首都機場測風系統故障診斷
2016-07-06 06:36:53崔屹
企業技術開發·下旬刊 2016年6期
關鍵詞:故障診斷
崔屹

摘 要:在首都國際機場,測風系統是最重要的觀測設備之一,文章簡要介紹了首都機場測風系統的工作原理,全面分析了引起測風系統故障的原因,并針對不同的故障給出解決方法.
關鍵詞:風傳感器;測風系統;故障診斷
中圖分類號:TH165+.4 文獻標識碼:A 文章編號:1006-8937(2016)18-0062-02
1 概 述
對于天空中的飛行器來說,風數據是最重要的氣象數據之一。因此測風系統成為現代的民用航空機場必備的標準氣象觀測設備。對于氣象機務人員來說,當測風系統出現故障時能夠及時準確地判斷出故障原因并快速維修好則能最大限度的減小氣象設備風險。本文首先介紹了首都機場的測風系統工作原理,然后列出風系統故障判斷的流程圖并進行詳細說明。最后介紹針對常見故障采取的措施。
2 首都機場測風系統工作原理
2.1 首都機場風數據處理流程
首都機場使用vaisala公司的WS425型風傳感器,采集器型號為MILOS520。風數據的處理流程為傳感器采集到原始數據后發送給采集器,采集器再將原始數據發送給系統主機,主機軟件對風的原始數據進行加工,加工后將處理好的數據發送給用戶。
2.2 超聲波風傳感器的測量原理
風傳感器是測風系統中最重要的組成部分,首都機場使用的是超聲波風傳感器。與過去的機械式傳感器相比較,該類型傳感器具有體積小、無機械部件、壽命長、精度高等特點。超聲波是指頻率大于20 kHz的聲波,很早人們就發現聲波在空氣中的傳播速度受空氣流動(即風)的影響,為此提出了利用測量聲波在已知距離的兩點之間傳播時間的變化來逆向推導兩點間風速的方法。發射探頭發射一組超聲波脈沖到達接收探頭,從向發射施加激勵脈沖起到接收到第一個脈沖止的超聲傳播時問,可以由下式計算:
其中,v0為靜風下的聲速,v為風速,L為傳播距離,當方向和超聲波傳播方向一致時為正,反之為負。但是 會受到環境影響,其變化會引入較大的風速測量誤差。因此后來又提出采用雙向測量的方法,同時測量兩個相對方向上傳播時間的變化來抵消靜聲速變化的影響: T2=L/(v0■v)兩個時間相減,得到風速測量公式:
顯然,式中已經抵消了Vo,相當于做了差分測量,消除了Vo影響,這種方法通常稱為“脈沖聲時法”。
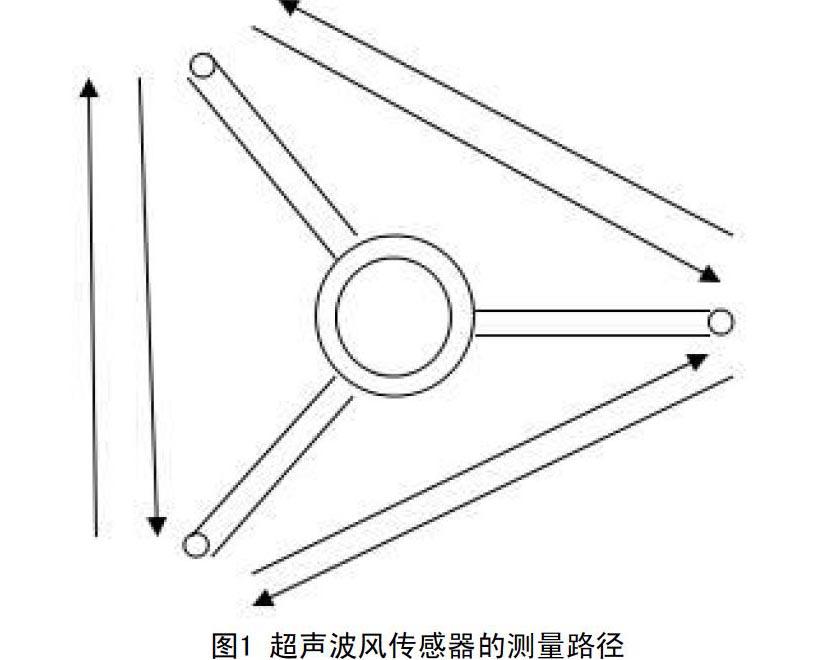
超聲波風傳感器的水平面上具有一個包含三個等間距的超聲波探頭的探頭陣列。風傳感器測量探頭陣列之間的三條路徑的傳送時間(雙向),如圖1所示。然后可以計算出三條超聲波路徑中每一條路徑的V.使用兩條探頭路徑的V值便足以計算風速和風向。
2.3 風速和風向平均值計算
超聲波風傳感器可通過標量或向量平均值計算為風速和風向提供平均值。對于這兩種方法,平均值是根據使用者可配置的平均時間來確定的。平均時間還會影響串行通信和模擬輸出。使用者也可以配置陣風平均時間以計算風極值。根據世界氣象組織 (WMO) 的建議,默認的陣風平均時間間隔為3 s。 如果選擇了標量平均值計算,則使用者還可以啟用風向移動以確保在風速較低的情況下獲得一致的風向測量結果。
2.3.1 標量平均值計算
如果選擇了標量平均值計算,超聲波風傳感器將會通過以下方式計算風速和風向平均值:從平均時間將每個風測量值加起來,然后將總和除以測量次數。每個連續的風速和風向測量之間的時間為0.25 s。風向是一個北向不連續的三角函數,在北向360 °等于零度。例如:
359 °+ 5 °= +4 °
0 °-5 ° = 355 °
超聲波風傳感器可將風向轉換為線性函數以確定風向平均值。例如:359 °+ 5 ° 轉換為364 °,然后進一步轉換為+4 ° 進行輸出。0 °- 5 °轉換為355 °。 這樣可確保風向平均值始終體現實際情況,即使在零方向的兩側單獨進行采樣也是如此。
如果數據采集系統在初始平均時間結束之前請求數據,傳感器將會返回最新完成的測量數據。
準確的風向測量要求風速足夠高。如果您啟用風向移動,則當風速低于選定的風向移動閾值時,超聲波風傳感器將不會計算風向。最后計算的風向輸出將保持不變,直到風速增加足以達到閾值并且超聲波風傳感器恢復正常操作為止。
2.3.2 向量平均值計算
如果選擇了向量平均值計算,超聲波風傳感器將會通過以下方式計算風速和風向平均值:從平均時間將每個x速度和y 速度測量值加起來,然后將總和除以測量次數。超聲波風傳感器可將生成的x平均速度和y平均速度轉換為極坐標方向和大小,從而返回以度為單位的風向平均值和選定單位的風速平均值。
如果數據采集系統在初始平均時間結束之前請求數據,傳感器將會返回最新完成的測量數據。
3 風系統的故障診斷
可能多種原因導致測風系統的故障,具體診斷流程圖,如圖2所示。
當風系統數據出現不正常時,首先判斷是否是異物所影響。最常見的情況是落鳥。設備正常工作時,在室內用遠程通訊軟件與采集器直接建立通訊聯系,應有原始的字符串傳過來,系統正常時軟件接收到的字符樣式如下:$PAMWV,341,R,008.1,M,A*3E.其中341為風向,008.1為風速,A*3E為效驗碼。當落鳥時通常仍然可以接收到字符串,但字符串中的各項數據往往不正確。例如$PAMWV,,R,,M,V*38該字符串中沒有風向和風速值,校驗碼為V*38,表示數據不正常。還有一種情況為風速出現與實際情況不符的極大值,出現一段時間后消失,此故障通常情況下也是由落鳥所引起的。
主機中的軟件故障也可以導致測風系統的失效。當系統顯示界面中所有的風數據均出現丟失,通常是由主機軟件故障所引起的。在主機的系統診斷軟件中查看各個數據“對象”的值,若風數據的原始值正常,但計算得到的平均值丟失則是計算程序出現故障。此時重啟風的計算服務,則系統可以恢復正常。
若只有某一個地點的風數據丟失,則通常是由采集器或傳感器的故障導致的。首先使用遠程通訊軟件連接采集器,若該采集器上其他的傳感器數據例如溫濕數據等均丟失,則應為采集器故障。若只有風數據丟失,則應為傳感器故障或傳感器與采集器之間的通訊故障。WS425型風傳感器是一種智能傳感器,它的風的測量數據通過串口直接發送給采集器,機務人員可以使用維修計算機直接與傳感器的串口建立連接,接收傳感器發送的數據。若接收到,則傳感器工作正常。若沒有則是傳感器與采集器之間的通訊故障導致。
4 針對系統故障采取的措施
針對首都機場的風系統的常見故障,機務人員采取了相應的措施。對于落鳥現象,機務人員自制了防鳥器。即在傳感器的表面安裝倒刺,使飛鳥無法落在上面。該防鳥器制作簡單,成本低廉,但效果十分明顯。另外WS425的替代品為WMT700,該傳感器可以倒裝,這也是解決落鳥問題的一種方法。
主機中關于風的計算程序故障是由于主機程序設計缺陷造成的。當操作人員對兩個風數據源互相手工備份時將有可能導致該程序異常。軟件升級是解決這一問題的最終辦法。在沒有升級前,加強人員管理,禁止互相手工備份風數據可以預防這種故障出現。
當WS425風傳感器出現故障時,需要及時地進行更換。目前廠家已經停止了WS425的生產,替代品為新型的傳感器WMT700。這兩種傳感器在硬件結構和軟件設置方面有了較大的變化。因此替換前要對WMT700進行相應的配置,保證各項參數與老傳感器保持一致。還需要從廠家另外購買兩個接口轉換頭才可以成功替換WS425。
參考文獻:
[1] 孟蕊.首都機場安檢系統優化設計研究[J].中國安防,2014,(20).
猜你喜歡
一重技術(2021年5期)2022-01-18 05:42:10
水泵技術(2021年3期)2021-08-14 02:09:20
裝備制造技術(2020年3期)2020-12-25 05:22:30
制造技術與機床(2018年11期)2018-11-23 01:07:42
電子制作(2018年10期)2018-08-04 03:24:46
制造技術與機床(2017年10期)2017-11-28 05:20:43
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
振動工程學報(2014年2期)2014-03-01 01:15:22
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
振動、測試與診斷(2014年4期)2014-03-01 01:14:00
