基于STM32的無人機噴灑系統
2016-06-18 01:21:05張哲深王春達李寧張全禹綏化學院電氣工程學院黑龍江綏化152061
電子制作 2016年6期
張哲深 王春達 李寧 張全禹綏化學院電氣工程學院 黑龍江綏化 152061
?
基于STM32的無人機噴灑系統
張哲深王春達李寧張全禹
綏化學院電氣工程學院黑龍江綏化152061
項目來源:黑龍江2015年省級大學生創新創業訓練計劃項目
【文章摘要】
介紹了一種基于STM32控制器的農田噴灑系統,通過使用新型的飛控PIX,以及改良硬件設施,對姿態角的控制,提高了無人飛行器的續航能力,簡化了操作,方便農業使用,使農耕人員能在較短時間內掌握該設備的使用方法,只要選擇農田環境以及設置需要的噴灑量就可以進行農田噴灑作業。
【關鍵詞】
六旋翼無人機;飛控PIX;姿態角;直流水泵
0 前言
我國人口眾多,農業在我國有著重要的地位。我國地域廣闊,蟲害有著較大的遷徙性和流動性,害蟲的防治較為復雜,需要大量的專業農藥噴灑人員。但由于農村人口流動量較大,農村人口逐年減少,難以找出較多的專業農藥噴灑人員。現有農耕人員,由于缺乏農藥噴灑方面的相關知識,造成農藥噴灑的效果不理想,而且農耕人員在農藥噴灑后不能及時清洗,對人的身體造成危害,存在安全隱患。為解決以上問題,設計了以STM32F4微型控制器為控制核心,以六旋翼無人機為載體的噴灑系統。
1 系統設計及要求
系統設計框圖如圖1所示。具體要求如下:
(1)控制無人機飛行高度,航速,傾斜角度等;
(2)調整農藥噴灑量,噴灑速率等;
(3)將無人機周圍環境的反饋量返回控制臺,并將控制臺處理數據交給無人機形成系統通信;
(4)無人機可以切換模式,如自穩,定高,定點,懸停,繞圈,自動等模式。
無人飛行器由于機體輕盈,容易受到周圍環境的干擾,導致飛行事故。所以通過控制臺接受飛行環境數據,用以調整飛行姿態。可改變模式,以應對各種不同噴灑環境,比如定高定點模式,可以使飛行器在同一平面上飛行或某一固定點懸停;繞圈模式可以使飛行器在一個圓周上飛行;自動模式則是可以按照控制臺預設飛行計劃飛行。
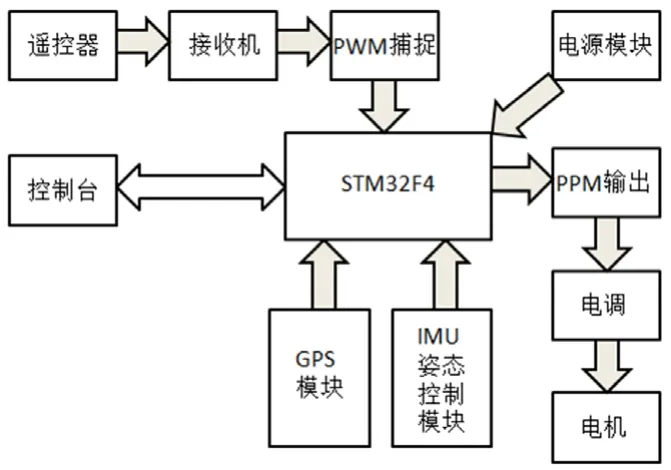
圖1 系統設計框圖
2 硬件部分
2.1飛行控制系統設計
飛行控制部分使用的是3DR公司生產的PIX飛行控制器,硬件部分如圖2所示。MCU采用STM32F4,該控制器具有多達2MB的FLASH存儲器,256KB的數據存儲器以及串口總線,12位ADC等豐富資源。飛控可以擁有14路PWM。傳感器采用ST公司小型L3GD20H 16 bit陀螺芯片,LSM303D 14 bit加速度/磁場芯片以及MEAS公司MS5611氣壓芯片。
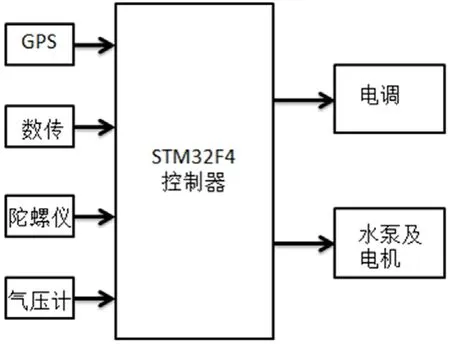
圖2 飛行控制硬件部分
L3GD20H是一個三軸角速度傳感器,特點是功率低。它含有一個傳感元件與一個IC接口,能夠通過數據接口與外界環境檢測到的角速度進行通信。使用的是CMOS設計工藝,是一種高水平集成元件,通過修正電路,根據特性制造IC接口以更好地匹配傳感元件。L3GD20H為了用戶能夠測量貸款速率,配備了滿刻度的±245 /±500 /±2000 dps。其可操作溫度在零下40℃至零上85℃之間,采用LGA封裝。
LSM303D上集成了三軸加速度傳感器和三軸磁感應傳感器,芯片尺寸小,線性加速度的測量范圍在±2G到±16G之間,磁場強度測試范圍從±1.3Gs到±8Gs之間,量程可以自行選擇。芯片在計算能力上較為精確,功耗較低,芯片內置提供了高速與低速兩種I2C串行通信方式。
2.2硬件電路模塊
2.2.1電機
電機采用了戰神MX3508,專為多旋翼設計的無刷電機,扁平設計,多槽極外轉子無刷電機,扭矩大,效率高。電機直徑:42mm,電機長度(無軸):24mm,定子直徑:35mm,定子長度:8mm,軸:4mm,重量:90,電池:3-6Cells,空載電流:0.3A,圖3為電機實物圖。

圖3 電機實物圖
2.2.2無刷電調
由于采用了無刷電機,使用了好盈樂天40A的電調,油門響應速度快,可支持刷新率高達621Hz 的油門信號,兼容各種飛控,持續輸出電流40安,重量26克。
好盈樂天40A電調內部使用了NCP5106B芯片,是NMOS全橋高低端驅動器,其示意圖如圖2.1所示。NMOS低端驅動,即根據NMOS的特性,Vgs大于一定的值就會導通,當源極接地時,只要柵極電壓達到4V左右就可以導通了。當Vgs小于一定值,也會導通,即為NMOS高端驅動,兩種驅動方式可以更好的驅動電機。圖4為好盈樂天40A電調內部構造原理圖。
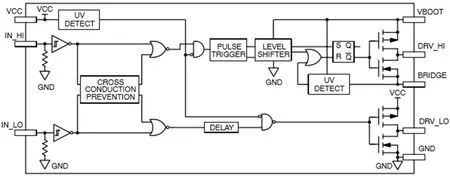
圖4 電調內部構造原理圖

圖5 噴桿示意圖
2.2.3水泵及噴桿
為了噴灑農藥,要采取大功率水泵,保證噴灑壓力。還要保證耗電量,以保持長時間噴灑,為此我們選擇了大功率的洗車泵,壓力在0.5-0.6MPa,流量4L-4.8L,電壓24V,電流2.5A,滿足選擇要求,并且體積較小、重量較輕,方便于安裝在無人飛行器上。噴桿既要滿足噴灑量的需求,也要與水泵相匹配,并且結實耐用,方便安裝于飛行器上。于是我們選用了不銹鋼的四噴頭噴桿,可以進行霧狀噴灑,噴灑范圍大。圖5為噴桿示意圖。
3 軟件部分
軟件部分使用的是德國KEIL公司研發的MDK開發工具。系統由STM32F4微型控制器讀取外部傳感器傳入信息,解讀姿態角,以姿態角與控制信息綜合解算,傳送給六個無刷電機,完成六軸無人飛行器的飛行控制。其中六軸無人飛行器的姿態角采用四元素方法獲得,在打開電源正常工作的情況下,角度誤差控制在2%以內,基本滿足控制需求。軟件流程圖如圖6所示。
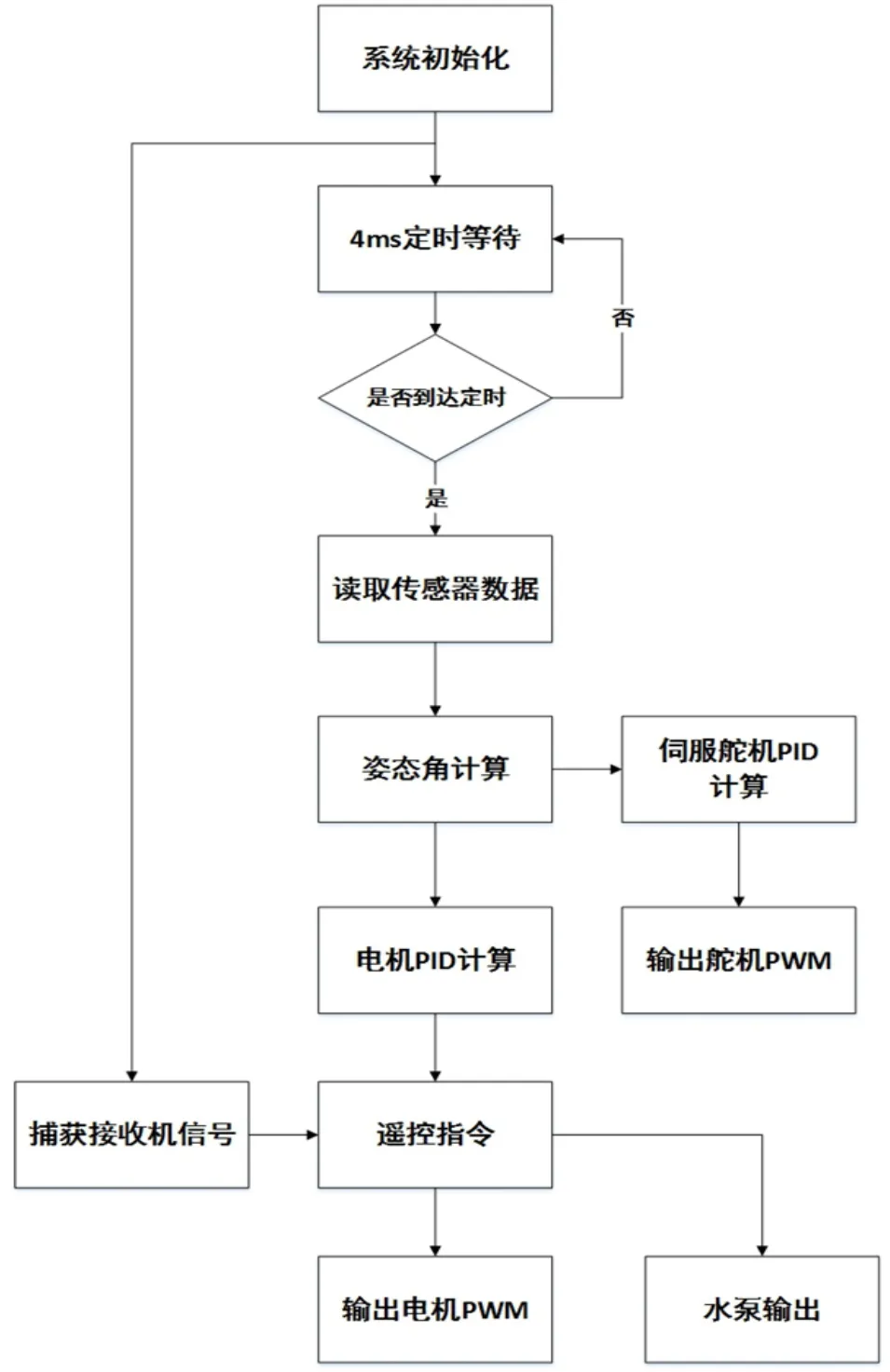
圖6 軟件流程圖
4 實驗與結果分析
4.1實驗數據
按照系統軟件流程圖,通過調整參數及程序,減小誤差,確定了以下試驗內容,測試時噴灑設為兩檔(實際工作模式為旋鈕模式,即噴灑速度可以在兩種模式中間任意變化),低速噴灑以及全速噴灑,在不同的模式下測試飛行反應時間,飛行總時長以及流量大小。
(1)低速模式,系統穩定啟動后,噴灑運行20S,以此測試流量大小。數據如表1所示。
(2)全速模式,系統穩定啟動后,噴灑運行20s,以此測試流量大小。數據如表2所示。
(3)系統從打開電源計時,飛行方式設為自動,用以測試飛機啟動時間以及飛機飛行的極限時間。數據如表3所示。
4.2實驗數據分析
低速模式中測試了三次,噴灑量按照L/ min計算平均值為0.143 L/min,全速模式中的平均值為1.49 L/min,飛機設計時使用載重量為5L的農藥桶, 在低速模式中可以噴灑34.97分鐘,全速模式中可以噴灑3.36分鐘。按照我國農業需求,以每平方米需要12g農藥為例,5KG農藥即可滿足417m2農田的噴灑需求。飛行器可以持續飛行大約1小時,啟動時間在1分鐘左右,按照低速噴灑可以中途換藥桶并且能完成兩次噴灑,足夠滿足我國農業上農藥噴灑的需求。
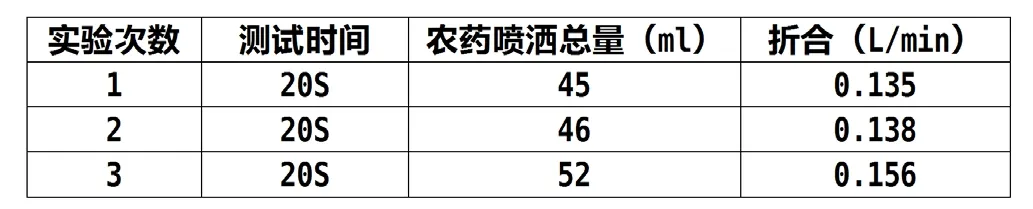
表1 低速模式
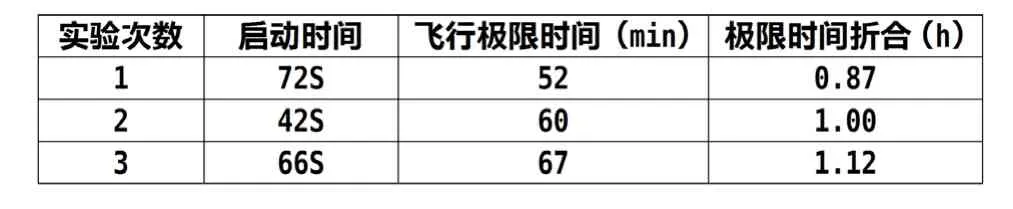
表2 全速模式
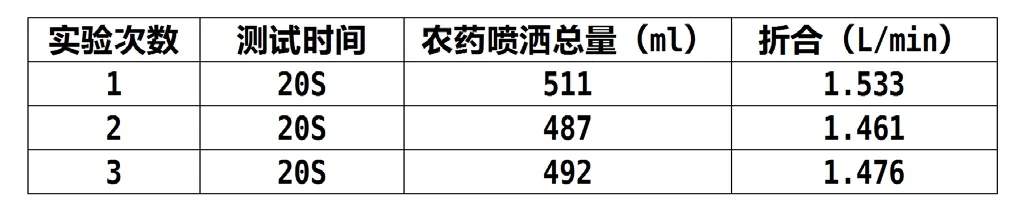
表3 飛行測試
5 結束語
本文設計了一種基于STM32的無人機噴灑系統,實現了農業噴灑的可控性,準確性。根據調整參數可以改變流量,使用起來方便可靠,并且操作簡單。通過簡單地程序設計可以完成多種飛行方式,應對不同的農耕需求以及不同的地域環境。控制臺設計符合人性化,未經過培訓的農耕人員也可以在數小時之內掌握該系統的控制方式,并且熟練操作。
【參考文獻】
[1]王雙懷. 新時期我國農業發展的機遇和挑戰[J]. 陜西師范大學學報:哲學社會科學版, 2003(6):85-91.
[2]王燕路, 陳永真, 王洪寶. 降壓型DC-DC變換器低端驅動的研究[J]. 遼寧工業大學學報:自然科學版, 2015(1):16-20.
[3]孫冬梅, 田增山, 韓令軍. 捷聯慣導系統中四元素法求解姿態角仿真模擬[J]. 彈箭與制導學報, 2009, 29(1):51-53.
[4]關越魏, 何波賢, 于仁清,等. 基于四元數解算陀螺儀姿態角算法的實現[J]. 電腦編程技巧與維護, 2015(9):32-34.
【作者簡介】
張哲深(1995-),男,綏化學院大學生,曾參加了全國電子設計競賽,獲黑龍江賽區大賽一等獎。
通訊作者:張全禹(1984-),男,漢,碩士,主要研究方向為電路與系統設計。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17