基于短距離無線通信技術的船用鍋爐液位輔助監測系統的設計與實現
2016-06-23 13:28:20董良雄李衛強
中國修船 2016年1期
李 強,董良雄,李衛強
(浙江海洋學院,浙江 舟山 316000)
基于短距離無線通信技術的船用鍋爐液位輔助監測系統的設計與實現
李 強,董良雄,李衛強
(浙江海洋學院,浙江 舟山 316000)
文章對于船用鍋爐用汽量增大時出現的高、低位液位傳感器監測“失靈”問題,在研究了船舶鍋爐啟動以及用汽量過大時鍋筒內水位表面的物理特點后,對船用鍋爐液位監測系統進行了總結,開發了一套基于短距離無線通信技術的船用鍋爐液位輔助監測系統,設計在機艙局域網范圍內對鍋爐液位進行實時監測的方式。系統在鍋爐液位監測上進行了有效的運用和試驗,試驗結果表明,該設計能實時監測鍋爐液位,設計實時性強,準確度高,具有良好的可行性和現實意義。
船用鍋爐;液位監測;局域網;移動設備
鍋爐是船舶動力裝置最早的自動控制設備,它可以自動控制水位,自動控制蒸汽壓力,控制鍋爐點火,控制燃燒時序和自動安全保護。在對機艙鍋爐液位監測系統中,傳統的船用鍋爐液位監測與報警系統的不足之處是通過觀察鏡觀察到鍋爐液位會出現假象,甚至當連通管路的濾器臟堵時,觀察鏡更不可信;當前船舶鍋爐是高溫高壓水管鍋爐,這樣的鍋爐使用少量的水就能產生很大量的蒸汽,如果蒸汽需求量突然增加,鍋筒內的壓力就會下降,鍋筒內處于高壓下的一些水就會“閃發”成蒸汽,這些氣泡會使鍋筒內水位升高。這種出現的虛水位,通過伺服電動機測出的不真實的高低水位,鍋爐內部的液體量的降低也增加了鍋爐內的蒸汽量,從而產生了虛假液位,如果監測系統不能及時發現,將會導致船舶不能正常工作,甚至發生干燒等嚴重后果。因此提出一種解決鍋爐液位可靠監測的系統是非常有必要的,以確保船舶安全、準時抵港。這次設計從鍋爐液位數據采集分析和傳送途徑入手,通過參考其他局域網產品和數據軟件開發的設計[1],將數據收集裝置、無線網等硬件和移動設備聯系在一起,短距離無線通信技術的船用鍋爐液位輔助監測系統[2],以輔助對鍋爐監控,從而最大限度地提高了對鍋爐及機艙的安全管理。
1 監測思路
船舶鍋爐監測是輪機自動化的一個相當重要的內容,通過對鍋爐液位的實時監測不僅改善了輪機管理人員的工作環境,減輕其勞動強度,及時發現鍋爐的運行故障,而且為實現無人機艙打好基礎。因而對船舶鍋爐液位監測的設備要求更高。本設計從鍋爐數據采集分析和傳送入手,通過借鑒其他藍牙產品和軟件開發的設計,將數據采集裝置、藍牙等硬件和移動液晶顯示設備結合在一起[3],開發了一套基于藍牙4.0傳輸液位數據的鍋爐液位實時采集、數據分析和高品質傳送的船用鍋爐液位輔助監測系統,以準確完成對鍋爐液位數據的實時監控。
系統結構包含采集鍋筒內液位信息的HV201數字型傳感器、鎖存器、下位機主控器、藍牙4.0數據分析和發射模塊;藍牙4.0模塊數據處理和接收模塊、通信電平轉換及無線設備接收端[4]。船舶液位監測系統的流程圖如圖1所示。

圖1 船舶鍋爐液位監測流程圖
2 硬件設計
2.1 數據采集系統
數據采集通常有2種途徑,1種是通對源數據的采集,甄別和選取。另1種是通過輪機自動化和電子信息技術記錄數據,使液位信息以直觀的數字信息顯示出來。船舶鍋爐液位信息數據采集系統的設計采用HV201數字溫度傳感器,該傳感器具有抗干擾能力強、響應快、性價比高等優點。
HV201為BCD碼液位傳感器,它是測量、控制液體自動化生產的重要組件,它采用磁性浮子在液體平面上與傳感器一起產生信號,安裝形式如圖2所示。

圖2 安裝形式圖
磁體機械部分結構如圖3所示。
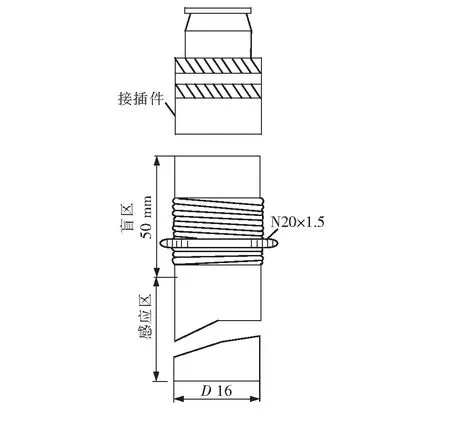
圖3 磁體機械部分結構圖
HV201數字傳感器除了機械部分外,還有電氣部分,電氣部分由信號鑒別電路、整形電路、編碼電路、譯碼電路、鎖存電路、BCD碼輸出電路等組成,如圖4所示。

圖4 電氣部分圖
通過傳感器接收到的輸入信息可以輸出0至9BCD碼,輸出的數據可鎖存至新數據的到來。可直接與各種BCD譯碼集成電路組成各式數字顯示與數字控制儀表。
2.2 數據發送與接收模塊的設計
本設計運用UART方式在手持液晶顯示設備和藍牙設備之間傳送數據。UART的方式傳送通信可靠,對于鍋爐運行環境和復雜的機艙環境是相當重要的;由于該設計采用TI的CC2540作為核心處理器[5],使得RF-BM-S01藍牙模塊具有體積小、功耗低的特點,而且2 MHz 間隙能更好地抵抗相鄰頻道的干擾,寬輸出功率調節(-23~4 dBm),-93 dBm高增益的接收靈敏度。鑒于機艙環境惡劣、鍋爐運行環境惡劣及BLE特性特點,RF-BM-S01藍牙模塊更是作為本設計的首選。同時其相對于WIFI,Bluetooth 2.0 等無線應用技術,該模塊具有低能耗、靈敏度高等優點。
3 軟件設計
下位機主控器通過鎖存及A/D轉換與藍牙4.0模塊用指令一一應答方式進行通信,當鍋爐液位發生變化時,HV201液位傳感器會接收到變化信號,然后通過傳感器的鎖存程序,A/D轉換程序將其液位的改變信號輸出為電信號并發送至下位機主控器,當液位沒有發生變化時,鎖存器將上次傳感器所采集到的信息鎖存起來,直到有更新后的最新數據輸入進來,無線設備接收端通過藍牙4.0向傳感系統發出通信信號,即可建立連接接收數據,否則處于待機狀態以節省電量;主控器通過藍牙等設備接收到指令,一般情況下會輸出一個反饋信號給主機控制器,從而進行主控器信號的輸入與輸出。下位機主控制器和RF-BM-S01藍牙模塊間通信的過程是通過系統鍵入HCI指令,進而觀察收到的HCI事件。當2個藍牙模塊成功建立鏈路后,通過藍牙4.0模塊規定的數據包格式發送至接收端。其結構流程如圖5所示。

圖5 結構流程圖
本設計的軟件主要分為兩部分:數據的采集和藍牙通信。采用Keil C51設計軟件的原因,一是C語言在與其他編程語言相比簡單易學,二是Keil C51設計軟件的研發方案與鍋爐液位監測設計系統密切相關,它通過集成開發環境將C編譯器、連接器、宏匯編、庫管理和仿真調試器等元件組合在一起,進而實現了數據采集的自動化效果。
數據采集系統部分程序如下:
{ float tt;unsigned char a,b;unsigned int temp;
if( HV201_Init() == 0 )
{HV201_Write_Byte(0xcc);
HV201_Write_Byte(0xbe);
a=HV201_Read_Byte();
b=HV201_Read_Byte();
temp = b; temp <<= 8;
temp = temp|a;
if(temp>0xfff)
{flag_temper=1;temp=(~temp)+1;}else
{flag_temper=0; }
tt = temp*0.0625; temp = tt*10+0.5;
藍牙4.0模塊無線發射部分通信軟件如下:
{Uart_Init();temp_buffer=Get_temp();
Delay_ms(1000);
while(1)
{ temp_buffer=Get_temp();BRTS=0;
Delay_ms(100);
UartPrintASCII(temp_buffer/100+0X30) ;
UartPrintASCII(temp_buffer%100/10+0X30);
UartPrintASCII(∵);
UartPrintASCII(temp_buffer%10 + 0X30);}}
手持終端藍牙4.0模塊無線接收部分通信軟件:
{SCON = 0X50; REN = 1; PCON = 0x00;
TMOD = 0x20; TH1 = 0xFD;
TL1 = 0xFD;TR1=1; ES=0; }
void UartPrintASCII(unsigned char c)
{ TI=0; SBUF=c;
while(TI==0); TI=0; }
void RECEIVE_DATA(void) interrupt 4 using 1
{ if(RI == 1)
{temp = SBUF;RI = 0;}}
4 實驗及結果分析
通過實驗科了解到鍋爐液位監測系統達到了設計時制定的各項指標限制,開發了一套可以在線檢測數據、采集數據,微機實時控制,顯示和保存數據等多任務的軟件包。
根據上述數據特征,本文進行了測試,試驗方案為:以待測鍋爐的鍋筒內淡水為試樣,進行靜態和動態對比試驗,在測試過程中,使鍋爐原有的監控系統(即觀察鏡水位計)和設計的輔助監測系統同時運行,將其各自液位系統下收集到的液位數據以時間標準記錄下來,同時用曲線圖的方式進行直觀的描述,得到的結果如圖6所示。

圖6 原有監控系統下鍋筒水位與手持終端設備接收對比圖
在圖6中,下部曲線為鍋爐原有的監控系統所測得的液位變化數據(人為讀數抄送具有間斷性),上部曲線為設計的輔助系統所測得的水位數據,從該圖形可以看出輔助系統所測液位較原有監控系統所測液位低。但這種誤差可以忽略,因為它對鍋爐安全運行以及船舶航行的作用甚微,這就證明了設計的輔助數據采集裝置完全符合實際的監測要求。同時,為了更好的提高數據采集和處理的效果,所以在硬件電路中采取了防干擾措施,進而優化其系統監測。具體有如下功能。
1)鍋筒液位動態顯示。為了動態反映鍋爐水位變化的特點,在手持終端液晶顯示屏幕上用曲線圖的形式來表現一段時間內的鍋爐液位,并輔助曲線顏色的變化,使水位的波動規律與實際情況相一致。
2)對鍋爐蒸汽系統的檢測監督。包括蒸汽壓力、蒸汽溫度、蒸汽流量、鍋爐給水量等數據監測。在日常運行中每間隔半小時采集并記錄一次數據,記錄數據包括日期、時間、液位值,報警標識符等。
對采集的數據分為實時數據和歷史數據兩個部分,歷史數據就是液位未發生新的數值更新上一次的液位采集數據以及液位折線所對應發生的日期和時間。傳送數據時用數據采集進度條顯示過程,數據采集完畢,按動數據處理按鈕,該系統就會對接收的信號進行處理及記錄。
5 結束語
本系統結構簡單、操作方便、性能安全,不僅可以單獨運作,還可以與船舶上其它自動化系統連接使用;既可以在船舶機艙設備上智能化應用,也可以擴展到其他工作環境惡劣的領域。通過試驗證明,該系統具有精確的數據傳輸精度和快速的響應特性,將該系統運用到油輪上用以監測貨油艙油位液位數值。也可以應用到其他安全要求較高的船舶上,進行預防溢油的發生等其他船舶事故。
[1] 李良.無線傳感網絡關鍵技術研究[J].科技信息,2008(32):80.
[2] 陳濤,劉景泰,邴志剛.無線傳感網絡研究與運用綜述[J].自動化與儀表,2005(S1):41-46.
[3] 許銘.藍牙技術的原理與實現[D].北京:中國科學院研究生院(計算技術研究所),2002.
[4] 董國軍.藍牙無線通信技術及其應用研究[D]. 天津:天津大學,2004.
[5] 金純,賈珍梅,劉魯云.基于CC2540的超低功耗藍牙模塊的設計[J].電視技術,2015(1):60-64.
For marine boiler consumption of vapor increase of high and low liquid level sensor monitoring the failure problem,after studying the marine boiler start-up and excessive consumption of vapor inside the drum water level on the surface of the physical characteristics,for marine boiler liquid level monitoring system has carried on the induction, has developed a marine boiler liquid level based on the technology of short distance wireless communication auxiliary monitoring system,within the scope of design in the engine room local area network for real-time monitoring of the boiler liquid level.On the boiler liquid level monitoring system to carry on the effective use and test.The test results show that the design can real-time monitoring the boiler liquid level.The design's real-time performance is strong and high accuracy, which has good feasibility and practical significance.
marine boiler;level monitoring;local area network;mobile devices
浙江省大學生科技創新活動計劃暨新苗人才計劃項目(2014R411050)
李強(1992-),男,安徽臨泉人,在讀本科生。
U672;TP212.1
10.13352/j.issn.1001-8328.2016.01.009
2015-11-10
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
工業設計(2022年8期)2022-09-09 07:43:20
船舶(2021年4期)2021-09-07 17:32:22
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
測控技術(2018年9期)2018-11-25 07:45:00
石油化工自動化(2018年5期)2018-11-14 02:34:30
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2015年2期)2015-02-28 12:15:41
