基于智能車模糊PI控制的研究
2016-06-02 03:09:55中北大學計算機與控制工程學院賈心言中北大學信息與通信工程學院高尚偉太原理工大學電氣與動力工程學院陳鵬義
電子世界 2016年9期
關鍵詞:仿真
中北大學計算機與控制工程學院 賈心言中北大學信息與通信工程學院 曹 珹 高尚偉太原理工大學電氣與動力工程學院 陳鵬義
?
基于智能車模糊PI控制的研究
中北大學計算機與控制工程學院 賈心言中北大學信息與通信工程學院 曹 珹 高尚偉
太原理工大學電氣與動力工程學院 陳鵬義
【摘要】智能車已經成為自動控制領域內的一個研究熱點,其控制系統的控制方法也越來越先進,典型的有傳統PI控制和模糊PI控制,為了驗證模糊PI控制方法的先進性,通過使用MATLAB軟件和Simulink平臺對其模型、加速性能和抗干擾性能進行仿真,實驗結果表明,采用模糊PI控制,響應快速的同時超調量很小,改變了傳統PI控制中響應時間和超調量總是相互矛盾的特征,并且消除誤差的時間很短。
【關鍵詞】MATLAB;Simulink;仿真;模糊PI控制
0 引言
在智能小車路徑跟蹤控制中目前采用的控制方法主要有常規 PI控制、模糊控制器等[1]。
模糊 PI控制把模糊控制和 PI 控制結合起來,利用模糊控制對PI 參數進行在線調整,提高了系統的動態性能[2]。改變了傳統PI控制中響應時間和超調量總是相互矛盾的特征,并且消除誤差的時間短,控制方法更為先進。
1 模糊PI控制系統仿真
模糊PI控制系統的仿真模型如圖1所示:
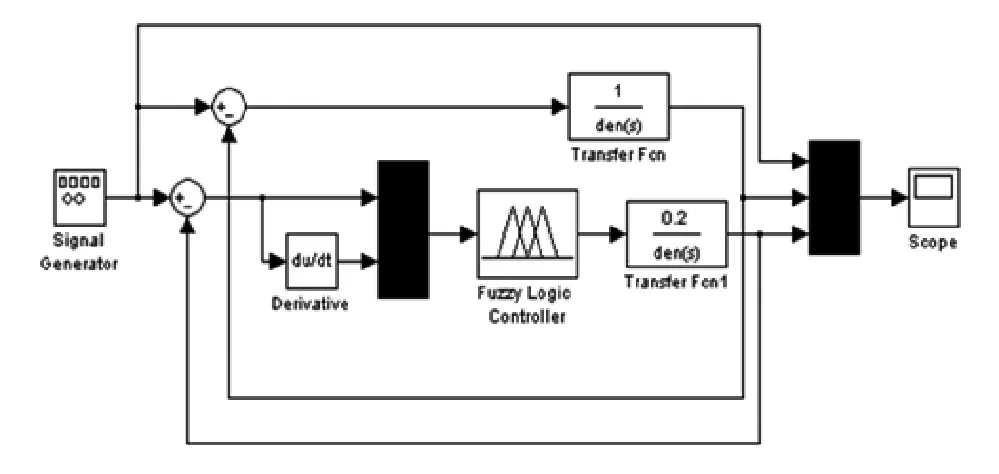
圖1 模糊PI控制系統仿真圖
在仿真之前,我們需要對仿真參數進行適當的修改,打開菜單“simulation”,選擇下面的“configuration parameters”選項,將“zero crossing control”里面改為“disable all”,至于仿真步長,我們可以在“Max step size”中修改,如果沒有很高的要求,我們可以選擇“auto”,即系統自動設置步長[3]。通過這些設置我們便可以對系統進行仿真,以下是仿真結果:

圖2 模糊PI控制系統的響應曲線
從圖2中,我們可以得知模糊PI控制系統的動態性能如表1所示:

表1 模糊PI控制系統的動態性能指標 單位:(ms)
作為更高級別的控制系統,模糊PI控制的智能車系統,應該具有更好的跟隨性能和抗干擾能力,首先必須滿足這兩項基本指標,才有可能再開發出更好更加優越的特性[4]。這兩項指標也是反應其基本穩定性能的重要依據之一,所以,我們必須要對這兩項性能進行測試,利用之前的測試方法,測試如下:
(1)加速性能:車的行駛歸根結底就是速度的控制,當人或系統發出速度指令之后,系統能不能快速穩定的響應速度信號,達到控制要求,這密切關系著車行駛的高效性,以及能源的節約性。在這里,當系統響應穩定之后,在輸入信號處再加上一個幅值為1的階躍信號,模擬車的加速信號,仿真結果如下圖3所示:
從圖3中可以分析出,智能控制系統對加速信號的跟隨性能可以實現快速穩定精確等特點,其相應曲線甚至比起動性能還要好,這充分體現了智能控制擁有其它控制方式所不具備種種優勢。

圖3 模糊PI控制系統加速響應曲線
(2)抗干擾能力:現實中有太多的不確定性,這樣就導致有太多的干擾信號,對于這些不確定性的干擾信號,無法逐一將其考慮在控制規則之中,所以提出抗干擾能力就顯得尤其重要。下面就將脈沖信號作為一個干擾源,加在一個穩定之后系統之上,看其對干擾的響應和抑制能力,所加信號為幅值為1,寬度為0.8ms的脈沖信號。仿真結果如圖4所示:
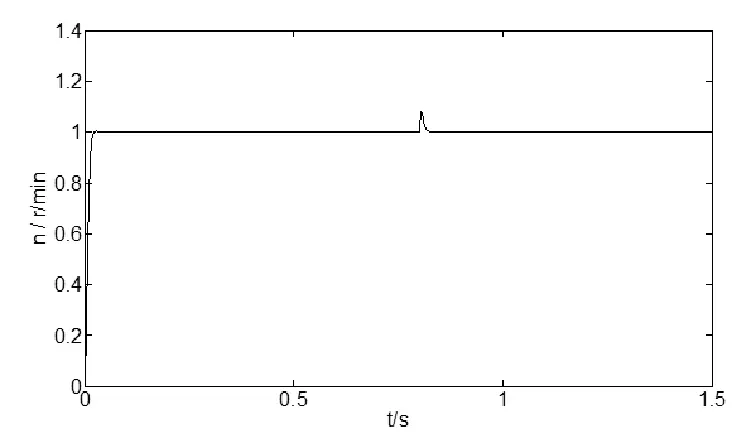
圖4 模糊PI控制系統抗干擾響應曲線
通過對圖4的分析,我們可以計算出,其波動量為0.08 ,波動百分比為8%,恢復時間為12ms,從恢復時間可以看出,系統能夠在短時間內消除干擾,恢復到穩態,從而保證系統的穩定性,進而增加智能車的安全系數。
2 結論
通過運用Simulink進行模糊PI控制的仿真,分析得出模糊PI控制的優點。模糊PI控制方法靈活、方便、可觀性強,并可在Simulink環境中非常直觀地構建各種復雜的模糊PI控制系統。模糊PI控制具有控制靈活、超調小、響應快和適應性能強的優點。對于智能小車,將模糊PI作為控制方法,將極大的滿足智能車系統的各項控制要求,從而將其作為智能車研究的重要內容,是必須的也是必然的。
參考文獻
[1]劉進,齊曉慧,李永科.基于視覺的智能車模糊PID控制算法[J].兵工自動化,2008,27(10)﹕67-69.
[2]董宗祥,石紅瑞,楊杰.嵌入式智能小車測控系統的設計與實現[J].計算機測量與控制,1671-4598(2010)02-0357-03.
[3]徐國華,譚名.移動機器人的發展現狀及其趨勢[J].機器人技術與應用,2001,(3)﹕7-14.
[4]李磊,葉濤,譚民等.移動機器人技術研究現狀與未來[J].機器人ROBOT,2002,24(5)﹕475-480.
猜你喜歡
中國教育技術裝備(2016年20期)2016-12-12 10:09:15
中小企業管理與科技·下旬刊(2016年10期)2016-11-18 20:57:34
科技資訊(2016年18期)2016-11-15 20:09:22
科技資訊(2016年18期)2016-11-15 07:55:28
價值工程(2016年29期)2016-11-14 02:01:16
電子技術與軟件工程(2016年18期)2016-11-14 00:46:54
數字技術與應用(2016年9期)2016-11-09 23:25:33
數字技術與應用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49