數字化自動調諧系統出現的主要問題及處理
2016-07-04 03:53:40趙秋香
中國新通信 2016年10期
趙秋香
一、概述
TBH-522型150KW短波發射機,其高周系統調諧元件的機械定位由自動調諧系統進行控制。全機共有八個被調元件,分別稱為l~8路。
l路——一高前級回路電容器,作本級調諧用,作粗調和細調;2路—一—高末級腔體短路板,作粗調;3路——一高末級調諧電容,作粗調和細調;4路——一高末級調諧電容,作粗調;5路——一高末級調載電容,作粗調和細調;6路——一高末級調載線圈,作粗調;7路——一室內型匹配器中的可變電容器,作粗調;8路——一高前級調諧電感,作粗調。
被調元件包括線圈和真空可變電容器等,改變其機械轉動因數即可改變其電參量,通過直流伺服電機驅動的傳動裝置輸出機械轉動力矩即可實現這種改變。每一傳動裝置上都裝有一個與被調元件機械聯動的多圈電位器(稱為跟蹤電位器,隨動電位器),其機械位置與相應的被調元件完全對應,當在它兩端加上直流電壓時,即可用其中心頭對另一端的電壓值代表該電位器的位置,從而也代表對應被調元件的位置信息(電參量信息)。事實上,可用另一個電位器(稱為給定位置電位器,主動電位器)與上述跟蹤電位器相并聯組成電橋電路,然后在電橋的兩端加上直流電壓,則在兩電位器的中點間可得到由兩者機械位置差決定的誤差電壓,當兩者位置相同時該電壓為零,否則上述電壓為正或負值。
上述由跟蹤電位器跟蹤給定電位器位置電壓而實現的只是被調元件的粗調。要想準確定位,有的被調元件還需進行細調。細調誤差信號由鑒相器和鑒阻器給出。本機只有三個元件須進行細調(1路、3路和5路)
二、運行中出現的問題及改進方法
問題一:第6、8路在多次的倒動過程中會偶然出現數據的跳變,造成實際到位時誤差較大,如在倒頻中出現,就會引起機器失諧,造成停播。
原因:在FPGA邏輯芯片內部的實際位置計數器的數據產生跳變。
處理:通過單片機對數據進行實時檢測,當發現數據發生跳變時,單片機就能及時檢測到,并立即將發生跳變前的準確數據重新寫入計數器中,使倒頻能夠順利進行。
問題二:2、7路控制氣閥的繼電器在吸合的過程中會發生抖動。2路氣閥的抖動直接影響腔體短路板的正常轉動,延長倒頻時間;上激勵后7路氣閥的抖動會造成匹配器閘刀的燒壞,影響安全播音。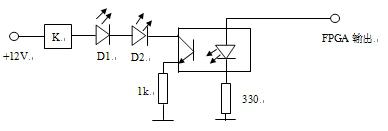
原因:控制氣閥的繼電器工作回路如上圖。
當FPGA輸出的控制信號使光耦導通時,繼電器K就應該吸合,測繼電器線包兩端的電壓為8.2V左右,而此繼電器的正常吸合電壓在7.8—8.0V左右,因此繼電器工作時的電壓接近吸合電壓的臨界狀態,當有高頻信號干擾時,就可能引起繼電器的抖動。
處理:為使繼電器能可靠吸合,且又方便查看,將安裝在下面主板上的發光二極管D2短路,使繼電器的工作電壓上升到10V左右,就能可靠吸合。
問題三:倒頻過程中,當調諧狀態進入細調時,會出現2路的實際計數被清零,這樣在下次倒頻時2路就不能正常到位。
原因:由于2路傳動器安裝在腔體后部,當機器進入細調狀態時,傳動器處在一定的強高頻磁場內,且2路傳動器的引線較長,極易引入高頻干擾,造成下限位的光電限位開關可能處于關斷狀態,2路的實際計數被清零。
處理:在FPGA的邏輯電路中,當粗調完成進入細調后,就將不需細調的2、4、6、8路的實際位置計數器進行鎖定,不能被高頻所干擾,只有在下次倒頻時才解除。
問題四:諧完成后,寬放的輸出幅度出現擺動,特別在13M時,還能聽到寬放小盒內的嘯叫聲。
原因:用示波器觀察合成器的輸出信號,輸出信號的幅度按較高的頻率變化,再用示波器觀察合成器激勵電平控制信號,也能看到在其直流電平線上疊加有高頻干擾信號,正是這些干擾信號使其控制合成器的輸出幅度信號發生變化。
處理:激勵電平控制信號是由主板產生,通過一個電子電位器輸出一個0—2V的直流信號,在正常工作時的輸出幅度為0.4V左右。將該信號用高頻電感電容組成的π型濾波器及470μF電解電容進行濾波,使激勵電平控制信號是一個純粹的直流電平信號,就可消除擺動的現象。
問題五:鑒相信號的處理。開始時,直接采用原自動調諧系統內檢測單元小盒中的鑒相信號輸入到單片機內進行判斷處理,但每次倒頻時1、3、5路細調后到位情況均不一樣,出現較大的誤差。
原因:是由于原信號輸出幅度不大,Q值不高,使得在接近調諧點時誤差較大,不能準確到位。
處理:將原信號進行放大10倍,再用穩壓二極管把電壓穩在5V以內,以保證單片機的輸入電壓要求,同時提高了Q值,使之能準確的調諧到諧振點上。
三、小結
調諧系統的自動化程度,對于實現發射機的自動化控制有著舉足輕重的地位。現在,數字化調諧系統的應用大大提高了發射機的數字化程度,使得發射機的自動控制成為了可能。不過要做到在局信息化平臺上高速、可靠地運行,還需不斷完善,這也是我們今后的努力方向。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中國生殖健康(2019年3期)2019-02-01 06:12:26
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年19期)2017-02-02 07:08:27
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00