電子羅盤(pán)在傾斜狀態(tài)下校準(zhǔn)算法研究
2016-06-02 03:09:49中國(guó)船舶重工集團(tuán)公司第七一研究所龔天平
電子世界 2016年9期
中國(guó)船舶重工集團(tuán)公司第七一○研究所 龔天平
?
電子羅盤(pán)在傾斜狀態(tài)下校準(zhǔn)算法研究
中國(guó)船舶重工集團(tuán)公司第七一○研究所 龔天平
【摘要】針對(duì)電子羅盤(pán)在磁航向測(cè)量中存在的各種誤差,分析了電子羅盤(pán)(EMC)系統(tǒng)誤差的形成原因與機(jī)理,在此基礎(chǔ)上系統(tǒng)地研究了在任意姿態(tài)下電子羅盤(pán)磁航向誤差校正問(wèn)題,并且具體給出了2種誤差系數(shù)的求解方法以及相應(yīng)的誤差補(bǔ)償方法。多位置轉(zhuǎn)臺(tái)實(shí)驗(yàn)驗(yàn)證了該方法的有效性和實(shí)用性,校準(zhǔn)后的電子羅盤(pán)精度由3.2°提高到0.4°,滿足了導(dǎo)航系統(tǒng)的需求。
【關(guān)鍵詞】電子羅盤(pán);航向誤差;誤差補(bǔ)償;校準(zhǔn)
0 引言
電子羅盤(pán)用于測(cè)量載體姿態(tài),廣泛應(yīng)用于航空、航天、航海、水中兵器、石油鉆井、汽車(chē)等需要定向和導(dǎo)航的領(lǐng)域。由于使用場(chǎng)合往往存在軟硬磁環(huán)境干擾導(dǎo)致電子羅盤(pán)精度降低,所以需要對(duì)電子羅盤(pán)進(jìn)行修正校準(zhǔn)。在實(shí)驗(yàn)室內(nèi)經(jīng)過(guò)試驗(yàn)研究發(fā)現(xiàn),軟硬磁環(huán)境干擾引起的電子羅盤(pán)誤差主要表現(xiàn)為兩方面:一種是對(duì)傳感器零位的影響;另一種是對(duì)其靈敏度的影響。
目前,電子羅盤(pán)有平面校準(zhǔn)(橢圓擬合)和空間校準(zhǔn)(橢球擬合)兩種算法。平面校準(zhǔn)法主要用于不便于空間翻轉(zhuǎn)的大型載體,例如飛機(jī)、輪船、汽車(chē)等等。采用把裝有電子羅盤(pán)的載體在水平面內(nèi)旋轉(zhuǎn)一周連續(xù)采樣或用8點(diǎn)法每隔45°采樣的方法找出三軸磁通量的圓心與半徑。空間校準(zhǔn)法主要用于可以方便進(jìn)行翻轉(zhuǎn)的小型載體,例如手機(jī)、平板電腦等等手持設(shè)備。采用把裝有電子羅盤(pán)的載體在空間旋轉(zhuǎn)連續(xù)采樣或用12點(diǎn)法或24點(diǎn)法采樣的方法找出三軸磁通量的球心與半徑。
1 電子羅盤(pán)校準(zhǔn)算法簡(jiǎn)介
本文主要介紹平面校準(zhǔn)算法。在沒(méi)有誤差的情況下,X、Y軸的輸出對(duì)應(yīng)關(guān)系可用圖1表示,在坐標(biāo)系上映射出一個(gè)圓。

圖1 無(wú)誤差時(shí)傳感器輸出關(guān)系

圖2 有零位誤差時(shí)傳感器輸出關(guān)系
(1)零位補(bǔ)償
當(dāng)X軸和Y軸有零位誤差時(shí)如圖2所示。
那么X,Y的零位為:

修正值為:
(2)靈敏度補(bǔ)償
當(dāng)X軸和Y軸的輸出靈敏度不一致時(shí),這個(gè)圓變?yōu)橐粋€(gè)橢圓,如圖3所示。
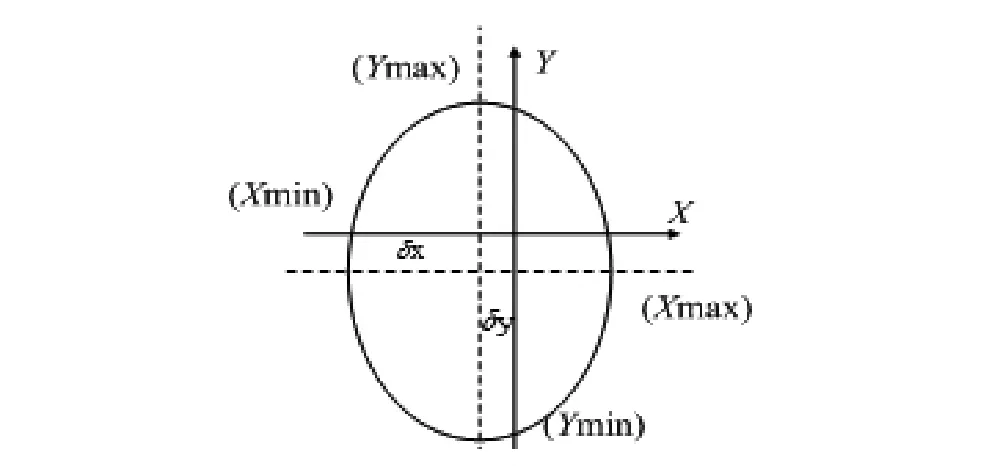
圖3 有靈敏度誤差時(shí)傳感器輸出關(guān)系

假設(shè)以X軸輸出為基準(zhǔn),那么為:

修正后:

在平面校準(zhǔn)法中,在采樣時(shí)必須保證載體在水平面內(nèi)旋轉(zhuǎn),但在用戶實(shí)際現(xiàn)場(chǎng)使用時(shí),由于轉(zhuǎn)臺(tái)、地面等平面不能保證絕對(duì)水平,往往有3°~5°甚至更大的傾斜角,且旋轉(zhuǎn)過(guò)程中,傾斜角不斷變化,這就會(huì)給計(jì)算帶來(lái)較大偏差,校準(zhǔn)后精度得不到保證,經(jīng)常發(fā)生越校準(zhǔn)電子羅盤(pán)精度反而越差的情況。
在某次用戶現(xiàn)場(chǎng)校準(zhǔn)數(shù)據(jù)見(jiàn)表1。
2 電子羅盤(pán)在傾斜狀態(tài)下校準(zhǔn)算法
電子羅盤(pán)在傾斜狀態(tài)下校準(zhǔn)算法如下:在校準(zhǔn)采樣磁通量過(guò)程中,通過(guò)電子羅盤(pán)自帶的傾斜角傳感器同步采樣傾斜角數(shù)據(jù)。采樣結(jié)束后,用傾斜角修正磁通量,將其轉(zhuǎn)換為水平面內(nèi)的磁通量,然后再用平面校準(zhǔn)法計(jì)算得出三軸磁通量的圓心與半徑。
如圖4所示,設(shè)地磁場(chǎng)為H,其在正交坐標(biāo)系的投影是Hx、Hy、Hz,磁傾角為θ,三軸磁通量的圓心為MX0,MY0,半徑為SX,SY,采樣的最大值和最小值分別是MXmax、MXmin、MYmax、MYmin、MZmax、MZmin。
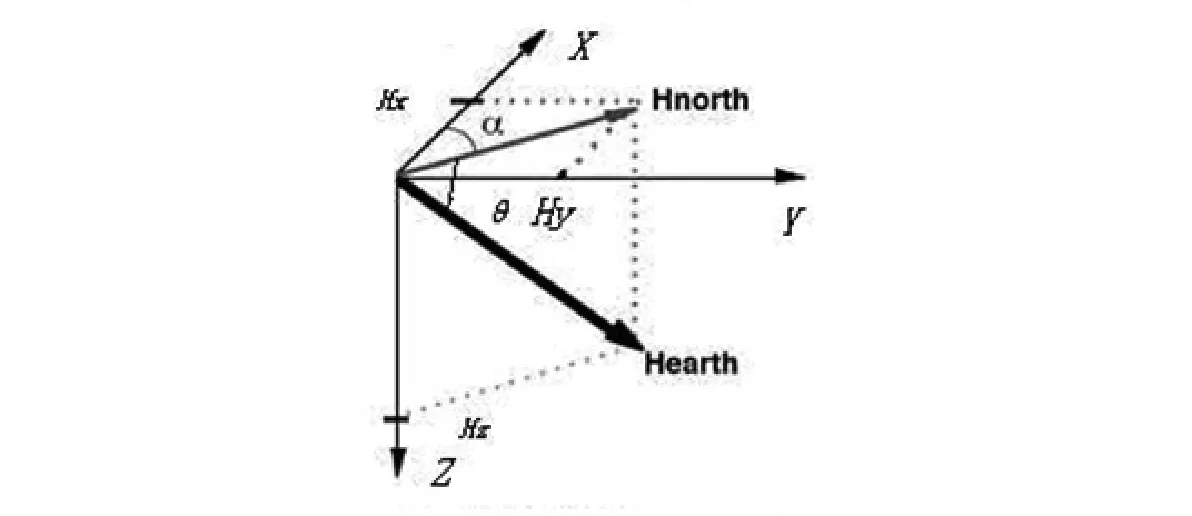
圖4 地磁場(chǎng)分量矢量圖
那么采樣的幾個(gè)極值點(diǎn)與地磁場(chǎng)存在下式關(guān)系:

在平面校準(zhǔn)法中,三軸磁通量的圓心與半徑由下式求得:
可見(jiàn),只要準(zhǔn)確找到幾個(gè)極值點(diǎn),就可以計(jì)算出三軸磁通量的圓心與半徑。而在實(shí)際使用過(guò)程中,由于各種原因?qū)е滦?zhǔn)過(guò)程采樣時(shí),載體不能保證在水平面內(nèi)運(yùn)動(dòng),這樣采樣到的極值點(diǎn)就與水平面內(nèi)的實(shí)際計(jì)算需求的極值點(diǎn)存在偏差。假設(shè)在采樣幾個(gè)極值點(diǎn)時(shí),載體與水平面存在的夾角分別是B0、B1、B2、B3,垂直面與鉛垂線的夾角是B4、B5。那么采樣的幾個(gè)極值點(diǎn)與地磁場(chǎng)存在下式關(guān)系:

把式(3)展開(kāi)得出:

把式(1)和式(3)聯(lián)合得出:

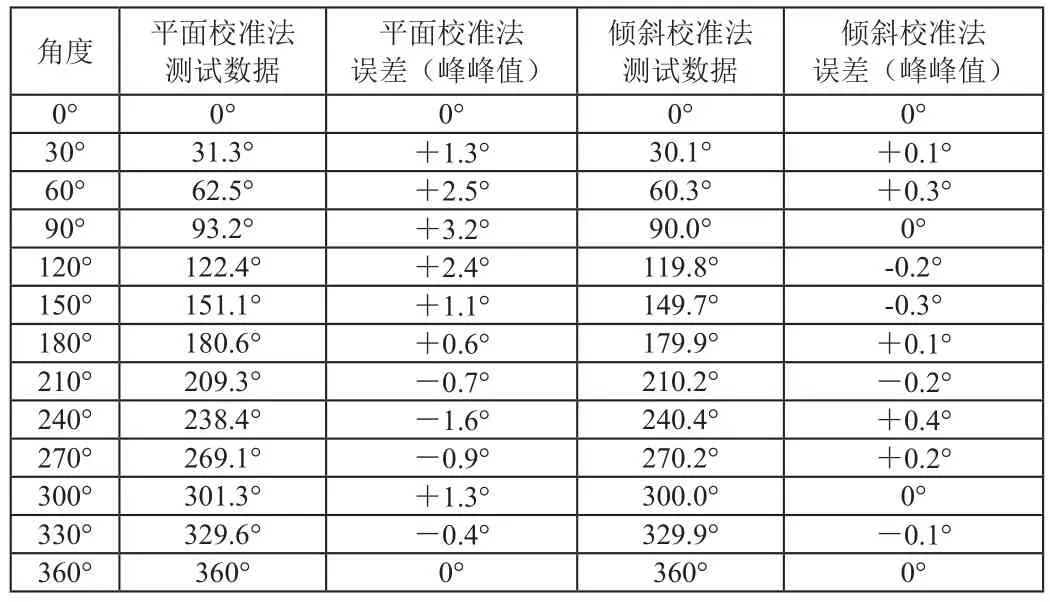
表1 電子羅盤(pán)在用戶現(xiàn)場(chǎng)校準(zhǔn)數(shù)據(jù)
由(5)式可以繼續(xù)推導(dǎo)得出:

其中,MXmax、MXmin、MYmax、MYmin、MZmax、MZmin由采樣得出,B0、B1、B2、B3可以由傾斜角傳感器測(cè)量計(jì)算得出。
用該算法改進(jìn)后的電子羅盤(pán)在某次用戶現(xiàn)場(chǎng)校準(zhǔn)數(shù)據(jù)見(jiàn)表1。
3 結(jié)束語(yǔ)
傳統(tǒng)的水平面校準(zhǔn)法對(duì)用戶要求較高,而實(shí)際使用過(guò)程中,很難找到專業(yè)實(shí)驗(yàn)室里才有的水平轉(zhuǎn)臺(tái),本文所述的電子羅盤(pán)傾斜在傾斜狀態(tài)下的校準(zhǔn)算法可以有效克服水平面校準(zhǔn)法的缺陷,使得電子羅盤(pán)在用戶實(shí)際使用過(guò)程中的校準(zhǔn)精度由3.2°提高到0.4°,具有很強(qiáng)工程應(yīng)用價(jià)值。
參考文獻(xiàn)
[1]李艷,管斌,王成賓.電子磁羅盤(pán)航向角誤差推導(dǎo)及分析[J].儀器儀表學(xué)報(bào),2013,34(7)﹕1566-1572.
[2]孫宏偉,房建成,李艷.橢圓擬合方法在磁羅盤(pán)羅差校準(zhǔn)中的應(yīng)用[J].光學(xué)精密工程,2009,17(12)﹕ 3034-3039.
[3]李智,李翔.基于橢球假設(shè)的三軸電子羅盤(pán)羅差補(bǔ)償研[J].儀器儀表學(xué)報(bào),2011,32(10)﹕2210-2215.
[4]秦勇,趙杰,王曉宇.基于橢圓擬合誤差補(bǔ)償算法的數(shù)字磁羅盤(pán)[J].吉掉大學(xué)學(xué)報(bào),2009,39(2)﹕490-493.
[5]KIM J,LEE J G,SUNG T K,et aI.Compensationgyroscope elTOrs and GPS /DR integration[C]//IEEEPLANS,96.Piscataway﹕IEEE Press,1996﹕464-470.