一種基于LMS的振動(dòng)信號(hào)相位差自適應(yīng)無偏估計(jì)方法及應(yīng)用
2016-06-17 01:46:14楊輝躍涂亞慶張海濤
振動(dòng)與沖擊 2016年10期
楊輝躍, 涂亞慶, 張海濤, 李 明
(后勤工程學(xué)院 信息工程系,重慶 401311)
一種基于LMS的振動(dòng)信號(hào)相位差自適應(yīng)無偏估計(jì)方法及應(yīng)用
楊輝躍, 涂亞慶, 張海濤, 李明
(后勤工程學(xué)院 信息工程系,重慶401311)
摘要:針對(duì)振動(dòng)信號(hào)相位差估計(jì)問題,提出了一種基于LMS的自適應(yīng)無偏估計(jì)方法。該方法通過一路信號(hào)與其正交的三角運(yùn)算來配準(zhǔn)另一路信號(hào),相位差的正切值等于兩個(gè)配準(zhǔn)系數(shù)之比;根據(jù)均方誤差最小原則對(duì)配準(zhǔn)系數(shù)進(jìn)行迭代更新,從而實(shí)現(xiàn)相位差自適應(yīng)估計(jì);理論推導(dǎo)出噪聲引起的估計(jì)偏差,并據(jù)此對(duì)估計(jì)結(jié)果進(jìn)行偏差補(bǔ)償,實(shí)現(xiàn)相位差無偏估計(jì),給出了補(bǔ)償公式和方法流程。實(shí)驗(yàn)結(jié)果表明:該方法能準(zhǔn)確估計(jì)出兩路同頻振動(dòng)信號(hào)相位差,經(jīng)偏差補(bǔ)償后估計(jì)精度顯著提高;在相位差發(fā)生突變時(shí),能進(jìn)行快速跟蹤測(cè)量,具有較好動(dòng)態(tài)測(cè)量特性;該方法在變化流量下科氏流量計(jì)振動(dòng)信號(hào)相位差估計(jì)中的應(yīng)用,驗(yàn)證了方法的工程實(shí)用性。
關(guān)鍵詞:相位差; 自適應(yīng); 無偏估計(jì); LMS算法; Hilbert變換
相位差測(cè)量技術(shù)在振動(dòng)分析、故障診斷、電力系統(tǒng)、儀器儀表、智能控制等諸多領(lǐng)域應(yīng)用中有著重要意義[1-3]。現(xiàn)有諸如過零鑒相[4]、數(shù)字相關(guān)[5-6]、DFT譜分析[7]等方法在動(dòng)態(tài)相位差估計(jì)方面存在各自不足。過零鑒相法利用兩路信號(hào)過零點(diǎn)的時(shí)間計(jì)算相位差,計(jì)算速度快,但硬件成本高;數(shù)字相關(guān)法利用兩路信號(hào)的相關(guān)函數(shù)估計(jì)相位差,對(duì)隨機(jī)噪聲抑制能力強(qiáng),但受諧波影響較大且要求同步采樣;DFT譜分析將信號(hào)從時(shí)域變換到頻域,利用相頻關(guān)系估計(jì)相位差,應(yīng)用廣泛,但受譜泄漏影響。最小均方(LMS)自適應(yīng)算法[8]由于無需信號(hào)先驗(yàn)知識(shí),且計(jì)算簡(jiǎn)便,易于實(shí)現(xiàn),廣泛應(yīng)用于自適應(yīng)濾波器、頻率跟蹤、時(shí)延估計(jì)等領(lǐng)域[9-12]。文獻(xiàn)[13]通過自適應(yīng)相位計(jì)跟蹤信號(hào)相位變化,利用兩個(gè)相位計(jì)的估計(jì)值之差實(shí)現(xiàn)相位差估計(jì),但難以估計(jì)動(dòng)態(tài)相位差;文獻(xiàn)[14]通過對(duì)輸入信號(hào)進(jìn)行自適應(yīng)延遲補(bǔ)償,使得補(bǔ)償后的信號(hào)與參考信號(hào)對(duì)齊,并在最小均方誤差準(zhǔn)則下對(duì)延遲補(bǔ)償因子進(jìn)行計(jì)算和修正,由延遲補(bǔ)償因子獲得相位差,但受噪聲影響存在估計(jì)偏差。
本文利用一路信號(hào)與其正交變換來配準(zhǔn)另一路信號(hào),并根據(jù)最小均方誤差對(duì)配準(zhǔn)系數(shù)進(jìn)行自適應(yīng)更新,針對(duì)估計(jì)偏差問題在迭代過程中進(jìn)行了偏差補(bǔ)償,實(shí)現(xiàn)相位差自適應(yīng)無偏估計(jì)。
1方法原理
1.1基本思想
設(shè)兩路同頻實(shí)正弦信號(hào)采樣序列為s1(k),s2(k):

k=1,2,…,N
(1)
式中,A為信號(hào)幅值,θ1,θ2為初始相位,角頻率ω0=2πf0/fs,fs為采樣頻率,n1(k)和n2(k)是零均值,方差為σ2的高斯白噪聲,N為采樣長(zhǎng)度。

(2)
估計(jì)誤差:
ε(k)=Asin(ω0k+θ1)-ws(k)Asin(ω0k+θ2)-
wc(k)Acos(ω0k+θ2)+n3(k)
(3)
系數(shù)ws(k)和wc(k)中蘊(yùn)涵相位差Δθ信息,利用LMS算法對(duì)ws(k)和wc(k)進(jìn)行自適應(yīng)更新,在均方誤差E[ε2(k)]→min時(shí)即可解算出相位差Δθ。
1.2相位差計(jì)算

Δθ=θ1-θ2=arctan(wc/ws)
(4)
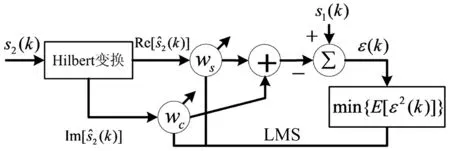
圖1 相位差自適應(yīng)估計(jì)原理Fig.1 Principle of the phase difference adaptive estimation
1.3自適應(yīng)更新
對(duì)ws(k)和wc(k)采用LMS最大梯度迭代算法進(jìn)行自適應(yīng)計(jì)算,有:
(5)
式中,μ為步長(zhǎng)。
1.4估計(jì)偏差與補(bǔ)償
由于噪聲影響,式(5)的計(jì)算結(jié)果通常存在偏差。穩(wěn)態(tài)條件下,設(shè)
ws(k)≈ws0,wc(k)≈wc0
δws(k)=ws(k)-ws0,δwc(k)=wc(k)-wc0
(6)
代入式(3),整理可得:
ε(k)=-δws(k)Asin(ω0k+θ2)-
δwc(k)Acos(ω0k+θ2)+n3(k)
(7)
考慮噪聲,對(duì)式(5)兩邊同時(shí)減去ws0或wc0,得:
δws(k+1)=δws(k)-με(k)s2(k)
(8)
兩邊取期望,有,
E[δws(k+1)]=E[δws(k)]-μE[ε(k)s2(k)]=
(9)
穩(wěn)態(tài)條件下,一般有
E[δws(k+1)]|k→∞=
E[δws(k)]|k→∞=E[δws(∞)]
(10)
考慮到噪聲相關(guān)性,聯(lián)合式(9)和(10)有:
(11)
同理,可得:
(12)
可見,相位差估計(jì)是有偏的,偏差大小與信噪比SNR、步長(zhǎng)μ以及對(duì)ws(k)和wc(k)的穩(wěn)態(tài)值有關(guān)。
穩(wěn)態(tài)下,則偏差補(bǔ)償算法為
ws(k+1)=(1+G)ws(k)-με(k)s2(k)
(13)
式中,G=2σ2/μA2。
1.5方法流程
綜上所述,方法流程如圖2所示,具體步驟如下:
步驟1信號(hào)采樣,獲取離散序列s1(k)和s2(k);
步驟2初始化參數(shù)wc(0),ws(0)和步長(zhǎng)μ,估計(jì)信噪比SNR;

步驟6根據(jù)式(13)對(duì)參數(shù)ws(k)和wc(k)進(jìn)行自適應(yīng)更新;
步驟7計(jì)算相位差Δθ=arctan(wc/ws)。

圖2 相位差自適應(yīng)估計(jì)流程Fig.2 Flow of the phase difference adaptive estimation
2性能分析
(14)
以下分析均方誤差
μ2E[{ε(k)s2(k)}2]
(15)
結(jié)合式(11),可推導(dǎo)出
(16)
(17)

(18)
同理,可得
(19)
聯(lián)立式(18)和式(19)解得:
(20)
3實(shí)驗(yàn)結(jié)果
3.1仿真實(shí)驗(yàn)
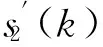
設(shè)信號(hào)頻率f=198 Hz,幅值A(chǔ)=10,相位差分別Δθ=[π/6,π/4,π/3],SNR=30 dB,采樣頻率fs=20 000 Hz,初始化步長(zhǎng)μ=0.48×10-4,利用本文方法估計(jì)相位差,得到估計(jì)結(jié)果如圖3所示。表1給出了穩(wěn)定后的估計(jì)值、均方差及比值校正后的相位差估計(jì)值。由實(shí)驗(yàn)結(jié)果可知,本文方法能準(zhǔn)確估計(jì)出同頻信號(hào)相位差,穩(wěn)態(tài)精度與比值校正法持平;校正前存在顯著偏差,均方誤差為13.832 7,經(jīng)偏差校正后均方誤差為0.081 4,估計(jì)精度明顯提高。
圖3 相位差跟蹤結(jié)果Fig.3 Phase difference estimation
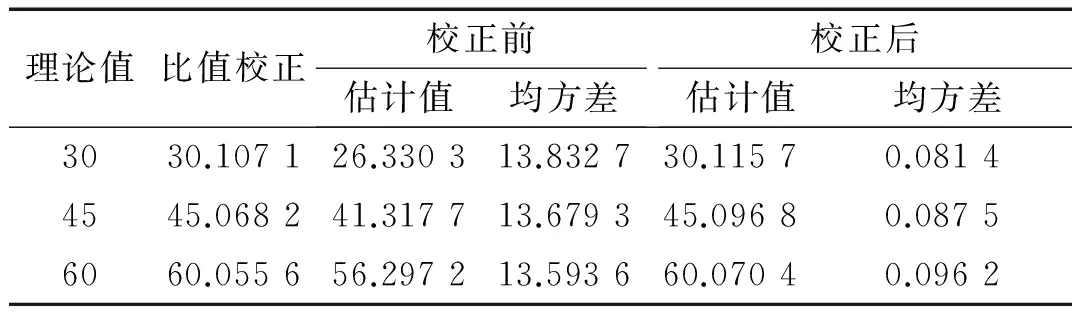
理論值比值校正校正前估計(jì)值均方差校正后估計(jì)值均方差3030.107126.330313.832730.11570.08144545.068241.317713.679345.09680.08756060.055656.297213.593660.07040.0962
自適應(yīng)算法中步長(zhǎng)μ影響收斂速度和穩(wěn)定精度,μ值越大收斂越快,但穩(wěn)態(tài)精度降低,反之則穩(wěn)態(tài)精度高、收斂速度慢。圖4為不同步長(zhǎng)下相位差估計(jì)的穩(wěn)態(tài)精度,可見在校正后方法精度更高。
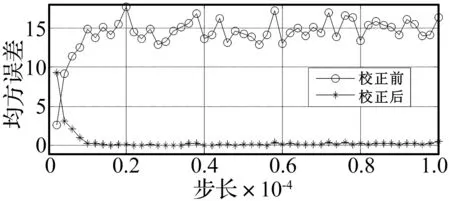
圖4 不同步長(zhǎng)下相位差估計(jì)均方誤差Fig.4 MSEs of phase difference estimation at different steps
圖5給出了不同信噪比下相位差估計(jì)結(jié)果。信噪比較低時(shí),偏差校正效果明顯,當(dāng)SNR>30 dB時(shí),信噪比已非影響精度的主要原因,校正前后精度基本一致。
圖5給出了相位差突變時(shí)本文方法校正前后的跟蹤結(jié)果。相位差發(fā)生突變時(shí),本文方法能實(shí)現(xiàn)有效的跟蹤測(cè)量,且收斂速度快。
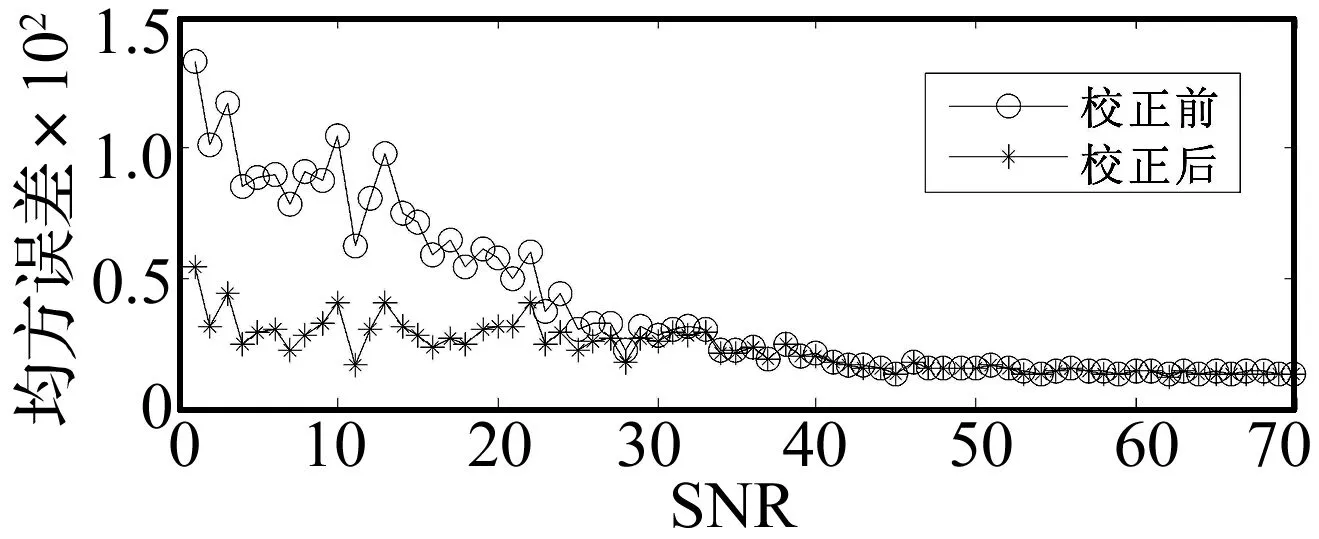
圖5 不同信噪比下相位差估計(jì)均方誤差Fig.5 MSEs of phase difference estimation at different SNRs
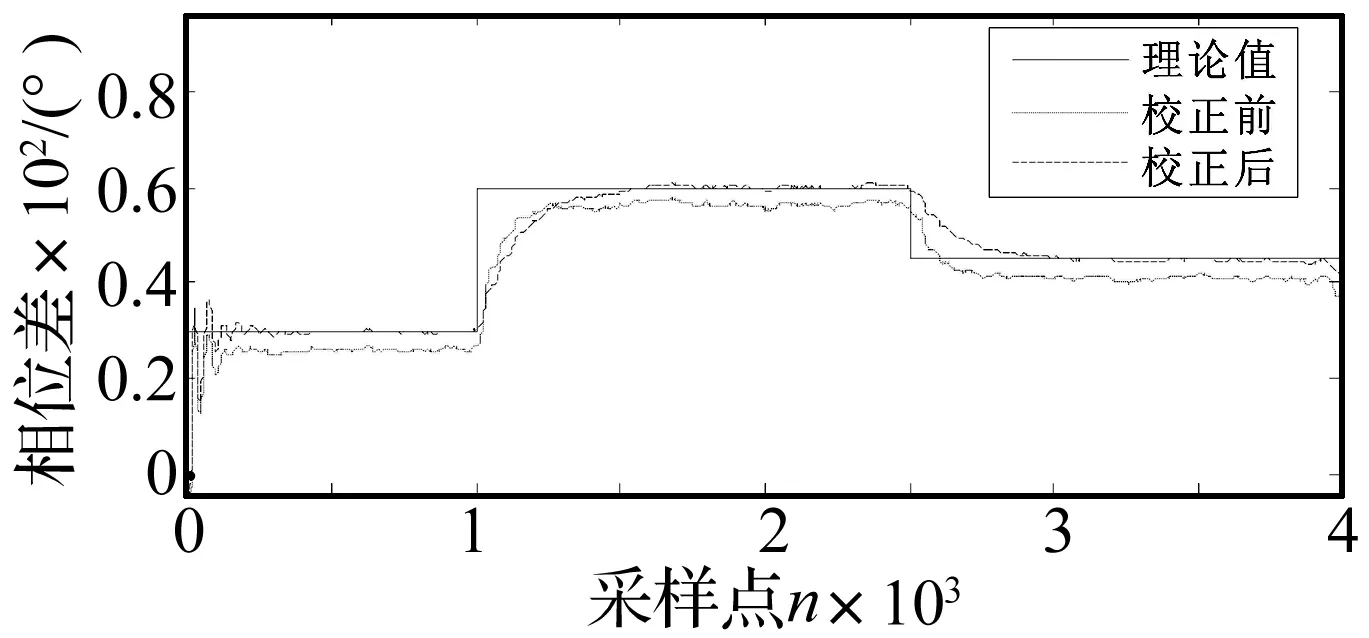
圖6 時(shí)變相位差跟蹤結(jié)果Fig.5 Estimation of time-vary phase difference
3.2應(yīng)用實(shí)驗(yàn)
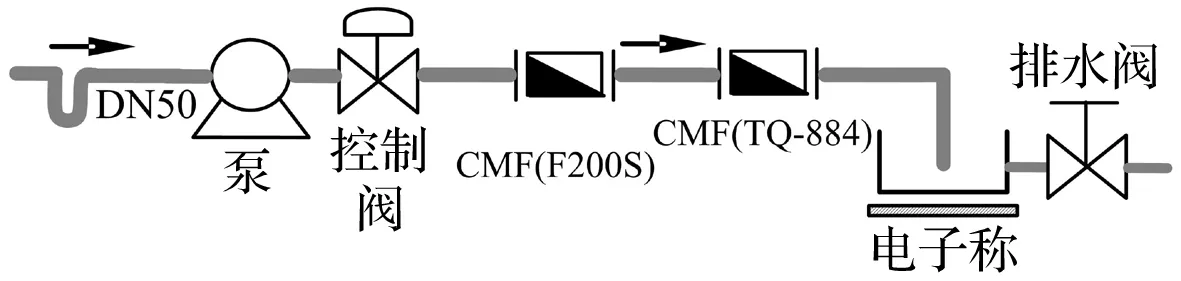
圖7 科氏流量計(jì)實(shí)驗(yàn)平臺(tái)Fig.7 Experiment equipment of Coriolis mass flowmeter
科氏流量計(jì)通過測(cè)量管兩路振動(dòng)信號(hào)的相位差(時(shí)間差)來測(cè)量流體的質(zhì)量流量。利用圖7所示科氏流量計(jì)實(shí)驗(yàn)裝置進(jìn)行應(yīng)用驗(yàn)證,其中羅斯蒙特F200S型科氏流量計(jì)(配1700型變送器,帶MVD技術(shù))振動(dòng)信號(hào)頻率為197.75 Hz。利用NIUSB9234多通道數(shù)據(jù)采集器,以采樣頻率10 kHz采集水流量下科氏流量計(jì)振動(dòng)信號(hào)。采集開關(guān)閥過程中,流量變化下科氏流量計(jì)振動(dòng)信號(hào)。圖8給出了4 000點(diǎn)的采樣波形,可見科氏流量計(jì)信號(hào)較為干凈。利用本文校正方法跟蹤相位差變化,圖9給出了示值流量分別從105.2 kg/min和42.7 kg/min到0 kg/min過程中,本文方法估計(jì)的相位差變化。采用流量計(jì)示值作為參考,推導(dǎo)出相位差變化趨勢(shì)及幅度與本文方法估計(jì)值吻合,說明本文方法在科氏流量計(jì)信號(hào)處理應(yīng)用中是有效可行的。
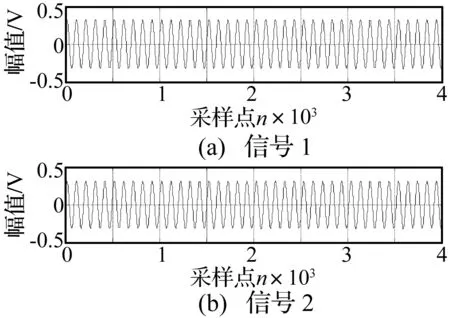
圖8 科氏流量計(jì)信號(hào)時(shí)域波形Fig.8 Signals of Coriolis mass flowmeter
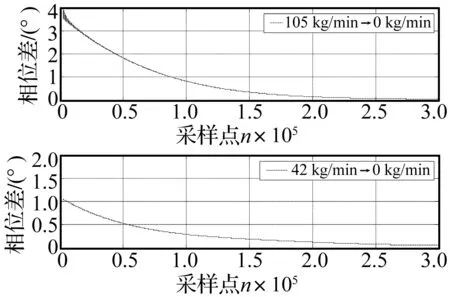
圖9 流量變化時(shí)相位差估計(jì)曲線Fig.9 Phase difference estimation when flow changes
4結(jié)論
針對(duì)同頻信號(hào)相位差估計(jì)問題,本文提出了一種基于LMS的相位差自適應(yīng)無偏估計(jì)方法。給出了方法的基本思想、相位差估計(jì)和偏差校正公式,給出了方法流程,并分析了方法性能。實(shí)驗(yàn)結(jié)果表明本文方法能準(zhǔn)確估計(jì)出振動(dòng)信號(hào)相位差;在相位差發(fā)生突變時(shí),能進(jìn)行快速跟蹤測(cè)量,具有較好動(dòng)態(tài)測(cè)量特性;科氏流量計(jì)應(yīng)用實(shí)驗(yàn)驗(yàn)證了本文方法的工程實(shí)用性。后續(xù)研究將圍繞進(jìn)一步提高估計(jì)精度展開。
參 考 文 獻(xiàn)
[1] Dash P K, Krishnanand K R, Patnaik R K. Dynamic phasor and frequency estimation of time-varying power system signals[J]. Electrical Power and Energy Systems, 2013,44:971-980.
[2] Tu Ya-qing, Zhang Hai-tao, Mao Yu-wen, et al. Unbiased phase delay estimator with negative frequency contribution for real sinusoids[J]. Journal of Applied Sciences, 2013,13(8): 1160-1168.
[3] 楊輝躍, 涂亞慶, 張海濤,等. 一種基于SVD和Hilbert變換的科氏流量計(jì)相位差測(cè)量方法[J]. 儀器儀表學(xué)報(bào), 2012,33(9): 2101-2107.
YANG Hui-yue, TU Ya-qing, ZHANG Hai-tao, et al. Phase difference measuring method based on SVD and Hilbert transform for Coriolis mass flowmeter[J]. Chinese Journal of Scientific Instrument, 2012,33(9): 2101-2107.
[4] 龔國(guó)良,魯華祥. 一種利用固定相移測(cè)量同頻正弦信號(hào)相位差的方法[J].儀器儀表學(xué)報(bào),2010,31(4):873-877.
GONG Guo-liang, LU Hua-xiang. Phase difference measurement method of sine signal with same frequency using aptotic phase shifting[J]. Chinese Journal of Scientific Instrument, 2010,31(4):873-877.
[5] 沈廷鰲, 涂亞慶, 李明,等. 基于相關(guān)原理的相位差測(cè)量改進(jìn)算法及應(yīng)用[J].振動(dòng)與沖擊,2014,33(21): 177-182.
SHEN Ting-ao, TU Ya-qing, LI Ming, et al. An improved method for phase difference measurement based on correlation theory[J]. Journal of Vibration and Shock, 2014,33(21): 177-182.
[6] 沈廷鰲, 涂亞慶, 李明,等. 基于多次互相關(guān)的非整周期信號(hào)相位差測(cè)量算法[J]. 儀器儀表學(xué)報(bào),2014,35(7): 1578-1585.
SHEN Ting-ao, TU Ya-qing, LI Ming, et al. Research on phase difference measurement algorithm for non-integer period sampling signal based on multi-layer correlation[J]. Chinese Journal of Scientific Instrument, 2014,35(7): 1578-1585.
[7] 李炯,王巖飛. DFT相位估計(jì)算法及噪聲敏感頻率問題分析[J].電子與信息學(xué)報(bào),2009,31(9):2101-2103.
LI Jiong, WANG Yan-fei. DFT phase estimation algorithm and noise sensitive frequency region[J]. Journal of Electronics & Information Technology, 2009,31(9): 2101-2103.
[8] Widrow B, Stearns S. Adaptive signal processing[M]. Englewood Cliffs, NJ: Prentice-HaIl, 1985.
[9] 吳慧娟, 文玉梅, 李平. 低信噪比下的LMS自適應(yīng)無偏時(shí)延估計(jì)[J]. 電子學(xué)報(bào),2009,37(3):500-505.
WU Hui-juan, WEN Yu-mei, LI Ping. Bias-free LMS time delay estimation at low signal-to-noise ratio leves[J]. Acta Electronica Sinica, 2009,37(3):500-505.
[10] Rahmat A H, Mahdi T E. Adaptive filter design based on the LMS algorithm for delay elimination in TCR/FC compensators[J]. ISA Transactions, 2011,50:142-149.
[11] Xia Y L, Danilo P M. A widely linear least mean phase algorithm for adaptive frequency estimation of unbalanced power systems[J]. Electrical Power and Energy Systems, 2014,54:367-375.
[12] 楊輝躍, 涂亞慶, 張海濤,等. 振動(dòng)信號(hào)頻率跟蹤的反饋修正自適應(yīng)陷波器法[J].振動(dòng)與沖擊, 2014,33(3):145-149.
YANG Hui-yue, TU Ya-qing, ZHANG Hai-tao, et al. Feedback corrected adaptive notch filter for vibration signal frequency tracking[J].Journal of Vibration and Shock, 2014,33(3):145-149.
[13] 翟春平. 自適應(yīng)相位差估計(jì)器[J]. 艦船科學(xué)技術(shù),2011, 33(4):65-68.
ZHAI Chun-ping. Adaptive phase difference estimate[J]. Ship Science and Technology,2011,33(4):65-68.
[14] 羅柏文,萬明康, 于宏毅. 兩種基于自適應(yīng)相位補(bǔ)償?shù)腇DOA估計(jì)算法[J]. 數(shù)據(jù)采集與處理,2012,27(1):20-26.
LUO Bai-wen, WAN Ming-kang, Yu Hong-yi. Two algorithms for FDOA estimation based on adaptive phase compensator[J].Journal of Data Acquisition & Processing, 2012,27(1): 20-26.
LMS based phase difference adaptive unbiased estimation method and its application
YANG Hui-yue, TU Ya-qing, ZHANG Hai-tao, LI Ming
(Department of Information Engineering, Logistical Engineering University, Chongqing 401311, China)
Abstract:For phase difference estimation of vibration signals, a LMS based adaptive unbiased estimation method was proposed. In the method, one of the two signals and its orthogonal signal were used to synthesize a new signal which is seen as the estimation of the other signal and the phase difference of the two signals was equal to the ratio of two matching coefficients. The coefficients were adaptively updated to minimize the mean square matching error and then to realize the adaptive estimation of phase difference. The estimation bias resulted from noises was theoretically derived. For improving the precision, the estimated results were compensated according to the estimation bias to obtain an unbiased estimation of phase difference. The compensation formula and process of the proposed method were given out. The experimental results show that the proposed method is able to accurately estimate the phase difference of two signals with the same frequency. The precision of estimation is significantly improved by bias compensation. The proposed method has a good dynamic measurement characteristic which makes it still available when mutations of the phase difference occur. The application of the proposed method in measuring the dynamic phase differences of Coriolis flow meter signals in the varying flow situation verifies its engineering practicability.
Key words:phase difference; adaption; unbiased estimation; LMS algorithm; Hilbert transform
基金項(xiàng)目:國(guó)家自然科學(xué)基金(61271449;61302175);重慶市基礎(chǔ)與前沿研究計(jì)劃項(xiàng)目(CSTC2013JCYJA40030; CSTC2015JCYJBX0017)
收稿日期:2015-03-26修改稿收到日期:2015-05-24
通信作者涂亞慶 男,博士,教授,博士生導(dǎo)師,1963年生
中圖分類號(hào):TP206+.1
文獻(xiàn)標(biāo)志碼:A
DOI:10.13465/j.cnki.jvs.2016.10.009
第一作者 楊輝躍 男,博士,講師,1987年生
E-mail:yq.tu@163.com