基于連接概率的VANETs路由協議研究
2016-07-09 14:27:15張莉華張得生
現代電子技術 2016年7期
張莉華 張得生
摘 要: 針對車載自組網VANETs的車間通信的連接問題進行分析。首先,假定車輛進入高速公路的時間間隔服從泊松分布,進而分析車輛間的通信連接性能。然后,推導了由[n]個車輛組成的通信連接概率的閉合表達式,同時,分析了在維持一定的連接概率時簇大小CLS和簇長度CLL的期望值,并討論了車輛傳輸范圍和密度對連接的影響,推導了滿足一定連接概率時的車輛傳輸范圍的臨界值。最后,提出基于連接概率的路由協議CPRP,選擇連接概率大的路徑作為數據傳輸通道。仿真結果表明,提出的CPRP改善了數據包傳遞率、端到端傳輸時延以及吞吐量性能。
關鍵詞: 泊松分布; 車間通信; 連接概率; 路由協議; 車載自組網
中圖分類號: TN915.05?34; TP393 文獻標識碼: A 文章編號: 1004?373X(2016)07?0019?05
Abstract: The communication connection among vehicles of the vehicular Ad Hoc networks (VANETs) is analyzed in this paper. It is assume that the time interval for the vehicles entering into the highway is subordinated to Poisson distribution, and then performance of the communication connection among vehicles is analyzed. The closed?form expression of communication connection probability composed of n vehicles is deduced, and the expectation values of CLS (cluster size) and CLL (cluster length) to maintain a certain connection probability are analyzed. The impact of transmission range and density of vehicles on the connection is discussed. The critical value of vehicles′ transmission range which can satisfy a certain connection probability is deduced. The connectivity probabilistic routing protocol (CPRP) is proposed to select the path with big connection probability as the data transmission path. The simulation results show that the proposed CPRP can improve the data packet delivery ratio, end?to?end transmission delay and throughput performance.
Keywords: Poisson distribution; vehicle?to?vehicle communication; connection probability; routing protocol; VANET
0 引 言
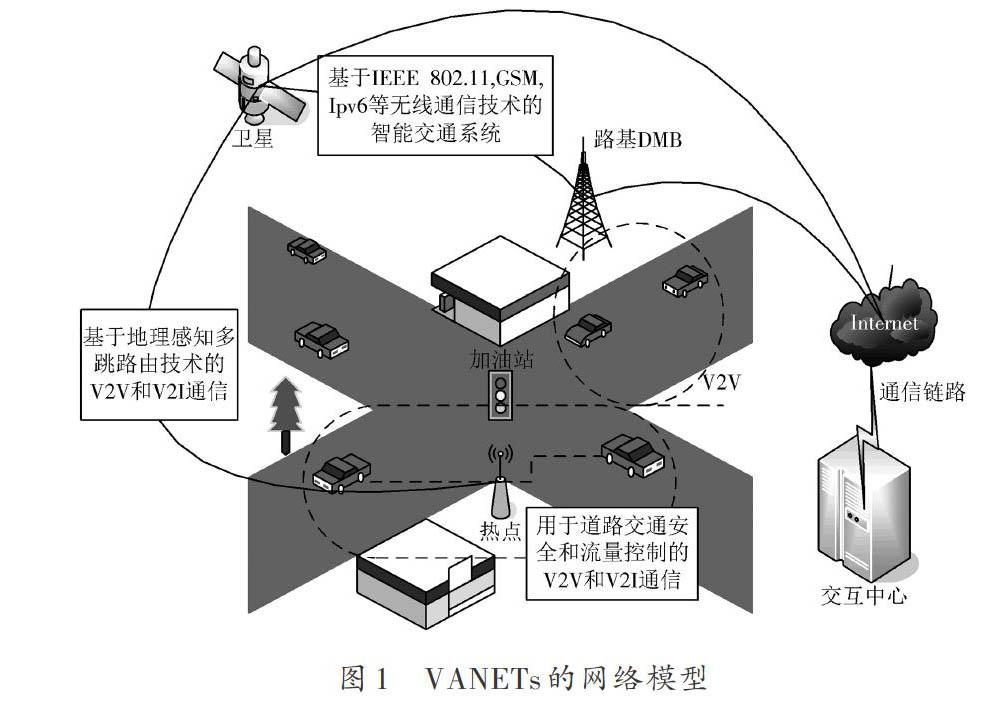
車載自組網VANETs(Vehicular Ad hoc Networks)屬于移動自組網MANETs(Mobile Ad hoc Networks)的特殊應用。在VANETs中,每個車輛裝有通信設備,并且車與車間形成車間通信V2V(Vehicle?to?Vehicle)以及車與路邊設施形成的車與路邊設施V2I(Vehicle to Infrastructure)通信,如圖1所示。VANETs的應用可以分為交通安全、交通效率以及增值服務[1]。安全應用的目的在于通過V2V通信提高行駛者的安全,如緊急事故預警。交通效率應用的目的在于優化交通流量,如交通平衡、縮短行程時間等。增值服務包括經濟廣播、娛樂服務,如網絡沖浪。
與其他的移動自組網相比,VANETs具有獨特的特性,如動態的拓撲、受限的移動模型。這些特性主要“歸功于”車輛的快速移動。在高速公路上,車輛行駛的速度平均達到100 km/s,增加車與車間通信連接(Connected)的難度,給車間通信V2V提出挑戰。
目前,VANETs中車間通信V2V連接問題已受到廣大工作人員的關注[2?4]。文獻[5]分析了基于連接距離的車間距離的分布,并指出速度對連接的影響。文獻[6]假定車輛速度變化為寬平穩,各態歷經隨機過程(Wide Sense Stationary Ergotis Random Process),進而分析V2V的連接問題。文獻[7]研究了一維VANETs的消息傳播參數,并指出了每跳時延和數據包碰撞對消息傳播的影響。
為此,本文假定車輛服從泊松分布(Poisson Distribution),并且車輛獨立地隨機選擇行駛速度,且保持勻速運動。基于這些假設,推導了車間通信V2V的連接概率,并給出維持一定連接概率所需的傳輸范圍,換而言之,即車輛的傳輸范圍對連接概率的影響。同時推導了簇大小CLS(Cluster Size)和簇長度CLL(Cluster Length)的期望值。簇大小CLS是指在已連接路徑中車輛的個數;簇長度CLL是指連接的距離。最后,提出基于連接概率的路由協議。仿真結果表明,提出的路由協議能夠有效地提高吞吐量和數據包傳遞率。
1 車間通信連接的分析
1.1 系統假設
(1) 車輛在間隔[[0,t]]進入車道,并服從泊松分布,且到達率為[λt];
(2) 車道長度[z=0,L];
(3) 車輛依據[fVυ]選擇行駛速度,且車輛間的速度選擇事件相互獨立。
2.2 路由方案
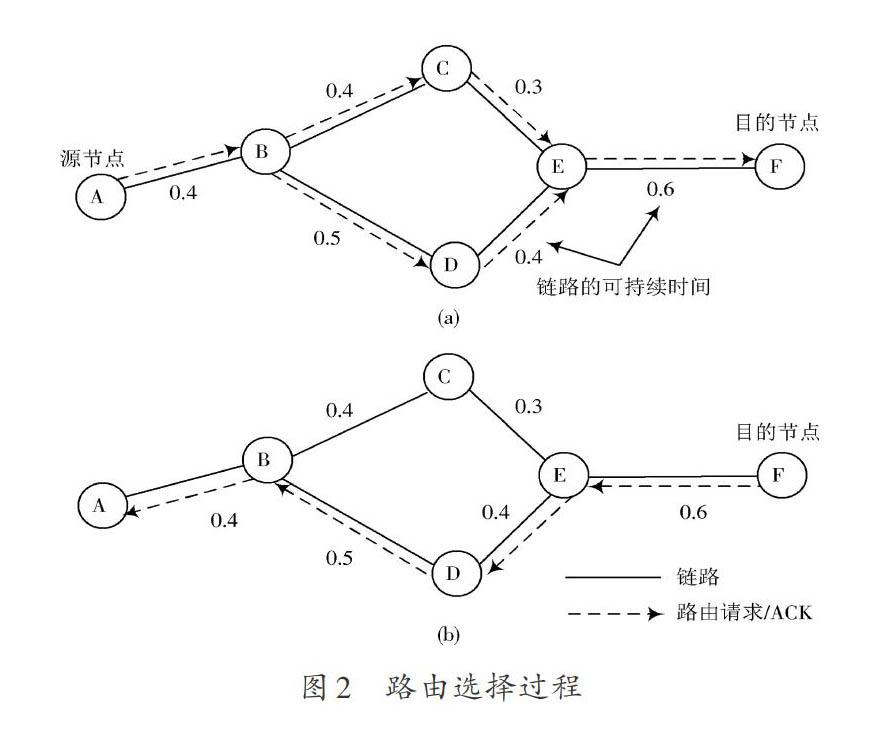
當源節點[i]需發送數據包時,節點[i]構建通往目的節點的路由。為此,節點[i]需在傳輸數據包前先發送路徑請求消息,記為Mes_Path。Mes_Path包含節點[i]的位置、速度、方向以及目的節點信息。鄰居節點收到來自節點[i]的請求消息后,計算離上一跳節點的連接概率。
如圖2所示,源節點A發送了路徑請求消息Mes_Path,目的節點為F。節點B,C,D以及E收到Mes_Path消息后,并附加各自的ID號以及與節點A的連接概率,再轉發。
為此,節點F收到來自兩條不同路徑消息,其中一條路徑[A,B,C,E,F,]各條鏈路連接概率分別為[0.4,0.4,0.3,0.6,]另一條路徑為[A,B,D,E,F,]各條鏈路連接概率分別為[0.4,0.5,0.4,0.6]。
依據式(26)可知,第一條路徑[A,B,C,E,F]的連接概率[PPathn]為0.028 8,而第二條路徑[A,B,D,E,F]的[PPathn]為0.048。這說明路徑[A,B,D,E,F]比路徑[A,B,C,E,F]更穩定。為此,節點F向節點A沿[A,B,D,E,F]回復確認消息ACK,如圖2(b)所示。
3 性能分析
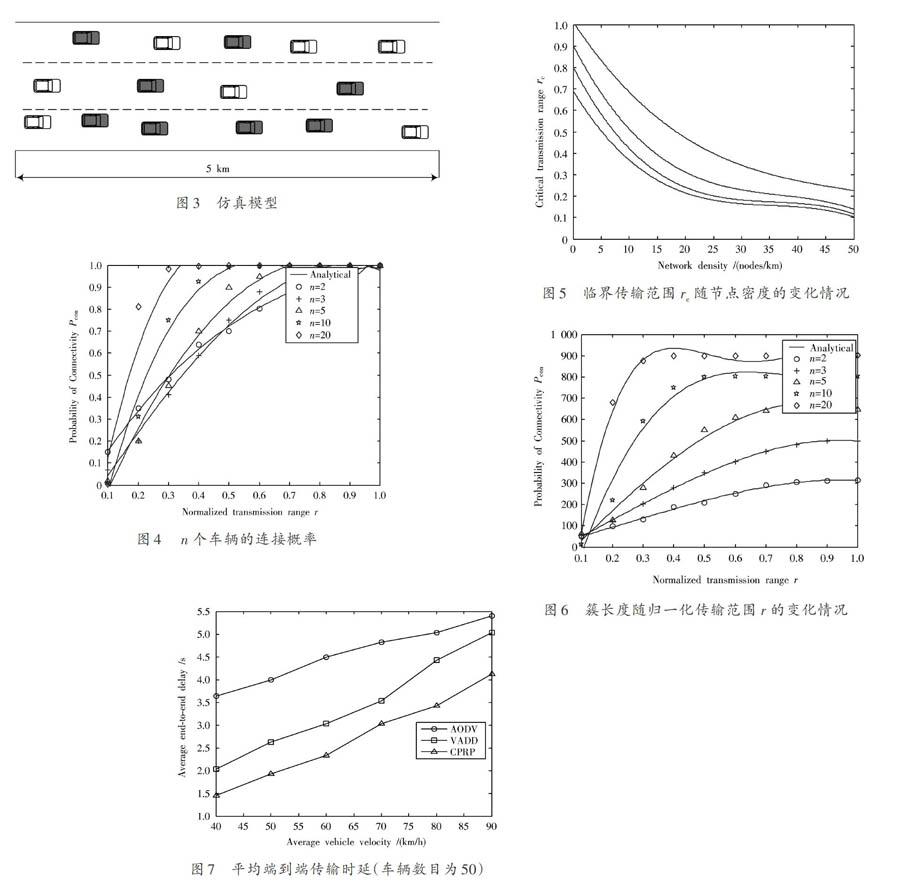
本節通過仿真驗證理論分析。利用Matlab軟件對長度[ZL=5 km]車道進行仿真,仿真時長為50 s,仿真模型如圖3所示。
3.1 連接概率分析
車輛依據泊松分布進入車道,每個車輛依據均勻分布[υmin,υmax]選擇行駛速度,且[υmax=40 m/s,][υmin=20 m/s]。每個實驗重復1 000次,取平均值作為最終的仿真數據。
圖5為臨界傳輸范圍[rc]隨節點密度的變化情況。從圖5可知,隨著車輛密度的增加,[rc]呈下降趨勢。此外,在相同的臨界傳輸范圍[rc]的情況下,維持高的網絡連接概率[Pcon,]需要增加節點密度。如當[rc]=0.5時,維持[Pcon]=0.999 9需要[n=17,]而[Pcon]=0.9僅需[n=6。]
圖6為平均簇長度[CL]隨歸一化傳輸范圍[r]的變化 情況,與式(23)相對應。從圖6可知,當[n=2,3]時,提高[r]并不能顯著增加[CL,]但是,當[n]比較大時,[CL]對[r]很敏感,即使[r]發生小幅度增加,[CL]也隨之變化。這與理論分析完全一致。
3.2 路由協議性能分析
分析車輛速度對提出的CPRP路由協議的端到端傳輸時延(E2E)、吞吐量(Throughput)以及數據傳輸速率的影響。
(1) 端到端傳輸時延。圖7為在車輛數目為50的環境下,變化的車速對端到端傳輸時延的性能影響。從圖7可知,端到端傳輸時延隨著車速的增加而增加。原因在于車速的提高,縮短了車間通信鏈路壽命,降低了連接概率,從而增加了端到端傳輸時延。與AODV,VADD相比,路由方案CPRP端到端傳輸時延下降,這要歸功于利用連接概率選擇路徑,降低連接斷裂的概率,提高路由的穩定性,從而降低了數據傳輸的端到端傳輸時延。
(2) 數據包傳遞率。圖8為數據包傳遞率隨車速變化的情況。從圖8可知,車速的增加,降低了AODV,VADD以及CPRP的數據包傳遞率,原因在于車速的增加,提高了連接斷裂的概率,延緩了數據包傳遞率。與AODV,VADD相比,CPRP方案的數據包傳遞率得到有效提高,原因在于CPRP方案降低了連接斷裂概率,增強了路由穩定性。
(3) 吞吐量。圖9描述了吞吐量隨車速的變化情況。從圖9可知,隨著車速的增加,降低了AODV,VADD以及CPRP方案的吞吐量,原因在于車速的提高,加速了鏈路的斷裂,提升了連接中斷概率,降低路由穩定性,進而降低吞吐量。在整個車速變化范圍內,提出的CPRP方案吞吐量優于AODV,VADD。
4 結 語
本文,首先假定車輛到達高速公路的時間間隔服從泊松分布,并且車輛獨立地隨機選擇行駛速度,且保持勻速運動。基于這些假設,推導了車載自組網的車間通信的連接概率,并給出維持一定連接概率所需的傳輸范圍。同時推導了簇大小CLS和簇長度CLL的期望值,并分析了網絡密度和傳輸范圍對連接概率的影響。最后,提出了基于連接概率的路由協議,擇優選擇連接概率高的路徑傳輸數據。仿真結果表明,提出的路由協議提高了吞吐量和數據包傳輸率,并降低了端到端傳輸時延。
參考文獻
[1] CASTEIGTS A, NAYAK A, STOJMENOVIC I. Communication protocols for vehicular Ad Hoc networks [J]. Wireless communication and mobile computing, 2011, 11(5): 567?582.
[2] DESAI M, MANJUNATH D. On the connectivity in finite Ad Hoc networks [J]. IEEE communication letters, 2002, 6(10): 437?439.
[3] GHASEMI A, NADER?ESFAHANI S. Exact probability of connectivity one?dimensional Ad Hoc wireless networks [J]. IEEE communications letters, 2006, 10(4): 251?253.
[4] PANICHPAPIBOON S, PATTARA?ATIKOM W. Connectivity requirements for self?organizing traffic information systems [J]. IEEE transactions on vehicular technology, 2008, 57(6): 3333?3340.
[5] YOUSEFI S, ALTMAN E, EL?AZOUZI R, et al. Analytical model for connectivity in vehicular Ad Hoc networks [J]. IEEE transactions on vehicular technology, 2008, 57(6): 3341?3356.
[6] WU J. Connectivity of mobile linear networks with dynamic node population and delay constraint [J]. IEEE journal on selected areas in communication, 2009, 27(7): 1218?1225.
[7] ZHANG Z, MAO G, ANDERSON B D O. On the information propagation process in mobile vehicular Ad Hoc networks [J]. IEEE transactions on vehicular technology, 2011, 60(5): 2314 ?2325.
[8] AGARWAL A, STAROBINSKI D, LITTLE T D C. Phase transition of message propagation speed in delay tolerant vehicular networks [J]. IEEE transactions on intelligent transportation systems, 2012, 13(1): 249?263.
[9] 洪棒,俞立,張貴軍.無線傳感網絡自適應分布式聚簇路由協議[J].自動化學報,2011,37(10):1197?1206.
[10] CHENG P C, LEE K C, GERLA M, et al. GeoDTN+Nav: geographic DTN routing with navigator prediction urban vehi?cular environments [J]. Mobile networks and applications, 2010, 15(1): 61?82.
[11] HARRI J, FIORE M, FILALI F, et al. Vehicular mobility simulation with VanetMobiSim [J]. Simulation, 2011, 87(4): 275?300.
