軌道壓板螺栓焊縫動(dòng)力學(xué)等效模擬研究
2016-06-14 02:30:48葛文豪魏國前
武漢科技大學(xué)學(xué)報(bào) 2016年3期
范 勤,葛文豪,魏國前
(武漢科技大學(xué)機(jī)械自動(dòng)化學(xué)院,湖北 武漢,430081)
?
軌道壓板螺栓焊縫動(dòng)力學(xué)等效模擬研究
范勤,葛文豪,魏國前
(武漢科技大學(xué)機(jī)械自動(dòng)化學(xué)院,湖北 武漢,430081)
摘要:針對(duì)起重機(jī)軌道壓板螺栓焊縫的開裂現(xiàn)象,提出一種等效模擬的動(dòng)力學(xué)仿真方法對(duì)其進(jìn)行分析。以某煉鋼廠鑄造起重機(jī)為對(duì)象,采用Adams和HyperMesh進(jìn)行聯(lián)合仿真,在Adams中借助拉壓彈簧阻尼器等效模擬螺母的擠壓以及焊縫的連接,以減少有限元分析的計(jì)算量;在HyperMesh中將橋架梁作柔性化處理,以提高整個(gè)仿真模型在豎直方向的振動(dòng)精度。將有限元仿真結(jié)果與實(shí)測(cè)值進(jìn)行比較,結(jié)果表明,焊縫處應(yīng)力值的仿真結(jié)果與實(shí)測(cè)值相一致。這驗(yàn)證了等效螺栓焊縫動(dòng)力學(xué)仿真方法的正確性和有效性。
關(guān)鍵詞:小車軌道;軌道壓板;螺栓焊縫;剛?cè)狁詈希坏刃M;彈簧阻尼器;動(dòng)力學(xué)仿真
起重機(jī)作為特種生產(chǎn)設(shè)備,它的設(shè)計(jì)、制造、安裝、維修、檢測(cè)都有對(duì)應(yīng)的標(biāo)準(zhǔn)與安全技術(shù)規(guī)范,但小車軌道作為橋式起重機(jī)的直接承重部件,其固定方案卻是參考鐵路軌道標(biāo)準(zhǔn)設(shè)計(jì)的,其中一套壓板式軌道固定方案,是利用螺栓焊接、螺母緊固的方式,用壓板將軌道固定在起重機(jī)橋架梁上[1]。這種固定方式具有安裝維護(hù)方便等優(yōu)點(diǎn),但在工作級(jí)別較高的鑄造橋式起重機(jī)小車軌道上應(yīng)用時(shí),由于承載小車移動(dòng)引起主梁彈性變形,使得壓板螺栓焊縫受到交變應(yīng)力作用,易出現(xiàn)斷裂現(xiàn)象。因此,起重機(jī)軌道固定裝置的研究備受重視。吳愛京[2]分析了起重機(jī)軌道的力學(xué)特點(diǎn)以及軌道壓板的安全性。魏國前等[3]研究了起重機(jī)軌道壓板的布置方式對(duì)壓板受力狀態(tài)的影響。饒剛等[4]研究了起重機(jī)增容對(duì)壓板螺栓焊縫受力的影響。以上研究都是從靜力學(xué)角度展開分析,得出的應(yīng)力結(jié)果用于解釋軌道壓板螺栓焊縫開裂的現(xiàn)象存在較大誤差;而如果從動(dòng)力學(xué)角度進(jìn)行分析,則面臨整機(jī)的壓板、螺栓、焊縫數(shù)量過多,造成動(dòng)力學(xué)方法在有限元分析中難以實(shí)現(xiàn)的困難。為此,本文將某煉鋼廠鑄造起重機(jī)小車軌道的螺栓用拉壓彈簧阻尼器來等效模擬,從而減少有限元模型的單元和節(jié)點(diǎn)數(shù)量,使其有限元模擬分析成為可能。
1動(dòng)力學(xué)仿真分析
1.1起重機(jī)基本參數(shù)
本臺(tái)鑄造起重機(jī)為四梁結(jié)構(gòu),跨度為25 m,主小車起重量為180 t,額定行走速度為36 m/min。軌道壓板螺栓的公稱直徑為24 mm,彈性模量為21 GPa,連接長(zhǎng)度為27 mm。軌道壓板螺栓焊縫的焊接材料為E4303,抗拉極限為420 MPa。
1.2等效螺栓焊縫動(dòng)力學(xué)模型的建立
韓鐵拴等[5]以軌道截面為研究對(duì)象,將螺母的擠壓與焊縫的連接用彈簧替換,提出簡(jiǎn)化方程:
(1)
式中:F為螺栓總拉力;Kf為螺栓等效連接剛度;ΔL為主梁彈性變形量。
Shigley等[6]通過數(shù)字分析和有限元分析來計(jì)算螺栓等效連接剛度,提出螺栓等效連接剛度公式:
(2)
式中:d為螺栓公稱直徑;E為連接材料的彈性模量;L為連接長(zhǎng)度。
為了提高豎直方向振動(dòng)的精度,本研究在Adams中選用多柔體系統(tǒng)動(dòng)力學(xué)模型進(jìn)行求解分析,運(yùn)動(dòng)學(xué)微分方程如下:
(3)
有限元單元的運(yùn)動(dòng)學(xué)求解迭代次數(shù)隨著柔性體質(zhì)量矩陣M數(shù)量的增加而增大。質(zhì)量矩陣M由每個(gè)質(zhì)量單元的平動(dòng)、旋轉(zhuǎn)以及模態(tài)自由度組成。整機(jī)的壓板、螺栓、焊縫質(zhì)量單元數(shù)量過多,導(dǎo)致質(zhì)量矩陣M數(shù)量過多,運(yùn)動(dòng)學(xué)求解迭代難以進(jìn)行。如果將軌道固定裝置中螺栓與焊縫的運(yùn)動(dòng)學(xué)模型用Adams中的拉壓彈簧阻尼器力學(xué)模型替代,減少整機(jī)運(yùn)動(dòng)學(xué)模型的求解迭代次數(shù),則軌道固定裝置的動(dòng)力學(xué)有限元分析成為可能。拉壓彈簧阻尼器力學(xué)模型公式如下:
(4)
式中:C為粘滯阻尼系數(shù);r為彈簧兩端的相對(duì)位移,r0為彈簧兩端的初始相對(duì)位移,本文中取r-r0=ΔL;K1為彈簧剛度系數(shù),本文中取K1=Kf;F0為彈簧的預(yù)緊力。
1.3等效螺栓焊縫動(dòng)力學(xué)仿真方法
將Creo中生成的3D模型分別導(dǎo)入Adams與HyperMesh中進(jìn)行聯(lián)合仿真[7],在HyperMesh中保留鑄造起重機(jī)的主要構(gòu)件橋架梁,刪除其余構(gòu)件,將橋架梁柔性化處理,其中螺栓與橋架梁焊接處的環(huán)形焊縫采用多點(diǎn)約束單元模擬,用于后續(xù)剛性體壓板與柔性體橋架梁的連接。將HyperMesh中生成的中性文件導(dǎo)入Adams中作剛?cè)崽鎿Q,在剛?cè)狁詈虾蟮膭傂怨?jié)點(diǎn)處添加拉壓彈簧阻尼器,將壓板壓在軌道與橋架梁上,添加合適的約束和驅(qū)動(dòng),進(jìn)行有限元?jiǎng)恿W(xué)仿真。
1.3.1三維模型的建立
本臺(tái)鑄造起重機(jī)的副主梁與端梁為對(duì)接連接,其自重載荷以及副小車自重載荷對(duì)主梁影響很小,為簡(jiǎn)化計(jì)算,在3D建模時(shí)將其省略。由于本次模擬的工況為滿載小車在跨中區(qū)域移動(dòng),故建模時(shí)軌道固定裝置只重點(diǎn)描述跨中區(qū)域8 m范圍內(nèi)的部分,其余部分以及大車車輪等均作簡(jiǎn)化處理。主小車以質(zhì)量、慣性矩相同的等效立方體替代。利用Creo軟件建立鑄造起重機(jī)的3D模型。
1.3.2創(chuàng)建柔性體
為提高仿真中整機(jī)系統(tǒng)豎直方向的振動(dòng)精度,保證軌道壓板螺栓焊縫動(dòng)力學(xué)特性與實(shí)際相吻合,須將鋼絲繩及橋架梁柔性化。由于鋼絲繩結(jié)構(gòu)簡(jiǎn)單,故在Adams中直接采用離散柔性構(gòu)件連接(Build/Flexible Bodies/Discrete Flexible Link),其原理是將一個(gè)構(gòu)件離散成若干段剛性構(gòu)件,這些剛性構(gòu)件之間彼此采用柔性梁連接起來[8];而橋架梁結(jié)構(gòu)復(fù)雜,因此將橋架梁導(dǎo)入HyperMesh中進(jìn)行柔性化處理,處理過程中,橋架梁在軌道壓板螺栓焊縫環(huán)形區(qū)域處須用多點(diǎn)約束單元進(jìn)行處理,剛性節(jié)點(diǎn)外置,并設(shè)為高剛度、小質(zhì)量的結(jié)構(gòu)點(diǎn)單元。焊縫的等效處理結(jié)果如圖1所示。
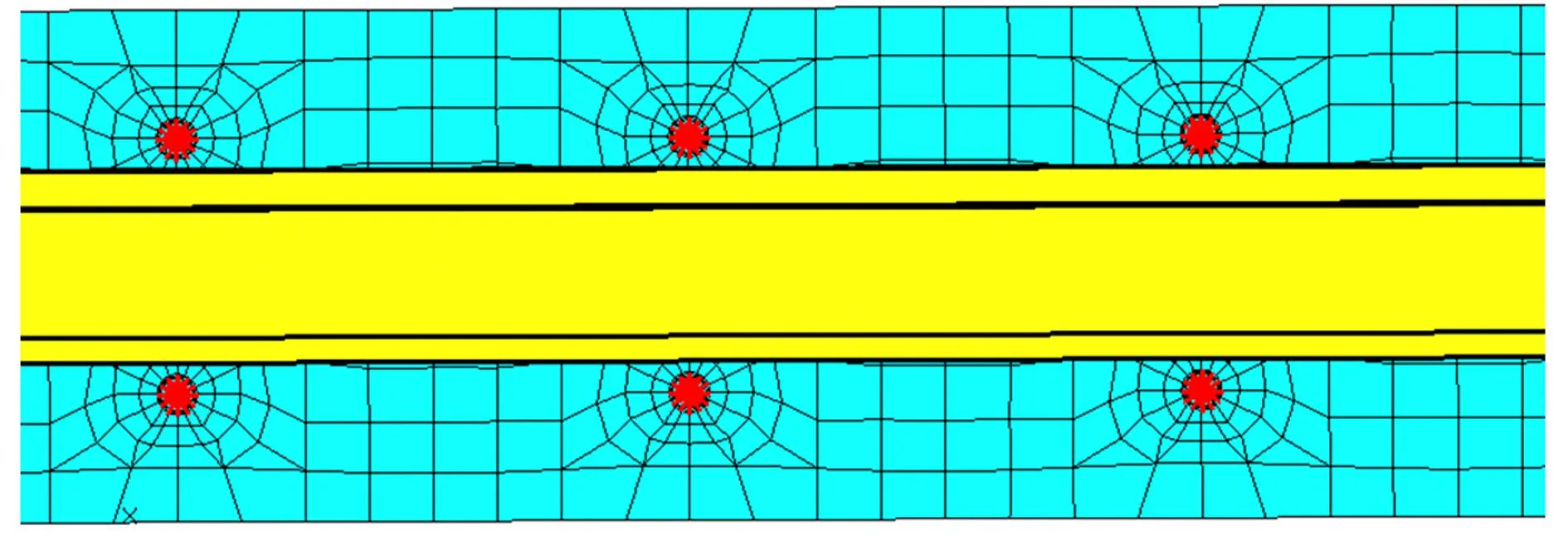
圖1 焊縫的等效處理結(jié)果
將采用HyperMesh柔性化處理后的橋架梁以中性文件形式導(dǎo)入Adams中進(jìn)行剛?cè)崽鎿Q,得到柔性化后起重機(jī)的整機(jī)模型如圖2所示。
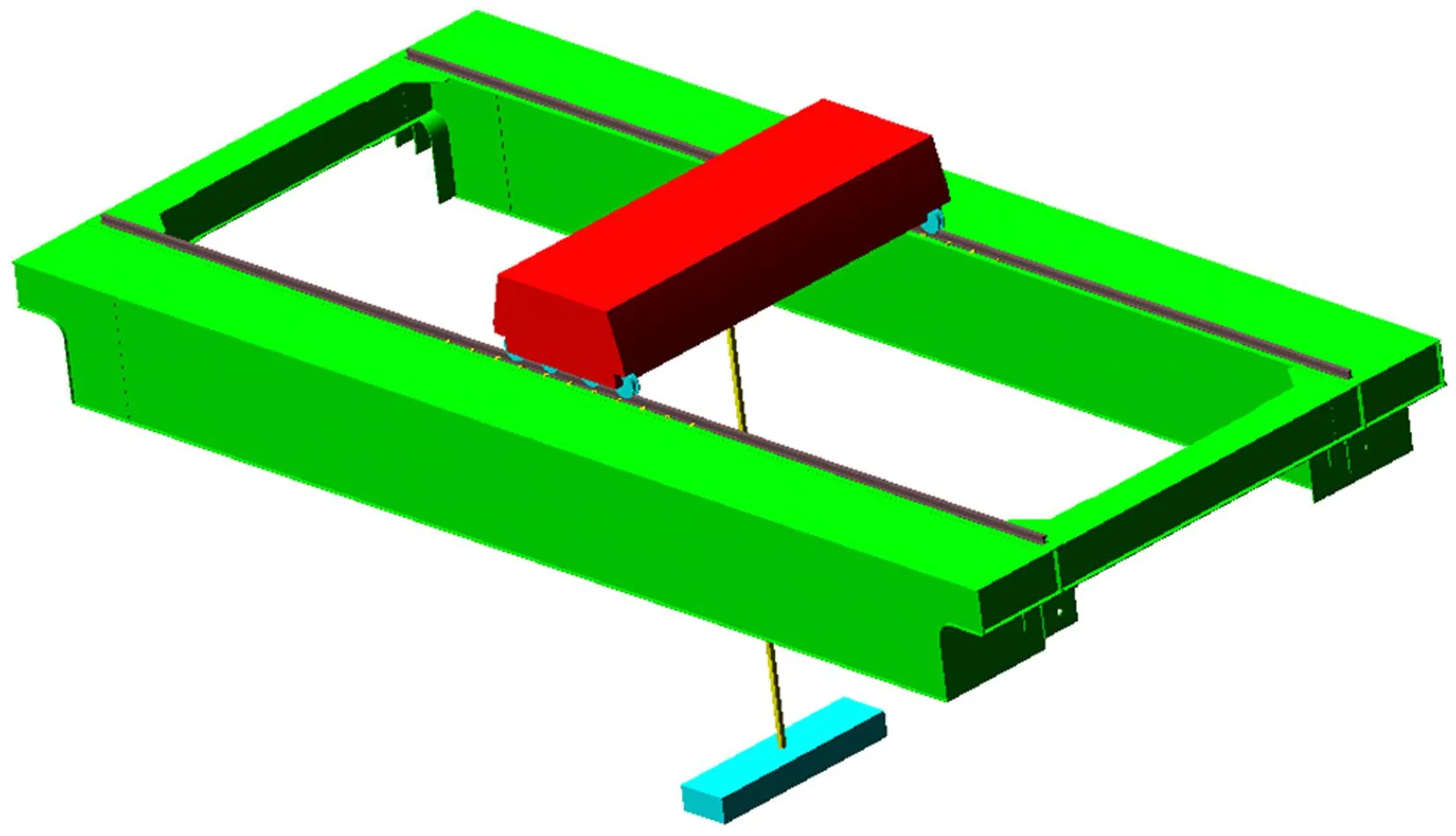
圖2 鑄造起重機(jī)整機(jī)模型
1.3.3邊界條件與驅(qū)動(dòng)的添加
車輪與小車用旋轉(zhuǎn)副約束;小車輪與軌道、軌道與橋架梁、壓板與軌道均用Contact約束;橋架梁與地面用固定副約束;壓板與橋架梁用拉壓彈簧阻尼器約束。由式(2)計(jì)算可得螺栓等效連接剛度為9.1 GN/m,故設(shè)置拉壓彈簧阻尼器的剛度為9.1 GN/m,阻尼為0,添加預(yù)作用力58 kN來模擬螺栓預(yù)緊力。
添加運(yùn)動(dòng)副后,在小車輪旋轉(zhuǎn)副處添加驅(qū)動(dòng)來模擬小車的行走工況:0~10 s,小車從跨中向西開4000 mm;10~30 s,小車反向向東開8000 mm;30~40 s,小車向西開4000 mm回到跨中。
1.4仿真結(jié)果與分析
由于軌道壓板螺栓焊縫數(shù)量多,為了方便后續(xù)研究,提取圖3所示典型位置(1#~4#螺栓)處的拉壓彈簧阻尼器應(yīng)力,用此代替螺栓焊縫應(yīng)力。提取得的等效焊縫應(yīng)力如圖4所示。由圖4中可以看出,小車來回運(yùn)動(dòng)一個(gè)周期,焊縫的最小應(yīng)力為120 MPa,最大應(yīng)力為220 MPa,應(yīng)力幅值為100 MPa。實(shí)際生產(chǎn)中,小車持續(xù)來回運(yùn)動(dòng),軌道壓板螺栓焊縫承受脈動(dòng)循環(huán)應(yīng)力。
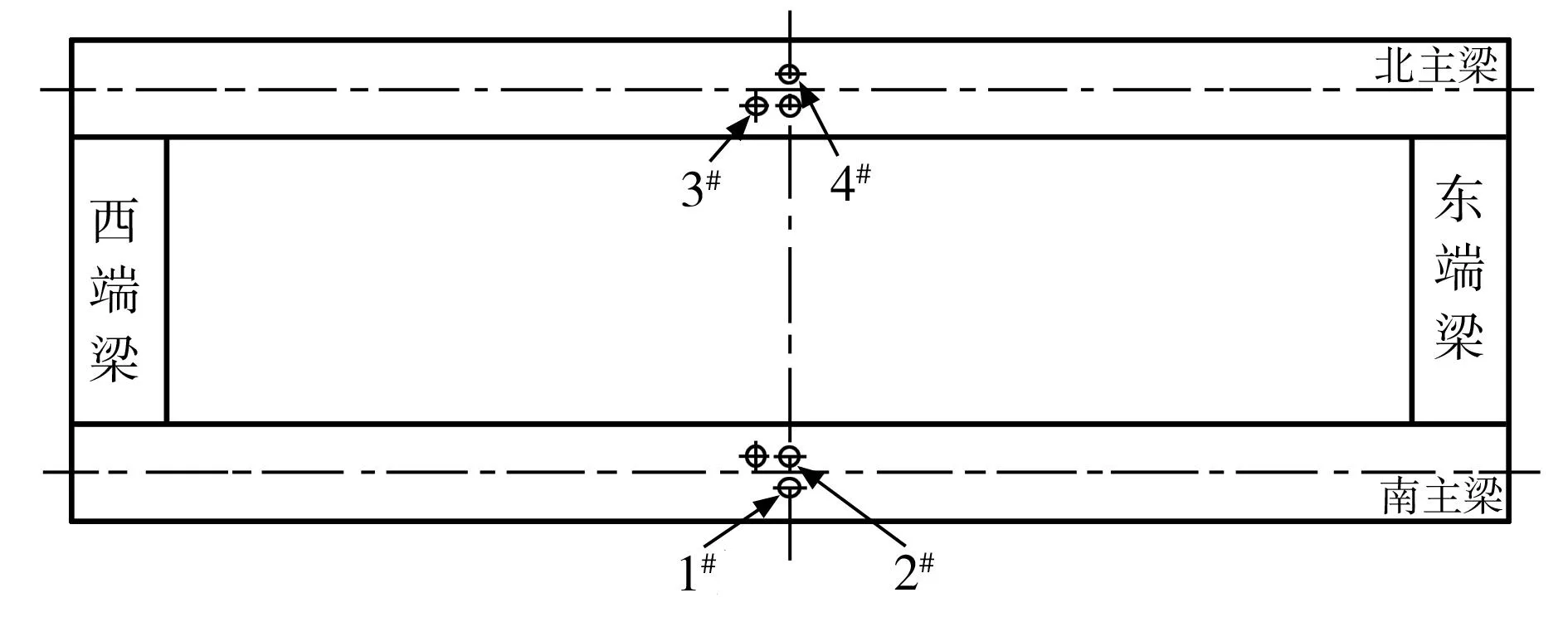
圖3 應(yīng)力提取的位置

圖4 螺栓等效焊縫應(yīng)力曲線
2實(shí)測(cè)驗(yàn)證
2.1測(cè)量方法
圖5所示為自制壓板螺栓壓力傳感器,使用前對(duì)其進(jìn)行標(biāo)定。實(shí)測(cè)中,在測(cè)點(diǎn)處采用壓板螺栓壓力傳感器替代彈簧墊圈,在傳感器外圓柱面上粘貼8片電阻應(yīng)變片,4片橫向,4片縱向,并連接成全橋形式。測(cè)點(diǎn)布置位置選在圖3所示的1#~4#螺栓處。
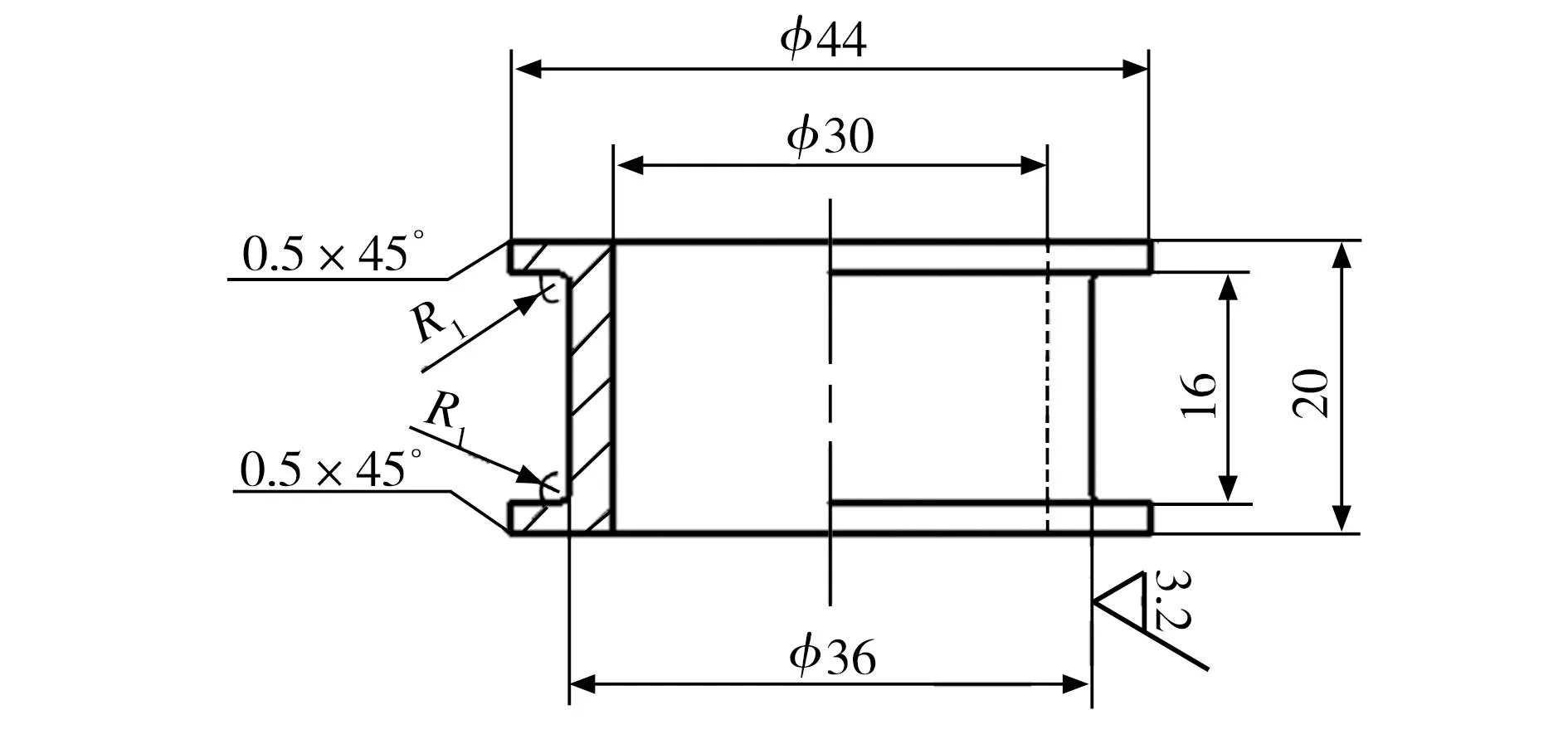
圖5 壓板螺栓壓力傳感器
2.2測(cè)試過程與結(jié)果分析
測(cè)試前,先將4個(gè)螺栓壓力傳感器分別裝入圖3中相應(yīng)螺栓處,測(cè)得連接螺栓預(yù)緊過程的受拉信號(hào)曲線如圖6所示。由圖6可以看出,由于人為操作原因,4個(gè)螺栓達(dá)到規(guī)定預(yù)緊力58 kN的時(shí)間各不相同,但最終受力誤差均在10%以內(nèi),屬于正常現(xiàn)象,可忽略不計(jì)。
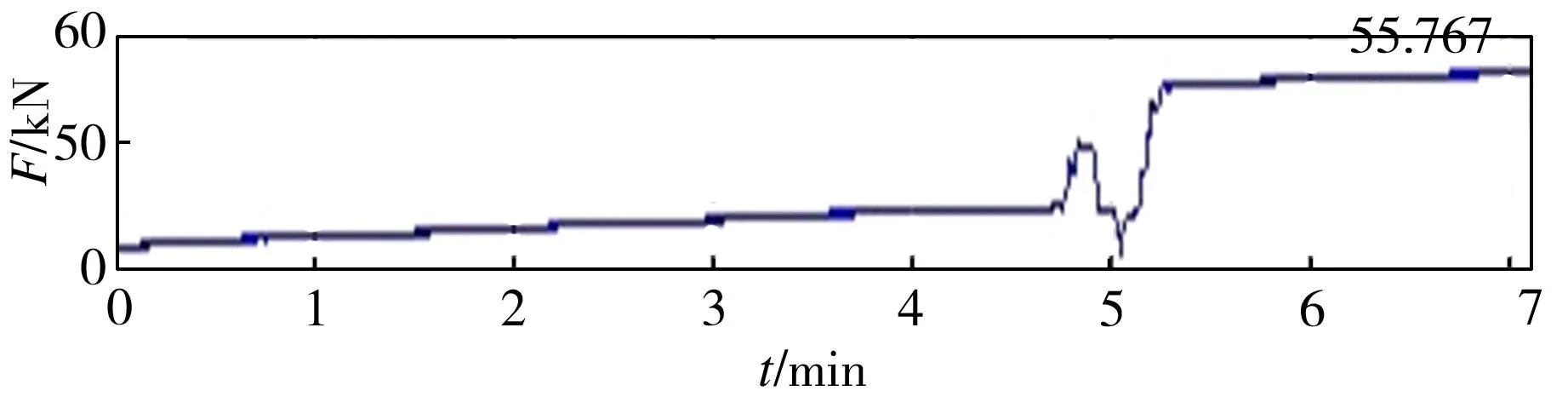
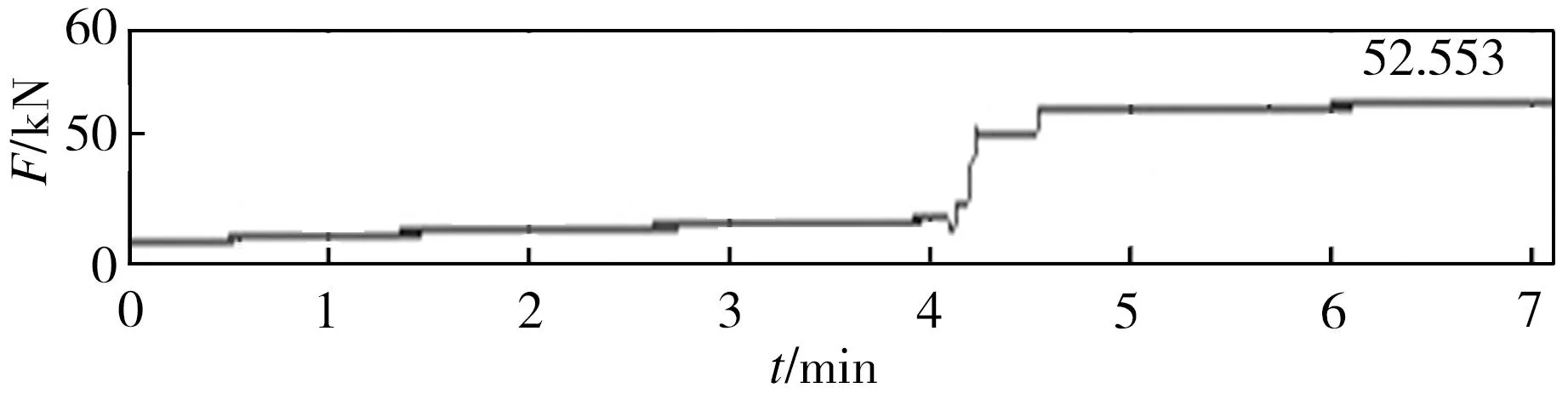
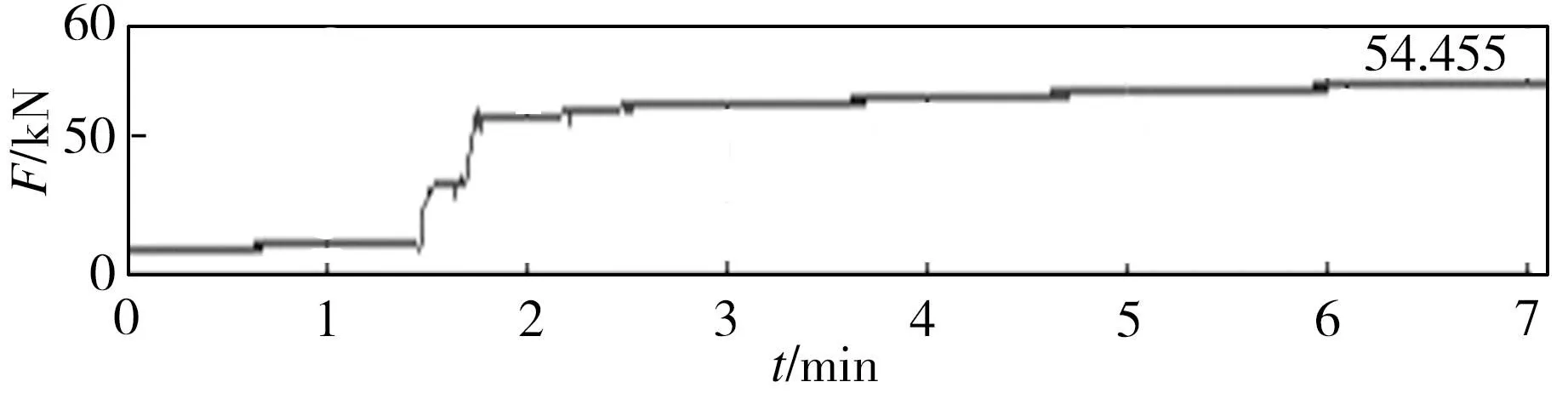
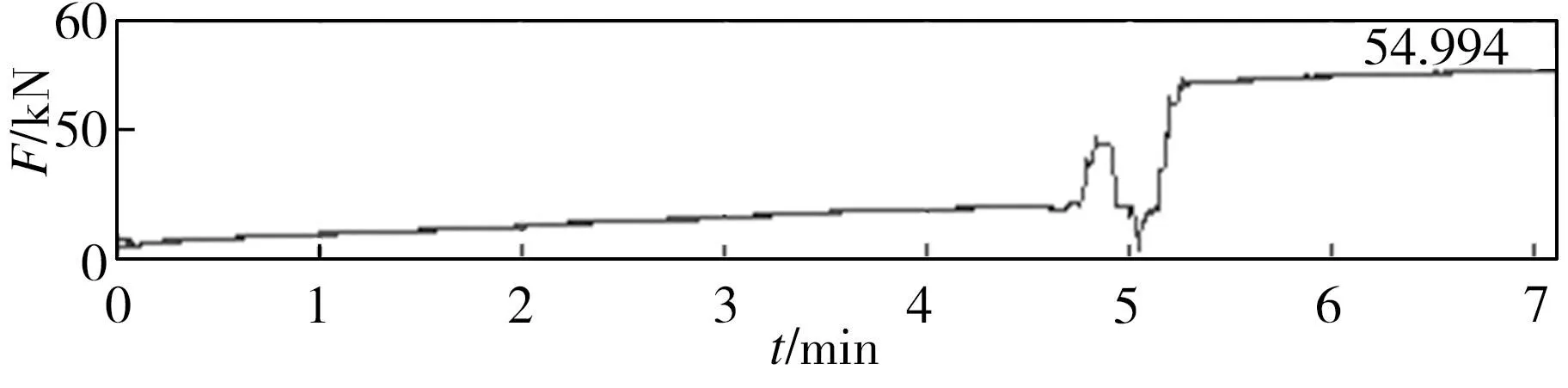
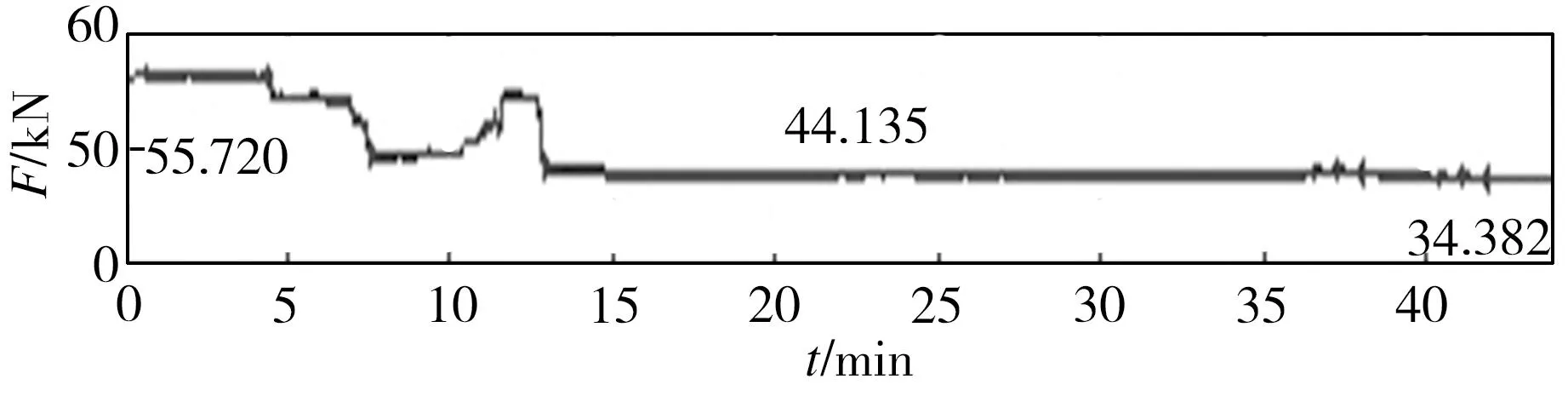
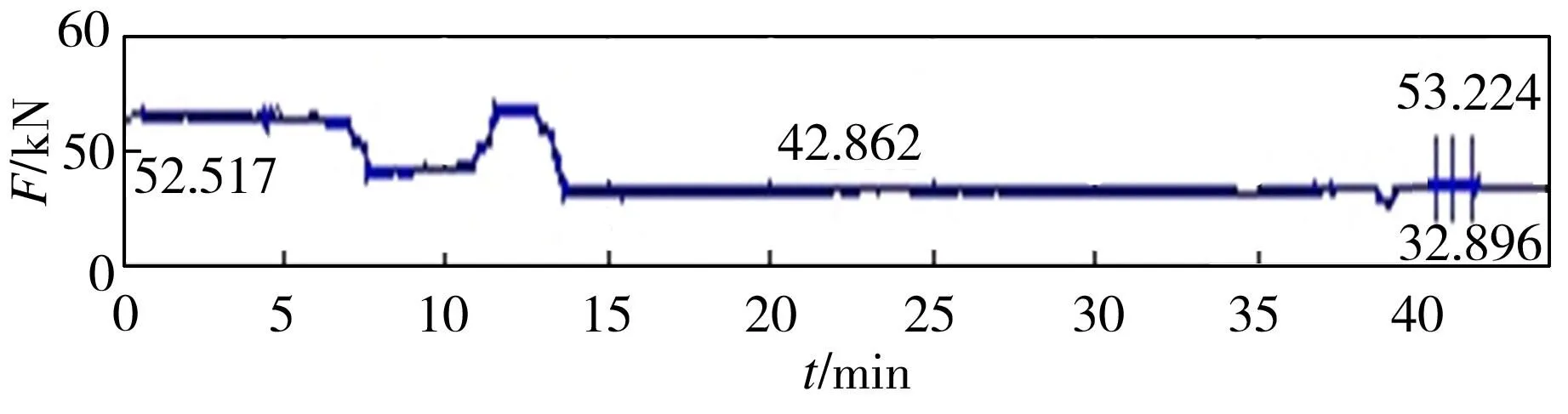
然后進(jìn)行持續(xù)約45 min的應(yīng)力測(cè)試工況,測(cè)試過程中吊車的運(yùn)行情況如表1所示,得到螺栓受力信號(hào)曲線如圖7所示。
(a) 1#測(cè)點(diǎn)
(b) 2#測(cè)點(diǎn)
(c)3#測(cè)點(diǎn)
(d) 4#測(cè)點(diǎn)
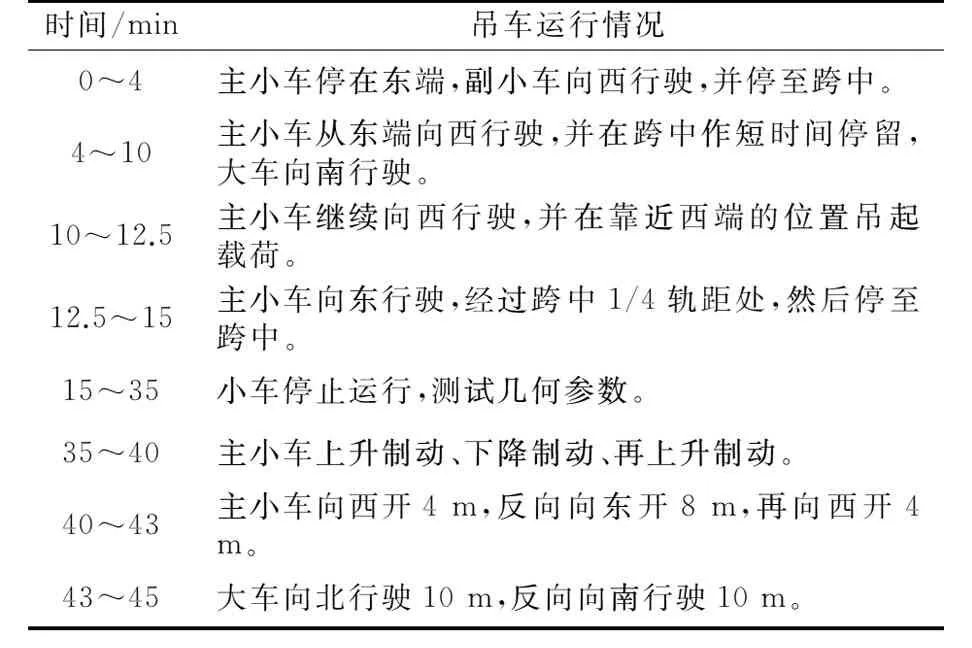
時(shí)間/min吊車運(yùn)行情況0~4主小車停在東端,副小車向西行駛,并停至跨中。4~10主小車從東端向西行駛,并在跨中作短時(shí)間停留,大車向南行駛。10~12.5主小車?yán)^續(xù)向西行駛,并在靠近西端的位置吊起載荷。12.5~15主小車向東行駛,經(jīng)過跨中1/4軌距處,然后停至跨中。15~35小車停止運(yùn)行,測(cè)試幾何參數(shù)。35~40主小車上升制動(dòng)、下降制動(dòng)、再上升制動(dòng)。40~43主小車向西開4m,反向向東開8m,再向西開4m。43~45大車向北行駛10m,反向向南行駛10m。
由于整個(gè)應(yīng)力測(cè)試工況持續(xù)時(shí)間很長(zhǎng),某一短時(shí)間段的螺栓應(yīng)力微小波動(dòng)被整體時(shí)間段的應(yīng)力波拉直,但是從圖7中仍可看出各測(cè)點(diǎn)處螺栓受力出現(xiàn)明顯波動(dòng)的時(shí)間段(特別是40~43 min)都是小車經(jīng)過跨中區(qū)域的時(shí)間段,而遠(yuǎn)離跨中區(qū)域的小車行駛以及大車南北行駛都對(duì)測(cè)點(diǎn)螺栓受力影響很小,這種現(xiàn)象與理論相符合。
螺栓型號(hào)為M24,焊縫內(nèi)環(huán)直徑為24 mm,外環(huán)直徑為32 mm,焊縫環(huán)形面積為352 mm2,通常認(rèn)為角焊縫以45°方向的最小截面為有效截面[9],故焊縫有效截面面積取248 mm2。將整個(gè)測(cè)試時(shí)間歷程的螺栓受力測(cè)試結(jié)果換算為焊縫應(yīng)力,結(jié)果如表2所示。
(a) 1#測(cè)點(diǎn)
(b) 2#測(cè)點(diǎn)
(c)3#測(cè)點(diǎn)
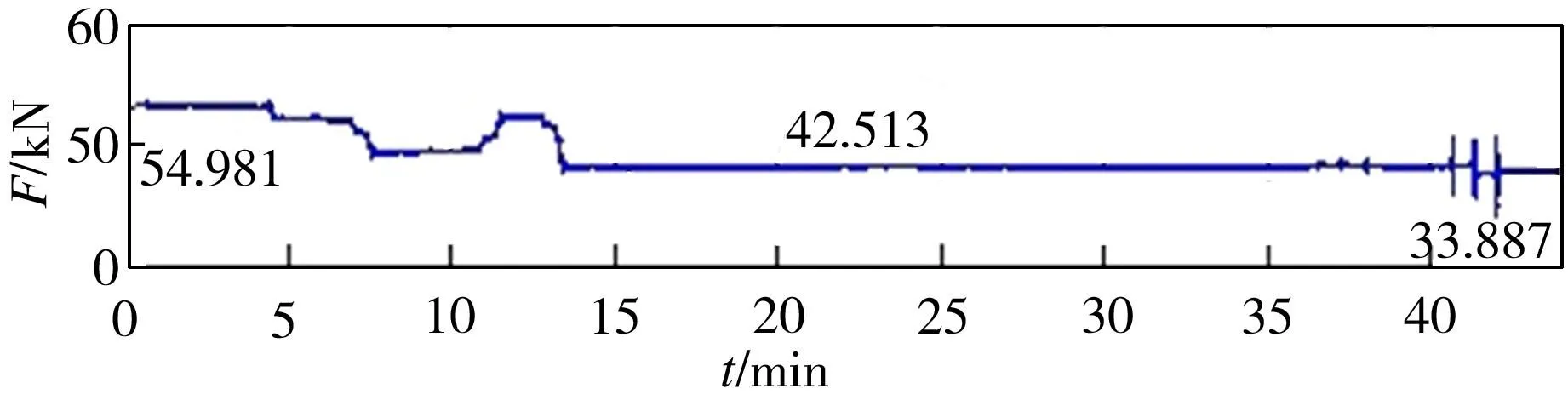
(d) 4#測(cè)點(diǎn)
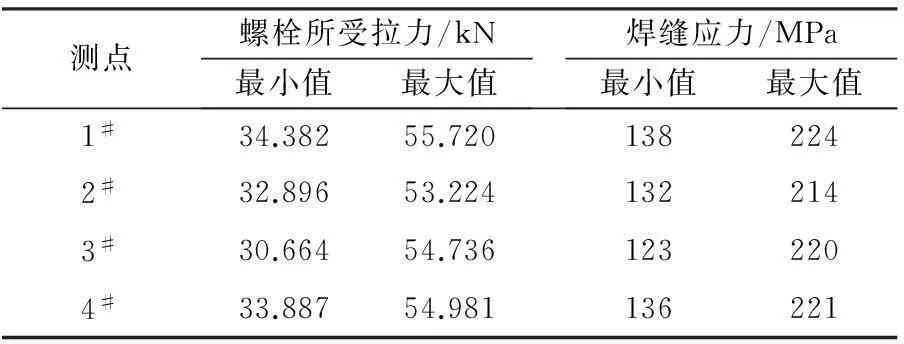
測(cè)點(diǎn)螺栓所受拉力/kN最小值最大值 焊縫應(yīng)力/MPa最小值最大值1#34.38255.7201382242#32.89653.2241322143#30.66454.7361232204#33.88754.981136221
2.3模擬結(jié)果與實(shí)測(cè)結(jié)果對(duì)比
測(cè)點(diǎn)處螺栓在人工預(yù)緊時(shí),小車位于端部且處于空載狀態(tài)。從靜力學(xué)角度分析的話,測(cè)量處焊縫受力最小值出現(xiàn)在小車滿載停于跨中時(shí),其值約為43 kN,最大值出現(xiàn)在小車停于端部區(qū)域時(shí),其值約為54 kN。但是,實(shí)測(cè)中,40~43 min小車滿載來回跨中區(qū)域行駛時(shí),產(chǎn)生的焊縫應(yīng)力最小值約為32 kN,最大值約為54 kN,焊縫應(yīng)力實(shí)測(cè)最小值突破靜力學(xué)最小值,正好符合動(dòng)力學(xué)振動(dòng)疊加理論。
有限元仿真工況與現(xiàn)場(chǎng)測(cè)試時(shí)40~43 min階段的工況相類似,都是小車滿載來回跨中區(qū)域行駛。仿真值與實(shí)測(cè)結(jié)果比較如表3所示。由表3中可以看出,焊縫處應(yīng)力值的模擬結(jié)果與實(shí)測(cè)結(jié)果的誤差較小,表明仿真結(jié)果是有效的。

表3 焊縫應(yīng)力仿真值與實(shí)測(cè)結(jié)果的比較
3結(jié)語
本文采用等效螺栓焊縫動(dòng)力學(xué)仿真方法,從動(dòng)力學(xué)角度對(duì)起重機(jī)軌道壓板螺栓焊縫開裂的現(xiàn)象進(jìn)行了分析,并將有限元仿真結(jié)果與現(xiàn)場(chǎng)實(shí)測(cè)數(shù)據(jù)進(jìn)行對(duì)比,驗(yàn)證了等效螺栓焊縫動(dòng)力學(xué)仿真方法的正確性與有效性。等效螺栓焊縫動(dòng)力學(xué)仿真方法不僅可以減少軌道壓板螺栓焊縫分析的計(jì)算量,又可以提高計(jì)算精度,為復(fù)雜機(jī)構(gòu)的動(dòng)力學(xué)仿真提供了一種簡(jiǎn)化途徑。等效螺栓焊縫動(dòng)力學(xué)仿真將有限元與動(dòng)力學(xué)相結(jié)合,可以求出螺栓焊縫在各種工況下的動(dòng)應(yīng)力,形成應(yīng)力譜,為進(jìn)一步進(jìn)行焊縫疲勞分析提供力學(xué)依據(jù)。
參考文獻(xiàn)
[1]徐志良. 起重機(jī)軌道固定裝置的合理選用[J].起重運(yùn)輸機(jī)械,2010(5):56-58.
[2]吳愛京.起重機(jī)軌道壓板受力計(jì)算[J].起重運(yùn)輸機(jī)械,2007(11):14-17.
[3]魏國前,劉峰.起重機(jī)軌道壓板布置對(duì)壓板受力狀況的影響研究[J].現(xiàn)代制造工程,2009(8):130-134.
[4]饒剛,朱平.起重機(jī)增容后主小車軌道壓板螺栓焊縫開裂研究[J].機(jī)電產(chǎn)品開發(fā)與創(chuàng)新,2008,21(2):64-66.
[5]韓鐵拴,王中明,王甲子.酸軋機(jī)組活套軌道壓板螺栓松動(dòng)研究[J].冶金設(shè)備,2013( S1):13-15.
[6]Shigley J E, Mischke C R, Budynas R G, et al.Mechanical engineering design[M]. New York:McGraw-Hill, 2004:382-384.
[7]曹建永,王鐵. 基于ANSYS和ADAMS的觀光車車架聯(lián)合仿真[J].機(jī)械設(shè)計(jì)與制造,2012(11):100-102.
[8]董達(dá)善,孫友剛,劉龍.基于虛擬樣機(jī)技術(shù)的鋼絲繩動(dòng)張力仿真研究[J].機(jī)床與液壓,2013,41(17):156-158,162.
[9]劉聲揚(yáng).高強(qiáng)螺栓和焊縫混合連接的受力性能分析[J].工業(yè)建筑,1985(6):24-27.
[責(zé)任編輯鄭淑芳]
Equivalent simulation of dynamics of the rail clamp bolt weld
FanQin,GeWenhao,WeiGuoqian
(College of Machinery and Automation, Wuhan University of Science and Technology, Wuhan 430081, China)
Abstract:To resolve the breakage of the rail clamp bolt weld on cranes, an equivalent dynamics simulation method was proposed. With a steelworks ladle crane as the object, Adams and HyperMesh joint simulation was carried out. In Adams, tension and compression spring damper plate was employed to simulate weld nut squeezing and weld connection in order to reduce the amount of finite element calculation. In HyperMesh, bridge beams received flexible treatment to improve the vibration accuracy of the simulation model in the vertical direction. The finite element simulation results were compared with the measured values, and it is shown that the simulation results of the stress on the weld agree well with the measured values, which suggests that the proposed equivalent dynamics simulation method is correct and effective.
Key words:trolley-rail; rail clamp; bolt weld; rigid-flexible coupling; equivalent simulation; spring-damper; dynamic simulation
收稿日期:2015-12-31
基金項(xiàng)目:國家自然科學(xué)基金資助項(xiàng)目(11472200).
作者簡(jiǎn)介:范勤(1960-),男,武漢科技大學(xué)教授.E-mail:877271593@qq.com
中圖分類號(hào):TH215
文獻(xiàn)標(biāo)志碼:A
文章編號(hào):1674-3644(2016)03-0209-05
