基于多島遺傳算法的大型疏浚抓斗機構優化設計
2016-05-28 08:45:13甄義省
港口裝卸 2016年2期
甄義省
中國鐵建港航局集團有限公司
陳凱凱
武漢理工大學物流工程學院
?
基于多島遺傳算法的大型疏浚抓斗機構優化設計
甄義省
中國鐵建港航局集團有限公司
陳凱凱
武漢理工大學物流工程學院
摘要:根據大型疏浚抓斗的作業特點,對設備結構進行簡化,獲得抓斗挖料力學模型。提出了用于描述抓斗挖掘性能的推重比,以此為優化目標,提取出影響抓斗推重比的7個關鍵參數,建立了抓斗機構的數學優化模型。基于多島遺傳算法在全局范圍內尋優,實現了對抓斗機構的優化。優化后抓斗性能得到明顯改善:推重比由原方案中的4.972降低為3.470,最大單缸推力減少了27.8%,挖料量增加了3.4%。
關鍵詞:疏浚抓斗; 推重比; 優化模型; 多島遺傳算法
1引言
疏浚抓斗主要用于河道湖泊、近海港口、水利工程等的疏浚清淤工作,根據動力源不同可分為重力式抓斗和液壓式抓斗。重力式抓斗以抓斗自重作為動力源,協同起升繩、開閉繩實現裝卸料;液壓式抓斗則由電機提供動力,通過液壓缸伸縮驅動斗瓣運動,主要用于挖掘阻力較大的場合。目前,日本的“東祥號”和“五祥號”疏浚船已經配備了200 m3級液壓抓斗[1],我國自主研發的疏浚抓斗中以重力式抓斗居多,且斗容普遍低于30 m3,50 m3級抓斗也正積極研制中[2]。近些年來,隨著海上疏浚和填筑工程日漸興起,疏浚市場對疏浚設備的效率、成本和節能減排等提出了更高的要求,大型化、高效率和低耗能已經成為疏浚抓斗發展的趨勢,研制超大型液壓抓斗正成為我國疏浚行業所面臨的一大挑戰。
本文研究的大型疏浚抓斗采用液壓油缸驅動,具有挖掘量大、結構尺寸大、受載復雜等特點。通過產品類比和已有經驗進行了初步方案設計,在此基礎上基于高效、節能的設計要求,對抓斗機構進行了深入的優化設計研究,取得了一定的研究成果。
2抓斗機構數學優化模型
2.1抓斗機構簡化模型
疏浚抓斗結構組成如圖1所示,斗瓣與橫梁在支撐鉸點鉸接。作業時,通過控制液壓油缸伸縮驅動斗瓣閉合、開啟,從而完成對物料的裝卸作業。斗瓣對稱布置在左右兩側,通過連桿確保兩斗瓣同步運動。根據抓斗結構組成將抓斗機構簡化成圖2所示。圖中,O點為斗瓣與支撐架的連接鉸點,D點為斗瓣與油缸的連接鉸點,AC表示斗瓣底板,AB為斗瓣側刃。
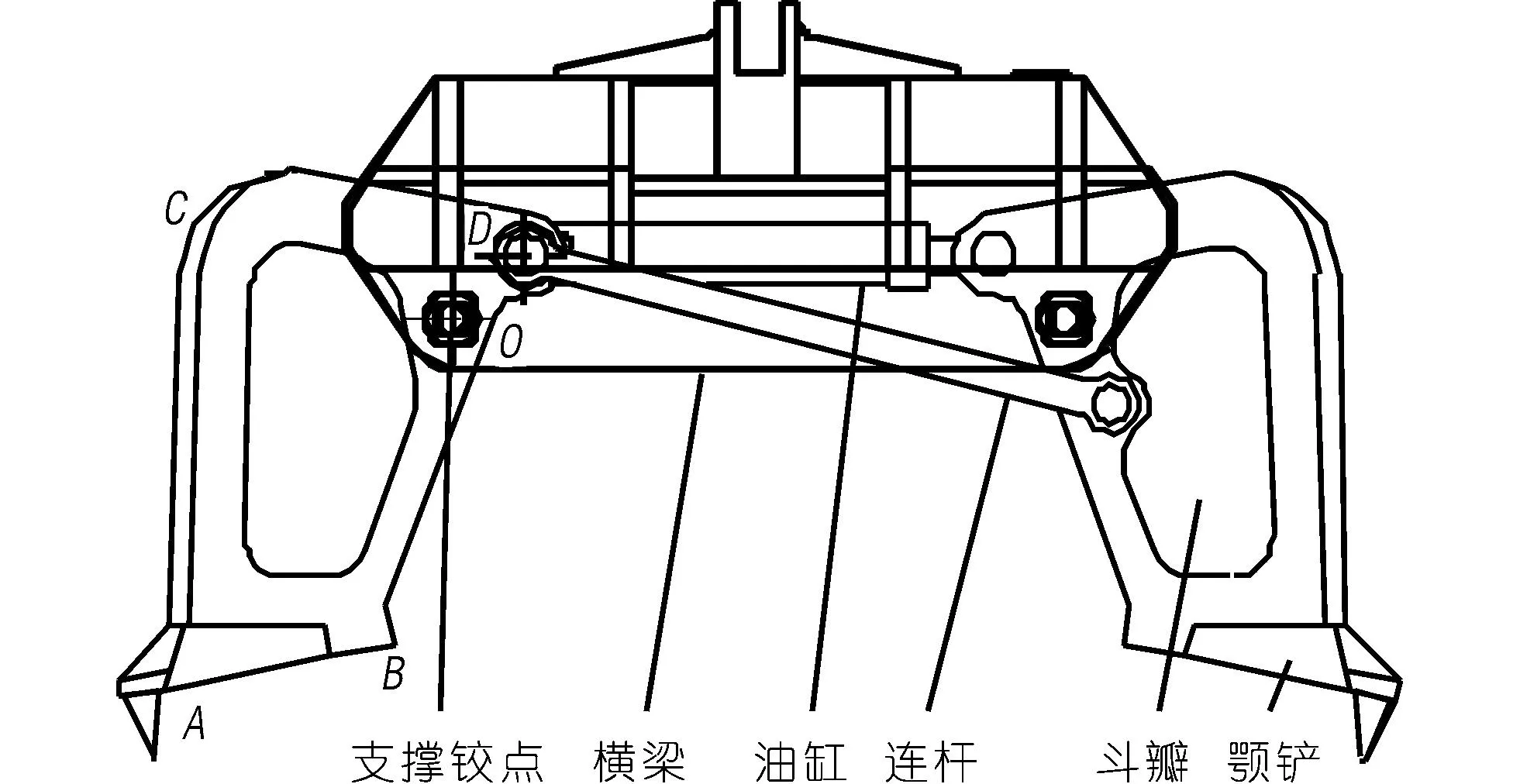
圖1 疏浚抓斗結構組成

圖2 抓斗機構簡化示意圖
2.2優化模型
2.2.1設計參數
設計參數是根據實際作業條件或實際需求,在抓斗設計設計時應滿足的基本參數,本文中包括2個設計參數:抓斗額定斗容[V]和斗瓣最大轉角η。
2.2.2設計變量
設計變量的選取需要進行綜合考量,如變量對目標函數的影響是否顯著,變量之間是否相互獨立等。本文選取了7個結構參數作為設計變量,即X=[x1,x2,x3,x4,x5,x6,x7]T,如圖2所示。這7個設計變量為斗瓣的主體結構參數,局部結構參數則需要結合結構強度、剛度等進一步確定。其中,x1為油缸鉸點半徑,x2為底刃鉸點半徑,x3為斗瓣結構張角,x4為斗瓣后角,x5為斗瓣前角,x6為斗瓣間距,x7為斗瓣寬度。
2.2.3優化目標
為獲得最大挖掘性能,應使抓斗挖料量盡可能大,而液壓油缸的最大推力盡可能小,使系統動力得到充分發揮。故將抓斗油缸最大推力Fmax與挖掘物料的重量Gb的比值作為目標函數,稱為液壓抓斗的推重比,并使其在約束條件下達到最小,即
其中,液壓油缸最大推力
(1)
αi為斗瓣位置參數,表示在斗瓣處于某一轉角狀態時,抓斗側刃與豎直平面之間的夾角,αi∈(0,η)。F(X,αi)為抓斗在αi位置時的液壓油缸的推力,是設計變量X和位置參數αi的函數。疏浚抓斗在挖掘作業過程中,斗瓣受到的力主要有液壓油缸對斗體的驅動力F,支撐架對斗體的支持力F支,斗體自身重力G,浮力F浮,水平刃口的切入阻力R1,顎鏟側板切割刃的切入阻力R2,土體的推壓阻力R3和抓斗側板受到的摩擦阻力R4,各力分量表達式參考自文獻[3]中對電液疏浚抓斗所做的一些研究,受力情況如圖3。各力在O點取矩,由力矩平衡可得到油缸推力表達式,式中li為各力對應的力臂。
(2)
圖4為抓斗挖料示意圖,陰影部分為被挖掘物料。抓斗閉合時挖掘物料的重量為Gb(X)=γV(X),γ為物料容重,則被挖掘物料體積為
(3)
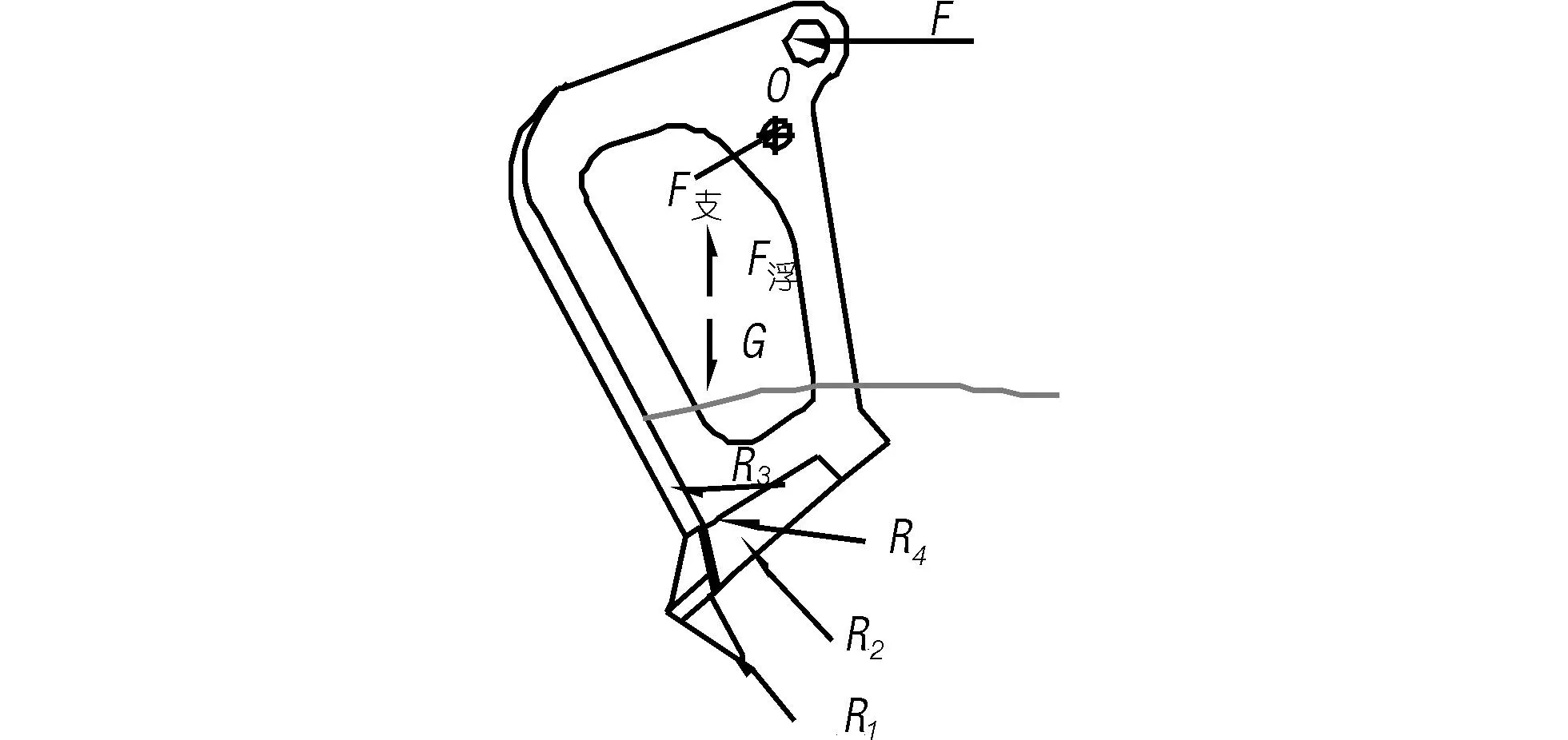
圖3 抓斗挖料受力模型

圖4 抓斗挖料量計算模型
2.2.4邊界條件和約束條件
結構尺寸邊界
側刃與底刃夾角限制
結構關鍵尺寸比值限制
保證液壓油缸有足夠的動作空間
單缸最大推力限制
抓斗挖掘物料體積應不低于設計值,即

3優化算法
該優化模型具有6個設計變量、1個非線性目標函數和10個不等式約束條件,屬于單目標非線性優化問題。在目標函數中,因為油缸最大推力由式子Fmax=max[F(X,αi)]獲得,即Fmax取諸多離散狀態下F(X,αi)的最大值。這可能導致目標函數表現出非線性、非連續和不可微的特點,因而難以采用傳統的基于函數梯度或導數的搜索算法,運用多島遺傳算法(MIGA,Multi-Island Genetic Algorithms)可以解決此類優化問題[4]。
MIGA是一種基于隨機搜索技術的進化計算方法,可以對設計空間進行全局探索,從而避免了集中在局部區域的搜索,具有比傳統遺傳算法(GA,Genetic Algorithms)更優良的全局求解能力和計算效率[4]。MIGA將一個大的種群分成若干個子種群,稱之為“島”。在每個島上仍然采用傳統GA算法進行子種群的演化。子種群每演化一定代數,會按一定的比例遷移到其它島上,完成不同子種群間個體的交換,然后繼續按GA算法演化[5]。圖5顯示了MIGA的計算流程。

圖5 MIGA算法流程
4優化計算及結果
本優化計算以136 m3抓斗的初步方案為研究對象。MIGA 算法中相關參數設置如下:子群規模選擇30,島的個數選擇10,總進化代數選擇 20,交叉概率取 0.9,變異概率取0.05,島間遷移率取0.2,遷移間隔代數選擇5,保留到下一代的精英個體量選擇3,總迭代次數為6 000次。圖6顯示了目標函數隨迭代次數的變化曲線。從圖中可以看出,在MIGA 算法尋優過程中,出現了少量的大幅度“跳動”現象,但迭代結果大多在3.5附近波動,表明算法仍保持了一定的穩定性。
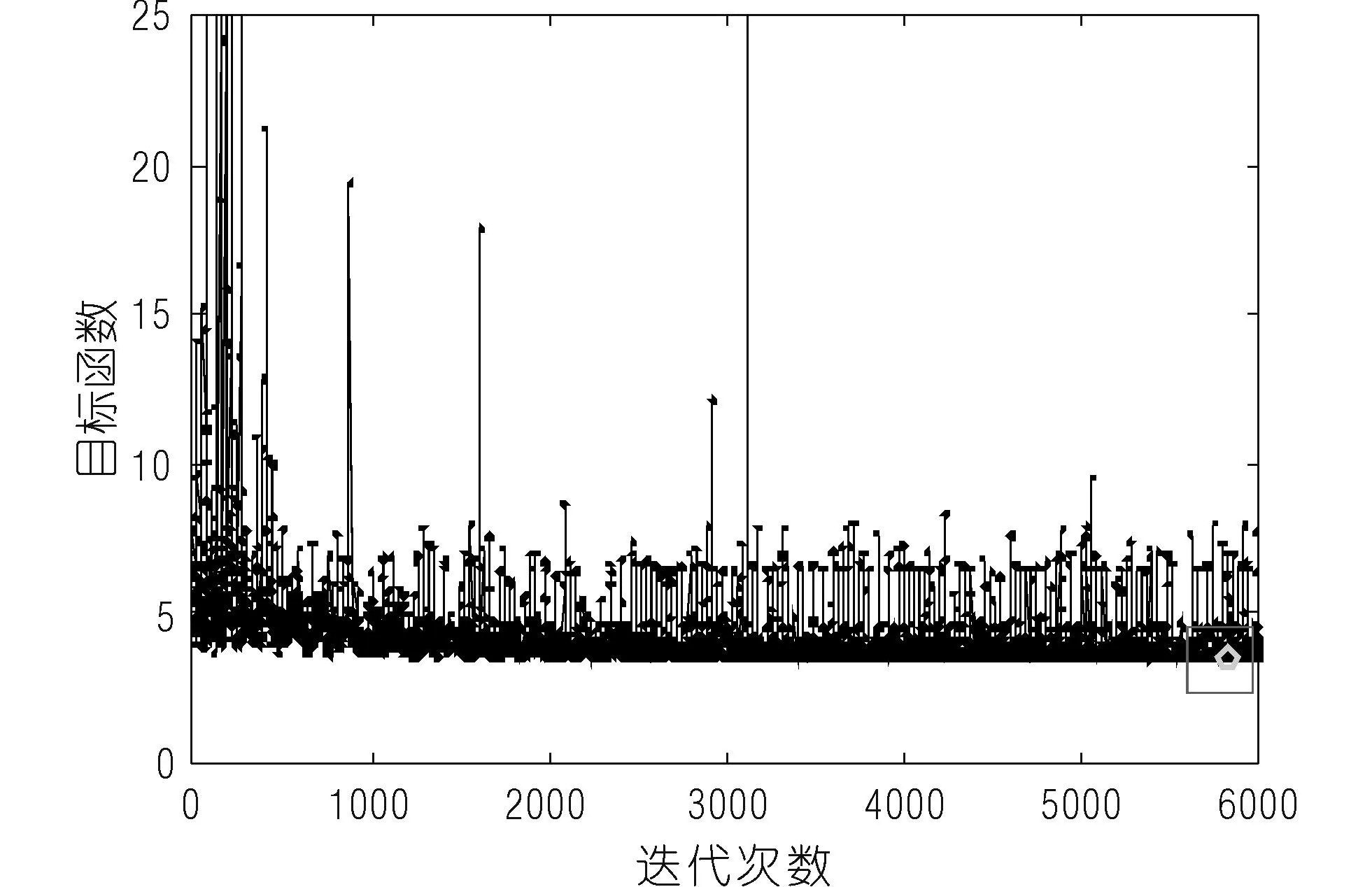
圖6 優化目標迭代結果
優化前后抓斗機構設計方案如表1所示。從表中可以看出,在機構優化后,抓斗的推重比由4.972下降為3.470,優化效果顯著。其中,單缸最大推力由5 533.3 kN下降為3 993.1 kN,降低了27.8%;而抓斗的挖料量由139.1 m3上升為143.8m3,增加了3.4%。在優化方案中,設計變量x1、x5和x7均已接近上限值。這表明抓斗機構設計中,在保證機構不產生干涉的前提下,對油缸鉸點半徑、斗瓣前角和斗瓣寬度3個結構參數應盡量取最大值,這有利于抓斗挖掘性能的提升。
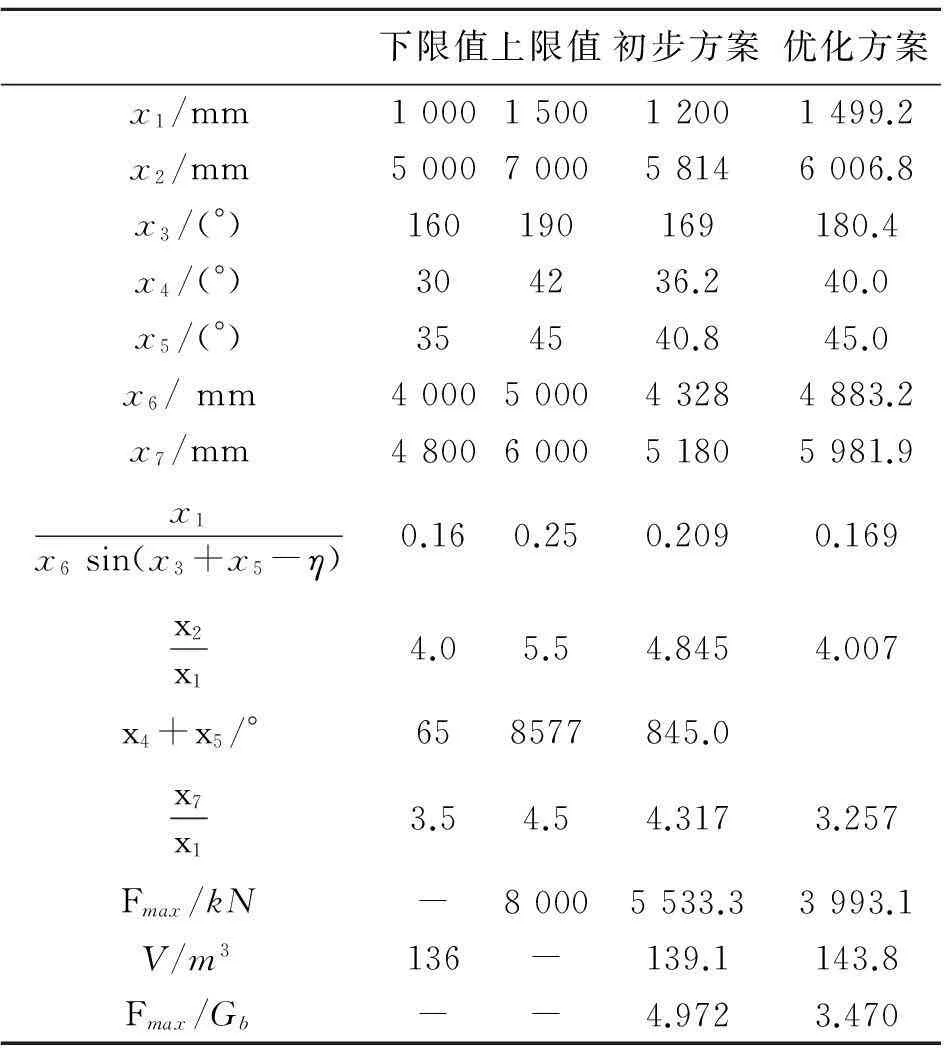
表1 不同插入深度下得到的優化方案
5結語
大型疏浚抓斗具有挖料量大、適應能力強的特點,是海上疏浚和填筑工程中的關鍵設備。本文對抓斗機構進行數學建模,提出了用于描述抓斗挖掘性能的推重比概念。通過多島遺傳算法(MIGA)對設計空間進行全局探索,將推重比由原方案中的4.972降低為3.470,使抓斗挖掘性能得到進一步的提升。
參 考 文 獻
[1]田金柱,蔡峰,張巍華,王智偉. 挖泥船用200 m3大型抓斗機電氣系統設計基于多島遺傳算法的大型疏浚抓斗機構優化設計[J].船舶工程,2015,S1:163-166.
[2]潘品鋒,張玉蓮. 50 m3級大型疏浚抓斗參數設計及CAE靜力分析[J]. 造船技術, 2015(2): 78-84.
[3]許炎林,胡吉全. 電液疏浚抓斗挖掘過程受力分析[J]. 武漢理工大學學報(交通科學與工程版), 2015,05:1079-1082+1086.
[4]劉克龍,姚衛星,余慶雄. 幾種新型多學科設計優化算法及比較[J].計算機集成制造系統,2007,13(2):209-216.
[5]周威,陸金桂. 多島遺傳算法在螺旋槳優化設計中的應用[J]. 船舶工程, 2014,05:46-48+68.
Mechanism Optimization of Large Dredging Grab Based on Multi-Island Genetic Algorithms
CRCC Harbour & Channel Engineering Bureau Group Co.Ltd,Zhen Yisheng
School of Logistics Engineering Wuhan University of TechnologyChen Kaikai
Abstract:According to the operating characteristics of large-scale dredging grab, a structural predigestion of the device was performed, and a mechanical model of the grab was obtained. A new conception, named thrust-weight ratio, was proposed to describe the performance of grab. Based on the optimization target of minimizing the thrust-weight ratio, 7 critical parameters were extracted, and a mathematical model of the grab mechanism was established. Using the multi-island genetic algorithms (MIGA) to find the best solution in the global scope. And the solution optimized brings a great improvement to the grab performance: the thrust-weight ratio decreased to 3.470 from 4.972, and the largest thrust of a single hydraulic cylinder declined 27.8%, however, digging capacity grew 3.4%.
Key words:dredging grab, thrust-weight ratio, optimization model, MIGA
DOI:10.3963/j.issn.1000-8969.2016.02.002
收稿日期:2016-03-22
甄義省: 519000, 廣東省珠海市香州區翠峰街189號