
基于Inpho軟件空三數據處理及其精度分析
2016-06-15 21:21:50陸康
科技資訊 2015年36期
陸康
DOI:10.16661/j.cnki.1672-3791.2015.36.024
摘 要:本文對傳統攝影測量到新數字時代下技術更新換代對比總結,通過基于新型傳感器下的空三加密研究及其精度分析,討論了POS數據輔助下Inpho軟件的空三加密基本流程,并展開多組生產數據對比試驗,發現 POS數據輔助下新攝影測量系統下,在減少了外控點數量的同時,誤差變化平穩,仍能保持很高的精度,說明均勻布設外業控制點適用于傳統模式的相機拍攝同樣也適用于新型數碼相機的拍攝,加入POS數據輔助空中三角測量,可以有效地減少地面控制點的數量,從而縮短生產時間,提高生產效率。
關鍵詞:攝影測量 空中三角測量 POS 誤差
中圖分類號:P231.5 文獻標識碼:A 文章編號:1672-3791(2015)12(c)-0024-02
隨著測繪技術和計算機技術的不斷發展,攝影測量已由解析攝影測量發展到全數字攝影測量階段。傳統的航空攝影測量主要以膠卷式影像應用為主,以其周期短,成本低,精度高等優點成為地形圖成圖的重要手段之一。近些年,在工程生產中引進了機載激光雷達等技術,進而可克服航攝中天氣的影響,結合GPS/IMU系統下高精度POS數據,減少了中間環節,保證精度的同時還可以同步得到正射影像等多種相關地圖數據產品,目前不僅在地形測圖,在城市規劃、電力系統、國土資源整治、林業管理、環境保護等領域也得到越來越廣泛的應用。
1 全自動空中三角測量
數字攝影測量生產作業中,空中三角測量(簡稱空三加密)是關鍵工序之一,影響著是航測產品質量與工作效率。空三加密是確定整個測區的定位和定姿,從而獲得測區內任意點的絕對坐標,依據提供的定向控制點和像片定向參數,確定區域內所有影像的外方位元素,從而求出該點所對應的物方空間三維坐標。如果將影像點坐標觀測值與地面控制點坐標一道進行區域網平差,這便是經典的解析空中三角測量方法;如果將該觀測值與GPS/POS數據(必要時可加入少量的地面控制點)一并進行區域網聯合平差,即形成了GPS/POS輔助空中三角測量。
自動空中三角測量作業過程,對于模型連接點,利用多像影像匹配算法可高效、準確、自動地量測其影像坐標,完全取代了常規航空攝影測量中由人工逐點量測像點坐標的作業模式。對于區域網中的地面控制點,目前還缺乏行之有效的算法來自動定位其影像,只能將數字攝影測量工作站當作光機坐標量測儀由作業員手工量測。從攝影測量軟件角度講,當前的自動空中三角測量,已是高效率、自動化程度很高的工序之一,如果能利用上GPS/POS數據,進行GPS/POS輔助空中三角測量,則其效率可望進一步提高,在有些情況下,即可實現全自動化空中三角測量。對GPS/POS輔助空中三角測量而言,若要進行高精度點位測定,至少在區域網的四角需要量測4個地面控制點;如果是進行高山區中小比例尺的航空攝影測量測圖,則可考慮采用無地面控制的空中三角測量方法,此時可完全用GPS/POS攝站坐標取代地面控制點,實現真正意義上的全自動空中三角測量。
2 POS定義
所謂機載定位定向系統POS(Position and Orientation System)是基于全球定位系統(GPS)和慣性測量裝置(IMU)的直接測定影像外方位元素的現代航空攝影導航系統,可用于在無地面控制或僅有少量地面控制點情況下的航空遙感對地定位和影像獲取。該技術的引進,使得生產工藝中數據獲取和處理也隨之發生改變。而工程生產中空三軟件效率的高低直接影響著項目進度。
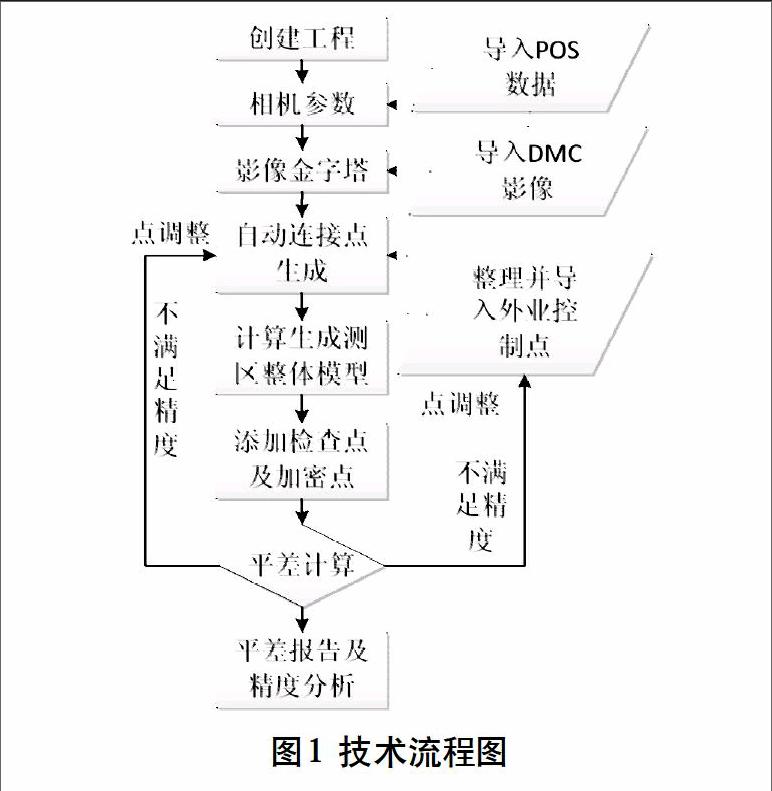
3 POS數據輔助下的空三處理
技術流程如圖1所示。
更新換代之際,該單位生產也處于過渡,在實際工作中常常會出現傳統的膠卷式影像和數碼影像同時作業的情況。那么引入POS數據,與傳統工藝相比,空三加密流程工藝以及精度都會有哪些變化和影像呢,這里大家可對Inpho軟件和傳統HELAVA數字攝影測量工作站做數據處理實驗,比較專門處理數碼影像的空三加密軟件和傳統的空三加密軟件處理數碼影像之間是否通用性,探討下其對空三加密精度的影響,以及Inpho軟件的在新工藝下的優缺點。
4 數據實驗及其精度分析
該次試驗選用工程中某段外控點比較密集的地區,位于東經117°15′~119°20′,北緯34°10′~34°50′,地勢平坦。采用2000國家大地坐標系為平面坐標系,1985國家高程基準為高程系統。所收集測區成果資料,平面點為國家四等(GPS點為C級)及以上點,高程點為國家四等及以上水準點。航攝資料為收集的DMC2001數碼相機拍攝的像片,焦距f=120 mm的鏡頭,攝影比例尺約1∶20 000左右,航向南北飛行,航向重疊為60%~65%,像元尺寸為12 μm,影像尺寸為14 000×8 000像素,地面分辨率GSD為0.24 m,像幅大小為96mm×168 mm。
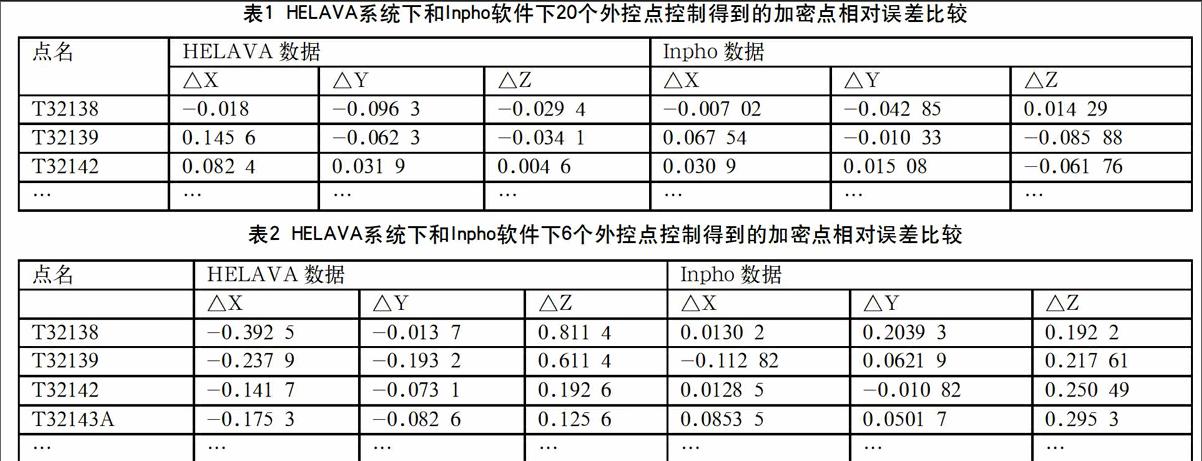
傳統的生產模式下要求外控點足夠多且分布均勻,如圖所示。該實驗區內可獲得均勻分布的20個外控點。可在兩個軟件下,考察20個外控點全控制下,以及均勻抽取僅邊界6個控制點控制下(其他控制點作為檢查點)得到的檢查點和加密點精度變化。實驗結果分析表如表1。
從表1可以看出,20個外控點全控制下,HELAVA和Inpho兩個系統處理得到的加密點的平面、高程的相對誤差都在0.26以內,對于制作1∶2 000地形圖而言精度都已足夠。也即說明在外控點足夠多情況下,各軟件系統處理數據都比較穩定的,精度可靠。當控制點相對較少時,參考表2,HELAVA系統誤差值較前面控制點比價多的情況下變化比較大,而導入POS數據的Inpho系統下誤差變化較平穩,仍能保持很高的精度。
同時,對該實驗區控制點數據,尤其是區域邊界控制點數據做平、高的選擇實驗,發現,平、高點的控制精度高于全控制點的精度,也即說明,多增加外業控制點并不能提高整個區域的加密精度。
5 結語
很明顯,隨著外業控制點的減少,Inpho系統的穩定性明顯強于HELAVA系統。這些結果也說明,外業控制點的分布對兩個系統的影響是相同的,均勻布設外業控制點適用于傳統模式的相機拍攝同樣也適用于新型數碼相機的拍攝,加入POS數據輔助空中三角測量,可以有效地減少地面控制點的數量。同時在實際工作中,應該讓有限的外業控制點盡可能均勻分布于整個測區,這樣有助于提高測區成果精度。
參考文獻
[1] 張祖勛,張劍清.數字攝影測量學[M].武漢:武漢大學出版社, 1997.
[2] 劉江瑜.基于新型傳感器的空三加密研究及精度分析[D].武漢:武漢大學,2012.
[3] 查燕萍,張華平.數字攝影測量發展現狀與趨勢初探[J].江西測繪,2009(4):4-6.
