基于A(yíng)ndroid平臺(tái)的位置指紋室內(nèi)定位系統(tǒng)研究與設(shè)計(jì)*
2016-06-21 09:18:54許微查峰李豹
艦船電子工程 2016年5期
許 微 查 峰 李 豹
(海軍工程大學(xué)導(dǎo)航工程系 武漢 430033)
?
基于A(yíng)ndroid平臺(tái)的位置指紋室內(nèi)定位系統(tǒng)研究與設(shè)計(jì)*
許微查峰李豹
(海軍工程大學(xué)導(dǎo)航工程系武漢430033)
摘要在研究基于 RSSI(Received Signal Strength Indication)位置指紋室內(nèi)定位算法的基礎(chǔ)上,設(shè)計(jì)了一種基于 Android平臺(tái)的室內(nèi)定位系統(tǒng)。該系統(tǒng)分為定位客戶(hù)端和服務(wù)器端兩部分,同時(shí)設(shè)計(jì)了位置指紋庫(kù)的相關(guān)字段。系統(tǒng)主要應(yīng)用于室內(nèi)人員的定位,不同的系統(tǒng)使用者可以添加各種豐富的基于位置的服務(wù)信息,從而提供LBS。
關(guān)鍵詞接收信號(hào)強(qiáng)度指示; 位置指紋; 室內(nèi)定位系統(tǒng)
Class NumberU666.1
1引言
隨著人們對(duì)基于位置的服務(wù)的需求的迅速增加,室內(nèi)定位的應(yīng)用如雨后春筍,例如:在大型展館中,根據(jù)游覽者的當(dāng)前位置,導(dǎo)游系統(tǒng)可以提供精準(zhǔn)導(dǎo)覽,大大提升用戶(hù)的參觀(guān)體驗(yàn),同時(shí)節(jié)省人力成本;在地下礦藏開(kāi)采中,及時(shí)準(zhǔn)確地掌握工人的位置,有助于提高企業(yè)的管理水平,尤其是在發(fā)生安全事故時(shí),便于應(yīng)急救援的開(kāi)展,最大程度的減少傷亡。
但是傳統(tǒng)的全球衛(wèi)星導(dǎo)航系統(tǒng),如GPS和北斗,在室外定位領(lǐng)域已經(jīng)是功勛卓著,但是在室內(nèi)定位領(lǐng)域(包括森林和地下環(huán)境),由于建筑物對(duì)衛(wèi)星信號(hào)的遮蔽,無(wú)法為室內(nèi)用戶(hù)提供精準(zhǔn)的位置信息,對(duì)于室內(nèi)用戶(hù)的定位的接力棒就交給了室內(nèi)定位系統(tǒng)。
2室內(nèi)定位系統(tǒng)現(xiàn)狀分析
現(xiàn)有的室內(nèi)定位系統(tǒng),由于不能像全球衛(wèi)星導(dǎo)航系統(tǒng),可以一種技術(shù)架構(gòu)適用于所有不用領(lǐng)域、不同需求的解決方案。各個(gè)行業(yè)、各個(gè)應(yīng)用領(lǐng)域的室內(nèi)定位均有各自的技術(shù)特點(diǎn)。因此從不同角度分類(lèi),可以將室內(nèi)定位系統(tǒng)根據(jù)定位技術(shù)和定位算法等進(jìn)行分類(lèi)。
首先,根據(jù)采用的定位技術(shù)的不同,室內(nèi)定位系統(tǒng)可概括分為兩大塊:基于慣性技術(shù)(基于加速度傳感器和陀螺儀等的慣性測(cè)量)和基于短距離無(wú)線(xiàn)技術(shù)(包括紅外、超聲波、藍(lán)牙、射頻標(biāo)簽、Zigbee、UWB和無(wú)線(xiàn)局域網(wǎng)WLAN)。
其次,根據(jù)采用的定位算法的不同,可分為基于距離參數(shù)定位方法和基于非距離參數(shù)定位方法的室內(nèi)定位系統(tǒng)。基于距離參數(shù)定位方法通過(guò)測(cè)量節(jié)點(diǎn)間的距離或角度等信息來(lái)計(jì)算節(jié)點(diǎn)的位置,定位精度相對(duì)較高[1],如 TOA ( Time of Arrival ) 、TDOA ( TimeDifference of Arrival) 、AOA ( Angle of Arrival) 等,需要額外的硬件支持。基于非距離參數(shù)定位方法利用網(wǎng)絡(luò)連通性、相似匹配性等信息實(shí)現(xiàn)定位,在成本和功耗等方面有一定的優(yōu)勢(shì),但定位精度相對(duì)較低,如質(zhì)心算法[2],APIT( Approximate Point-In-Triangulation Test )[3]、DV-Hop ( Distance Vector-hop)[4]、MAP(Mobile Anchor Point)、凸規(guī)劃定位和Ring-Overlapping定位算法[5]等。
因此,如何減少額外硬件設(shè)備,以較低的成本實(shí)現(xiàn)復(fù)雜室內(nèi)環(huán)境下的高精度定位,滿(mǎn)足室內(nèi)用戶(hù)的位置信息需求,成為定位技術(shù)領(lǐng)域的前沿和熱點(diǎn)課題。隨著無(wú)線(xiàn)通信技術(shù)的快速發(fā)展,非主要應(yīng)用于定位的無(wú)線(xiàn)信號(hào)的無(wú)處不在,促使人們利用這些無(wú)線(xiàn)信號(hào)的特征進(jìn)行定位的想法。位置指紋法正是在這樣的背景下顯現(xiàn)出廣泛的應(yīng)用價(jià)值。基于位置指紋的定位技術(shù)主要是基于射頻無(wú)線(xiàn)信號(hào)的目標(biāo)定位方法,目前多應(yīng)用于基于無(wú)線(xiàn)網(wǎng)絡(luò)的定位系統(tǒng),如無(wú)線(xiàn)局域網(wǎng)(WLAN)、GSM網(wǎng)絡(luò)、WCDMA網(wǎng)絡(luò)、ZigBee網(wǎng)絡(luò)等[6~10]。所謂位置指紋,是指目標(biāo)源處于某一位置時(shí),各個(gè)接收器所測(cè)得的某些物理參數(shù)與該位置存在一一對(duì)應(yīng)關(guān)系,即一組物理參數(shù)可唯一地表示一個(gè)目標(biāo)源位置,則可將這組物理量視作該位置的指紋。對(duì)于確定信號(hào)源定位,可用于做指紋的特征物理量有很多,如接收信號(hào)強(qiáng)度、信噪比、功率級(jí)、響應(yīng)速度等,其中最常用的是接收信號(hào)強(qiáng)度(Received Signal Strength, RSS),這是由于大部分無(wú)線(xiàn)網(wǎng)絡(luò)如WLAN和ZigBee 等協(xié)議都支持以接收信號(hào)強(qiáng)度指示(Received Signal Strength Indication, RSSI)的形式提供以dBm為單位的接收信號(hào)強(qiáng)度信息,完全通過(guò)純軟件的方式就能夠?qū)崿F(xiàn)定位。基于位置指紋的定位算法主要分為離線(xiàn)指紋庫(kù)建立階段和在線(xiàn)定位階段[11]:
1) 離線(xiàn)指紋庫(kù)建立階段。此階段在目標(biāo)定位之前進(jìn)行,在部署好的網(wǎng)絡(luò)環(huán)境中,根據(jù)應(yīng)用需求,確定指紋采集點(diǎn)的數(shù)目與位置。之后,接收設(shè)備至各采集點(diǎn)進(jìn)行信號(hào)采集。在每一個(gè)采集點(diǎn)處,將各個(gè)接收器采集到的信號(hào)特征量與采集點(diǎn)的坐標(biāo)一同組成位置指紋庫(kù)。
2) 在線(xiàn)定位階段。當(dāng)目標(biāo)運(yùn)動(dòng)到某一位置時(shí),各個(gè)接收器可接收到RSSI序列,組成一組特征矢量 。將該組矢量與位置指紋庫(kù)中的各組數(shù)據(jù)中特征量部分進(jìn)行匹配,將滿(mǎn)足匹配條件的己存特征矢量所對(duì)應(yīng)的坐標(biāo)或坐標(biāo)的某種組合作為目標(biāo)的位置[12]。
3系統(tǒng)設(shè)計(jì)
本文設(shè)計(jì)的位置指紋室內(nèi)定位系統(tǒng),屬于一個(gè)主動(dòng)定位的基于A(yíng)ndroid平臺(tái)的定位系統(tǒng),一般用于服務(wù)場(chǎng)合。如在大型博覽會(huì)中,用戶(hù)可以通過(guò)自己隨身攜帶的Android終端獲取自己當(dāng)前的位置信息,同時(shí)系統(tǒng)會(huì)根據(jù)用戶(hù)所處的位置將對(duì)應(yīng)的商家服務(wù)信息推送給用戶(hù),這樣便達(dá)到了游覽者和商家雙贏(yíng)的目的;在醫(yī)院,就醫(yī)者可以從自己的手機(jī)終端上獲得自己所處的院內(nèi)位置信息,快速找到自己的就診科室,及時(shí)就醫(yī);在圖書(shū)館,借閱者同樣可以瀏覽手中Android移動(dòng)終端上顯示的位置信息,獲知自己當(dāng)前位置屬于哪類(lèi)圖書(shū)的存放區(qū)。類(lèi)似的室內(nèi)場(chǎng)合還很多,主要的應(yīng)用價(jià)值在于定位用戶(hù)可以獲取自己在室內(nèi)的位置信息,系統(tǒng)可以根據(jù)用戶(hù)當(dāng)前的位置,選擇性推送相關(guān)的基于位置的服務(wù)信息,這樣可以讓定位移動(dòng)終端用戶(hù)獲取較好的基于位置的服務(wù)體驗(yàn)。
3.1總體設(shè)計(jì)
系統(tǒng)擬采用客戶(hù)端/服務(wù)器 (Client/Server,C/S)的軟件架構(gòu)(如圖1)。
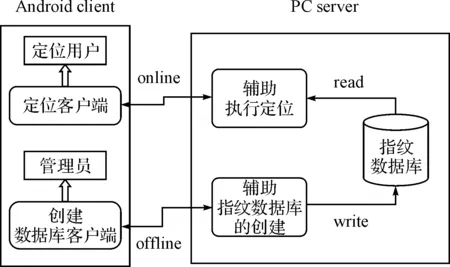
圖1 系統(tǒng)架構(gòu)圖
主要提供基本的靜態(tài)定位功能,這是其他跟蹤導(dǎo)航功能的基礎(chǔ),后續(xù)開(kāi)發(fā)中將實(shí)現(xiàn)針對(duì)動(dòng)態(tài)用戶(hù)的定位導(dǎo)航跟蹤,不同的系統(tǒng)使用者可以在服務(wù)器端的數(shù)據(jù)庫(kù)中添加各種豐富的基于位置的服務(wù)信息,從而提供LBS。
客戶(hù)端和服務(wù)端的開(kāi)發(fā)語(yǔ)言為JAVA。客戶(hù)端是安裝在A(yíng)ndroid系統(tǒng)上的APP應(yīng)用程序,采用Android 主流的開(kāi)發(fā)環(huán)境 Eclipse+ADT+Android SDK,Android應(yīng)用程序是在 Eclipse平臺(tái)上編寫(xiě)的,首先需要在Eclipse上安裝ADT插件,然后指定Android SDK所在的路徑,便可以創(chuàng)建Android虛擬機(jī),進(jìn)行Android應(yīng)用程序的初步調(diào)試。服務(wù)器端同樣以Eclipse作為開(kāi)發(fā)環(huán)境,采用JAVA語(yǔ)言編寫(xiě)實(shí)現(xiàn)。
位置指紋數(shù)據(jù)庫(kù)選用SQLite數(shù)據(jù)庫(kù)。SQLite是一款輕型的數(shù)據(jù)庫(kù),只需要幾百KB的內(nèi)存即可,占用的資源非常少,適用于內(nèi)存不多的嵌入式產(chǎn)品,如智能手機(jī)。SQLite雖然很小巧,但是支持很多SQL語(yǔ)句,例如attach database,begin transaction,create index,create view,select以及update等數(shù)據(jù)庫(kù)操作命令,同時(shí),它也遵守ACID關(guān)系型數(shù)據(jù)庫(kù)管理系統(tǒng)。Android平臺(tái)采用了SQLite的數(shù)據(jù)庫(kù)存儲(chǔ)方式,并且為開(kāi)發(fā)者提供了API。開(kāi)發(fā)者可以通過(guò)創(chuàng)建SQLiteDataHdper的子類(lèi)來(lái)創(chuàng)建自己的SQLiteDatabase實(shí)例。SQLiteDatabase提供了對(duì)數(shù)據(jù)庫(kù)的所有操作,如query,insert,update,delete等。
3.2客戶(hù)端設(shè)計(jì)
系統(tǒng)的客戶(hù)端主要是實(shí)現(xiàn)各種移動(dòng)終端位置導(dǎo)航定位。具體就是具有檢測(cè)和識(shí)別RSSI、發(fā)送RSSI和定位請(qǐng)求、顯示定位結(jié)果的功能。
另外,為了便于離線(xiàn)訓(xùn)練階段指紋數(shù)據(jù)庫(kù)的創(chuàng)建,盡量減少人工統(tǒng)計(jì)記錄的工作,該系統(tǒng)在上述的功能模塊基礎(chǔ)上,設(shè)計(jì)了一個(gè)輔助創(chuàng)建指紋數(shù)據(jù)庫(kù)的另一個(gè)客戶(hù)端,同樣運(yùn)行于A(yíng)ndroid平臺(tái)上,主要供數(shù)據(jù)庫(kù)管理員使用,應(yīng)具有采集位置指紋信息,傳送參考點(diǎn)的RSSI和位置信息到服務(wù)器端的功能;對(duì)應(yīng)地,在服務(wù)器端,需要增加相應(yīng)的功能模塊,配合數(shù)據(jù)庫(kù)創(chuàng)建客戶(hù)端完成指紋數(shù)據(jù)庫(kù)的創(chuàng)建,應(yīng)具有接收參考點(diǎn)位置指紋信息、處理指紋信息、連接數(shù)據(jù)庫(kù)并寫(xiě)入指紋數(shù)據(jù)的功能。
定位客戶(hù)端和創(chuàng)建數(shù)據(jù)庫(kù)客戶(hù)端均是安裝在A(yíng)ndroid平臺(tái)的移動(dòng)終端上,離線(xiàn)建立指紋數(shù)據(jù)庫(kù)時(shí),系統(tǒng)管理員通過(guò)Android手機(jī)內(nèi)置的無(wú)線(xiàn)網(wǎng)卡連接功能連到服務(wù)器所在的網(wǎng)絡(luò),使得客戶(hù)端和服務(wù)器處在同一局域網(wǎng)內(nèi),并按照設(shè)定好的參考點(diǎn)位置在每一個(gè)參考點(diǎn)使用創(chuàng)建數(shù)據(jù)庫(kù)客戶(hù)端采集參考點(diǎn)位置指紋信息,并連同其的位置坐標(biāo)傳送到服務(wù)器端。在線(xiàn)定位時(shí),用戶(hù)啟動(dòng)客戶(hù)端程序后,并發(fā)送一個(gè)定位請(qǐng)求到服務(wù)器,通過(guò)和服務(wù)器之間的socket通信進(jìn)行數(shù)據(jù)傳輸,將能采集到的AP的RSSI通過(guò)socket連接發(fā)送給服務(wù)器,最后接收并顯示服務(wù)器定位出的位置信息。
3.3服務(wù)器端設(shè)計(jì)
系統(tǒng)的服務(wù)器端運(yùn)行于計(jì)算機(jī)上,主要是實(shí)現(xiàn)位置指紋庫(kù)的建立、更新和維護(hù)以及信號(hào)處理和定位算法功能實(shí)現(xiàn)。具體可以描述為接收RSSI信息,處理RSSI信息、連接讀取數(shù)據(jù)庫(kù)、執(zhí)行定位算法、發(fā)送定位結(jié)果的功能。
服務(wù)器主要負(fù)責(zé)輔助離線(xiàn)階段指紋數(shù)據(jù)庫(kù)的創(chuàng)建以及在線(xiàn)定位階段定位的執(zhí)行。開(kāi)啟服務(wù)器后,相應(yīng)會(huì)開(kāi)啟一個(gè)監(jiān)聽(tīng)線(xiàn)程進(jìn)行socket監(jiān)聽(tīng),等待客戶(hù)端的指紋信息傳輸或者定位請(qǐng)求。當(dāng)收到創(chuàng)建數(shù)據(jù)庫(kù)客戶(hù)端的指紋信息時(shí),服務(wù)器要將接收到的指紋信息進(jìn)行處理,再連接數(shù)據(jù)庫(kù)并將相應(yīng)的指紋信息存入其中。當(dāng)收到定位客戶(hù)端的定位請(qǐng)求時(shí),服務(wù)器讀取其中的位置指紋信息,并讀取離線(xiàn)階段創(chuàng)建的指紋數(shù)據(jù)庫(kù)中的指紋信息,執(zhí)行最鄰近定位算法估算出定位客戶(hù)端的當(dāng)前位置,并將結(jié)果返回到定位客戶(hù)端。
3.4位置指紋數(shù)據(jù)庫(kù)的設(shè)計(jì)
位置指紋庫(kù)是實(shí)現(xiàn)定位的基礎(chǔ),系統(tǒng)在位置指紋庫(kù)的建立階段會(huì)產(chǎn)生大量的數(shù)據(jù),怎樣合理的設(shè)計(jì)數(shù)據(jù)庫(kù)才能使系統(tǒng)運(yùn)行效率更高是非常關(guān)鍵的問(wèn)題[13]。本系統(tǒng)釆用的Android平臺(tái)進(jìn)行開(kāi)發(fā),適用于A(yíng)ndroid手機(jī)的應(yīng)用軟件,考慮到手機(jī)的存儲(chǔ)和運(yùn)算能力并不能像計(jì)算機(jī)那樣強(qiáng)大,所以需要通過(guò)設(shè)計(jì)一個(gè)好的數(shù)據(jù)庫(kù)來(lái)節(jié)約手機(jī)的內(nèi)存。Android系統(tǒng)內(nèi)置有一個(gè)輕量級(jí)的數(shù)據(jù)庫(kù)系統(tǒng):SQLite數(shù)據(jù)庫(kù),同時(shí)也提供了管理數(shù)據(jù)庫(kù)的類(lèi)和方法,能夠有效地對(duì)數(shù)據(jù)庫(kù)進(jìn)行管理。
通過(guò)對(duì)待定位區(qū)域進(jìn)行數(shù)據(jù)采集得到位置指紋庫(kù),而后利用位置指紋庫(kù)實(shí)時(shí)的與在線(xiàn)位置指紋信息進(jìn)行匹配實(shí)現(xiàn)定位,所以位置指紋庫(kù)準(zhǔn)確性對(duì)定位精度的影響非常大。
本系統(tǒng)共包含9張數(shù)據(jù)庫(kù)表,用以存儲(chǔ)系統(tǒng)所有產(chǎn)生的數(shù)據(jù),如表1所示。
表DATA_COLLECT_ORIGIN用于保存離線(xiàn)階段數(shù)據(jù)釆集時(shí)重復(fù)多次采集的包含釆集點(diǎn)位置坐標(biāo),AP列表和AP的信號(hào)強(qiáng)度列表。此列表信息如表2。
表DATA_COLLECT_FILTER存儲(chǔ)的是數(shù)據(jù)釆集階段經(jīng)過(guò)處理后的數(shù)據(jù),其結(jié)構(gòu)與表 DATA_COLLECT_ORIGIN 一樣。
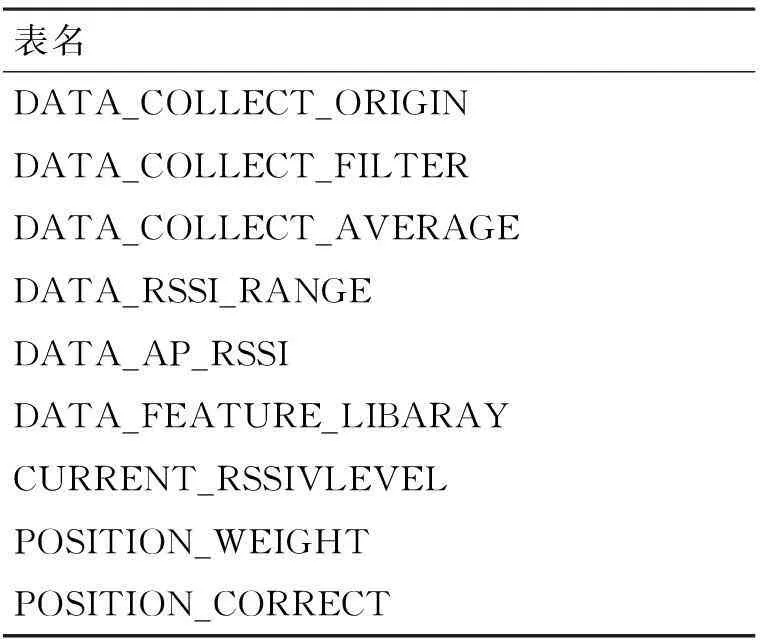
表1 指紋數(shù)據(jù)庫(kù)中涉及的表
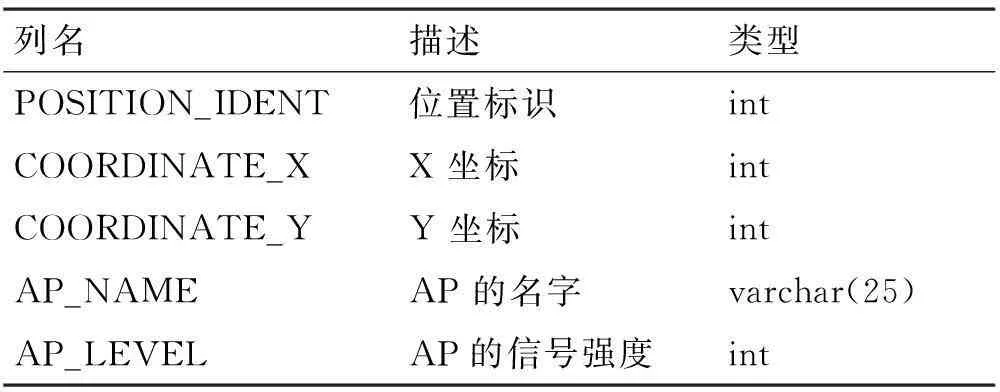
表2 數(shù)據(jù)庫(kù)表DATA_COLLECT_ORIGIN 信息
表DATA_COLLECT_AVERAGE存儲(chǔ)的是對(duì)每個(gè)AP的信號(hào)強(qiáng)度經(jīng)過(guò)求平均之后得到的新數(shù)據(jù),其信息如表3。
表DATA_RSSI_RANGE存儲(chǔ)的是每個(gè)AP的信號(hào)強(qiáng)度變化范圍,其信息如表4。
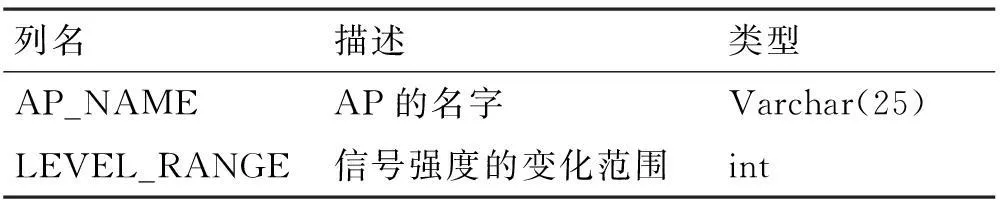
表4 DATA_RSSI_RANGE 表信息
表DATA_AP_RSSI用來(lái)保存數(shù)據(jù)釆集階段釆集到的RSSI數(shù)據(jù),存儲(chǔ)了AP的名字和信號(hào)強(qiáng)度,通過(guò)表5來(lái)描述。
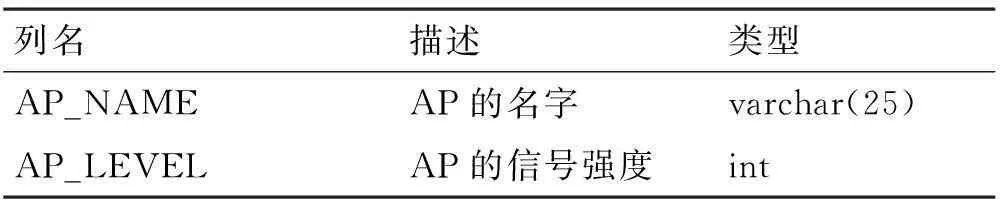
表5 DATA_AP_RSSI 表信息
表DATA_FEATURE_LIBARAY存儲(chǔ)的是特征庫(kù)的信息。
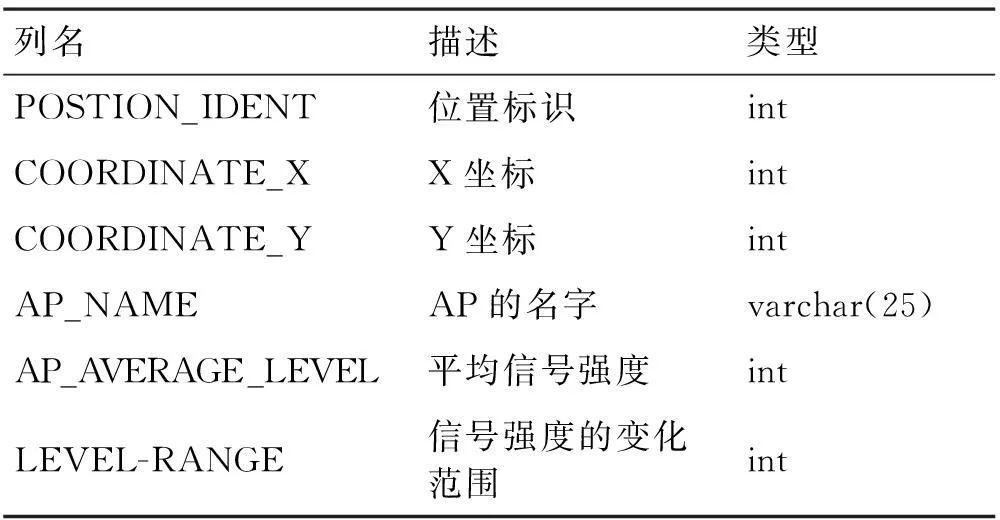
表6 DATA_FEATURE_LIBARAY 表信息
表CURRENT_RSSI_LEVEL用以存儲(chǔ)當(dāng)前實(shí)時(shí)掃描到的AP信息,包括AP的名字和信號(hào)強(qiáng)度。其結(jié)構(gòu)與表DATA_AP_RSSI相同。
表POSITION_WEIGHT用來(lái)存儲(chǔ)匹配后得到的包含權(quán)值和位置信息的數(shù)據(jù),其信息如表7。
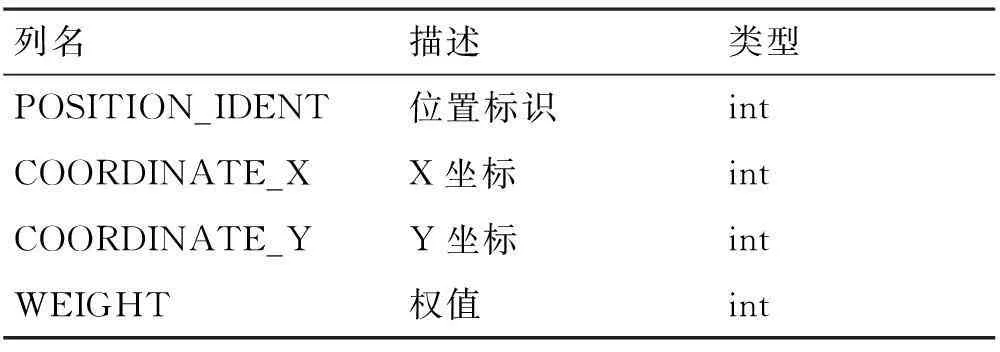
表7 含權(quán)值和位置信息的數(shù)據(jù)表
為了在每一次定位結(jié)束時(shí)對(duì)本次定位結(jié)果進(jìn)行判斷,需要對(duì)每一次定位的結(jié)果進(jìn)行存儲(chǔ),表POSITION_CORRECT存儲(chǔ)的是每一次正確定位后的位置信息,如表8所示為數(shù)據(jù)庫(kù)表POSITION_CORRECT的結(jié)構(gòu)。
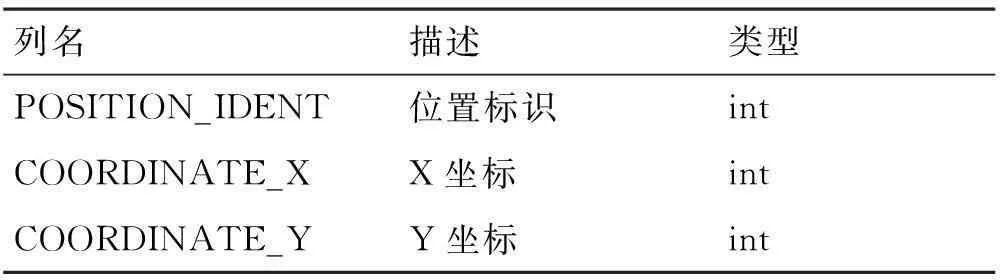
表8 POSITION_CORRECT 表信息
4系統(tǒng)實(shí)現(xiàn)
系統(tǒng)主要由類(lèi)圖中的七個(gè)類(lèi)實(shí)現(xiàn),MainActivity類(lèi)是系統(tǒng)最主要的類(lèi)是系統(tǒng)的入口 ,系統(tǒng)的特征庫(kù)建立功能模塊的實(shí)現(xiàn)就由這個(gè)類(lèi)來(lái)完成。MatchingActivity類(lèi)是定位算法的主體類(lèi),實(shí)現(xiàn)當(dāng)前掃描的數(shù)據(jù)與特征庫(kù)的匹配,計(jì)算目標(biāo)定位坐標(biāo),主要調(diào)用的方法:readData(),writeData(), matchData(),calculateCoordinate()等。類(lèi)圖中的其他類(lèi)主要負(fù)責(zé)系統(tǒng)運(yùn)行過(guò)程巾的數(shù)據(jù)處理,實(shí)現(xiàn)數(shù)據(jù)的交互和存儲(chǔ)等。

圖2 系統(tǒng)類(lèi)圖
5結(jié)語(yǔ)
本文著眼實(shí)際,以基于位置的服務(wù)應(yīng)用為研究背景,以室內(nèi)定位領(lǐng)域的前沿理論成果為理論基礎(chǔ)。采用軟硬件結(jié)合的研究方法,以位置指紋室內(nèi)定位系統(tǒng)的工程實(shí)用化為目標(biāo),探索并設(shè)計(jì)了基于A(yíng)ndroid的位置指紋室內(nèi)定位系統(tǒng),為后續(xù)研究位置指紋室內(nèi)定位算法的優(yōu)化奠定了堅(jiān)實(shí)的基礎(chǔ)。
參 考 文 獻(xiàn)
[1] Garg V,Jhamb M. A Review of Wireless Sensor Network on Locali-zation Techniques[J].International Journal of Engineering Trends and Technology,2013,4(4):1049-1053.
[2] Han G,Xu H,Duong T Q,et al. Localization Algorithms of Wireless Sensor Networks: Survey[J].Telecommunication Systems,2013,52(4):2419-2436.
[3] 馮秀芳,崔秀鋒,祈會(huì)波.無(wú)線(xiàn)傳感器網(wǎng)絡(luò)中基于移動(dòng)錨節(jié)點(diǎn)的APIT 的改進(jìn)定位算法[J].傳感技術(shù)學(xué)報(bào),2011,24(2):269-274.
[4] 溫江濤,范學(xué)敏,吳希軍.基于 RSSI 跳數(shù)修正的DV-Hop改進(jìn)算法[J].傳感技術(shù)學(xué)報(bào),2014,27(1):113-117.
[5] Shin B J,Lee K W, Choi S H, et al. Indoor WiFi positioning system for Android-based smartphone[C]//Proceedings of International Conference on Information and Communication Technology Convergence ICTC′10, 2010.
[6] 揚(yáng)帆,趙東東.基于A(yíng)ndroid平臺(tái)的WiFi定位[J].電子測(cè)量技術(shù),2012,35(9):116-124.
[7] 雷地球,羅海勇,劉曉明.一種基于WiFi的室內(nèi)定位系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)[C]//第六屆和諧人機(jī)環(huán)境聯(lián)合學(xué)術(shù)會(huì)議,2010.
[8] 顧聰.基于A(yíng)ndroid平臺(tái)的室內(nèi)LBS系統(tǒng)的研究與實(shí)現(xiàn)[D].湘潭:湘潭大學(xué)碩士學(xué)位論文,2011.
[9] Le Dortz N, Gain F,Zetterberg P. WiFi fingerprint indoor positioning system using probability distribution comparison[C]//Acoustics, Speech and Signal Processing (ICASSP),2012 IEEE International Conference on. IEEE,2012:2301-2304.
[10] Yongliang Sun, Yubin Xu, Lin Ma, Zhian Deng. KNN-FCM Hybrid Algorithm for Indoor Location in WLAN[C]//International Conference on Power Electronics and Intelligent Transportation System,2009.
[11] Di Wu,Yubin Xu,Lin Ma. Research on RSS based Indoor Location Method[C]//Shenzhen: Pacific-Asia Conference on Knowledge Engineering and Software Engineering,2009:205-208.
[12] Moustafa Youssef, Mohamed Abdallah, Ashok Agrawala. Multivariate Analysis for Probabilistic WLAN Location Determination Systems[C]//The Second Annual International Conference on Mobile and Ubiquitous Systems: Networking and Services,2005:353-362.
[13] Hung-Huan Liu,Yu-Non Yang.WiFi-Based Indoor Positioning for Multi-Floor Enviromnent[C]//Tencon IEEE Region Conference,2011:24(4):597-601.
Study and Design of Indoor Position System with Fingerprint Based on Android Platform
XU WeiZHA FengLI Bao
(Department of Navigation Engineering, Naval University of Engineering, Wuhan430033)
AbstractOn the basis of the research based on RSSI indoor positioning, the paper designs a kind of fingerprint indoor position system based on Android platform.The system is divided into two parts, including positioning the customer terminal and positioning server. It mainly applies to position for indoor people. Different users can add kinds of information to the system in order to provide the server based on location.
Key Wordsreceived signal strength indication, fingerprint, indoor position system
* 收稿日期:2015年11月3日,修回日期:2015年12月27日
基金項(xiàng)目:海軍工程大學(xué)青年自然科學(xué)基金(編號(hào):HGDQNJJ15006,HGDQNJJ15020);國(guó)家自然科學(xué)基金(編號(hào):61503404);航空科學(xué)基金(編號(hào):20150816002)資助。
作者簡(jiǎn)介:許微,女,碩士,講師,研究方向:衛(wèi)星導(dǎo)航、室內(nèi)定位和重力匹配導(dǎo)航。查峰,男,博士,講師,研究方向:慣性技術(shù)及應(yīng)用。李豹,男,博士,講師,研究方向:衛(wèi)星導(dǎo)航技術(shù)及應(yīng)用。
中圖分類(lèi)號(hào)U666.1
DOI:10.3969/j.issn.1672-9730.2016.05.013
