基于混合式體系結構的無人船控制系統設計
2016-07-05 06:10:39柳晨光初秀民
船海工程 2016年3期
謝 朔,柳晨光,初秀民,吳 青,c
(武漢理工大學 a.國家水運安全工程技術研究中心;b.能源與動力工程學院;c.物流工程學院,武漢 430063)
基于混合式體系結構的無人船控制系統設計
謝朔a,b,柳晨光a,b,初秀民a,吳青a,c
(武漢理工大學 a.國家水運安全工程技術研究中心;b.能源與動力工程學院;c.物流工程學院,武漢 430063)
摘要:為了提高無人船在復雜的環境下自主航行與避碰的適應能力,設計了一種兼顧反應式行為和智能決策行為的混合式體系結構控制系統。該系統在普通的三層分層遞階控制系統上加入分析層,該層包括信息分析與行為分析兩個模塊,兩模塊采用基于權重的方法將無人船航行事件劃分優先級,高優先級事件(避碰)通過反應式行為執行,而低優先級事件(自主航行)通過智能決策行為執行。通過無人船自主航行與避碰實驗驗證了該系統能在實時避碰的情況下滿足自主航行要求。
關鍵詞:無人船;控制系統;混合體系;優先級
為了滿足無人船在復雜環境下的自主航行和避碰需求,需要設計實時性、穩定性好的無人船控制系統,國內外諸多學者為此開展了廣泛的研究。其中,基于分層遞階控制的結構體系控制系統已成為研究熱點[1-3]。作為一種自適應、自組織、自學習的智能控制方法,分層遞階控制已經被應用到一些多任務無人艦船的控制系統中[4-6]。然而,對于在復雜水面環境下實際航行的無人船,需要在自主航行的同時完成實時避碰的緊急任務,普通的分層遞階控制系統對緊急情況難以做出迅速反應,難以滿足控制系統需求。因此,如何提高無人船控制系統在復雜環境下的控制實時性和穩定性是一個關鍵問題。混合式體系結構作為一種兼顧分層遞階控制和緊急反應式控制的體系結構,能夠在全局智能分層決策的情況下實現對局部緊急任務的實時處理[7]。該控制體系在自動駕駛車輛[8-9]上得到了廣泛應用。借鑒于此,結合駕駛行為的研究方法[10-11],提出一種基于混合式體系結構的無人船控制系統。該系統在分層遞階控制中引入信息分析和執行分析層,形成混合式系結構,以構成感知-行為以及感知-規劃-行為兩種控制路線,前者執行較高優先級反應式任務(避碰),后者執行較低優先級規劃任務(自主航行)。該系統各結構相對獨立,采用標準消息協議信息共享與協同合作。
1系統結構以及運行機制
1.1系統結構
提出混合式體系結構見圖1,總體上采用4層混合式體系結構,通過在普通的3層分層遞階控制體系中加入分析層來產生介于上層決策與下層執行機構之間的反應式運行通路。其中,各層次之間的信息傳遞采用信息總線進行共享。
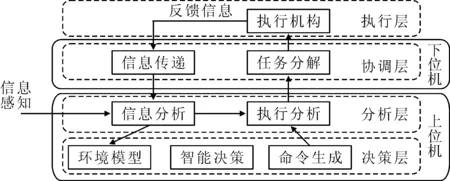
圖1 混合式體系控制結構
1) 決策層。主要由環境模型,智能決策和命令生成3個模塊構成。在接受由協調層傳遞的信息之后,從所建立的模型中更新狀態信息,然后由智能決策模塊對無人船的行為、路徑做出評價,生成最優的方案,并由規定格式轉化為執行命令。
2) 分析層。分為信息分析與執行分析2個模塊。信息分析模塊的作用是:對于一般狀態下的航行任務,將信息傳遞到決策層以供較高等級的智能規劃決策;對于緊急情況下的任務,直接將用于該任務的航行信息由信息分析模塊傳遞到執行分析模塊形成反射行為。執行分析模塊的作用是:由信息分析模塊直接傳遞來的信息生成對應的緊急航行任務的命令,然后傳遞給協調層;而對于協調級傳來的一般航行命令,按優先級順序傳遞給協調層。
3) 協調層。其主要作用是將執行機構的反饋信息傳遞給分析層,并分配由分析層傳遞的決策方案,對應不同的執行機構分解為不同的子任務,同時確定各子任務的執行順序與執行條件。
4) 執行機構。包含用于執行航行命令的機構(舵、槳)以及部分反饋信息給控制系統的反饋機構,是自動控制模塊最底層的部分。
1.2系統運行機制
1.2.1整體運行機制
整體上,該混合式結構體系中的兩條系統通路為:①對于緊急事件的處理,感知的信息被發送到上位機中的信息分析模塊,進而直接反射到執行分析模塊中,信息處理生成指令分配給執行機構;②對于一般航行任務的處理,感知到的信息經過信息分析模塊處理成統一的信息格式傳遞給上位機,經過決策層的程序進行處理后再將生成的操縱指令以統一的格式傳遞給下位機,最后將指令分配到執行層的各執行機構。
要實現上述對不同航行事件的處理,需要對航行事件劃分優先級,使低優先級的事件由通路②進行智能決策處理,而高優先級的緊急事件由通路①進行反應式處理。
1.2.2基于權重的優先級劃分方法
仿照神經網路的學習推理機制,采用對事件加以權重的方法進行分類。事件的權重處理過程見圖2。
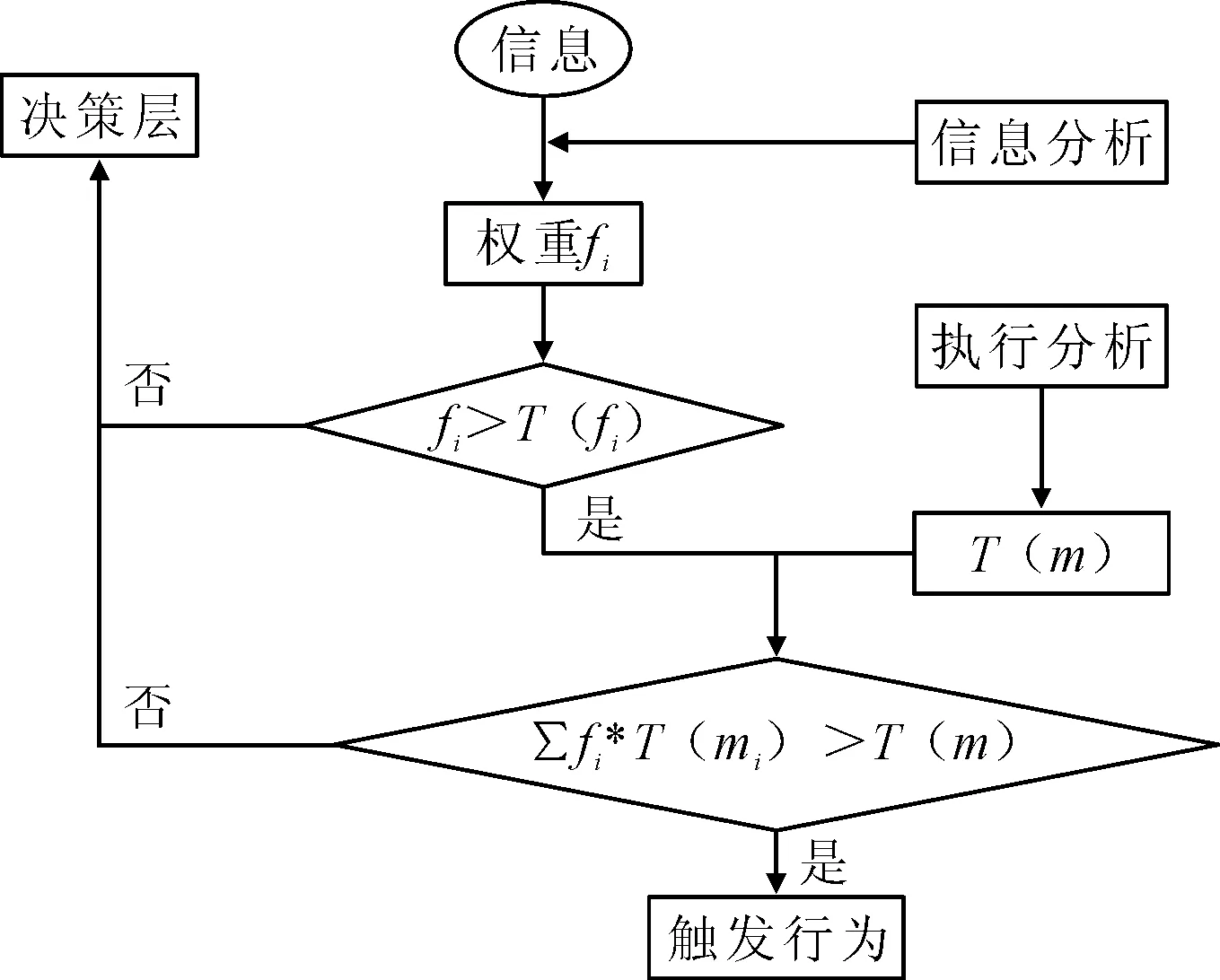
圖2 事件權重處理過程
以避碰過程為例解釋為:當無人船信息感知模塊(雷達以及超聲波傳感器等)檢測到前方障礙物時,由信息分析模塊分析出當前障礙物信息以及船自身的航行信息并對每條信息加以權重fi,當滿足以下閾值條件時,由信息分析模塊直接反射到執行分析模塊:
(1)
式中:T(fi)——每條信息傳遞的閾值。
當信息權重大于該閾值,判定為緊急安全信息,當其到達執行分析模塊后,由一系列學習好的反射庫進行匹配,迅速作出避讓行為決策序列mi,比如轉舵、減速等。每個行為均有觸發閾值設定T(mi),當子行為滿足以下閾值條件時,可以直接進入執行層執行避讓行為指令。
(2)
式中:T(m)——設定的總閾值。
由于執行分析模塊要同時處理由信息分析模塊和決策層傳遞來的命令。在同一時刻的避讓操縱可能會由2個通路同時傳遞,此時,由直接反射傳遞來的操縱指令直接影響執行層的執行過程,系統不必等待決策層的規劃指令。當直接反射指令處理完畢之后,繼續執行決策層的規劃指令。具體表現為:無人船對于突現障礙物表現為反射性避讓,對于整體的固定障礙物或者障礙群,由決策規劃的最優路徑進行總體操控。
2系統設計
2.1硬件設計
分為用于實現智能決策與規劃的上位機和分配執行任務生成操作指令的下位機以及執行控制命令的執行機構3部分,在功能上分別對應混合體系中的決策層與分析層、協調層及執行層。具體設計如下。
1) 上位機運行控制系統決策層的智能決策程序,無人船自主航行時,岸端的感知設備感知的信息均以無線通信的方式傳遞給上位機。綜合以上要求,選用帶有RS232通信接口和4 G網絡模塊的工控機作為上位機。
2) 下位機實現控制系統中的協調層的功能,介于決策和執行機構之間,需要一定的快速響應能力。使用基于STM32F407系列單片機作為控制芯片的電路板。該電路板采用RS232串口通信總線與上位機進行通信,同時將指令傳遞給執行機構并接收反饋回來的信息。電路板上各功能模塊見圖3。
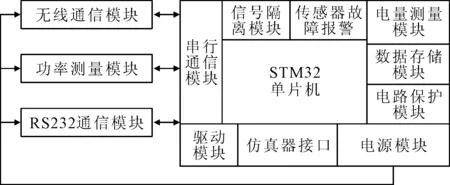
圖3 下位機功能模塊
3) 控制系統的執行機構包括推進電機、舵機控制系統。同時在執行機構上安裝用于檢測螺旋槳轉速的轉速測量傳感器和用于檢測舵角的角度測量傳感器。
2.2程序設計
從系統總體組成可知該控制系統的程序主要包含上位機和下位機的程序。
1) 上位機程序。包括決策層的智能決策程序和分析層的信息分析和執行分析程序。程序流程為信息分析部分程序對外部傳感器的信息以及執行機構反饋信息的優先級劃分處理,低優先級的信息傳遞到智能決策程序,該程序將所需要的參數傳遞到船舶航跡跟蹤模型中解算操縱指令并傳遞給執行分析程序,完成一般航行任務。高優先級的信息則直接傳遞到執行分析程序,并作出反應式的行為指令。該程序基于VC平臺編寫,在上位機中運行。
2) 下位機程序。包括2個部分:上位機與下位機之間的信息傳遞程序和下位機與執行機構之間的信息傳遞程序。上下位機的信息傳遞協議有用于識別消息的標識碼、數據長度、發送/請求位以及表征信息優先級的信息權重。而下位機與執行機構的信息處理方式為:以脈沖寬度調制實現電機的變壓調速以及舵機的控制。以中斷方式接收螺旋槳轉速與舵角傳感器反饋的信息。需要設計的程序主要包括單片機的初始化配置、信息斷與處理函數以及PWM波指令的生成等。
3實驗驗證
為驗證所設計的混合式結構無人船控制系統的實時性和魯棒性,使用模型船實驗平臺進行驗證。該實驗平臺包括搭載了該控制系統的一艘模型船、用于定位船舶的攝像頭和用于遠程監控的計算機。其中,實驗平臺見圖4,模型船見圖5。

圖4 模型船實驗平臺
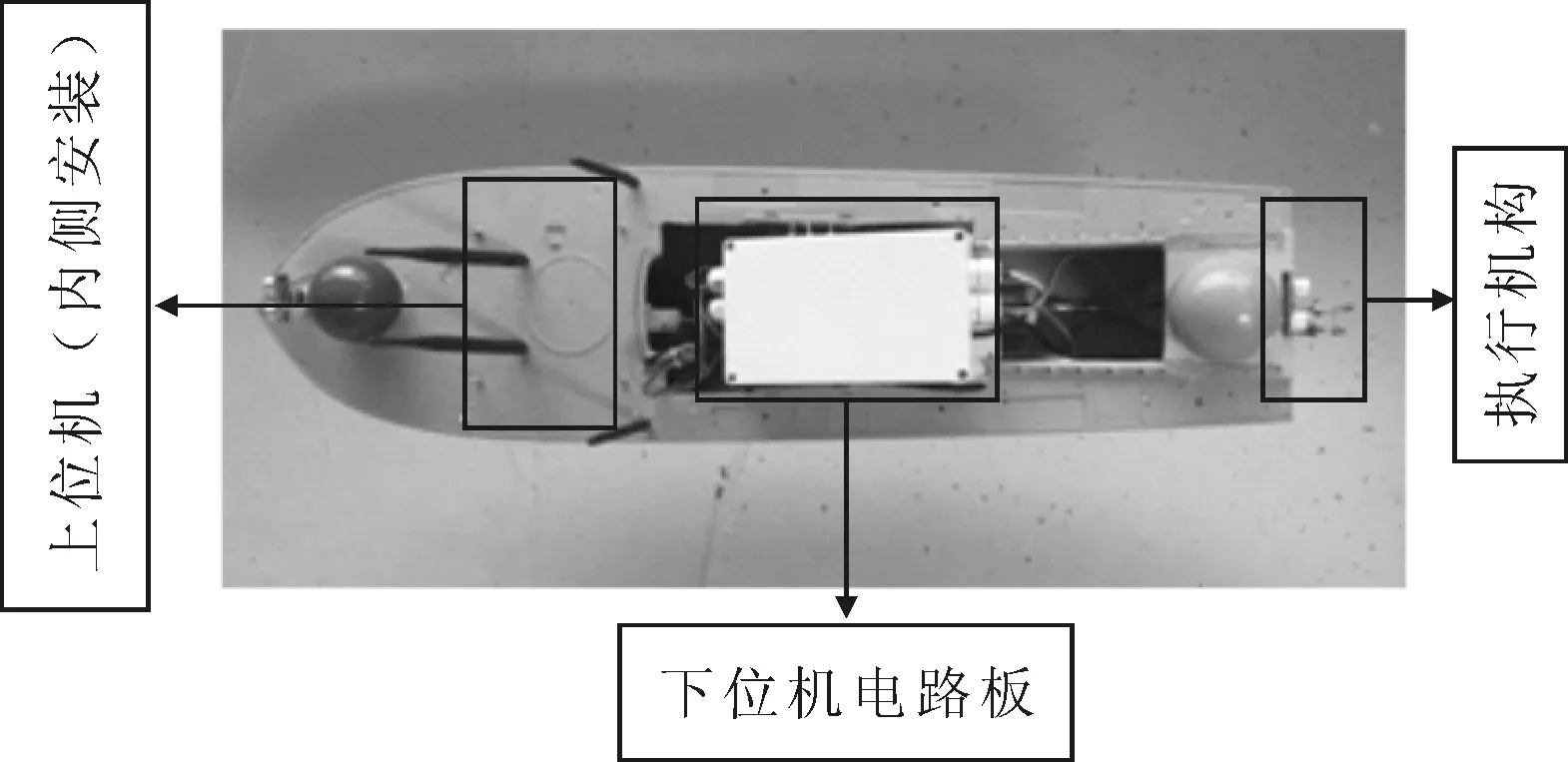
圖5 模型船
該模型船為一艘欠驅動魚雷艇的縮尺模型,船內安裝有硬件設計中所述的上位機和下位機,分別用于運行程序設計中所述的上位機程序和下位機程序。船尾安裝有控制系統的執行機構用以驅動舵槳來對船舶進行控制。
將無人船的航行任務設計為:一般航行任務為航跡跟蹤,緊急航行任務為避碰,航跡為閉合折線段,規定航跡和障礙物位置設定見表1。

表1 航跡和障礙物位置 dm
無人船跟蹤結果見圖6。其中虛線為規劃航跡,圓圈里的點為障礙物位置,實線為無人船實際航行的路徑。

圖6 跟蹤結果
從跟蹤結果可以看出,無人船能按照設定的軌跡航行,在航行過程中成功避開障礙物,并在避讓之后迅速回到航線上。實驗結果表明該混合式體系控制系統能實現在實時避碰的情況下完成自主航行的目標。
4結論
本文對所設計的混合式結構體系控制系統進行的無人船航行避碰實驗,說明了該控制系統對于復雜航行任務具有良好的適應能力,揭示了混合式結構體系對于緊急航行狀況的包容性。
相對于目前學者普遍研究的船舶分層遞階控制系統而言,本文所設計的無人船控制系統加入了對船舶航行事件優先級的劃分,并嘗試在軟硬件層構建了控制系統。但該系統存在的問題是:在采取不合適的信息閾值的情況下可能會導致無人船持續陷入反應式任務中,無法回歸全局的智能決策任務。在進一步的深入研究中可以考慮采取信息自適應閾值的設定方法來進一步提高控制系統的適應能力。隨著水上交通環境的多樣化、復雜化,船舶的無人化、自動化已經成為一個趨勢。所設計的無人船控制系統可以運用在小型無人測量船、無人巡邏艇等需要實現自主航行任務的船舶上,具有重要研究意義。
參考文獻
[1] MCGANN C, PY F, RAJAN K, et al. A deliberative architecture for AUV control[C].Robotics and Automation, 2008. ICRA 2008. IEEE International Conference on. IEEE,2008:1049-1054.
[2] 徐威,劉凱,孫銀健,等.開放式模塊化的無人平臺體系結構[J].計算機應用,2014(S1):301-305.
[3] 丁福光,付明玉.自主式水下潛器分層遞階控制系統[J].船舶工程,1996(2):51-53.
[4] 秦志斌,錢徽,朱淼良.自主移動機器人混合式體系結構的一種Multi-agent實現方法[J].機器人,2006,28(5):478-482.
[5] 吳恭興,萬磊,鄒勁,等.混合仿人智能圖式的無人艇自主駕控系統設計[J].控制理論與應用,2010,27(12):1647-1654.
[6] TECK T Y, CHITRE M, VADAKKEPAT P. Hierarchical agent-based command and control system for autonomous underwater vehicles[C]∥Autonomous and Intelligent Systems (AIS), 2010 International Conference on. IEEE,2010:1-6.
[7] ORTIZ A, BONNIN-PASCUAL F, GARCIA-FIDALGO E, et al. A control software architecture for autonomous unmanned vehicles inspired in generic components[C]∥Control & Automation (MED), 2011 19th Mediterranean Conference on. IEEE,2011:1217-1222.
[8] 修彩靖,陳慧.基于混合體系結構的無人駕駛車輛系統[J].農業機械學報,2012,43(1):18-2.
[9] 陳無畏,王檀彬,焦俊,等.基于信息融合的多智能體混合體系智能車輛導航[J].農業機械學報,2011,42(6):1-5.
[10] 徐嬋娟,石建軍,劉金超.駕駛執行過程研究概述[J].交通信息與安全,2015,33(1):16-21.
[11] 石建軍,李鵬飛,劉小明,等.道路通行行為研究進展及其展望[J].交通信息與安全,2015,33(2):1-9.
Unmanned Ship Control System Design Based on Hybrid Architecture
XIE Shuoa,b, LIU Chen-guanga,b, CHU Xiu-mina, WU Qinga,c
(a. Engineering Research Center for Transportation Safe;b. School of Energy and Power Engineering;c. School of Logistics Engineering,Wuhan University of Technology, Wuhan 430063, China)
Abstract:In order to improve the unmaned ship's abilities of autonomous navigation and collision avoidance in the complex environment, a control system based on the hybrid architecture which includes both reactive behavior and intelligent decision-making behavior is desgined. The system adds the analysis layer which includes the information analysis and the action analysis into ordinary three-layer hierarchical control system. The analysis layer adopts the weighting method to prioritize the ship sailing events. The high-priority event (collision avoidance) is carried out through reactive behavior, and low priority event (autonomous navigation) is carried out through intelligent decision-making behavior. The unmanned ship autonomous navigation and collision experiment verified that the system can satisfy the requirements of real-time collision avoidance in autonomous navigation.
Key words:unmanned ship; control system; hybrid architecture; priority-based
DOI:10.3963/j.issn.1671-7953.2016.03.009
收稿日期:2015-09-10
基金項目:湖北省自然科學基金(2015CFA111)
第一作者簡介:謝朔(1993—),男,碩士生 E-mail:xieshuo@whut.edu.cn
中圖分類號:U666.11
文獻標志碼:A
文章編號:1671-7953(2016)03-0039-04
修回日期:2015-11-29
研究方向:交通運輸工程
