基于圖論的變形移動(dòng)機(jī)器人姿態(tài)變換策略
2016-06-21 07:02:36山東科技大學(xué)
電子世界 2016年11期
山東科技大學(xué) 呂 鵬 劉 浩
基于圖論的變形移動(dòng)機(jī)器人姿態(tài)變換策略
山東科技大學(xué) 呂 鵬 劉 浩
【摘要】針對(duì)很多地形復(fù)雜的應(yīng)用場(chǎng)合,變形移動(dòng)機(jī)器人[1]的研究越來越多,但目前針對(duì)其姿態(tài)變形問題仍沒有一種常規(guī)有效的方法來實(shí)現(xiàn),本文采用圖論方法來實(shí)現(xiàn)變形移動(dòng)機(jī)器人姿態(tài)的變換。通過實(shí)際實(shí)驗(yàn)驗(yàn)證了該算法可以有效的解決變形移動(dòng)機(jī)器人的姿態(tài)變換問題。
【關(guān)鍵詞】變形移動(dòng)機(jī)器人;姿態(tài)變換;圖論
0 前言
目前,移動(dòng)機(jī)器人在所有機(jī)器人的研究中占有舉足輕重的地位,而使其適應(yīng)大多數(shù)復(fù)雜地面環(huán)境又是移動(dòng)機(jī)器人研究中的一大挑戰(zhàn),尤其是室外移動(dòng)機(jī)器人,比如排爆機(jī)器人,對(duì)復(fù)雜環(huán)境的適應(yīng)能力就是其一個(gè)技術(shù)指標(biāo)。
本文研究的移動(dòng)變形機(jī)器人方案示意圖如圖1所示。該移動(dòng)機(jī)器人有四條履帶。

圖1 結(jié)構(gòu)原理
每條履帶都通過一加長臂和兩個(gè)關(guān)節(jié)和機(jī)器人主體相聯(lián)。通過它們,每一條履帶都可以實(shí)現(xiàn)任意角度或方向的伸展、折疊或旋轉(zhuǎn)。通過這些履帶、關(guān)節(jié)和加長臂的不同的組合方式,就可以獲得機(jī)器人不同的移動(dòng)姿態(tài)和移動(dòng)方式,以適應(yīng)不同地面情況的運(yùn)動(dòng)。
1 圖論算法
將變形移動(dòng)機(jī)器人各個(gè)姿態(tài)作為圖的頂點(diǎn),姿態(tài)之間的變換作為路徑,那么任意姿態(tài)之間的變換就變成了圖論中的最短路徑的求解問題。
1.1 姿態(tài)變換圖的確立
1.1.1 建立圖頂點(diǎn)與姿態(tài)的對(duì)應(yīng)關(guān)系表
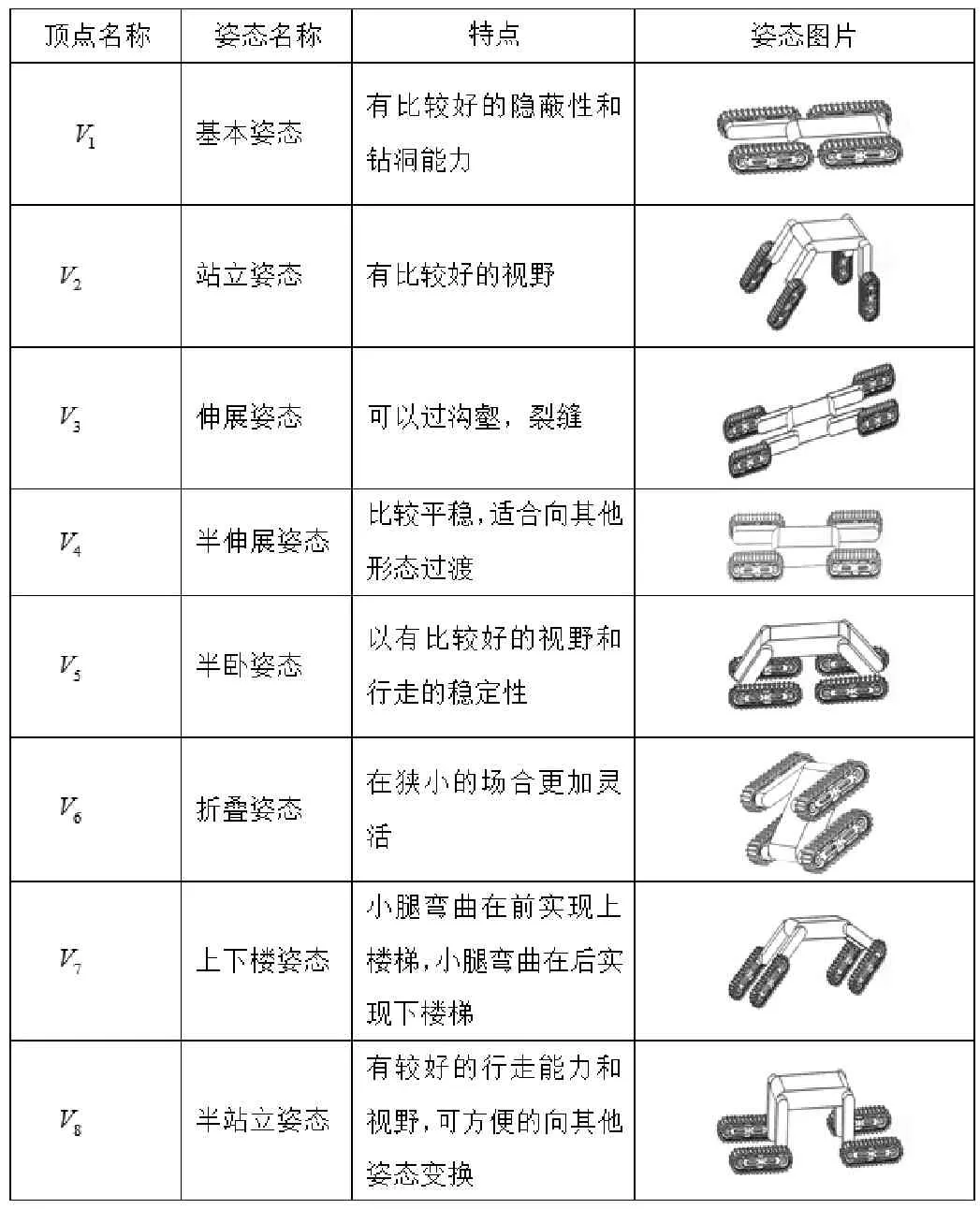
表1 頂點(diǎn)與姿態(tài)關(guān)系表
由表1可見,同時(shí)考慮布線可以得出,有些姿態(tài)之間的變換相對(duì)容易,有些姿態(tài)之間的變換相對(duì)復(fù)雜,或者說需要通過另一些姿態(tài)作為中間過程,那么,假定要實(shí)現(xiàn)姿態(tài)A到姿態(tài)B之間的變換,就需要獲取從姿態(tài)A到姿態(tài)B最簡單的變換方式,也就是說要電機(jī)的轉(zhuǎn)動(dòng)幅度要小,同時(shí)保證重心的偏移要小,從而達(dá)到機(jī)器人姿態(tài)變換的速度快,同時(shí)具有整個(gè)機(jī)身穩(wěn)定的效果。
1.1.2 確定權(quán)值

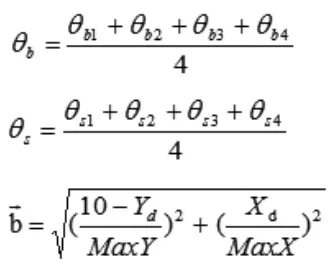
同理,小腿關(guān)節(jié)平均運(yùn)動(dòng)角度為:

再然后根據(jù)經(jīng)驗(yàn)確定各變量在權(quán)值中所占的比重,最后為了使計(jì)算機(jī)可以準(zhǔn)確快速的處理數(shù)據(jù),故將計(jì)算出的權(quán)值放大100倍,使其處于合理的整數(shù)范圍內(nèi)。
從而可以確定權(quán)值計(jì)算公式:

其中:
通過編寫計(jì)算工具,可得到所有的權(quán)值,如圖2所示:
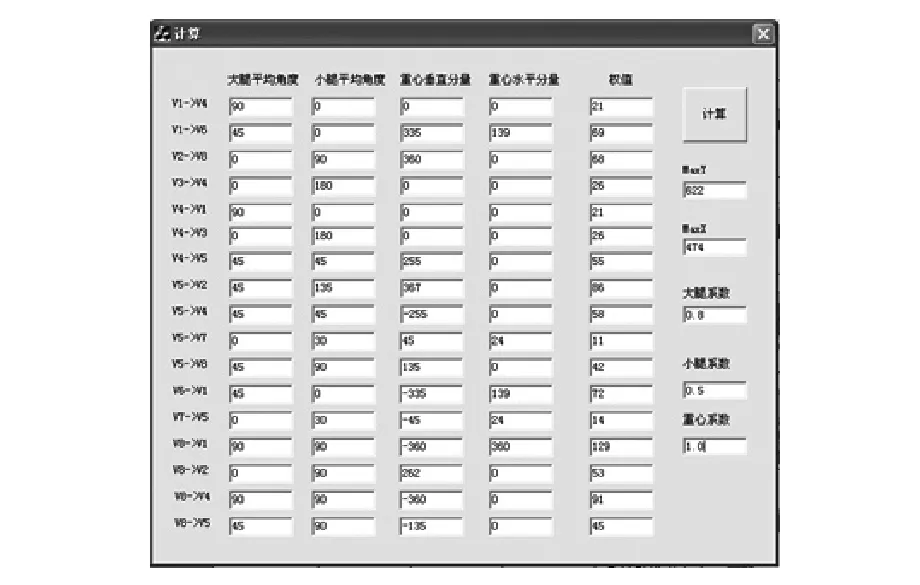
圖2 權(quán)值計(jì)算
1.1.3 建立姿態(tài)變換圖及其矩陣
基于以上考慮,建立整個(gè)姿態(tài)變換圖,如圖3所示:
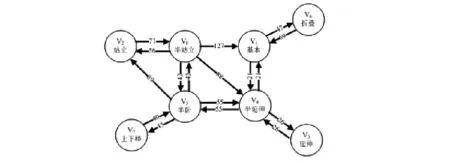
圖3 姿態(tài)變換圖
由上圖建立變換復(fù)雜度矩陣如下:
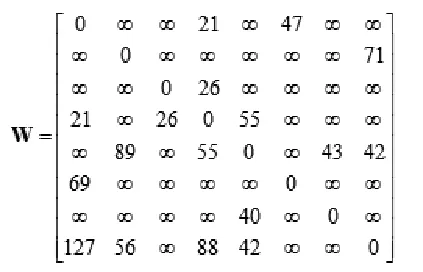
1.2 應(yīng)用Dijkstra算法求解

(1)初始化頂點(diǎn),將頂點(diǎn)與姿態(tài)變化函數(shù)關(guān)聯(lián),建立如下結(jié)構(gòu)體:
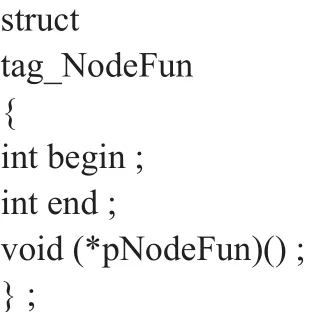
其中,begin表示起始頂點(diǎn),end表示結(jié)束頂點(diǎn),pNodeFun指向由姿態(tài)begin到姿態(tài)end的變換函數(shù)。
(3)從V-S集合中,選取姿態(tài)變換最佳的姿態(tài)即頂點(diǎn)Va,并將頂點(diǎn)Va加入到S中。


(5)若S集合同V集合相等,則已找到最佳變換方式,否則返回第(2)步。
(6)調(diào)用姿態(tài)變換函數(shù)執(zhí)行姿態(tài)變換。
具體程序流程圖如圖3所示:
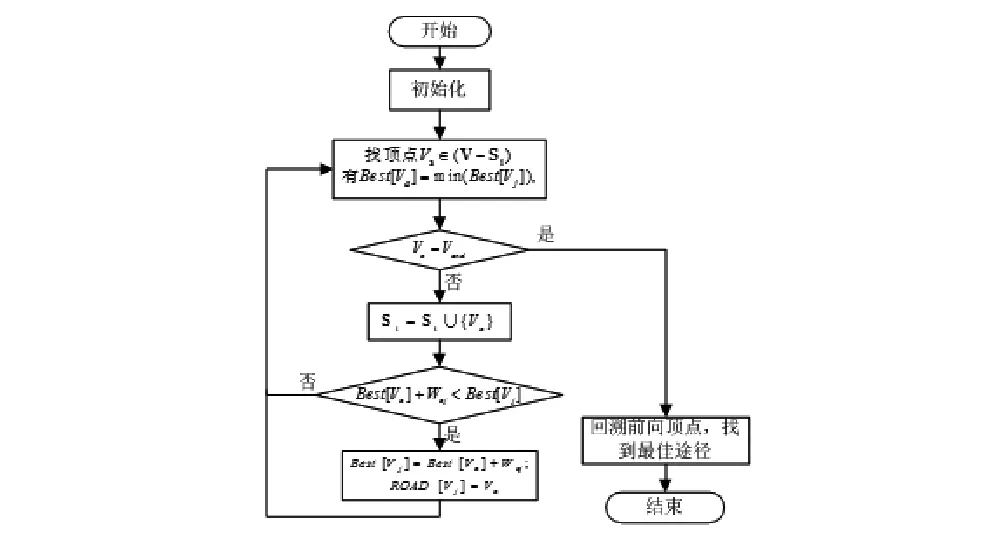
圖3 程序流程圖
2 實(shí)驗(yàn)
2.1 仿真實(shí)驗(yàn)
為了驗(yàn)證上面的算法,在PC機(jī)上進(jìn)行仿真,假設(shè)從V1(頂點(diǎn)0)到V5(頂點(diǎn)4),輸出結(jié)果如圖4所示:

圖4 輸出結(jié)果圖
可以看出由頂點(diǎn)0到頂點(diǎn)1,權(quán)值之和為162,變換的姿態(tài)順序?yàn)閂1(0)->V4(3)->V5(4)->V2(1),而其他的變換的權(quán)值都會(huì)大于162,比如變換V1(0)->V4(3)->V5(4)->V8(7)->V2(1)的權(quán)值之和為171。調(diào)用的姿態(tài)變換函數(shù)分別為one_four(),four_five()以及five_two(),從而可以實(shí)現(xiàn)整個(gè)姿態(tài)的變換。
2.2 具體實(shí)驗(yàn)仿真
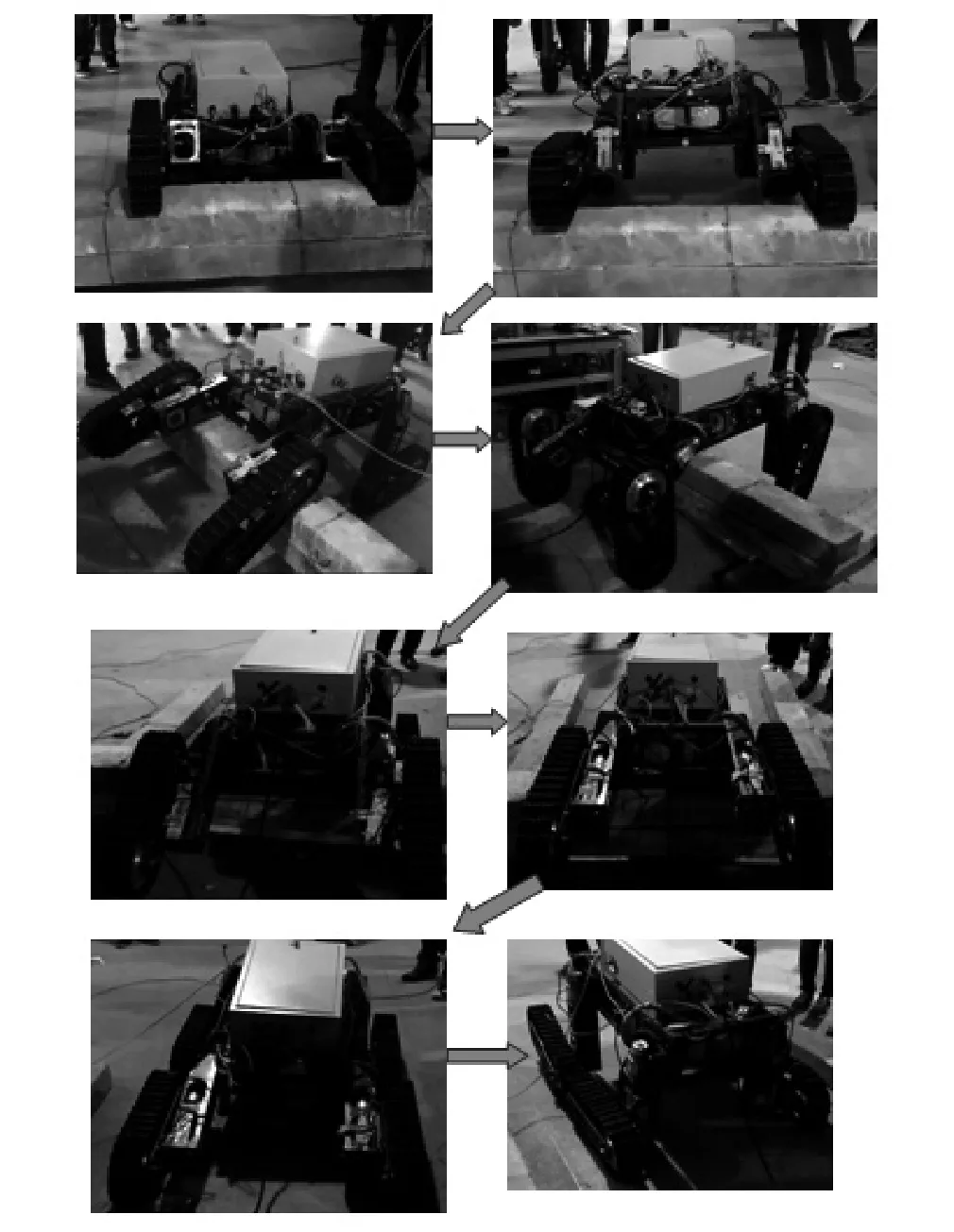
圖5 實(shí)驗(yàn)仿真圖
3 結(jié)論
本文利用圖論方法實(shí)現(xiàn)了變形移動(dòng)機(jī)器人的姿態(tài)變換,通過實(shí)驗(yàn)證明的此方法可以有效的解決姿態(tài)變換最優(yōu)問題,并且實(shí)現(xiàn)簡單,具有很好的實(shí)用價(jià)值。
參考文獻(xiàn)
[1]張衛(wèi)鋒,樊炳輝等.新型變形移動(dòng)機(jī)器人結(jié)構(gòu)設(shè)計(jì)和分析[J].現(xiàn)代機(jī)械,2006(5)∶6-67.
[2]熊有倫.機(jī)器人學(xué)[M].北京∶機(jī)械工業(yè)出版社,1993∶54-55.
[3]馬金猛,李小凡等.地面移動(dòng)機(jī)器人越障動(dòng)力學(xué)建模與分析[J].機(jī)器人,2008(3)∶ 273-278.
[4]范路橋,姚錫凡等.排爆機(jī)器人的研究現(xiàn)狀及其關(guān)鍵技術(shù)[J].機(jī)床與液壓,2008(6)∶139-143.
作者簡介:
呂鵬(1990—),男,山東臨沂人,碩士研究生,主要從事機(jī)器人技術(shù)的研究。