傾轉旋翼機短艙傾轉機構動力學仿真分析
2016-06-23 03:29:32王惟棟龐華華王斌團
航空工程進展 2016年2期
關鍵詞:仿真
王惟棟,龐華華,王斌團
(中國航空工業集團公司 第一飛機設計研究院,西安 710089)
傾轉旋翼機短艙傾轉機構動力學仿真分析
王惟棟,龐華華,王斌團
(中國航空工業集團公司 第一飛機設計研究院,西安710089)
摘要:研究傾轉旋翼機短艙傾轉機構在短艙從固定翼模式運動到直升機模式過程中的動力學特性具有重要的意義。在短艙傾轉機構傳力分析及運動學分析的基礎上,應用LMS Motion建立了短艙傾轉機構多體動力學仿真模型,定義短艙傾轉機構的各構件及其屬性,創建各構件之間的運動副,定義運動機構驅動,創建外力和力矩以模擬真實的工況,得到并分析短艙和絲杠的主要運動參數曲線以及機構主交點的受力變化情況。結果表明:絲杠與短艙連接點處作用力隨短艙的仰角增大先減小再增大,短艙與機翼支點處作用力隨著短艙的仰角增大而逐漸增大。研究結果可為傾轉旋翼機短艙傾轉機構的參數確定提供參考。
關鍵詞:傾轉旋翼;傾轉機構;多體動力學;短艙;絲杠;仿真
0引言
傾轉旋翼機是一種將直升機技術與固定翼飛機技術融為一體的新型飛行器,既具備常規直升機垂直起降和空中懸停能力,又具備螺旋槳固定翼飛機高速巡航飛行的能力,可在兩種模式間自由轉換。傾轉旋翼機具有對場地要求低、飛行模式多、巡航速度快、航程遠、機動性好等一系列優點[1]。
針對傾轉旋翼機設計技術,國外已開展了多年的理論和試驗研究[2-5]。在試驗研究方面,開展了大量的縮比模型風洞試驗,并且進行了全尺寸試驗和飛行試驗,構建了詳實的試驗數據庫[6-7];在理論研究方面,通過改進直升機氣動設計方法,并發展計算流體力學(CFD)等先進設計分析方法,用于計算和分析傾轉旋翼機的氣動性能和氣動干擾等問題[8-9]。
國內在傾轉旋翼飛機技術領域的研究起步較晚,技術儲備相對薄弱。吳希明等[10]、薛立鵬等[11]和沙虹偉等[12]對傾轉旋翼飛行器的氣動特性開展了探索性的試驗研究。曹蕓蕓等[13]提出了一種確定傾轉旋翼飛行器從直升機模式向固定翼飛機模式過渡的發動機短艙傾轉角度-速度包線分析方法。繆君等[14]建立了傾轉旋翼機傳動系統的動力學模型,對傾轉旋翼機傳動系統的壽命進行了計算,獲得了系統在動載荷條件下的壽命值。 吉國明等[15]采用MATLAB和LMS軟件對比分析了傾轉旋翼機短艙傾轉機構的運動學特征。
國內外相關研究對短艙傾轉機構在短艙從固定翼模式運動到直升機模式過程中的動力學特性鮮有報道,而機構在短艙傾轉過程中的動力學特性對機構設計參數的確定具有重要的參考價值。
本文在對傾轉旋翼機短艙傾轉機構傳力分析及運動學分析的基礎上,在LMS Motion中建立短艙傾轉機構多體動力學仿真模型,得到并分析短艙和絲杠的主要運動參數曲線以及機構主交點的受力變化情況,獲得傾轉旋翼機短艙傾轉機構在短艙從固定翼模式運動到直升機模式過程中的動力學特性,以期為傾轉旋翼機短艙傾轉機構的參數確定提供參考。
1傾轉機構設計方案介紹
傾轉旋翼機短艙傾轉機構方案如圖1所示,用于驅動傾轉旋翼飛機的機翼左右短艙,使傾轉旋翼飛機在固定翼飛機飛行模式和直升機飛行模式之間轉換。傾轉機構驅動裝置的收縮極限位置和伸出極限位置,分別對應傾轉旋翼飛機的固定翼飛行模式和直升機飛行模式。采用雙余度嵌套式滾珠絲杠方案,絲杠的上端與短艙通過球鉸連接,絲杠螺母的下端通過球鉸與機翼相連。液壓馬達驅動絲杠螺母旋轉,伸縮式滾珠絲杠是兩個嵌套的滾珠絲杠,單個絲杠失效,另一個仍可提供一半傾轉行程,確保旋翼位置能夠安全著陸。
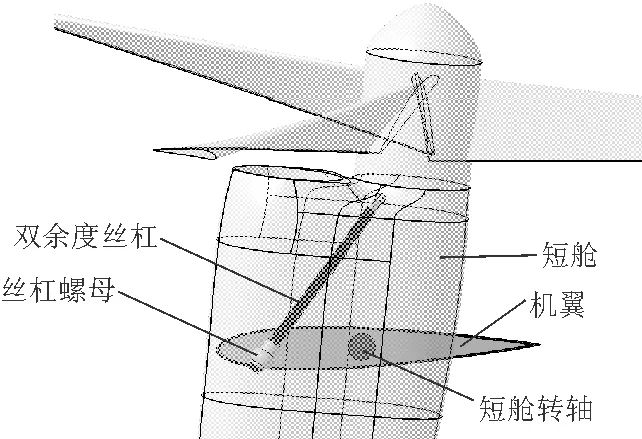
圖1 短艙傾轉機構示意圖
2短艙傳力分析
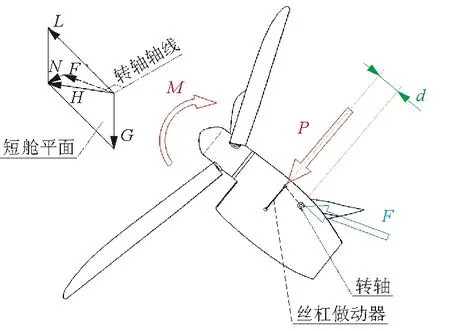
短艙上的載荷主要有螺旋槳拉力和自身重力,其傳力示意圖如圖2所示。
(a) 側視圖
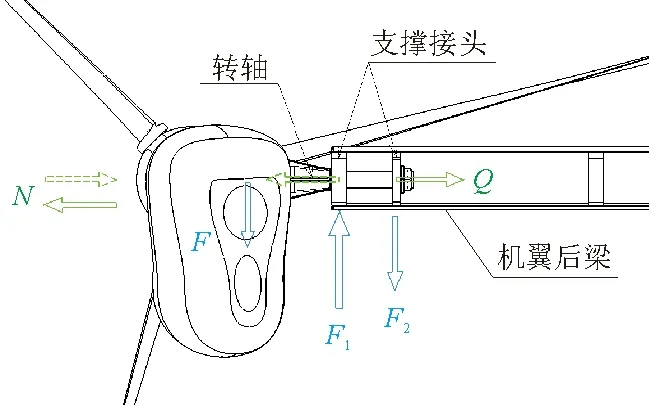
(b) 后視圖
螺旋槳拉力L和自身重力G的合力為H,短艙平面不垂直于轉軸軸線,故合力H在垂直于轉軸平面內的分力為F,在平行于轉軸軸線方向的分力為N(側向力)。分力F通過短艙轉軸以雙支點梁的形式傳遞到機翼后梁,由支反力F1和F2平衡。側向力N通過轉軸支撐接頭提供支反力Q平衡,當側向力向外時,由內側支撐接頭提供支反力平衡(實線箭頭表示);當側向力向內時,由外側支撐接頭提供支反力平衡(虛線箭頭表示)。螺旋槳拉力L和短艙轉矩M由絲杠做動器提供拉力P而產生反方向的轉矩來平衡。
3傾轉機構動力學分析
3.1傾轉機構運動原理
傾轉機構可抽象為曲柄搖塊連桿機構模型,如圖3所示。AB桿為發動機短艙,AD桿為滾珠絲杠,點C為搖塊與絲杠連接點,BC桿對應機翼與短艙連接點連線。AC桿的運動方式為搖塊內所裝套筒旋轉驅動滾珠絲杠AD往返運動,通過A處鉸接帶動發動機安裝架AB旋轉,從而使發動機短艙產生傾轉運動。圖中:θ角為發動機短艙的傾轉角;α角為起始位置時機翼與發動機短艙之間的夾角;φ角為絲杠的擺動角。
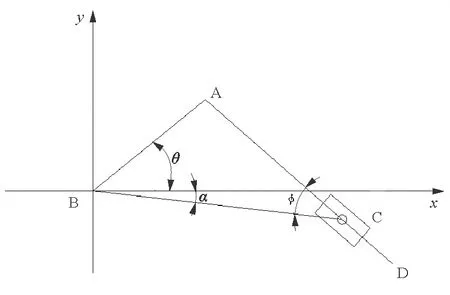
圖3 傾轉機構簡圖
依據曲柄搖塊連桿機構模型的幾何特征,建立以下方程:
沿x軸方向
LACcos(φ+α)=LBCcosα-LABcosθ
(1)
沿y軸方向
LACsin(φ+α)=LABsinθ+LBCsinα
(2)
滾珠絲杠桿長AC
LAC=
(3)
絲杠擺動角φ的正切函數
(4)
得φ角函數

(5)
式中:LAC為主動件,其長度的改變引起θ角及絲杠擺動角φ的變化;LAB、LBC及α角在模型確定的前提下均為定值;LAD在AB桿運動至極限位置時應大于等于AC桿長度,可作為約束,亦可討論其點D產生的包絡線方程。
3.2機構動力學建模
在LMS Motion中建立傾轉旋翼機短艙傾轉機構剛體動力學仿真模型,機構動力學仿真流程如圖4所示。
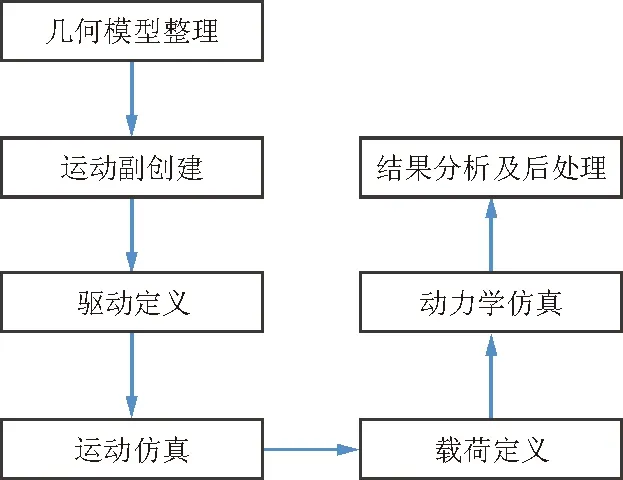
圖4 機構動力學仿真一般流程
LMS Motion模塊可以導入CATIA模型裝配、定義運動機構,也可導入已裝配好或已定義運動機制的CATIA模型。在LMS Motion模塊中對CATIA模型定義運動副和動力學分析,必須將CATIA模型轉化為Body才能識別,進行幾何模型整理。
運動副的定義應真實反映運動機構本身實際情況。在LMS Motion界面通過建模工具建立運動副(Joint),該模型共創建了7個運動副,分別為1個固定副、2個螺旋副、1個圓柱副和3個旋轉副。
定義驅動約束應根據運動真實驅動情況,把實際運動的主動部件的運動定義為驅動約束。整套運動機構有一個驅動,為運動副速度驅動,創建驅動的運動副為絲杠螺母和搖塊套筒之間的旋轉副,類型(Type)選擇為“REL.ANGLE”,即按照給定規律變化。
定義完畢運動副和驅動約束,即可進行運動機構的運動模擬(Kinematic Analysis),以檢驗機構運動軌跡和驅動是否準確、符合實際。
通過運動模擬驗證機構運動副和驅動定義正確后,即可定義載荷,創建外力和力矩以模擬真實的工況。設螺旋槳載荷L作用于槳轂中心,轉矩為M。坐標系原點位于槳轂中心,z軸指向旋翼上方,x軸指向來流方向,y軸滿足右手定則,如圖5所示。
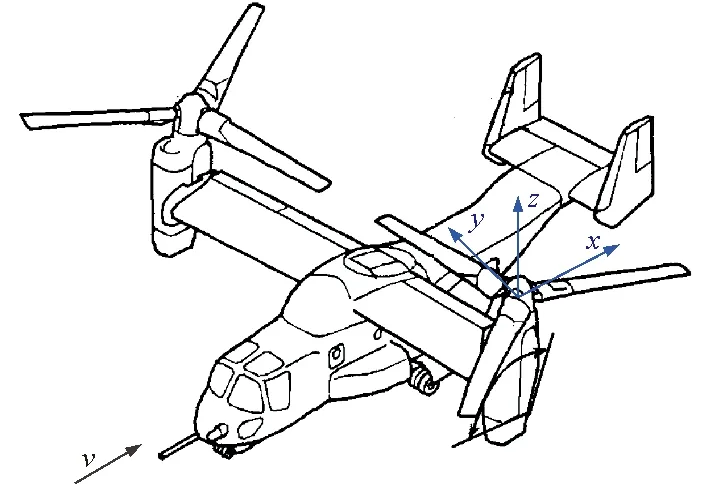
圖5 載荷坐標
定義完畢載荷,即可進行運動機構的動力學仿真(Dynamic Analysis),進行結果和數據后處理。
3.3仿真結果分析
由LMS Motion后處理得到并分析短艙和絲杠的主要運動參數曲線以及機構主交點的受力情況。
短艙的角度隨時間變化的曲線,以及短艙轉動的角速度、角加速度的變化情況,如圖6~圖7所示。
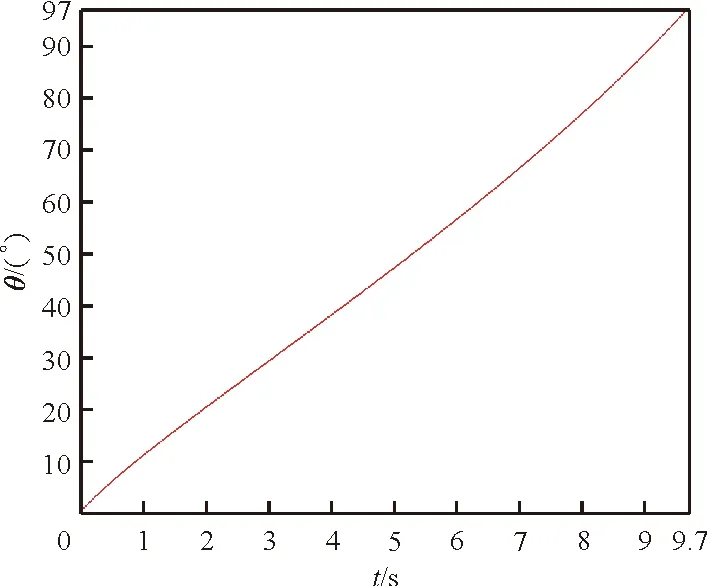
圖6 短艙轉動角度曲線
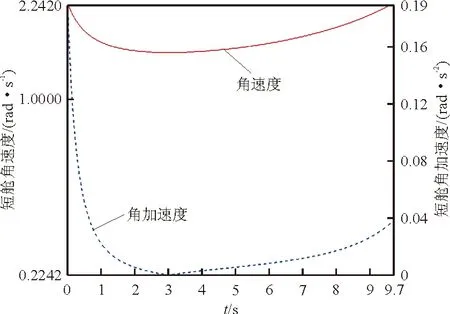
圖7 短艙角速度和角加速度曲線
從圖6可以看出:短艙從固定翼模式運動到直升機模式的角度變化范圍為0°~97°,所需時間為9.7 s;該曲線斜率變化較小,即短艙轉動的角加速度變化較小。
從圖7可以看出:0~3 s內角速度變化較快,3~9.7 s內角速度增加緩慢。在絲杠勻速伸長的過程中,短艙轉動角速度變化快慢與各構件之間角度有關。
短艙是由絲杠推動傾轉,絲杠行程曲線如圖8所示。絲桿的螺距沿軸向均勻,頭數一定,套筒與絲杠螺母相對轉速一定,所以絲桿的伸長為勻速運動,速度約為40 mm/s。
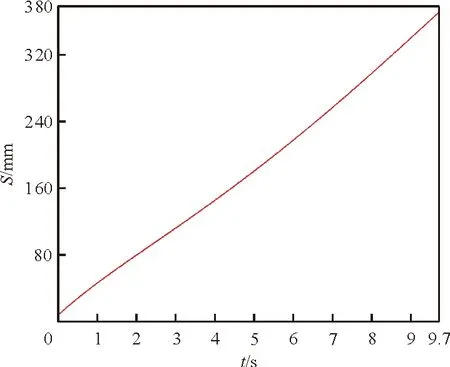
圖8 絲杠行程曲線
絲杠與短艙連接點處作用力曲線如圖9所示。
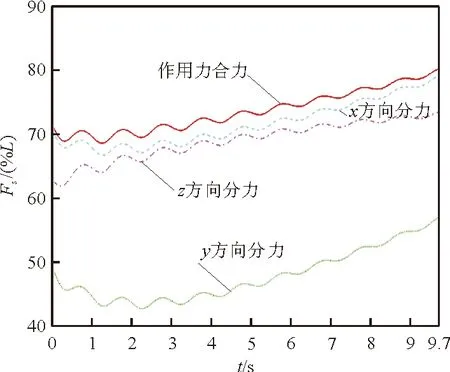
圖9 絲杠與短艙連接點處作用力
從圖9可以看出:當短艙處于固定翼模式時作用力Fs約為71.1%L,隨著短艙的仰角增大先減小至68.5%L再逐漸增大,且絲杠上力值波動幅度隨短艙的仰角增大逐漸減小;當短艙傾轉為直升機模式時,作用力最大為80.1%L;各方向分力變化趨勢基本相同。
對于發動機短艙,它與機翼用轉軸連接,并繞轉軸轉動。短艙與機翼支點處作用力如圖10所示。
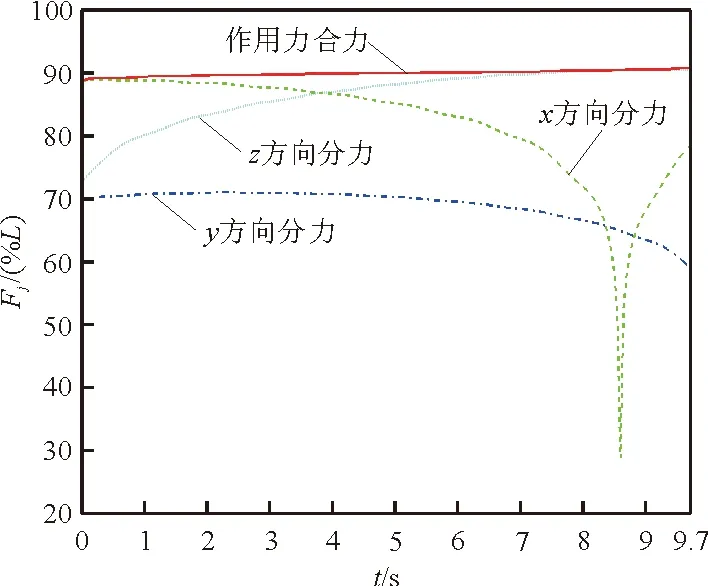
圖10 短艙與機翼支點處作用力
從圖10可以看出:當短艙處于固定翼模式時,作用力Fj約為88.6%L,隨著短艙的仰角增大而逐漸增大;當短艙傾轉為直升機模式時,作用力最大為90.6%L;x方向分力先隨短艙的仰角增大而減小,在8.6 s時發生反轉隨短艙的仰角增大而增大;y方向分力隨短艙的仰角增大而逐漸減小;z方向分力隨著短艙的仰角增大而逐漸增大。
根據動力學仿真結果確定絲杠承載性能,然后試制試驗件,將短艙運動時間試驗數據與仿真結果進行對比,如表1所示。
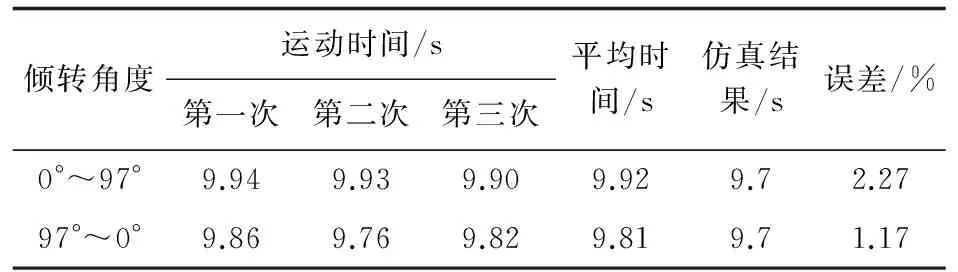
表1 短艙運動時間結果對比
從表1可以看出:短艙0°~97°及97°~0°運動時間均不大于10 s,與仿真分析結果對比誤差均在2.3%以內,驗證了仿真結果的準確性;試驗實測時間略大于仿真結果,主要是實際試驗中影響因素較多,例如機構誤差、摩擦力、液壓系統及傳感器的滯后等。
4結論
(1) 在對傾轉旋翼機短艙傾轉機構傳力分析及運動學分析的基礎上,在LMS Motion中定義短艙傾轉機構的各構件及其屬性,創建各構件之間的運動副,定義運動機構驅動,創建外力和力矩以模擬真實的工況,建立了短艙傾轉機構多體動力學仿真模型。
(2) 通過動力學仿真分析得到了短艙和絲杠的主要運動參數曲線以及機構主交點的受力變化情況,絲杠與短艙連接點處作用力隨短艙的仰角增大先減小再增大且絲杠上力值波動幅度隨短艙的仰角增大逐漸減小,短艙與機翼支點處作用力隨著短艙的仰角增大而逐漸增大。研究結果可為傾轉旋翼機短艙傾轉機構的參數確定提供參考。
參考文獻
[1] Harendra P B, Joglekar M J, Gaffey T M, et al. A mathematical model for real time flight simulation of the Bell model 301 tilt rotor research aircraft[C]. NASA-CR-114614, 1973.
[2] Laurel G S. Development of the XV-15 tilt rotor research aircraft. AHS National Specialists’ meeting on Tactical V/STOL Aircraft[C]. New Bern, North Carolina: AHS, 1989.
[3] David R S. Advanced civil tilt rotor design optimization and issues[C]. 49th American Helicopter Society Forum, St. Louis: AHS, 1993.
[4] Trept T. Aerodynamic design of the BA609 civil tilt rotor[C]. The Tiltrotor/Runway Independent Aircraft Technology and Applications Specialists’ Meeting of the American Helicopter Society, Arlington, Texas: AHS, 2001.
[5] Yeo H, Johnson W. Performance and design investigation of heavy lift tilt rotor with aerodynamic interference effects[C]. 63rd American Helicopter Society Forum, Virginia Beach, VA: AHS, 2007.
[6] Droandi G, Gibertini G, Biava M. Wing-rotor aerodynamic interaction in tiltrotor aircraft[C]. 38th European rotorcraft forum 2012, Amsterdam, Netherlands: AHS, 2012.
[7] Michael J Duffy, John Liu, Michael A McVeigh. Aerodynamic design of nacelle-mounted sails for flight test demonstration on the V-22 osprey tiltrotor[C]. 50th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition 2012, Nashville, TN: AHS, 2012.
[8] Julia A Cole, Mark D Maughmer, Goetz Bramesfeld. Aerodynamic design considerations for tiltrotor wing extensions and winglets[C]. 51st AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition 2013, Grapevine, TX: AHS, 2013.
[9] Mattia Mattaboni, Pierangelo Masarati, Giuseppe Quaranta, et al. Multibody simulation of integrated tiltrotor flight mechanics, aeroelasticity, and control[J]. Journal of Guidance, Control, and Dynamics, 2012, 35(5): 1391-1405.
[10] 吳希明, 仲唯貴, 陳平劍. 傾轉旋翼機氣動設計技術[J]. 航空科學技術, 2012(4): 17-24.
Wu Ximing, Zhong Weigui, Chen Pingjian. Aerodynamic design technology for tilt rotor aircraft[J]. Aeronautical Science & Technology, 2012(4): 17-24.(in Chinese)
[11] 薛立鵬, 張呈林. 傾轉旋翼氣動優化設計[J]. 空氣動力學學報, 2011, 29(4): 453-458.
Xue Lipeng, Zhang Chenglin. The aerodynamic optimization design to tilt-rotor[J]. Acta Aerodynamica Sinica, 2011, 29(4): 453-458.(in Chinese)
[12] 沙虹偉, 陳仁良. 傾轉旋翼機飛行力學特性[J]. 航空動力學報, 2012, 27(4): 749-754.
Sha Hongwei, Chen Renliang. Flight dynamics characteristic of tilt rotor aircraft[J]. Journal of Aerospace Power, 2012, 27(4): 749-754.(in Chinese)
[13] 曹蕓蕓, 陳仁良. 傾轉旋翼飛行器發動機短艙傾轉角度-速度包線分析[J]. 航空動力學報, 2011, 26(10): 2174-2180.
Cao Yunyun, Chen Renliang. Investigation on nacelle conversion envelope analysis method of tiltrotor aircraft[J]. Journal of Aerospace Power, 2011, 26(10): 2174-2180.(in Chinese)
[14] 繆君, 王三民, 楊振, 等. 基于動力學分析的傾轉旋翼機傳動系統壽命計算[J]. 機械與電子, 2008(2): 3-6.
Miao Jun, Wang Sanmin, Yang Zhen, et al. Life prediction of tilt-rotor’s transmission based on its dynamic response[J]. Machinery & Electronics, 2008(2): 3-6.(in Chinese)
[15] 吉國明, 鄭配云, 鄧茅菁, 等. 傾轉旋翼機轉動機構運動學仿真分析[J]. 航空工程進展, 2015, 6(4):452-459.
Ji Guoming, Zheng Peiyun, Deng Maojing, et al. Kinematic simulation and analysis of tiltrotor rotating mechanis[J]. Advances in Aeronautical Science and Engineering, 2015,6(4): 452-459.(in Chinese)
Dynamics Simulation Analysis of Tiltrotor Aircraft Nacelle Tilt Mechanism
Wang Weidong, Pang Huahua, Wang Bintuan
(The First Aircraft Design and Research Institute, Aviation Industry Corporation of China, Xi’an 710089, China)
Abstract:It is of significant importance to study the dynamic performance of tiltrotor aircraft nacelle tilting mechanism during nacelle turning from wing aircraft model to helicopter model. Based on the force and kinematic analysis of nacelle tilting mechanism, the nacelle tilting mechanism multi-body dynamic simulation model is established on the LMS Motion software platform, every component of nacelle tilting mechanism and its property are defined, joints between the components are created, motion drives are defined, external forces and torques to simulate real working condition are created, to obtain and analyze the major kinematic parameter curves of nacelle and the interaction forces between nacelle and screw shaft. The results indicate that, with the increase of nacelle rotation angle, the interaction force between nacelle and screw shaft decreases and then increases, the interaction force between nacelle and wing increases. The results could provide the reference for determining the parameters of tiltrotor aircraft nacelle tilt mechanism.
Key words:tiltrotor; tilt mechanism; multi-body dynamics; nacelle; screw shaft; simulation
收稿日期:2016-03-02;修回日期:2016-04-24
通信作者:王惟棟,yourswwd@163.com
文章編號:1674-8190(2016)02-235-06
中圖分類號:V235
文獻標識碼:A
DOI:10.16615/j.cnki.1674-8190.2016.02.015
作者簡介:
王惟棟(1981-),男,高級工程師。主要研究方向:飛機結構機構設計。
龐華華(1982-),男,高級工程師。主要研究方向:飛機結構設計。
王斌團(1965-),男,研究員。主要研究方向:飛機結構強度。
(編輯:趙毓梅)
猜你喜歡
中國教育技術裝備(2016年20期)2016-12-12 10:09:15
中小企業管理與科技·下旬刊(2016年10期)2016-11-18 20:57:34
科技資訊(2016年18期)2016-11-15 20:09:22
科技資訊(2016年18期)2016-11-15 07:55:28
價值工程(2016年29期)2016-11-14 02:01:16
電子技術與軟件工程(2016年18期)2016-11-14 00:46:54
數字技術與應用(2016年9期)2016-11-09 23:25:33
數字技術與應用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49