基于GT-drive的整車控制策略研究*
2016-07-01 01:16:10王志紅杜長清楊慧萍
武漢理工大學學報(交通科學與工程版) 2016年3期
王志紅 張 飛 杜長清 楊慧萍 劉 云
(武漢理工大學現代汽車零部件技術湖北省重點實驗室 汽車零部件技術湖北省協同創新中心1) 武漢 430000) (鄭州日產汽車有限公司2) 鄭州 450000)
基于GT-drive的整車控制策略研究*
王志紅1,2)張飛1)杜長清1)楊慧萍1)劉云1)
(武漢理工大學現代汽車零部件技術湖北省重點實驗室汽車零部件技術湖北省協同創新中心1)武漢430000) (鄭州日產汽車有限公司2)鄭州450000)
摘要:將國內某款乘用車改裝成插電式混合動力汽車(PHEV),對其中整車控制策略進行研究設計.根據不同工況控制需求,設計出整車喚醒、動力控制、制動能量回收等策略.應用仿真軟件GT-drive進行仿真分析.結果表明,設計的控制策略滿足車輛設計指標,以電為主的控制策略下油耗為3.92 L·(100 km)-1,相比較原車型節油48.5%.同時在FTP75工況模擬運行中,很好的實現能量在發動機和電機之間的分配.
關鍵詞:插電式混合動力汽車;整車控制策略;GT-drive
0引言
為應對汽車燃料消耗快速增長及由此引起的能源和環境問題,我國發布了乘用車燃料消耗量第四階段標準,針對2020年我國乘用車產品平均燃料消耗量達到5 L·(100 km)-1的目標,國內各大汽車整車廠紛紛將眼光投向新能源汽車領域.
作為插電式混合汽車控制系統中重要一部分,整車控制決定了該混合動力汽車的性能.由于PHEV存在兩種以上的動力源和多種工作模式,且它們之間又存在復雜的耦合模式,所以必須根據不同的工況對電機和發動機進行合理的能量分配,以達到車輛最佳的動力性能、燃油經濟性和排放性能PHEV整車結構[1-2].
1PHEV整車構成
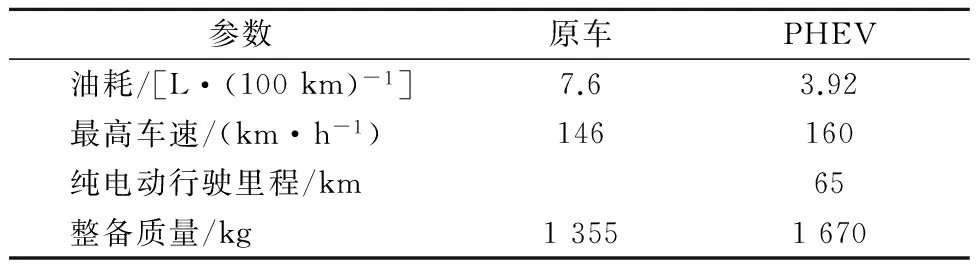
所研究的PHEV是在原有車型的平臺上,對其動力系統進行改裝.現有結構保留了原先發動機,將五檔變速器改為CVT無級變速器,改善駕駛員的操縱方便性和乘員的乘坐舒適性.同時增加牽引電機和輔助電機以及動力電池.在電機的選擇上,選用開關磁阻電機,具有啟動轉矩大,啟動電流低、適用于頻繁啟停及正反向轉換運行等工況,整車主要參數見表1.
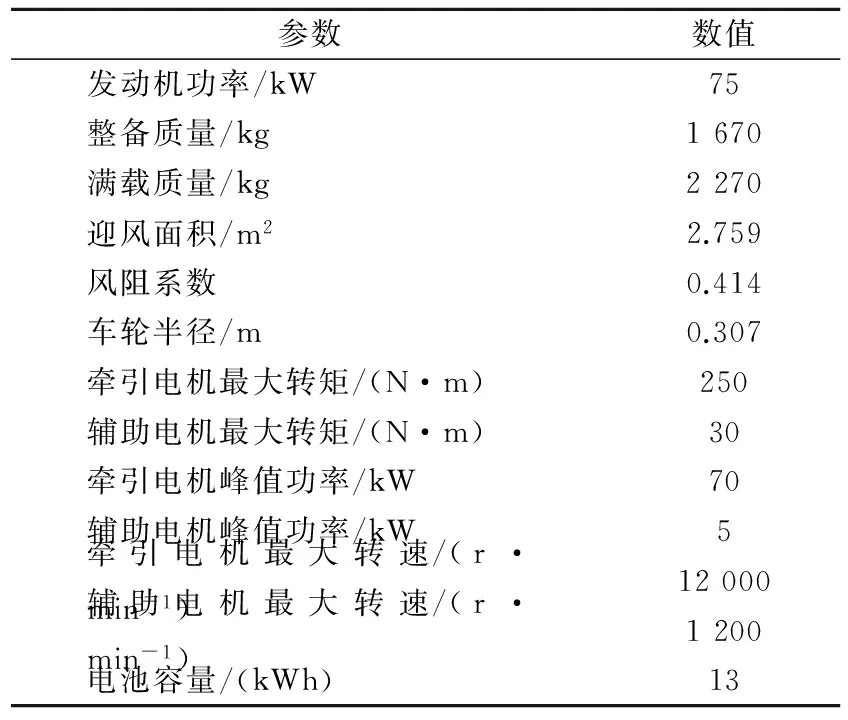
表1 PHEV主要參數
在混合動力系統結構布置方面,PHEV采用并聯式混合動力系統,發動機和動力電池作為獨立動力源可同時車輛提供動力.整車控制器位于整車架構的頂層,負責接受其他控制器及電器的信號,并對這些信號做出處理,通過計算得出結論,利用CAN總線將這些指令傳送給相應的電器模塊,然后其他控制器或者電器根據得到的命令進行相應的動作,以此來實現整車的驅動控制、能量管理控制、安全管理控制等功能[3].整車動力系統結見圖1.
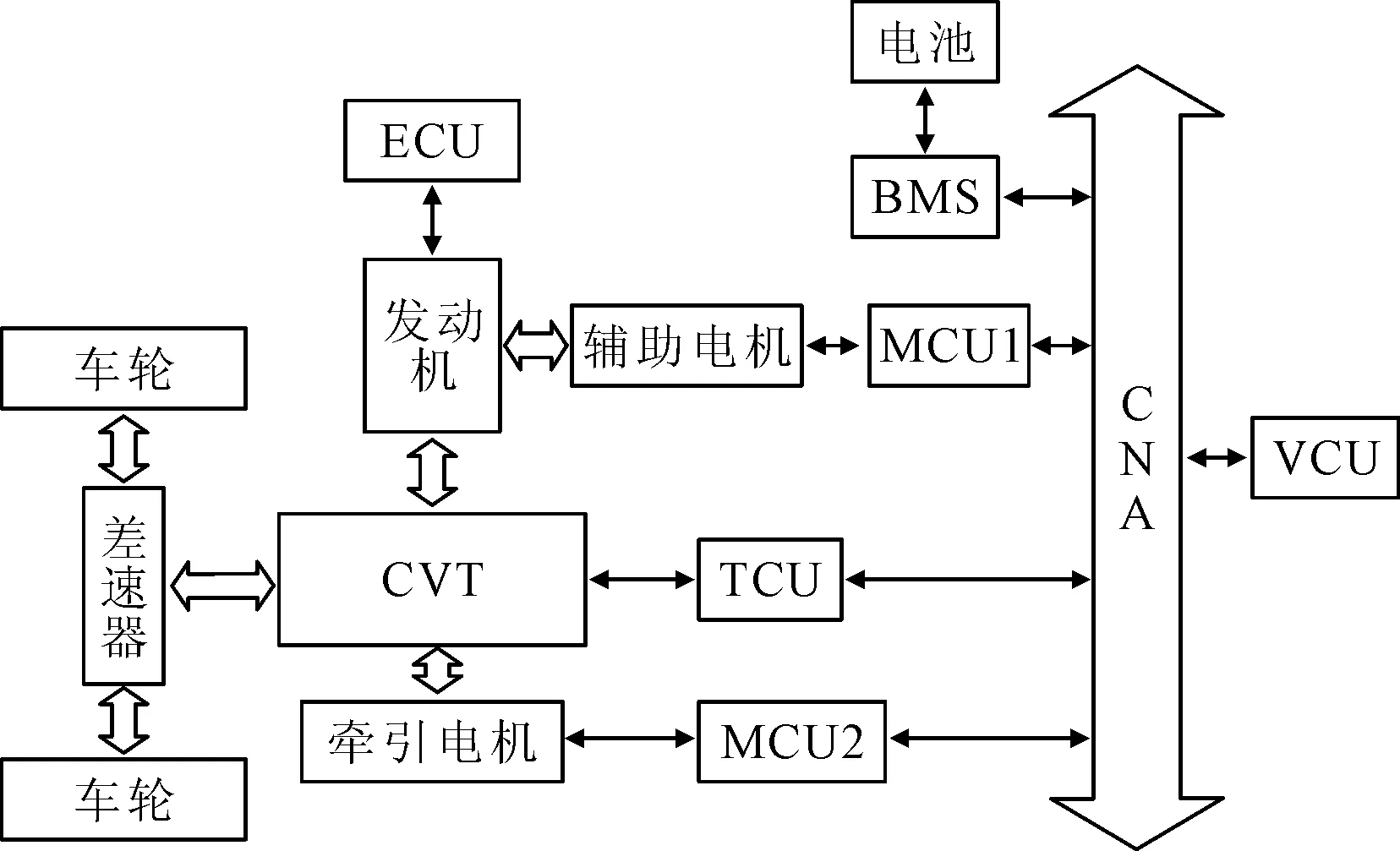
圖1 整車動力系統結構圖
整車控制器位于整車架構的頂層,負責接受其他控制器及電器的信號,并對這些信號做出處理,通過計算得出結論,利用CAN 總線將這些指令傳送給相應的電器模塊,然后其他控制器或者電器根據得到的命令進行相應的動作,以此來實現整車的驅動控制、能量管理控制、安全管理控制等功能.
2整車控制策略
合理的整車控制策略,是混合動力汽車獲得良好的燃油經濟性、動力性和舒適平穩的駕駛性的前提[4].它需要決定進入某個激活的車輛狀態(OFF,行車模式、充電模式等),并且根據輸入觸發條件切換到另一個車輛狀態,同時也需要根據車輛不同的需求,在發動機和電機之間合理的分配轉矩.
2.1整車系統喚醒控制策略
2.1.1停車充電喚醒控制策略
插電式混合動力系統與傳統汽車相比除了增加一個動力源,還具備停車外插充電功能.因此插電式混合動力系統整車喚醒功能除了通過鑰匙激活以外,還需考慮通過充電槍激活整車系統.
由圖2可知,車輛處于停車靜止,此時進行停車充電.當檢測到充電槍插入信號時,12 V的弱電會給整車系統上電,充電機、VMS等進行自檢,檢查系統是否能夠正常進行充電,當自檢通過時,VMS則會發送“激活高壓”指令,當高壓激活完成,充電機進行充電.當自檢未通過,系統會檢測故障并進行判斷定級,最終在儀表板上顯示.
2.1.2行車模式喚醒控制策略
行走模式喚醒控制策略流程圖見圖3.
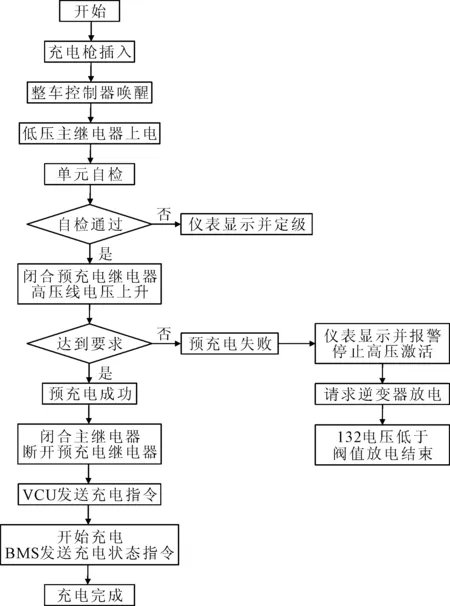
圖2 停車充電喚醒控制策略流程圖
由圖3可知,本文中鑰匙有4個位置:LOCK,ACC,ON,START.當鑰匙處于ACC時,輔助電器上電(收音機、真空泵等);當鑰匙處于ON時,空調、儀表、冷卻風扇、水泵等器件上電,并開始自檢,為高壓激活做準備.高壓激活分為兩個步驟,首先進行預充電,在預充電過程中會對高壓總線電壓及其他參數進行實時檢測,當檢測未通過時,終止預充電;當鑰匙處于START時,如果整車準備好(預充電完成),VCU將閉合主繼電器,斷開預充電繼電器,高壓激活完成,整車實現喚醒.
2.2整車驅動控制控制策略
當整車已被喚醒時,系統接收駕駛員操作信號并處理,實現整車動驅動控制.與傳統汽車驅動控制的不同在于,混合動力系統存在發動機和電機兩個動力源,不同行駛工況對應著不同運行模式,如何在發動機和電機之間分配動力以及切換不用運行模式是驅動控制策略的重點[5].
目前混合動力汽車控制策略主要分為規則型控制策略和最優化控制策略.規則型控制策略因控制簡單、效果好被廣泛應用.為了充分利用電網電能,最大化的減少發動機的使用,設計的PHEV驅動控制策略采用以電為主的規則控制策略,車輛運行的能量主要來自電機,發動機主要在某些特定情況使用.
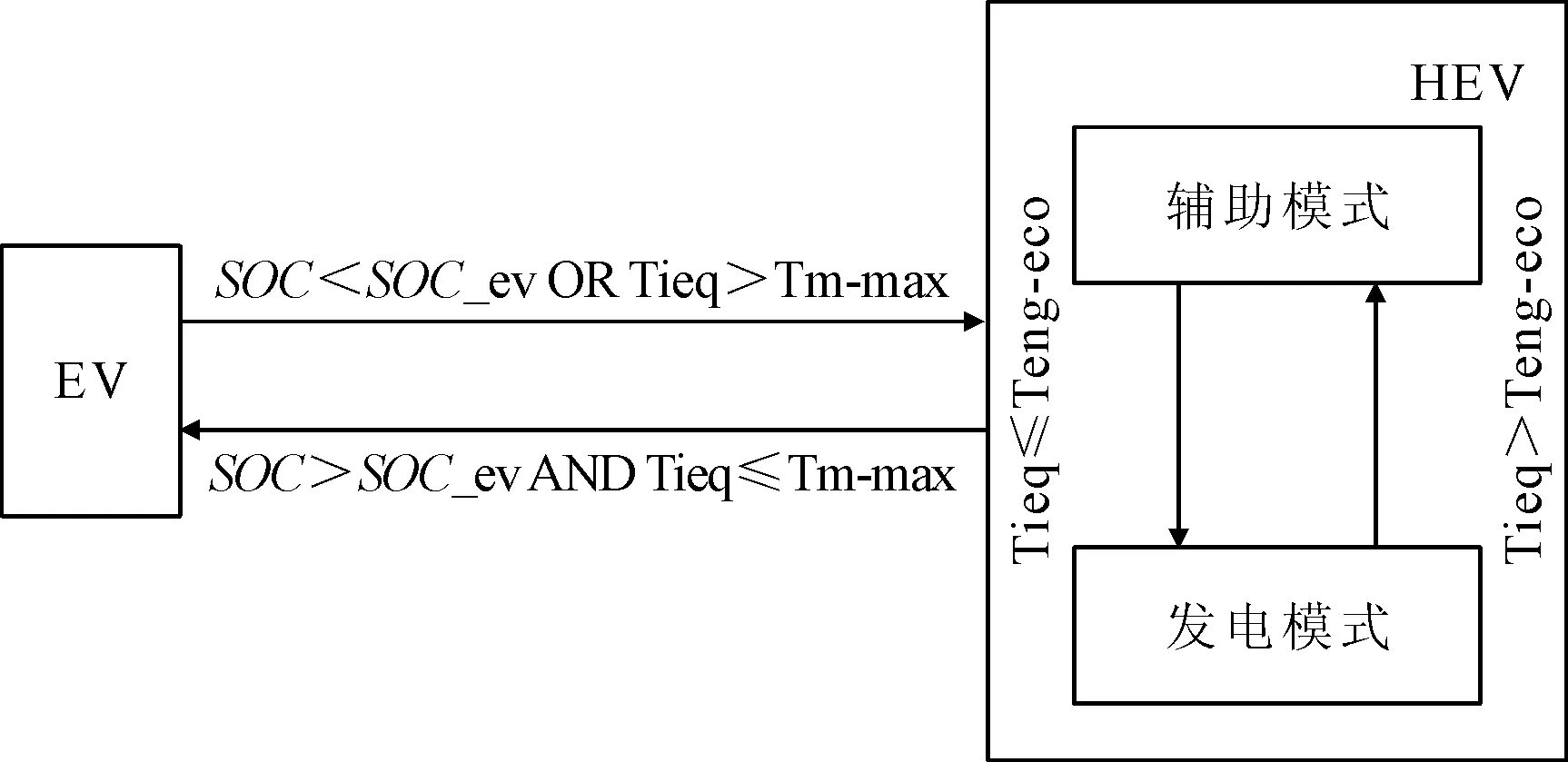
PHEV有3種運行模式:純電動模式(EV)、混合動力模式(HEV)、制動模式.在HEV中根據電機的作用又可分為輔助模式和發電模式.不同模式切換控制策略如下.
當SOC≤SOCsafe,禁止行車.
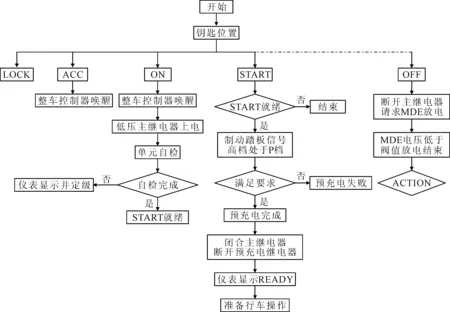
圖3 行走模式喚醒控制策略流程圖
當SOCsafe 當SOCev≤SOC且Tm-max≥Treq,車輛進入EV模式,發動機關閉,牽引電機工作提供全部驅動力矩.Teng=0,Tm=Treq. 當SOCev≤SOC且Tm-max 若Teng-eco 若Teng-eco≥Treq,車輛進入輔助模式,電機輔助發動機工作,盡可能的多利用電機輸出轉矩,不同模式切換流程見圖4. 圖4 運行模式切換 圖中:SOCsafe,SOCnor,SOCev分別為車輛安全行駛、正常行駛和EV模式下行駛最低SOC限值;Treq為車輛需求轉矩;Tm-max為電機最大轉矩;Teng-eco為發動機在經濟高效區域轉矩. 2.3制動能量回收控制策略 制動能量回收是混合動力系統控制最重要的一部分,在一定程度上決定了整車的動力性和經濟性.所謂的制動能量回收是指汽車在制動或滑行時,驅動電機利用車輪的反向拖動,產生一個反向力矩,此時驅動電機轉化為發電機,將電能儲存在蓄電池,將原本以熱能消失的能量回收再利用.整車制動能量回收控制流程見圖5. 圖5 制動能量回收控制策略流程圖 回收制動是為了能量的有效利用,但并不是每個制動過程都會進行,這需要綜合考慮制動回收系統壽命、性能等因素[6-7].目前主要以蓄電池SOC值為參考,當電池滿電,此時無法承受大電流充電,主電機能夠提供的制動轉矩及其有限,甚至為零.在這種情況下,發動機將提供全部制動轉矩.隨著SOC的降低,主電機回收制動產生的制動轉矩增大.傳動系統將速比設高,減少發動機傳遞給輸出軸的制動轉矩.在某一時刻,主電機將會提供全部所需的制動轉矩,離合器將會提前斷開,保證發動機提供的制動轉矩為零. 回收制動能力還受到電機發電能力的限制,制動回收的過程中,制動力矩不能超過電機所能提供的最大力矩[8].這就意味著制動力很大時,單獨的電機制動往往不能滿足制動需求,需要機械制動和電機制動共同作用. 3仿真分析 目前電動汽車仿真方法分為前向仿真和后向仿真,前向仿真方法適合用于開發硬件在回路系統,而后向仿真適用于控制策略的評估與篩選[9]. GT-drive是GT-suite軟件的主要組成部分.GT-drive可以用于車輛的動力性,燃油經濟性以及排放性能的仿真,采用模塊化 的建模理念使得用戶可以便捷的搭建不同 配置的車輛模型,具有復雜完善的求解器,確保計算的快速完成[10]. 為了驗證設計的整車控制策略的可靠性和合理性,利用GT-drive仿真軟件建立整車后向仿真模型,見圖6. 圖6 PHEV整車仿真模型 由圖6可知,整車動力系統結構采用GT-drive中MECHANICAL模塊搭建,如發動機、變速器、電機等;控制系統則利用CONTROL模塊進行模擬.模型搭建后,將整車參數輸入模型,設置循環工況參數,運行系統. 圖7為循環工況車速圖.由圖7可知,在驗證控制策略驗證的循環工況選擇上,采用路況復雜的FTP75.時長1 874 s,最高車速91.45 km·h-1,平均車速34.1 km·h-1,整個過程存在加速、減速、制動等工況. 圖7 循環工況車速圖 圖8為SOC變化圖,圖9為電機和發動機功率圖.由圖8~9可知,車輛啟動時SOC值為0.6,電池電量充足,車輛以EV模式運行.啟動后SOC會有短暫上升趨勢,這是因為車輛進行急加速,需求轉矩大于電機最大轉矩,此時雖然電量充足,車輛進入HEV模式,發動機提供轉矩的同時為蓄電池充電.隨后SOC整體呈下降趨勢,整車以電消耗為主,發動機作為輔助動力源.在下降的過程中SOC仍然會有少許波動,這是因為制動過程中制動能量回收的緣故.在整個運行工況中,發動機工作區間小,車輛充分利用蓄電池電能提供動力,避免發動機工作,不同模式間的切換迅速且準確. 圖8 SOC變化圖 圖9 電機和發動機功率圖 將仿真結果與原車型參數進行對比,見表2. 表2 仿真參數與原車型參數對比 由表2可知,仿真結果得到的PHEV各項都滿足要求,其中油耗為3.92 L/(100 km),比原車節油48.5%.由于采用原發動機,增加蓄電池,雖然整車重量增加315 kg,但整車功率也相應增加,故動力性得到一定提高. 4結 束 語 為降低油耗,在傳統車型上進行了插電式混合動力汽車改造設計并在車輛運行的不同階段設計了不同控制策略. 所設計的整車控制策略很好地實現了對車輛的控制.根據以電為主的控制策略仿真結果油耗為3.92 L/(100 km),在循環工況運行中,根據SOC和轉矩需求,整車以純電動模式啟動,先后經歷發動機驅動并給電池充電、發動機和電機聯合驅動、制動能量回收等模式,在切換過程中迅速且準確,滿足設定要求,這為后續樣機的制作提供了理論基礎. 參 考 文 獻 [1]王云龍,張洪田.混聯式混合動力系統模糊控制器研究[J].武漢理工大學學報(交通科學與工程版),2013,37(4):733-736. [2]TONY M, ANDREW S. Plug-In hybrid electric vehicle energy storage system design[C]. Advanced Automotive Battery Conference,2006. [3]宋雪靜.基于雙MCU的純電動汽車整車控制器硬件設計[J].汽車電器,2014(5):33-36. [4]朱敏曄,趙治國,蕭蘊詩.基于 MPC555 的 HEV 控制系統開發[J].華東交通大學學報,2007,24(4):101-103. [5]吳劍.并聯式混合動力汽車能量管理策略優化研究[D].濟南:山東大學,2008. [6]高樹健.電動汽車的回收制動控制策略研究及仿真[D].西安:長安大學,2013. [7]林雙武.電動汽車制動控制策的略研究 [D].哈爾濱:哈爾濱工業大學,2010. [8]趙國柱.電動汽車回收制動若干關鍵問題研究[D].南京: 南京航空航天大學,2012. [9]夏青松.電動汽車動力系統設計及仿真研究[D].武漢:武漢理工大學,2007. [10]張睿,孫濤,王凱.基于GT drive某車的動力性與經濟性能仿真分析[J].汽車實用技術,2013,27(4):26-29. Research on the Vehicle Control Strategy Based on GT-drive WANG Zhihong1,2)ZHANG Fei1)DU Changqin1)YANG Huiping1)LIU Yun1) (WuhanUniversityofTechnologyHubeiKeyLaboratoryofAdvancedTechnologyforAutomotiveComponents,HubeiCollaborativeInnovationCenterforAutomotiveComponentsTechnology,Wuhan430000,China)1)(ZhengzhouNissanAutomobileCo.Ltd.,Zhengzhou450000,China)2) Abstract:In this study, a conventional vehicle is converted into a Plug-in Hybrid Electric Vehicle (PHEV) and the corresponding vehicle control strategy is designed. According to different driving conditions, the vehicle start-up strategy, powertrain control strategy and braking energy recovery strategy are designed. The software GT-drive is used to model and to simulate the PHEV. The analysis results show that the control strategy of PHEV can meet the requirements of vehicle in different driving conditions and the vehicle has good power performance and fuel economy. In the full use of electric energy, the fuel consumption per 100 km is found to be 3.92 L, which is 48.5% lower than that of the traditional vehicle. Key words:PHEV; vehicle control strategy; GT-drive 收稿日期:2016-04-29 中圖法分類號:U469.72 doi:10.3963/j.issn.2095-3844.2016.03.022 王志紅(1980- ):男,講師,主要研究領域為新能源汽車及動力控制 *國家自然科學基金項目資助(51275367)