海南聯網海底電纜綜合檢測水下定位方式研究
2016-05-28 03:18:07宮厚誠
科技與創新 2016年9期
宮厚誠


摘 要:海南聯網海底電纜在運行過程中受到海流沖刷、船只拋錨等多種外界風險影響,因此需要對海纜進行綜合檢測。使用ROV搭載檢測設備檢測時,需要給ROV和探測設備提供精確的水下定位,以保證檢測精度。主要分析了三種水下定位系統(長基線定位系統、短基線定位系統、超短基線系統)的原理、優缺點和適用性。由分析結果可知,使用超短基線定位系統能夠滿足海南聯網綜合檢測水下精確定位的需求。
關鍵詞:海底電纜;綜合檢測;水下定位;超短基線定位
中圖分類號:P715.5 文獻標識碼:A DOI:10.15913/j.cnki.kjycx.2016.09.009
海南聯網工程是我國第一個500 kV超高壓、長距離、大容量的跨海電網工程。聯網工程海纜部分北登錄端為廣東湛江徐聞南嶺村,穿越瓊州海峽到達南登錄端海南澄邁林詩島附近的玉包角,海底電纜長度約32 km/根,共3根,走廊寬度約2 km。海南聯網工程提升了海南電網運行的可靠性和供電質量,海底電纜的穩定性和可靠性對海南社會經濟的發展有著重要作用。
在海纜運行過程中,隨著時間的推移和海流的作用,海纜覆蓋層會受到沖刷,致使海纜裸露于海底,甚至在海底懸空;海纜附近的海洋作業會給海纜的正常運行帶來極大的風險。因此,對海底電纜進行定期的綜合檢測顯得非常有必要。其中,海纜埋深檢測、拋石石壩狀況及厚度檢測、海纜鑄鐵套管狀況檢測是非常重要的內容。為了獲取更加準確、詳細的海纜現狀細部資料,綜合檢測采用水下機器人搭載埋深探測設備(TSS系列)和錄像設備的方式進行,檢測過程中需要給ROV提供精確的定位信息,即需要進行較高精度的水下定位。
1 水下定位方法及原理分析
目前,水下導航定位技術以聲學導航定位技術為基礎,按照應答器基陣的基線長短劃分為三種聲學導航定位系統,分別是長基線定位系統、短基線定位系統和超短基線定位系統。
1.1 長基線定位系統
長基線定位是通過測量水下目標聲源到各個基元的時間差,解算目標的方位和距離,最終得出目標精確的三維位置,為水下施工、調查等工作提供精確的定位服務。長基線定位系統一般包括三部分,即船舶上的數據處理系統、安裝在定位目標或船舶上的聲學收發器、布放在海底且由多個收發應答器組成的定位基陣。
采用3個以上的應答器對安裝在測量船或水下機器人上的收發器進行定位,用(x,y,z)來表示水下機器人的三維坐標,用(xi,yi,zi)(i=1,2,3)來表示水下應答器的坐標Ti的坐標,Ri(i=1,2,3)為跟蹤目標與水下應答器的距離。圖1所示為長基線定位系統。
由收發器(水下機器人)和應答器的空間交會距離可以得出下式:
R22=(x-x2)2+(y-y2)2+(z-z2)2. (1)
求解方程組即可得到水下機器人的三維坐標。根據測量平差原理,在實際應用中,需接收4個以上海底應答器的信號,產生多余觀測,從而滿足最小二乘平差原理,提高測量精度。
1.2 短基線定位系統
短基線定位系統因基陣尺寸較小而得名,包括3個以上的基元構成,其基線長度一般超過10 m,通常工作在船底或布置在船舷上,利用聲信號在基元與目標之間的傳播時間差來計算,進而得到測量目標的方位和距離信息,推算出目標的坐標。
圖2所示為短基線定位系統的配置。在圖2中,H1,H2和H3為水聽器,O為換能器(它也是船體空間直角坐標系的中心)。水聽器成正交布設,Hl和H2之間的基線長度為b,指向船首,即X軸方向。H2和 H3之間的基線長度為by,平行于指向船右的Y軸,Z軸指向海底。設聲線與三個坐標軸之間的夾角分別為θmx,θmy和θm z,而△t1、△t2分別為H1和H2以及H2和H3接收的聲信號的時間差(圖中僅以H1和H2為例)。
根據方位-距離法,由圖3可直接得出目標物坐標的計算公式:
y=S·cosθm. (2)
1.3 超短基線定位系統
超短基線定位系統安裝在一個收發器中,組成聲基陣。精確測定聲單元之間的距離,組成聲基陣坐標系。在安裝時,要精確測定聲基陣坐標系與船體坐標系之間的關系,即需測定相對船體坐標系的位置偏差和聲基陣的安裝偏差角度(橫搖角、縱搖角和水平旋轉角)。系統通過測定聲單元的相位差來確定換能器的方位(垂直和水平角度)。換能器與目標的距離通過測定聲波傳播的時間,再用聲速剖面修正波束線來確定。
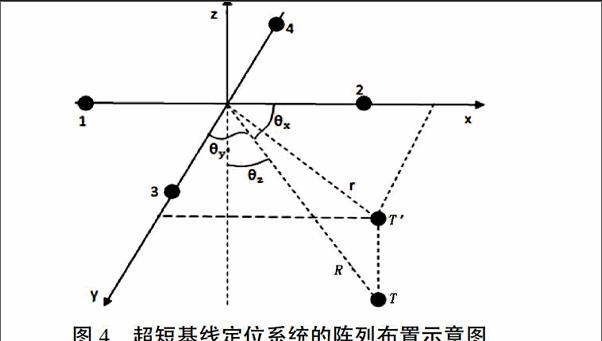
以4陣元組成的水聽器基陣的超短基線定位系統為例,其陣列布置如圖4所示。
圖4中,標號1,2,3,4代表基陣的4個陣元,x軸為1至2方向,y軸為4至3方向,兩軸相交于陣元中心,過陣元中心垂直向上為z軸方向。T為目標,與陣元中心的距離為R,陣元1,2間距和3,4間距相同,即陣元間距為d.T在坐標系中的方向角為θx,θy,θz,可通過陣元傳播時延確定。
待測目標物各角度的方向余弦為:
. (3)
. (4)
方向角測定的基本公式為:
. (5)
式(5)中:φx為陣元間的相位差,由陣列測定。
由定位公式可得:
y=Rcosθy. (6)
其中,θx,θy,θz滿足基本條件:cos2θx+cos2θy+cos2θz=1.
2 水下定位系統優缺點分析
通過分析三種水下定位系統的原理,結合各種定位系統的配套設備和安裝校準方法,得出這三種水下定位系統的優缺點和適用性。
表1 三種水下定位系統的優缺點
系統 優點 缺點
長基線
定位系統 無需做大量的校準工作,在較大范圍內可以達到較高的定位精度,作用距離較長,定位精度與水深無關 系統構成復雜、聲基線陣龐大,費用較高,大量的水下或海底設備造成其布放、回收、使用和維護具有一定的難度
短基線
定位系統 系統集成的價格大大低于長基線定位系統,操作比長基線定位系統簡單,較方便靈活。測量范圍包含基陣水下所有能接收到信號的區域,作業范圍比超短基線定位系統廣,淺水區域測量精度較高 基元安裝位置可能會受到船螺旋槳尾流的擾動影響,對船的要求較高,需要較大的船只。系統安裝時,需要在船底穩定固定各基元,并準確量測各基元間的相互位置關系,測量難度較大,一般需要將船開至船塢準確量測、校準
超短基線
定位系統 系統基陣尺寸小,安裝使用方便,價格相對較低,測距精度高。結合GPS與羅經設備配合使用,大大減弱了潮流、潮時等因素對水下調查設備位置測量精度的影響 使用前需要進行安裝校準,遠距離誤差發散快,超短基線作用距離不遠,遠距離定位精度不高,但考慮到瓊州海峽水深在100 m以內,水深較淺,USBL水下定位系統的精度較高
3 結束語
結合海南聯網海底電纜綜合檢測水下機器人定位的實際需要,通過分析三種水下定位系統的原理、優缺點和適用性得出,長基線定位系統定位精度最高,但價格昂貴,適合于大面積、深海區域的海洋調查定位;短基線定位系統由于基元距離較遠以及船的尾流對基元的擾動影響,對船的要求較高,并且需要在船塢安裝、校準;超短基線定位系統儀器設備體積小,易于安裝,價格便宜,定位精度較高,對船只沒有較高的要求,完全滿足海南聯網海底電纜檢測水下機器人定位的需要。因此,在500 kV海南聯網海底電纜綜合檢測項目中使用超短基線定位系統進行水下定位。
參考文獻
[1]陳凱華.海南聯網海纜敷設施工與防護[J].南方電網技術,2009(5).
[2]趙遠濤.海南聯網工程海底電纜風險分析[J].中國電業(技術版),2014(10).
[3]王星,尚濤,黃賢球.海南聯網海底電纜護套絕緣監測方法[J].南方電網技術,2009(01).
[4]田春和,秦建.基于長基線水聲定位系統水下定位技術初步應用研究[J].水道港口,2015(3).
[5]趙建虎,沈文周,吳永亭,等.現代海洋測繪[M].武漢:武漢大學出版社,2007.
[6]楊保國.超短基線系統安裝校準技術研究[D].哈爾濱:哈爾濱工程大學,2013.
〔編輯:劉曉芳〕