混合動力汽車協(xié)調控制策略構架
2016-06-02 03:09:46長春工程學院電氣與信息學院耿英楠趙迎輝蔣夢瑩郭慕瑤
電子世界 2016年9期
長春工程學院電氣與信息學院 張 允 耿英楠 杜 波 趙迎輝 蔣夢瑩 郭慕瑤
?
混合動力汽車協(xié)調控制策略構架
長春工程學院電氣與信息學院 張 允 耿英楠 杜 波 趙迎輝 蔣夢瑩 郭慕瑤
【摘要】為了實現混合動力汽車節(jié)能減排的目標,本文設計了混合動力汽車協(xié)調控制策略總體構架,詳細闡述了控制信號輸入和輸出模塊,工作模式判別模塊,轉矩計算模塊,轉矩管理與工作模式協(xié)調控制模塊等各主要模塊的功能。通過典型工況循環(huán)測試,驗證了該協(xié)調控制策略的有效性。
【關鍵詞】混合動力汽車;工作模式;協(xié)調控制
1 混合動力汽車協(xié)調控制策略總體構架
混合動力汽車協(xié)調控制策略總體構架模型如圖1所示,主要包括輸入模塊、總需求轉矩計算模塊、總目標分配轉矩計算模塊、工作模式判別模塊,轉矩管理與工作模式協(xié)調控制模塊及輸出模塊六大部分。
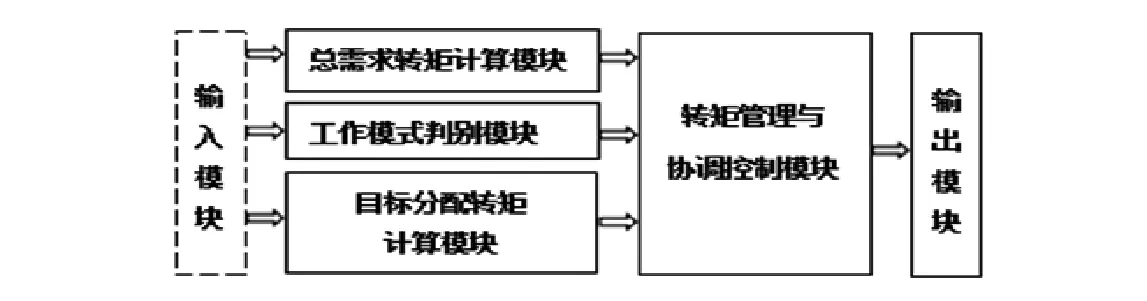
圖1 混合動力汽車協(xié)調控制策略總體構架
2 各主要模塊功能
2.1 輸入/輸出模塊
該模塊為控制策略的輸入信號和輸出信號部分,在實車中輸入信號由傳感器或執(zhí)行部件ECU通過CAN總線提供給整車控制器(HCU),輸出信號經HCU中的控制策略計算得到,由CAN總線傳遞到各執(zhí)行部件控制器。各輸出量主要包括:發(fā)動機、電機輸出轉矩命令;驅動模式命令;發(fā)動機、電機開關命令等。
2.2 需求轉矩計算模塊
要合理分配發(fā)動機和電動機的目標轉矩,并對混合動力系統(tǒng)進行能量管理及工作模式的協(xié)調控制,首先均應對需求轉矩進行識別。
總轉矩需求由驅動轉矩需求Td_req、制動轉矩需求Tb_req和電池充電轉矩需求Tch_req三部分構成。

2.3 工作模式識別模塊
該模塊主要根據駕駛員加速踏板開度、制動踏板開度、檔位、車速等判斷車輛工作模式,計算發(fā)動機、電機、離合器等執(zhí)行部件的狀態(tài)等。
2.4 分配轉矩計算模塊
(1)純電動模式
此時,發(fā)動機關閉,發(fā)動機目標轉矩為0,電動機單獨驅動車輛,其目標轉矩為需求轉矩。
(2)純發(fā)動機驅動模式
此時,發(fā)動機單獨驅動,發(fā)動機的目標轉矩等于需求轉矩。而電動機關閉,其目標轉矩為0。
(3)行車充電模式
此時,發(fā)動機驅動車輛并帶動電動機主動充電,發(fā)動機目標轉矩受發(fā)動機最大轉矩、驅動轉矩需求、電池最大允許充電轉矩和電動機最大充電轉矩的影響。而電動機的目標轉矩為發(fā)動機的轉矩與需求轉矩之差。
(4)混合驅動模式
此時,發(fā)動機輸出最大轉矩,需要功率輔助,由電動機提供剩余的需求轉矩。電動機的目標轉矩為需求轉矩與發(fā)動機轉矩之差。
(5)減速/制動能量回饋模式
此時,發(fā)動機關閉,發(fā)動機目標轉矩為0。當SOC小于峰值時,電動機處于發(fā)電狀態(tài),將動能轉化為電能存儲于電池中,此時系統(tǒng)為再生制動模式,電動機回收制動能量,電動機的目標轉矩為電機轉速與SOC的函數值。當SOC達到峰值時,電池不再有繼續(xù)接收電荷的能力,此時再生制動模式切換為機械制動模式,將車輛動能以其他形式的能量耗散。此時,機械制動轉矩為制動需求轉矩與電動機的轉矩之差。
2.5 轉矩管理與工作模式協(xié)調控制模塊
該模塊對發(fā)動機轉矩進行在線估計,對整車進行綜合協(xié)調控制。
3 工作模式綜合協(xié)調控制結果及分析
我們選取美國US06典型循環(huán)工況進行測試,并選取車速差均值作為整車動力性評價指標,選取百公里油耗作為整車經濟性評價指標,選取電池SOC變化均值作為電池SOC平衡性評價指標,相應性能指標的對比情況如表1所示。

表1 工作模式協(xié)調控制仿真結果
結果表明優(yōu)化控制后,整車動力性、經濟性、SOC平衡性均比優(yōu)化控制前有所提高,證明了本文建立的協(xié)調控制策略的有效性。
4 總結
本文基于模塊化設計思想,將控制策略分為控制信號輸入和輸出模塊,工作模式判別模塊,轉矩計算模塊,轉矩管理與工作模式協(xié)調控制模塊共計六個模塊。在此基礎上,針對典型循環(huán)工況進行測試,仿真結果表明本文提出的協(xié)調控制策略能夠有效地改善整車動力性、經濟性與排放特性。
參考文獻
[1]楊聞睿.混合動力整車控制單元技術的研究[D].上海﹕上海交通大學,2010.
[2]張建.混合動力公交車整車控制器的研究與開發(fā)[D].合肥﹕合肥工業(yè)大學,2012.
[3]秦健.一種基于PWM的電壓輸出DAC電路設計[J].北京﹕現代電子技術,2004(14).
[4]李至浩.混聯(lián)式混合動力汽車整車控制器硬件系統(tǒng)設計[J].機械與電子,2011(9)﹕16-20.
[5]李鴻博.電動汽車蓄電池狀態(tài)監(jiān)測系統(tǒng)的設計[D].大連﹕大連理工大學,2011.
基金項目:吉林省教育廳基金項目《混合動力客車多目標綜合協(xié)調控制技術研究》。