
多功能環境監測無人機系統設計
2016-05-25 11:59:40劉祥林維昌
科技視界 2016年12期
關鍵詞:系統
劉祥 林維昌
【摘 要】針對目前在人員難以進入區域的環境實時監測與信息采集,設計了一種可以投放傳感節點的無人機系統。此系統主要由無人機與地面站兩大分系統構成,通過ZigBee與無線串口的信息互聯方式來進行實時數據的采集與監測上傳。在整體系統中無人機擔任定點投擲平臺、空中信息采集平臺與數據傳輸中轉平臺;地面站系統負責人機交互,交互信息包括傳感信息、地圖信息、視頻信息與控制信號。此外,無人機可搭載攝像頭與GPS模塊分別進行視頻信號的上傳與衛星地圖的測定顯示。在整體系統搭建完成后,通過對整體系統的現場測試,此系統可基本達到設計要求,實現一機多用。
【關鍵詞】環境監測;旋翼無人機;ZigBee;地面站
【Abstract】In order to make the environmental real-time monitoring and information collection in hard-to-reach locations. A new UAV (Unmanned aerial vehicle)system is designed, which can put the sensing nodes in the area. This system consists of the UAV and the ground station, which make the real-time acquisition and monitoring upload through the ZigBee and wireless serial interconnected. The UAV play a role in fixed-point throwing platform, air data collection platform and data transfer platform in the whole system. The ground station system is responsible for human-computer interaction, and the interactive information includes transducer information, maps information, video information and control signal. In addition, the UAV can carry camera for video upload and GPS module for map show. After the overall system completed and tested, this system can meet the desired requirement, and achieved the multi-usage.
【Key words】Environmental monitoring; Rotor unmanned aerial vehicle; ZigBee; Ground station
0 引言
隨著近些年來一系列環境災害與環境事故頻發,環境保護被日益重視,環境監測技術的研究越來越引起國內外政府學者的重視。近些年來,無人機已成功用于水環境監測,空氣質量監測、有害物質泄漏監測等。縱觀環境監測無人機的研究,環境監測無人機除了進行遙感操作外,還應加強對地面環境信息的直接采集。通過對地投放傳感器節點,或利用已在地面部署好的傳感器節點進行信息獲取,構成天地一體的監測網絡。這就要求無人機系統應具有傳感器節點的投放和定位能力,以及良好的組網通信能力。同時還應提高無人機的飛行效率,爭取做到一機多用。
本文闡述了一種多功能環境監測無人機系統,無人機將監測節點空投至需要監測的區域,并和所布置的節點通信,在人員難以進入的地區實現無線傳感網的快速部署,無人機在完成上述任務的同時還可以利用自身攜帶的傳感器和攝像頭對沿途區域進行環境信息采集,為環境動態監測提供更多的信息獲取途徑。
1 系統功能設計
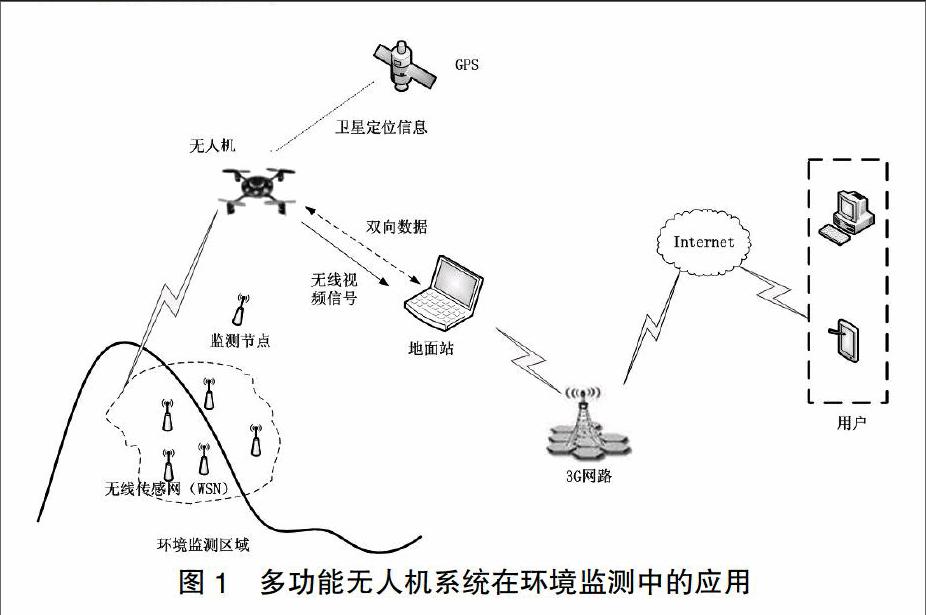
本文所提出的多功能環境監測無人機系統在整個環境監測系統中的應用如圖1所示。無人機通過自主飛行飛至監測目標區域,進行遙感信息采集等常規操作,還可以投下傳感器節點。所投放的傳感器節點自身不帶定位裝置,而是通過無人機對所部署的傳感器節點進行定位,地面站負責對無人機下達各種任務,跟蹤監視無人機的動作情況,獲得各種信息參數。傳感器節點部署完成后,可組成無線傳感網(WSN),與無人機一起構成天地一體的環境監測系統。
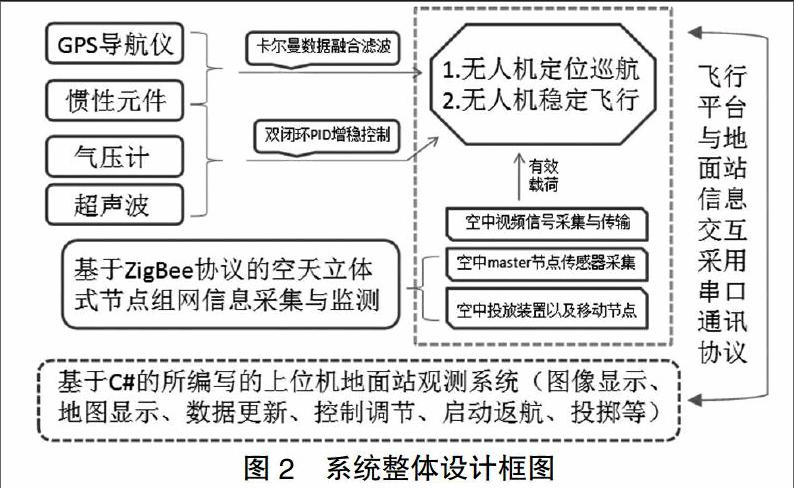
系統整體設計框圖如圖2所示,系統主要由無人機和地面站構成。無人機采用多軸旋翼結構作為飛行平臺,利用GPS導航及慣性元件為無人機提供飛行姿態參數,在導航系統的設計中,采用了INS/GPS組合導航方式,使用卡爾曼濾波器對低速率的GPS導航解與高速率INS系統輸出的數據進行組合處理,對INS系統的誤差做出估計并校正后給出組合導航參數。搭載了視頻采集與無線視頻傳輸模塊,可實現針對目標區域的圖像遙感操作,無人機上設有投放裝置可以完成監測節點的投放,監測節點采用ZigBee協議通信,并能和無人機上的Master節點通信。地面站系統應用程序采用C#語言編程,通過數傳電臺地面站可以同無人機進行雙向通信,及時獲取相關信息并向無人機發布命令。
2 系統硬件設計
2.1 無人機飛行結構設計
目前的多軸旋翼無人機主要有四軸和六軸的機架結構。四軸飛行器作為一種欠驅動系統,控制方式獨特、復雜。六軸飛行器作為一個完全驅動系統,其控制穩定性較四軸飛行器要高且對于動力系統失效的容忍程度也會上升,六軸旋翼無人機能夠在單發甚至雙發失效的狀況下仍然可控。本設計采用六旋翼無人機作為系統的飛行平臺。
2.2 無人機的航電系統設計
圖3給出了無人機的航電系統構成。微控制器單元(MCU)選用微控制器STM32F405RG,負責完成運算和控制,慣性導航器件用來采集無人機的飛行姿態。衛星定位模塊采用u-blox公司的NEO-6M模塊,慣性導航器件包括三軸陀螺儀MAX21000和三軸加速度計LSM303D,同時選用高分辨率氣壓傳感器MS5611作為高度計,這些模塊一起為無人機提供自身定位和飛行姿態信息。伺服系統負責驅動無人機運行,其中無刷電機選取4008KV400電機,無刷電調選取30A旋翼專用電調。投放裝置完成環境監測節點的投放。無人機上的攝像頭采集實時圖像通過無線視頻傳輸設備送地面站使用,地面站通過數傳電臺可以和無人機進行雙向無線通信。系統中傳感器節點和定位裝置采用支持ZigBee協議的CC2530芯片構成。
2.3 節點投放裝置
投放裝置如圖4所示,固定銷可在支架內做平行移動,通過舵機帶動連桿機構完成固定銷的打開和閉鎖。簡單且可靠性高。通過給予舵機一路脈寬調制波形(PWM)的不同數值來實現舵機不同的打角度數,帶動機械結構實現節點連接件的釋放,通過節點自身重力,下沉到目標地面地點,完成投放。
3 系統軟件設計
3.1 無人機飛行控制軟件設計
1.無人機的控制系統主要分為兩個回路:位置控制回路和姿態控制回路。姿態控制回路使無人機按照設定姿態飛行,未知控制回路使無人機能夠向指定目標飛行。系統采用經典的PID控制算法實現兩個回路的控制。
2.由于慣性導航系統(INS)提供的參數比其他的導航方式要齊備,但容易隨時間積累而產生誤差,衛星導航系統(GPS)的精度高,然而容易受環境的影響。無人機導航采用GPS/INS組合導航,該組合具有很強的互補性,GPS能夠消除INS的積累誤差,INS能夠在GPS信號失鎖時提供短時精確的定位。GPS/INS組合導航系統以數據融合理論作為基礎,以卡爾曼濾波作為主要融合方法,對進入組合系統的GPS定位數據與INS定位數據分別進行估計、修正、融合,來解決GPS信號失鎖引起的無法定位問題和INS積累誤差引起的長時間漂移問題。
3.超聲避障是利用機載超聲波探測,來實現對旋翼無人機飛行隱患安全的提前判除與實時糾正,使得旋翼無人機生存力大大提高。系統應用環境的不確定性,增加超聲波障礙判斷來對飛行航跡上的危險體避除。在一定的情況下,應以系統安全為主,因此超聲波判定優先級大于導航優先級。
3.2 節點定位系統軟件設計
對所投放節點的定位問題可以看成單移動錨節點的節點定位問題,目前的定位算法大致分為無需測距算法和基于測距算法兩類,其中基于接收信號強度指示(Received Signal Strength Indication,RSSI)的定位方法就是一種基于測距的定位方法,該方法無需額外硬件,成本低,在無線傳感器網絡定位算法中被廣泛使用。本系統使用ZigBee協議在進行投放節點之間的數據采集傳輸與機載master主節點之間進行協議通訊,支持ZigBee協議的CC2530芯片本身能夠提供RSSI數據,無人機能夠實時獲得各傳感器節點的RSSI數值,然后再通過優化算法來尋找未知節點的坐標估計值使得定位誤差最小,完成對所投放節點坐標的定位。
3.3 地面站系統軟件設計
地面站系統應用程序采用c#編程,分為三個模塊:通信模塊、電子地圖模塊和視頻顯示模塊。通信模塊負責地面站與無人機的數據交互通信,無線通信范圍可達數公里,當無線聯絡失效時,無人機能夠自動返航,飛回的起飛位置;電子地圖模塊負責航跡在電子地圖上的顯示,采用百度地圖所提供的API來實現電子地圖功能;視頻顯示模塊負責將無線視頻接收模塊接收回的視頻信號顯示在相應的視圖窗口中。
4 結語
由于無人機具有成本相對較低、無人員傷亡風險、生存能力強、機動性能好、使用方便等優勢,使得無人機在環境監測領域有著廣闊的應用前景,但在現階段市場還處于尚未形成規模的初級階段。本設計提出的多功能環境監控無人機系統將豐富目前的環境應急監控管理手段,為快速準確獲取事件現場各類環境信息提供有力支撐,具有廣闊的市場和良好的應用前景。
【參考文獻】
[1]楊海軍,黃耀歡.化工污染氣體無人機遙感監測[J].地球信息科學學報,2015,17(10):1269-1274.
[2]靳雷,劉洋,張碩,韓冰.無人機遙感系統在某河流域環境監測項目中的應用[J]. 環境保護與循環經濟,2013,33(8):55-57.
[3]王風.基于CC2530的ZigBee無線傳感器網絡的設計與實現[D].西安電子科技大學,2012.
[4]李大威.卡爾曼濾波在INS/GPS組合導航中的應用研究[D].中北大學,2006.
[5]劉慶元,郝立良,黃書捷,等.改進的 UKF 在 GPS/INS 組合導航中的應用[J]. 測繪科學技術學報,2014,31(5):450-453,458.
[6]李俊,李運堂.四旋翼飛行器的動力學建模及PID控制[J].遼寧工程技術大學學報(自然科學版),2012,32(1):114-117.
[7]李國柱.基于PSO的測距模型參數估計三維定位算法[J].計算機測量與控制,2014,22(9):2853-2855.
[8]馮震,李懷兵,丑武勝.旋翼微小型無人機地面站系統的設計與實現[J].計算機工程,2010,36(23):243-245.
[9]杜傳明.百度地圖API在小型地理信息系統中的應用[J].測繪與空間地理信息,2011,34(2):152-153,156.
[責任編輯:楊玉潔]
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
