基于DSP+FPGA的兩軸穩定平臺控制系統設計
2016-07-09 21:05:59李衡曹文喆
數字技術與應用 2016年6期
關鍵詞:設計
李衡 曹文喆

摘要:為了實現兩軸穩定平臺的控制,設計了一種基于DSP+FPGA架構的伺服控制系統,描述了該系統的組成及工作原理,并給出了具體硬件電路設計和相關的軟件設計。開展相關驗證工作,結果表明,該系統具有較高的響應速度和穩定精度,兩軸的隔離度均小于2%,能夠有效的隔離載體擾動。同時,該系統為后續復雜的控制算法提供了驗證平臺。
關鍵詞:TMS320C28346 穩定平臺 控制系統 陀螺
中圖分類號:TP273 文獻標識碼:A 文章編號:1007-9416(2016)06-0006-03
穩定平臺控制系統由伺服控制器、穩定平臺以及負載等組成。在工作時,需要實時地獲取負載的角速度和角位置信息,從而形成一個閉環系統,通過不斷地調整姿態或位置來隔離載體運動帶來的干擾,從而精確保持動態姿態基準[1]。由于目前控制系統對精度、運算量以及實時性都有比較高的要求,所以通常采用DSP做為控制器的運算核心,使得復雜的算法以及功能能夠快速的實現。本文設計的穩定平臺控制系統采用TI公司的TMS320C28346DSP芯片作為運算單元,其工作頻率達到300Hz,具有強大浮點運算能力,片內集成了516KRAM,同時,本設計還有采用FPGA作為接口器件,能夠方便靈活的擴展A/D轉換器、D/A轉換器以及各種接口的傳感器。
1 系統結構及工作原理
穩定平臺主要由框架、角度傳感器、電機和速度傳感器組成,穩定平臺根據需求的不同,可以采用兩軸、三軸或兩軸四框架等結構形式,本設計中采用的是兩軸結構形式,組成框圖如圖1所示,外框架為方位框架,內框架為俯仰框架。
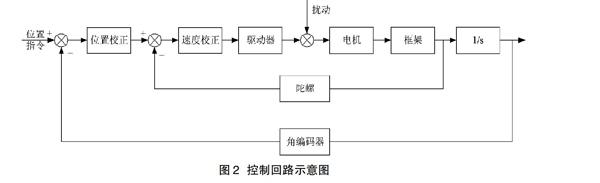
該穩定平臺具有方位和俯仰兩套獨立的穩定控制回路,兩個控制回路結合起來可使安裝內框的光學相機在空間中具有穩定視軸的功能。系統采用高精度光電編碼器作為角位置傳感器以及高精度的速率陀螺作為速度傳感器,方位框和俯仰框分別安裝一個陀螺,敏感軸與安裝框架旋轉方向平行,控制系統利用陀螺測量的空間角速率來構成速度穩定回路,當載體運動產生的擾動耦合到平臺時,其角速率被框架上的陀螺敏感,陀螺輸出的信號經控制系統處理后,產生的相反力矩來平衡干擾力矩,從而保證視軸在慣性空間的穩定。同時整個控制系統采用串級多閉環控制的結構形式,由內置外依次為速度穩定環以及位置環。穩定控制回路的示意圖如圖2所示。
2 硬件電路設計
2.1 電路總體設計
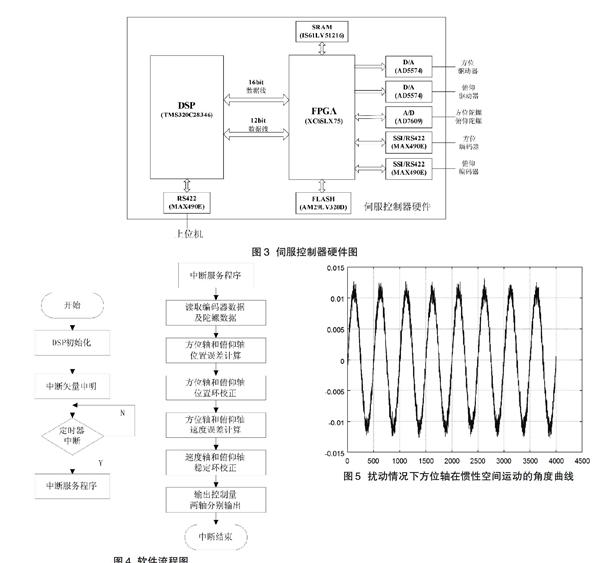
控制器硬件電路由TI公司的浮點DSPTMS320C28346,以及Xilinx公司的Spartan-6系列XC6SLX75 FPGA,以及外圍的輔助電路組成,輔助電路包括A/D轉換電路、D/A轉換電路、RS422接口電路以及電源電路、電平轉換電路和保護電路等。系統外擴了512K×16bit的SRAM作為運算數據存儲單元;外掛了8M×16bit的FLASH芯片用于程序存儲;采用一片AD7609外擴8路模數轉換輸入端口,用于陀螺數據的采集;采用2片AD5574作為數模輸出端口,將方位軸和俯仰軸的控制電壓輸出給電機驅動器;采用2片MAX490E做為RS422橋接芯片外接SSI接口的角編碼器;采用1片MAX490E連接TMS28346的SCIB接口用于DSP與上位機的通信。控制器硬件電路示意圖如下圖3所示。
2.2 主控制器特點
TMS320C28346基于TI現有的F2833X高性能浮點控制器,具有300MHz(3.33ns周期)的浮點性能,并具有516KB的片上RAM;高性能的32位CPU(TMS320C28x)包含IEEE-754單精度浮點單元;16×16和32×32位的乘法累加器,哈佛總線結構,具有6通道DMA,可用于McBSP,XINTF和SRAM;具有16位或32位的外部接口,超過2M×16地址范圍;具有3個32位CPU定時器,同時具有2個CAN總線接口,3個SCI接口,2個SPI接口以及1個I2C接口,還具有88個有輸入濾波功能且可單獨編程的多路復用通用輸入輸出(GPIO)引腳。本設計充分利用該DSP的特點,采用TI公司官方的參考設計,降低了系統硬件和軟件開發難度。
2.3 陀螺采樣電路設計
陀螺為穩定平臺的關鍵傳感器,這里選用的是模擬輸出的速率陀螺,陀螺輸出為電壓信號,輸出的電壓值與速度成正比,其輸出電壓的范圍為±10V,且對應速度范圍為±150°/s,根據陀螺輸出信號的特性,以及考慮到控制系統的擴展,本設計選用的A/D轉換芯片為AD7609,分辨率為18bit,具有8個通道,真差分輸入,輸入范圍為雙級性±10V,每個通道的采樣率為200k,片內還帶有二階抗混疊模擬濾波器,輸出接口可以是串行,也可以是并行,本設計中,為了節約FPGA的管腳,采用串行輸出的方式。
2.4 角度編碼器接口電路設計
本系統選用的是SSI接口的角度編碼器,SSI為同步串口信號,以RS422為物理接口,分為時鐘脈沖和數據兩個部分,FPGA產生時序脈沖,通過RS422芯片轉換成差分信號由發送端發送給編碼器,編碼器在接收到時鐘脈沖時,逐位按時鐘脈沖位數輸出編碼器數值,包括角位置、校驗信號或編碼器狀態,FPGA再通過RS422芯片的接收端口相關的數據,然后按規定編碼傳輸給DSP,DSP根據相關的數據格式進行角位置結算。
2.5 上位機接口
本設計采用TMS320C28346內部的SCI串行通信模塊,外接RS422橋接芯片MAX490E與上位機進行通信,通過對DSP內部的寄存器進行設置,對數據的位數,波特率,校驗位進行配置,上位機按約定的通信協議發送指令,DSP對指令進行響應,并控制兩軸框架進行相應的動作。
3 軟件設計及穩定平臺隔離度測試
本控制系統的軟件調試和開發均采用TI公司的CCS(Code Composer Studio)v3.3版本,該開發工具提供了可視化的窗口,便于用戶進行程序編寫、編譯和調試。軟件的構成包括DSP的初始化,定時器中斷程序等相關內容。對于方位軸和俯仰軸的位置環和速度穩定環分別采用PID算法進行校正,程序流程圖如下圖4所示。
軟件調試完成,對控制系統進行穩定隔離度的測試。測試時,將兩軸框架安裝于擾動臺上,對方位軸和俯仰軸的穩定隔離度分別進行測試。先測試方位軸,首先將位置環斷開,只采用速度穩定環,且速度輸入指令為0,在此軸向方向施加一個1°/2Hz的角擾動,通過安裝在框架上的角位置陀螺記錄方位軸在慣性空間中的運動角度。測試俯仰軸時的方法和測試方位軸一樣。
下圖5為方位軸在1°/2Hz擾動下在慣性空間中運動的角度波形,縱坐標表示角度,單位為°,橫坐標表示時間,單位為ms,可以看出最大值約為0.0123°,可計算出穩定平臺方位的隔離度約為 1.23%。下圖6為俯仰軸在1°/2Hz擾動下在慣性空間中運動的角度波形,其縱坐標表示角度,單位為°,橫坐標表示時間,單位為ms,可以看出最大值約為0.0174°,可計算出穩定平臺俯仰隔離度約為 1.74%。
4 結語
本文介紹了基于DSP 和FPGA的兩軸穩定平臺的伺服控制系統的設計,本設計采用DSP實現相關的控制算法,并采用FPGA作為接口擴展器件,解決了不同接口傳感器信號接入問題,且具有很強的靈活性,方便后期采用不同接口的傳感器。系統中采用速率陀螺作為反饋器件完成速度穩定回路的控制,在對方位軸與俯仰軸的穩定隔離度測試中,兩軸的隔離度均小于2%。研究表明,該系統具有較高的響應速度和穩定精度,設計合理,同時為后續復雜的控制算法提供了驗證平臺。
參考文獻
[1]張智永,周曉堯,張連超.穩定平臺中通用陀螺數據采集處理系統[J].兵工自動化,2011,30(2):55-57.
[2]范大鵬.《光電穩定伺服機構控制技術》專題文章導讀[J].光學精密工程,2006,14(4):673.
[3]畢永利,劉洵,葛文奇等.機載多框架陀螺穩定平臺速度穩定環設計[J].光電工程,2004,31(2):16-18.
[4]劉金琨.先進PID控制MATLAB仿真(第3版)[M].北京:電子工業出版社,2011.
[5]任潤柏,周荔丹,姚鋼.TMS320F28x源碼解讀[M].北京:電子工業出版社,2010.
[6]楊景照,劉政華.二維瞄準儀穩定平臺控制系統設計于仿真[J].機電工程,2009(11):80-82.
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
