wave-maker system;PLC;PID
廣州市屬高校科研計劃項目(2012A096)
TP29
A
1674- 7720(2016)03- 0072- 03
黃學飛. 基于PLC和PID的人工造浪監控系統的研究[J].微型機與應用,2016,35(3):72- 74.
2015-10-13)
黃學飛(1974-),男,碩士,講師,主要研究方向:機電一體化技術。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32